Министерство образования и науки Российской Федерации
Уральский федеральный университет
имени первого Президента России Б.Н.Ельцина
Физико-технический факультет
Кафедра технической физики
Б. Т. ПОРОДНОВ
МЕХАНИКА СПЛОШНЫХ СРЕД
ЧАСТЬ 1. ТЕОРИЯ УПРУГОСТИ
Учебное пособие
Научный редактор канд. физ.-мат. наук Б. А. Калинин
Екатеринбург
УрФУ
2010
УДК 530.1(075.8)
ББК 22.25я73
П59
Рецензенты: заведующий кафедрой общей и молекулярной физики
Уральского государственного университета, проф., д - р физ. - мат. наук
С. Ф. Борисов; ведущий научный сотрудник Института теплофизики Уральского
отделения Российской академии наук, проф., д-р. физ.-мат. наук В. Н. Скоков
П59
Породнов Б. Т.
МЕХАНИКА СПЛОШНЫХ СРЕД. Часть I. Теория упругости:
учебное пособие / Б. Т. Породнов. – Екатеринбург: УрФУ, 2010. 84 с.
ISBN 978-5-321-01872-9
Учебное пособие для студентов кафедры технической физики физикотехнического факультета УрФУ подготовлено в соответствии с рабочими
программами дисциплин «Механика сплошных сред» и «Гидрогазодинамика».
Содержит разделы: кинематика сплошной среды, тензор напряжений, закон
Гука, а также фундаментальную замкнутую систему уравнений сохранения
движущейся сплошной среды. В приложении приведены основные сведения о
пластических деформациях.
Библиогр.: 15 назв. Рис. 15. Табл. 1.
УДК 530.1(075.8)
ББК 22.25я73
ISBN 978-5-321-01872-9
© УрФУ, 2010
© Породнов Б. Т., 2010
ОГЛАВЛЕНИЕ
Предисловие......................................................................................................... 5
1. ВВЕДЕНИЕ В МЕХАНИКУ СПЛОШНЫХ СРЕД ............................................. 6
1.1. Модели механического движения............................................................... 6
1.2. Бесконечно малые в МСС. Пределы применимости МСС ...................... 7
1.2.1. Элемент объёма в МСС .................................................................... 8
1.2.2. Малый промежуток времени в МСС............................................. 11
2. КИНЕМАТИКА СПЛОШНОЙ СРЕДЫ.............................................................. 12
2.1. Деформация ................................................................................................ 12
2.2. Тензор поворота.......................................................................................... 14
2.3. Тензор деформации .................................................................................... 16
2.3.1. Изменение объёма тела при деформации ..................................... 17
2.3.2. Геометрические свойства линейных деформаций....................... 18
2.3.3. Эллипсоид деформации.................................................................. 20
2.4. Температурная деформация ...................................................................... 21
2.5. Теорема Коши-Гельмгольца ...................................................................... 22
3. ТЕНЗОР НАПРЯЖЕНИЙ ..................................................................................... 24
3.1. Силы массовые, объёмные и поверхностные.......................................... 24
3.1.1. Массовые силы................................................................................ 24
3.1.2. Силы поверхностные ...................................................................... 24
3.1.3. Тензор напряжений ......................................................................... 26
3.2. Результирующая сила, действующая на единицу единицу
объема тела .................................................................................................. 28
4. ТЕРМОДИНАМИКА ДЕФОРМИРОВАНИЯ .................................................... 30
4.1. Работа сил внутренних напряжений ........................................................ 30
4.2. Основное термодинамическое равенство ................................................ 31
5. ЗАКОН ГУКА ........................................................................................................ 33
5.1 Свободная энергия деформируемого тела ................................................ 33
5.2. Закон Гука ................................................................................................... 35
5.3. Однородная деформация тела .................................................................. 37
5.3.1. Растяжение стержня....................................................................... 37
5.3.2. Модуль Юнга и коэффициент Пуассона –
феноменологические коэффициенты ................................................. 38
5.4. Свободная энергия неизотермического деформирования...................... 41
5.4.1. Тензоры деформаций и напряжений при
неизотермическом деформировании .................................................. 41
5.4.2. Адиабатические и изотермические модули.................................. 42
4
6. ФУНДАМЕНТАЛЬНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ
СПЛОШНОЙ СРЕДЫ ........................................................................................ 45
6.1. Тензор скоростей деформации.................................................................. 45
6.2. Дифференцирование по времени интеграла по подвижному
объёму .......................................................................................................... 46
6.3. Уравнение непрерывности ........................................................................ 46
6.3.1. Различные формы уравнения непрерывности ............................. 46
6.3.2. Интегральная и дифференциальная форма уравнения
непрерывности с источниками и стоками ......................................... 48
6.4. Уравнение сохранения количества движения ......................................... 49
6.4.1. Вывод уравнения сохранения количества движения................... 49
6.4.2. Субстанциональное и локальное описание движения ................ 50
6.5. Уравнение сохранения момента количества движения сплошной
среды ............................................................................................................ 51
6.6. Тензор плотности потока импульса.......................................................... 54
6.7. Уравнение сохранения внутренней энергии............................................ 55
6.8. Вектор плотности потока полной энергии. Вектор Умова –
Пойтинга ...................................................................................................... 57
6.9. Фундаментальная замкнутая система уравнений движения
сплошной среды.......................................................................................... 59
6.10. Тензор вязких напряжений ...................................................................... 62
6.11. Модели сплошных сред ........................................................................... 64
6.11.1. Твердое тело................................................................................... 64
6.11.2. Жидкость ........................................................................................ 65
6.11.3. Газы................................................................................................. 65
6.11.4. Релаксация напряжений................................................................ 65
6.12. Упругие волны .......................................................................................... 66
БИБЛИОГРАФИЧЕСКИЙ СПИСОК .............................................................. 70
ПРИЛОЖЕНИЕ. ПЛАСТИЧЕСКИЕ ДЕФОРМАЦИИ ......................................... 71
П 1. ПРЕДМЕТ РЕОЛОГИИ .................................................................................... 71
П 1.1. ВЯЗКОУПРУГОСТЬ .............................................................................. 71
П 1.2. ПОЛИМЕРНЫЕ ВЕЩЕСТВА ................................................................. 72
П 1.3. ПЛАСТИЧЕСКИЕ ДЕФОРМАЦИИ. ДИСЛОКАЦИИ И ВАКАНСИИ ........... 73
П 1.4. ЭФФЕКТ ПАМЯТИ ФОРМЫ ................................................................. 74
П 2. ХАРАКТЕРИСТИКИ ЭФФЕКТА ПАМЯТИ ФОРМЫ ................................. 77
П 3. МАТЕРИАЛЫ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ .................................... 78
БИБЛИОГРАФИЧЕСКИЙ СПИСОК П .......................................................... 83
5
ПРЕДИСЛОВИЕ
В данном учебном пособии изложены основные закономерности при
движении сплошных сред и соответствующие уравнения сохранения, наиболее
распространённые методы их решения, описывающие широкий круг
физических явлений и практических задач движения жидкостей и газов с до- и
сверхзвуковыми скоростями при наличии пограничных слоёв и турбулизации
потока. В последней главе представлены основные закономерности при
движении плазмы.
Учебное пособие соответствует утверждённой учебной программе и
предназначен для студентов физико-технологического института, студентам
специальностей и специализаций физического профиля других факультетов, а
также аспирантам, бакалаврам и магистрам физических и физико-химических
специальностей университета
В основу данного пособия положены лекции, которые были прочитаны в
1960-х-начале 70-х гг. студентам кафедры молекулярной физики заведующим
этой кафедры, профессором, доктором физико-математических наук Суетиным
Паригорием Евстафьевичем. Некоторые лекции и части разделов неоднократно
читались студентам других кафедр физико-технического и других факультетов
университета доцентом, кандидатом технических наук Ивакиным Борисом
Александровичем и доцентом, кандидатом физико-математических наук
Калининым Борисом Алексеевичем.
Компьютерный вариант конспекта лекций подготовлен совместно со
студентами кафедры молекулярной физики В. А. Дублёных и Д. В.
Румянцевым.
6
1. ВВЕДЕНИЕ В МЕХАНИКУ СПЛОШНЫХ СРЕД
Механика сплошных сред (МСС) – раздел теоретической физики, в
котором изучаются свойства движения газов, жидких и твердых
деформируемых тел, а также плазмы. Все перечисленные состояния вещества
объединяют понятием среда.
1.1. МОДЕЛИ МЕХАНИЧЕСКОГО ДВИЖЕНИЯ
В развитии физики модели изучаемых явлений играют очень большую
роль. Только построив и приняв определенную модель (желательно сначала
наиболее простую), возможно описать явление математически и изучить
главные, характерные и основные свойства изучаемого физического явления.
Сравнение теоретически получаемых результатов с опытом подтверждает или
отвергает адекватность построенной модели изучаемому явлению. Если
характерные основные черты физического явления хорошо описываются
принятой моделью, то предоставляется дальнейшая возможность для
усложнения модели с целью описания более тонких деталей изучаемого
явления. Если же сравнительно простая модель приходит в противоречие с
опытом, то модель построена неправильно, что свидетельствует о нашем
непонимании самого существа явления и необходимо или усложнить модель,
или, что чаще всего, опираясь на экспериментальные факты, глубже вникнуть в
физическую сущность явления и существенно изменить модель.
Изучение механического движения реальных тел по традиции
начинается с модели движения материальной точки. Это самая простейшая
модель движения реальных объектов. В этой модели предполагается, что
основные свойства движения реальных тел можно изучить, не принимая во
внимание их протяжённость и деформируемость. При этом математический
аппарат, описывающий такую модель, наиболее прост. Физическое состояние
тела характеризуется только его массой, а положение в пространстве – только
тремя обобщёнными координатами. Однако даже при такой простейшей модели
удалось изучить много основных черт движения реальных тел и установить
фундаментальные законы движения: например, вывести законы сохранения
количества движения и момента количества движения, законы сохранения
механической энергии, законы движения центра масс системы частиц и т.д. На
их основе изучены законы свободного падения тел, движения небесных
объектов, решено много других задач, имеющих важное практическое значение.
Кажется удивительным, что такая простейшая модель во многих случаях
позволяет описать движение с очень большой точностью, как, например, в
небесной механике.
7
Но в то же время существует достаточно много практических задач,
которые не могут быть решены при помощи модели, игнорирующей размеры
реальных тел (например, движение волчков, гироскопов и т.д.). Поэтому
необходимо перейти к более сложной модели – модели движения абсолютно
твёрдого тела, т.е. тела, которое имеет реальные размеры и в котором
расстояние между любыми точками не изменяется в процессе движения. Это
более сложная модель и математически сложнее. Для её описания необходимо
знать не только массу тела, но и три её момента инерции относительно трёх
взаимно-перпендикулярных осей. Положение же тела определяется уже не
тремя, а шестью координатами, три из которых декартовые координаты какойлибо точки тела и три компоненты скорости или импульса тела в скоростном
или импульсном пространстве, а также тремя эйлеровыми углами, которые
определяют положение тела в пространстве. Это уже более реальная модель:
она позволяет понять и рассчитать движение волчков и гироскопов, а также
решить ряд других практических задач.
Тем не менее остается обширнейший класс явлений, которые не могут
быть поняты и в рамках модели абсолютно твердого тела: например, движение
жидкостей, газов и упругих тел, при котором расстояние между двумя точками
явно и существенно изменяется в процессе движения. Этот факт является
важным для описания большого круга явлений, окружающих нас и требующих
своего практического решения.
Таким образом, приходим к ещё более сложной модели – модели
движения деформируемого тела, являющейся предметом изучения механики
сплошных сред. Усложнение предыдущей модели твердого тела заключается в
том, что в процессе движения расстояния между любыми точками тела
изменяются (тело деформируется). Конечно, с усложнением модели
существенно усложняется и математический аппарат. В общем случае к
имеющимся характеристикам движения абсолютно твёрдого тела необходимо
будет добавить ещё девять, характеризующих деформацию тела в любой точке в
процессе движения.
1.2. БЕСКОНЕЧНО МАЛЫЕ В МСС. ПРЕДЕЛЫ ПРИМЕНИМОСТИ МСС
Понятие сплошная среда также является некоторой физической моделью
реальных тел. Хотя все физические тела состоят из отдельных молекул и
атомов, масса которых сосредоточена в их ядрах, подавляющая часть
пространства, занятого телом, ″пустая″ (действительно, размер ядра атома
∼10-12 см, а размер атома ∼10-8 см). В МСС предполагается, что вещество тела
распределено непрерывно по его объёму и, например, плотность его является
непрерывной функцией координат и времени. Будем полагать также, что и
другие характеристики тела являются непрерывной функцией координат и
8
времени. Такая модель позволяет нам воспользоваться математическим
аппаратом традиционного дифференциального и интегрального исчисления.
Этот аппарат и модель сплошной среды заставляют физически определенно
указать, что понимается под бесконечно малыми в МСС.
1.2.1. Элемент объёма в МСС
Изучая движение сплошной среды, будем разбивать её на некоторые
малые части, в пределах которых все их физические характеристики можно
считать примерно постоянными. Характеристики изменяются лишь при
переходе от одной малой части среды к другой соседней части. Это изменение
происходит непрерывно в зависимости от их координат и времени.
Ясно, что эта малая часть – элемент объёма ΔV – должна быть много
меньше объёма рассматриваемого тела V с тем, чтобы можно было
воспользоваться методами дифференциального исчисления. С другой стороны,
этот элемент объёма все же должен быть достаточно большим, чтобы содержать
достаточно большое число молекул вещества для того, чтобы все его
физические характеристики имели бы смысл. В самом деле, если этот элемент
объёма будет содержать мало молекул, то становятся неопределенными такие
характеристики вещества, как температура, давление и плотность в этом
элементе объема. Флуктуации этих характеристик будут столь большими, что
мы не сможем сказать ничего достаточно определенного об их величине в
данный момент времени в данной точке пространства, занятого телом.
Таким образом, требование, предъявляемое в МСС к элементу объёма
ΔV, можно записать следующим образом. Пусть L есть характерный линейный
размер тела (например, диаметр шара или длина ракеты). Тогда величина L3
определяет порядок объёма тела. Далее, если l есть среднее расстояние между
молекулами, то можно считать, что в объёме l3 находится одна молекула. Если в
1 см3 находится n молекул, то очевидно l 3 ⋅ n = 1 см3 и тогда l = n −1 / 3 . Поэтому
элемент объёма в механике сплошных сред должен удовлетворять следующему
неравенству:
l 3 << ΔV << L3 .
(1.1)
Нетрудно видеть, что понятие бесконечно малого объёма в МСС
является понятием относительным. Например, в объёме V = 1 см3 при давлении
760 мм рт.ст. и температуре 293К находится количество молекул, определяемое
числом Лошмидта и равное No=2,687·1019 молекул/см3. Рассмотрим элемент
объёма ΔV с размером ребра куба 0,1 мм. Тогда ΔV = 10-6 см3. Размер молекул
газа можно принять равным l = 5Ǻ=5·10-8 см. Тогда элементарный объём имеет
порядок 10–22 см3. Таким образом, в рассматриваемом случае получаем
неравенство
9
l 3 = 10− 22 см3 << ΔV = 10-6 см3 << V = 1 см3.
Причем в элементе объёма ΔV содержится 1013 молекул, которых вполне
достаточно для статистического определения давления и температуры, а также
других макроскопических параметров газа.
Далее рассмотрим движение ракеты с характерным размером L~1 м в
межзвездном газе, состоящем из нейтральных атомов водорода. Если
воспользоваться для описания этого движения методами МСС, то в качестве
элемента объёма необходимо взять ΔV = 1 см3. Тогда, естественно, выполняется
правая часть неравенства (1.1), т.к. ΔV/L3~10 -6. Однако известно, что в
выбранном элементе объёма межзвездного газа находится лишь одна частица и
то лишь в среднем. Подавляющее время движения этот элемент объёма будет
пустым. Очевидно, в этом случае невозможно определить в элементе объёма ΔV
температуру и давление газа как непрерывную функцию координат и времени.
Следовательно, использование методов МСС для описания движения ракеты в
межзвездном газе является некорректным.
Рассмотрим аналогичный пример: движение Земли в межзвездном газе.
Объём Земли по порядку величины равен L3~1012 км3. Выберем элемент объёма
ΔV = 1 км3. Такой выбор ΔV полностью удовлетворяет неравенству (1.1), т.к. в
выбранном элементе объёма содержится 1015 атомов, которых достаточно для
статистического определения физических характеристик элемента объёма газа.
Следовательно, задачу о движении Земли в межзвездном газе можно решить
методами МСС, если бы ни еще одно физическое обстоятельство, которое
нельзя игнорировать при выборе элемента объема среды.
Вышеприведенное определение малого элемента объёма ∆V как объёма,
содержащего достаточно большое число молекул, безусловно справедливо для
жидкостей и твёрдых тел, в которых среднее расстояние между атомами и
молекулами порядка размеров самих атомов и молекул. Поэтому это
″достаточное″ число молекул одновременно означает достаточное число
взаимодействующих между собой молекул. С физической точки зрения именно
взаимодействие между молекулами является тем механизмом, при помощи
которого в нём обеспечивается усреднение и непрерывное распределение его
свойств.
Однако такое определение явно недостаточно для бесконечно малого
элемента объёма в газе. Действительно, в разреженном газе часто можно легко
удовлетворить правую часть неравенства (1.1) и указать такой элемент объёма,
который будет содержать еще большое число частиц, достаточное для
определения средних макроскопических характеристик этого элемента объёма.
Но внутри этого элемента объёма молекулы могут и не сталкиваться, т. е. не
10
взаимодействовать друг с другом. Следовательно, макроскопические
характеристики этого элемента объёма не будут функциями его координат.
Поэтому для газов неравенство (1.1) необходимо заменить более жестким
условием
λ3 << ΔV << L3 .
(1.2)
Здесь λ есть средняя длина свободного пробега молекул в газе. Для оценки
величины λ можно воспользоваться известной формулой
λ ~ (n ⋅ σ 2 ) , где σ
−1
~10-8 см есть диаметр молекулы. Неравенство (1.2) гарантирует, что в
выбранном элементе объема находится не просто достаточное число молекул, а
достаточное число взаимодействующих, т. е. сталкивающихся, молекул.
Если вновь вернуться к задаче о движении Земли в межзвёздном газе, то
легко убедиться, что левая часть неравенства (1.2) не выполняется.
Действительно, поскольку n = 1 молекул/см3, то λ ∼1011 км и λ3∼1033 км3. В
качестве же элемента объёма был выбран объем ΔV = 1 км3. Таким образом,
λ3>>ΔV . Это означает, что в выбранном элементе объёма атомы межзвездного
газа не сталкиваются. Формальное же усреднение их характеристик дает
некоторую макроскопическую величину, которая является характеристикой не
данного элемента объёма, а объема λ3, чья величина значительно превышает
объём самой Земли и сравнима с объёмом солнечной системы. Поэтому и эта
задача не может быть решена методами МСС. Она может быть успешно решена
методами кинетической теории газов, которая строится на основе дискретного
молекулярного строения вещества.
Несколько другие соотношения получаются, если учесть, что
межзвёздный газ состоит из ионизованного водорода, т. е. электронов и
протонов. В этом случае длина свободного пробега частиц существенно
уменьшается, и появляется возможность использовать методы МСС для
решения подобных задач (например, обтекание Земли ″солнечным ветром″).
В принципе любую задачу о движении тел, состоящих из отдельных
молекул, можно решить методами кинетической теории. Однако такой подход
во многих случаях оказывается чрезвычайно сложным, содержащим слишком
много несущественных для рассматриваемых задач подробностей. МСС же в
рамках сформулированной модели позволяет получить во многих практически
важных случаях вполне приемлемые решения, хорошо совпадающие с опытом.
В МСС разработан свой достаточно специфический математический аппарат,
позволяющий успешно решать практические задачи.
11
1.2.2. Малый промежуток времени в МСС
Совершенно ясно, что бесконечно малый промежуток времени Δ t в
методах дифференциального исчисления должен быть мал по сравнению с
характерным временем решаемых задач. Для периодических движений он
должен быть значительно меньше периода движения, для неустановившихся
движений – значительно меньше времени установления стационарного
движения или времени релаксации физических параметров состояния tp .
С другой стороны, бесконечно малый промежуток времени должен быть
значительно больше характерных времен молекулярного движения τм. Полагая,
что в элементе объёма все физические характеристики рассматриваемого тела
постоянны, необходимо выбрать бесконечно малый промежуток времени,
достаточный для выравнивания этих характеристик внутри выбранного
элемента объема. Для газов мерилом этого времени τм может служить время
взаимодействия молекул, для твёрдых тел и жидкостей - период колебаний
молекул или атомов кристаллической решётки или время локализации
молекулы в данной точке неподвижной жидкости. Таким образом, бесконечно
малый промежуток времени в МСС должен удовлетворять неравенству:
τ м << Δ t << t p .
(1.3)
Левая часть неравенства должна выполняться еще и потому, что силы,
действующие между молекулами вещества, являются близкодействующими.
Поэтому передача взаимодействия между различными соседними элементами
тела может осуществляться только через движение молекул, находящихся на
границе этих частей. Следовательно, при временах, меньших или порядка τм,
просто не существует взаимодействия между соседними элементами объема, а
стало быть отсутствует механизм, при помощи которого непрерывно
изменяются физические характеристики этих элементов.
12
2. КИНЕМАТИКА СПЛОШНОЙ СРЕДЫ
2.1. ДЕФОРМАЦИЯ
Кинематика (от греческого слова kinema – движение) – это раздел
механики, в котором изучаются геометрические свойства движения тел без
учёта их масс и действующих на них сил. В зависимости от свойств изучаемого
движения кинематику подразделяют: на кинематику материальной точки,
кинематику абсолютного твердого тела и кинематику непрерывно
изменяющейся среды (деформация твердого тела, жидкости или газа).
В кинематике сплошной среды задача заключается в том, чтобы
составить уравнение движения некоторого элемента объёма (или массы) тела.
Под влиянием внешних сил или при изменении температуры тело изменяет
свою форму и объём, поэтому расстояние между двумя любыми соседними
точками изменяется, т. е. тело деформируется.
x3
P'
r'
Q'
dr '
du
u(r+dr)
u(r) dr
r
P
Q
r + dr
х2
x1
Рис. 2.1
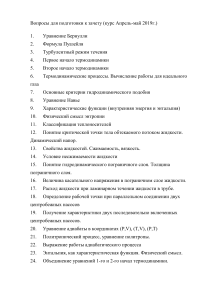
Рассмотрим в декартовой системе координат некоторое тело (рис. 2.1).
Обозначим оси координат через xi (i = 1, 2, 3). Выделим бесконечно малый
элемент объёма тела, расположенный около точки P. Положение точки P можно
характеризовать радиусом-вектором r = ( x1 , x2 , x3 ) . После приложения к телу
внешних сил в целом неподвижное тело деформируется, и точка P перейдет в
другую точку пространства P′, характеризуемую радиус-вектором
r′ = ( x1′, x2′ , x3′ ) . Смещение точки P, равное
u(r) = r ′ − r , ui (r ) = x i′ − x i ,
13
называют деформацией или вектором смещения, или просто смещением.
Для неизотропного тела деформация является функцией координат точки
P, т. к. в других точках тела она может быть и другой. Задание вектора u как
функции r во всех точках тела полностью определяет деформацию тела.
Теперь рассмотрим деформацию в точке Q, лежащей около точки P в
дифференциальной окрестности первого порядка. После деформации точка Q
перейдет в другую точку пространства – точку Q′ с радиусом-вектором r′+ dr′ .
Необходимо связать деформацию в точке P с деформацией в точке Q.
Из рис. 2.1 очевидно, что:
u(Q) = u(P) + du ,
u(r + dr ) = u(r ) + du , ui (r + dr ) = ui (r ) + dui .
Каждую компоненту ui ( r + dr ) деформации u в точке r + dr можно разложить
в ряд Тейлора
3 ⎛∂ u ⎞
i
⎟⎟ ⋅ d xk + K
ui (r + dr ) = ui (r ) + ∑ ⎜⎜
k =1 ⎝ ∂ x k ⎠
(2.1.1)
Ограничимся при разложении лишь вторым, линейным членом разложения.
Если деформация тела во всех его точках удовлетворяет соотношению (2.1.1),
то такое тело называют телом однородной линейной деформации. Учет
нелинейных членов разложения в уравнении (2.1.1) требуется только при
больших деформациях. В дальнейшем рассматриваются лишь малые
деформации, когда деформацию можно рассматривать как упругую, при которой
после снятия внешних сил тело полностью восстанавливает свою форму и
объём.
Если условиться, что по дважды повторяющемуся индексу производится
суммирование, то (2.1.1) можно записать в виде
ui (r + dr ) = ui (r ) +
∂ui
d xk ≡ ui (r ) + d ui .
∂xk
Следовательно, можно записать:
dui =
∂ui
dxk ≡ Aik dxk ,
∂xk
Aik =
∂ui
.
∂xk
(2.1.2)
Величина Aik есть тензор второго ранга третьей мерности. Тензор Aik
называют тензором относительной деформации. Его компоненты являются в
общем случае функциями координат и времени, т. е. Aik = Aik (r, t ) . Будем
предполагать, что компоненты тензора относительной деформации малы по
14
сравнению с единицей из-за малости деформации или из-за малости
промежутка времени деформирования, т. е. Aik << 1.
В тензоре Aik можно выделить симметричную и антисимметричную
часть следующими слагаемыми:
Aik =
(
)
1
1
Aik + Aki + ( Aik − Aki ) = ε ik + ϕ ik .
2
2
(2.1.3)
Симметричную часть εik тензора Aik называют тензором деформации,
который равен
1 ⎛ ∂ ui ∂ u k ⎞
⎟ , ε ik = ε ki .
+
ε ik = ⎜⎜
2 ⎝ ∂ x k ∂ xi ⎟⎠
(2.1.4)
Антисимметричную часть ϕik тензора Aik называют тензором поворота:
1 ⎛ ∂ ui ∂ uk ⎞
−
⎟ , ϕ ik = −ϕ ki .
2 ⎝ ∂ xk ∂ xi ⎠
ϕ ik = ⎜
(2.1.5)
Таким образом, изменение i-ой компоненты смещения в точке Q равно:
dui = (ε ik + ϕ ik ) dxk .
2.2. ТЕНЗОР ПОВОРОТА
Рассмотрим физический смысл компонент тензора поворота ϕik.
Предположим, что все компоненты тензора деформаций ε ik равны 0, т. е. ε ik = 0.
Тогда в соответствии с (2.1.2, 3) имеем
dui = ϕ ik dxk .
(2.2.1)
Поскольку в соответствии с определением (2.1.5)
ϕ11 = ϕ 22 = ϕ 33 = 0 , то компоненты тензора ϕ ik образуют матрицу:
0
ϕ ik = ϕ 21
ϕ 31
компоненты
ϕ12 ϕ13
0
ϕ 23 ,
ϕ 32 0
(2.2.2)
причем ϕ12 = −ϕ 21 , ϕ13 = −ϕ 31 , ϕ 23 = −ϕ 32 . Таким образом, имеются лишь три
независимых компоненты тензора поворота ϕ ik . Введем обозначения
ϕ12 = −ϕ 3 , ϕ13 = ϕ 2 , ϕ 23 = −ϕ1 . В результате матрица (2.2.2) имеет вид
ϕ ik
⎡ 0
= ⎢ ϕ3
⎢
⎢⎣ − ϕ 2
−ϕ3
0
ϕ1
ϕ2 ⎤
− ϕ1 ⎥ .
⎥
0 ⎥⎦
Тогда компоненты вектора du согласно (2.2.1) можно записать в виде:
15
du1 = −ϕ 3 dx2 + ϕ 2 dx3 ,
du2 = ϕ3dx1 − ϕ1dx3 ,
du3 = −ϕ 2 dx1 + ϕ1dx2 .
Данные соотношения определяют компоненты вектора du = (du1 , du 2 , du3 ),
который равен векторному произведению векторов ϕ и dr :
⎡ i
du = du1·i + du2·j + du3 k = ⎢ ϕ 1
⎢
⎢⎣dx1
j
ϕ2
dx 2
k ⎤
ϕ 3 ⎥ = [ϕ×dr] .
⎥
dx 3 ⎥⎦
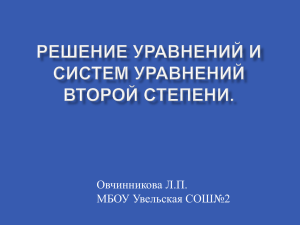
Вектор du в случае εik = 0 представляет собой вектор малого поворота
элемента объёма (точки Q), находящегося на расстоянии dr от точки P, на
некоторый малый угол ϕ (рис. 2.2).
x3
ϕ
ϕ
P
r
du
Q
dr
r+dr
х2
х1
Рис. 2.2
Таким образом, компоненты тензора поворота ϕik определяют поворот
дифференциальной окрестности первого порядка (точки Q) около точки P как
абсолютно твёрдого тела на некоторый малый угол ϕ, т. е. антисимметричная
часть ϕik тензора относительной деформации Aik описывает не деформацию
элемента тела в данной точке в собственном смысле этого слова, а лишь его
поворот как поворот элемента абсолютно твёрдого тела.
Вспомним определение компонент ротора некоторого вектора u:
⎡ i
⎢ ∂
rot u = ⎢
⎢ ∂x1
⎢⎣ u1
j
∂
∂x2
u2
k ⎤
∂ ⎥
⎥.
∂x3 ⎥
u3 ⎥⎦
(2.2.5)
16
Но согласно определения (2.1.5) для независимых компонент тензора поворота ϕik и
уравнения (2.2.5) для компонент rot u можно записать следующие соотношения:
1 ⎛ ∂u
∂u ⎞
1
ϕ12 = ⎜⎜ 1 − 2 ⎟⎟ = −ϕ 3 = − rot 3u,
2 ⎝ ∂x2 ∂x1 ⎠
2
1 ⎛ ∂u
∂u ⎞
1
ϕ 23 = ⎜⎜ 2 − 3 ⎟⎟ = −ϕ1 = − rot1u,
2 ⎝ ∂x3 ∂x2 ⎠
2
(2.2.6)
1 ⎛ ∂u3 ∂u1 ⎞
1
⎟⎟ = −ϕ 2 = − rot 2u.
−
2 ⎝ ∂x1 ∂x3 ⎠
2
ϕ 31 = ⎜⎜
Очевидно, что уравнения (2.2.6) определяют компоненты вектора ϕ
равенством
1
(2.2.7)
ϕ = rot u .
2
Следовательно, компоненты тензора поворота представляют собой компоненты
ротора смещения.
2.3. ТЕНЗОР ДЕФОРМАЦИИ
Тензор деформации по определению (2.1.4) равен
1 ⎛ ∂u
∂u ⎞
ε ik = ⎜⎜ i + k ⎟⎟ , ε ik = ε ki .
2 ⎝ ∂xk ∂xi ⎠
Матрица компонент тензора деформаций имеет вид
ε ik
⎡ε 11 ε 12
= ⎢ε 21 ε 22
⎢
⎢⎣ε 31 ε 32
ε 13 ⎤
ε 23 ⎥ .
⎥
ε 33 ⎥⎦
Как всякий симметричный тензор εik можно привести к главным осям, в
которых матрица компонент тензора εik будет иметь вид
ε ik
⎡ ε 110
0
⎢
0
= ⎢ 0 ε 22
⎢⎣ 0
0
⎤
⎥
⎥.
0
ε 33 ⎥⎦
0
0
o
o
, ε o22 , ε 33
Диагональные компоненты тензора деформаций в главных осях ε 11
называют главными значениями тензора εik и они описывают главные
деформации среды.
Если все компоненты тензора поворота равны нулю, т. е. ϕik = 0, то
согласно (2.1.2, 3):
dui = ε ik ⋅ dxk .
(2.3.1)
17
Обозначим проекции приращения вектора dr в главных осях через
d xi (i = 1, 2, 3) . Тогда деформации в главных осях можно записать в виде
o
du1o = ε 11o ⋅ dx1o , du 2o = ε 22o ⋅ dx2o , du3o = ε 33o ⋅ dx3o .
(2.3.2)
Здесь duio есть деформация отрезка dxio . Все деформации направлены по
главным осям. В силу линейности деформаций деформации любого отрезка (не
обязательно бесконечно малого) в главных осях будут иметь вид
du1o = ε 11o ⋅ Δx1o .
(2.3.3)
Из (2.3.3) видно, что главные деформации описывают локальные растяжение
(+) или сжатие (-) элемента объёма в направлении главных осей деформации.
Растяжение или сжатие по трем взаимно перпендикулярным направлениям
называют чистой деформацией.
Таким образом, если все компоненты тензора поворота равны нулю
(ϕik = 0), то всегда в элементе объёма, лежащем около точки P, можно
определить главные оси деформации, в которых этот элемент объёма
испытывает чистую деформацию. Если же компоненты тензора ϕik не равны
нулю, то они описывают поворот этих главных осей вокруг точки P на
некоторый малый угол. Следовательно, деформация некоторого элемента
объёма тела в общем случае сводится к его чистой деформации (растяжению
или сжатию по его главным осям деформации) и повороту на малый угол
главных осей деформации; причем этот поворот происходит как поворот
абсолютно твердого тела.
2.3.1. Изменение объёма тела при деформации
Поскольку компоненты тензора поворота ϕik описывают поворот
элемента объёма как абсолютно твердого тела, то они не могут влиять на
изменение его объёма при деформации. Рассмотрим чистую деформацию в
главных осях, которая единственно может привести к изменению объема
рассматриваемого элемента.
Пусть до деформации изменение элемента объёма в главных осях
определяется выражением
ΔV = Δ x1o ⋅ Δ x2o ⋅ Δ x3o .
o
После деформации рёбра элемента объёма получают приращения и их величину
можно определить как
Δ xio = Δ xio + duio .
Принимая во внимание (2.3.3), элемент объёма после деформации можно
записать в форме
18
ΔV ′ = (1 + ε 11o )(1 + ε o22 )(1 + ε o33 ) ⋅ Δ x1o ⋅ Δ x2o ⋅ Δ x3o .
o
o
Поскольку рассматриваются только малые деформации, т. е. ε 11
, ε o22 , ε o33 << 1,
то, пренебрегая величинами более высокого порядка малости, получим
выражение для ΔVo′ в виде
ΔV ′ = (1 + ε 11o + ε 22o + ε 33o ) ⋅ ΔV .
o
o
Тогда относительное изменение объёма при чистой деформации определяется
соотношением
ΔV ' − ΔV
o
o = εo + εo + εo .
(2.3.4)
11
22
33
ΔV
o
Из тензорного анализа известно, что сумма диагональных элементов
тензора является линейным инвариантом при его преобразованиях. Поэтому,
используя (2.3.4), можно записать
ε11o + ε 22o + ε 33o = ε11 + ε 22 + ε 33 = Spur(ε ik ) = inv .
Следовательно, для нахождения относительного изменения элемента объёма
тела при его деформации нет необходимости приводить тензор деформации εik к
его главным осям. Сумма его диагональных элементов в любых осях определяет
относительное изменение элемента объёма.
Соотношение (2.3.4) можно записать и в следующем виде:
ΔV ′ − Δ V
3
dV
∂u ∂u ∂u
o
o = δV = ∑
ε ii = 1 + 2 + 3 = diυ u ≡
.
i =1
V
∂x1 ∂x2 ∂x3
ΔV
ΔV
o
(2.3.5)
o
Таким образом, относительное изменение объёма при деформации
определяется дивергенцией вектора деформаций. Следует заметить также, что
сдвиг, описываемый недиагональными элементами тензора деформаций εik (в
отличие от диагональных), не приводит к изменению объёма, а описывает лишь
изменение формы рассматриваемого элемента объёма.
2.3.2. Геометрические свойства линейных деформаций
Отметим следующие геометрические свойства линейных деформаций.
1. Точки элемента объёма тела, находящиеся до деформации в одной
плоскости, после линейной деформации также расположатся в некоторой
плоскости.
Действительно, запишем уравнение плоскости в главных осях
ax1o + bx2o + cx3o + d = 0 .
19
После деформации новые координаты точек плоскости будут связаны со
старыми координатами в соответствии с (2.3.3) соотношениями:
′
′
′
x10 = x10 + ε 110 x10 , x20 = (1 + ε 220 ) x20 , x30 = (1 + ε 330 ) x30 .
Тогда координаты точек после деформации удовлетворяют уравнению вида
a
b
c
o′
o′
o′
x
+
x
+
o 1
o 2
o x3 + d = 0
1+ ε11
1+ ε 22
1+ ε33
или
a1 x1o′ + b2 x2o′ + c3 x3o′ + d = 0 .
Новые координаты точек после деформации удовлетворяют уравнению
некоторой другой плоскости. Этот результат справедлив и в любой системе
координат в общем случае деформации, а не обязательно только для чистой
деформации, которая рассмотрена для доказательства. Действительно, в общем
случае деформация элемента объёма состоит из растяжения или сжатия по
главным осям и повороту этих осей на некоторый малый угол как абсолютно
твёрдого тела, определяемый компонентами тензора поворота. Поворот же
элемента объёма как абсолютно твёрдого тела, содержащего некоторую
плоскость, не может сместить точки тела из этой плоскости.
2. Точки, лежащие на одной прямой в элементе объёма до деформации,
после деформации также будут лежать на некоторой прямой. Это следует из
первого свойства, т.к. прямая является геометрическим местом точек
пересечения двух плоскостей. Следовательно, влияние линейной деформации
на материальные точки, расположенные на некотором отрезке прямой,
проявляются, во-первых, в повороте прямой на некоторый малый угол и, вовторых, в растяжении или сжатии этого отрезка.
3. Две параллельные плоскости в элементе объёма до деформации
остаются параллельными и после его деформации.
Действительно, пусть имеем две параллельные плоскости в элементе
объёма. В главных осях уравнения этих плоскостей имеют вид:
a x1o + b x2o + c x3o + d = 0,
A x1o + B x2o + C x3o + D = 0.
Плоскости параллельны, если выполняется соотношение:
a b c
= = .
A B C
После деформации плоскости будут описываться уравнениями следующего
вида:
20
a
b
c
o′
o′
o′
o x1 +
o x2 +
o x3 + d = 0 ,
1+ ε11
1+ ε 22
1+ ε33
A o′
B o′
C o′
o x1 +
o x2 +
o x3 + D = 0 .
1+ ε11
1+ ε 22
1+ ε33
Как видно, условие параллельности плоскостей выполняется и после
деформации.
4. Из условия сохранения параллельности плоскостей при деформации
вытекает условие параллельности двух прямых, т. е. две параллельные прямые,
проведенные в элементе деформируемого объёма, останутся параллельными и
после линейной деформации.
Повторяя рассуждения пункта 1, можно утверждать, что свойства
параллельности прямых и плоскостей сохраняются и при произвольной
линейной деформации.
2.3.3. Эллипсоид деформации
Рассмотрим в элементе объёма сферу единичного радиуса с центром в
начале координат главных осей. Уравнение сферы имеет вид
x1o + x2o + x3o = 1.
2
2
2
После линейной деформации координаты точек на поверхности сферы, как и в
предыдущем параграфе, определяются соотношениями
x1o′ = ( 1 + ε 110 ) x1o , x2o′ = ( 1 + ε 22o )x2o , x3o′ = ( 1 + ε 33o )x3o .
Тогда уравнение сферы после деформации имеет вид
(xo′ o)
2
(xo′ o)
2
1
+
(xo′ )
2
2
+
3
(1 + ε ) (1 + ε ) (1 + ε o )
11
2
22
2
= 1.
2
33
Из данного уравнения следует, что при линейной деформации уравнение
сферы переходит в уравнение эллипсоида, если все главные значения тензора
деформаций различны. Этот результат справедлив не только в главных осях, но
и при произвольной линейной деформации, т.к. поворот элемента объёма как
абсолютно твердого тела на некоторый угол не изменяет формы поверхности,
расположенной внутри этого элемента объема. Если ε 11o = ε 22o = ε 33o (деформация
однородна), то сфера переходит в сферу большего или меньшего радиуса. Если
ε 11o = ε 22o ≠ ε 33o , то сфера переходит в эллипсоид вращения.
21
2.4. ТЕМПЕРАТУРНАЯ ДЕФОРМАЦИЯ
Расстояние между двумя точками элемента объёма тела может
изменяться не только с приложением к телу внешних сил, но и в результате
изменения его температуры. В пределах элемента объёма тела температура
предполагается постоянной. Если в начальный момент времени температура
элемента объёма равнялась To , то после нагревания или охлаждения тела пусть
она будет равна T . Изменение температуры равно ΔT = T - To. При этом
предполагается, что внутри элемента не возникает каких-либо напряжений. В
общем случае деформации элемента объёма вследствие изменения его
температуры пропорциональны изменению температуры, и поэтому можно
записать:
duiT = ε ikT ⋅ dxk , ε ikT = α ik ΔT .
(2.4.1)
В этом соотношении тензор деформаций ε ikT называют тензором теплового
расширения, а величины α ik называют коэффициентами линейного теплового
расширения. В общем случае коэффициенты α ik образуют диагональный
тензор 2-го ранга. Так как рассматриваемый элемент объёма достаточно мал, то
его можно считать однородным и температурные деформации имеют место
только в главных осях. Следовательно, температурная деформация элемента
объёма тела происходит без его поворота и заключается в расширении или
сжатии по трём взаимно перпендикулярным главным осям деформации.
В главных осях матрица компонент тензора α ik имеет вид
α ik
⎡α 11o
0
0 ⎤
⎢
⎥
o
= ⎢ 0 α 22
0 ⎥.
o⎥
⎢⎣ 0
0 α 33
⎦
Нетрудно видеть по аналогии с предыдущим, что при температурной
деформации сфера деформируется в эллипсоид, имеющий уравнение
(xoo′ )
2
1
(1+ α
11
(xoo′ )
2
ΔT )
2
+
(1+ α
2
22
(xoo′ )
2
ΔT )
2
+
3
(1+ α
33
ΔT )
2
= 1.
o
Если α 11
= α o22 = α o33 , то сфера деформируется в сферу большего или меньшего
o
= α o22 ≠ α o33 , то сфера деформируется в эллипсоид вращения.
радиуса. Если α 11
o
= α o22 = α o33 = α , то тело изотропно и характеризуется лишь
Если α 11
одним коэффициентом линейного теплового расширения α. Тогда тензор
теплового расширения можно записать в виде
ε ikT = α δ ik ΔT .
(2.4.2)
22
Здесь δ ik – единичный симметричный тензор или символ Кронекера. В этом
случае из (2.4.1) следует знакомый из общего курса физики результат:
duiT = ε ikT dxk = α ik ΔTdxk = αδ ik ΔTdxk = αΔTdxi .
Так как duiT есть приращение отрезка dxi вследствие температурных
деформаций, то в силу линейности и изотропности деформаций для
приращения любого отрезка l при однородном нагревании тела можно записать
известную формулу
Δl = α ΔT l.
Относительное изменение объёма при температурной деформации для
изотропного тела по аналогии с (2.3.5) имеет вид
δV
ΔV
3
3
i =1
i =1
= ∑ ε iiT = α ΔT ∑ δ ii = 3α ΔT .
(2.4.4)
Последнее соотношение для малых температурных деформаций можно
записать
в
дифференциальной
форме,
если
полагать,
что
ΔV ≈ V , δV ≈ ∂V , ΔT ≈ ∂T :
1 ⎛ ∂V
⎜
V ⎝ ∂T
⎞
⎟ = 3α .
⎠P
(2.4.5)
Величину 3α называют коэффициентом объёмного расширения тела.
Производная в последней формуле взята при постоянном давлении, т.к. при
однородном нагревании тела в отсутствие внешних сил внутри него не
возникает каких-либо напряжений. Эту величину называют изобарной
сжимаемостью среды.
2.5. ТЕОРЕМА КОШИ-ГЕЛЬМГОЛЬЦА
При рассмотрении деформаций предполагалось, что тело в целом
находится в состоянии покоя. Если же тело под действием внешних сил
перемещается в пространстве, то будет перемещается и точка P как полюс
(рис. 2.1). Поэтому, рассматривая смещение произвольного элемента объёма
тела, в общем случае можно сформулировать теорему Коши-Гельмгольца.
Общее перемещение некоторой точки Q элемента объёма
деформируемого тела, содержащего точку P, может быть представлено в
виде суммы:
• поступательного перемещения точки P как полюса;
• вращения точки Q вместе с элементом объёма как абсолютно твердого
тела вокруг точки P на малый угол, определяемый вектором поворота ϕ;
23
• собственно деформационного перемещения вследствие сжатия или
растяжения по трем взаимно перпендикулярным осям (главным осям
деформации).
Математически теорему можно записать следующим образом:
u(Q) = u(P) + [ ϕ×dr ] + duдеф ,
u(r+dr) = u(r) + [ ϕ×dr ] + duдеф ,
ui (r+dr) = ui(r) + εiklϕkdxl + εikdxk .
(2.5.1)
Здесь εikl – символ Леви-Чивита. Из (2.5.1) видно, что по сравнению с
механикой абсолютно твердого тела в механике деформируемого тела к
смещению точки добавляется еще одно слагаемое, связанное с собственно
деформацией среды.
Если температура тела не остается постоянной, то к правой части (2.5.1)
необходимо добавить еще одно слагаемое, определяющее температурную
деформацию согласно (2.4.1). Тогда общее перемещение точки Q равно
ui (r + dr ) = ui (r ) + ε iklϕ k dxl + ε ik dxk + α ik ΔT dxk .
(2.5.2)
24
3. ТЕНЗОР НАПРЯЖЕНИЙ
3.1. СИЛЫ МАССОВЫЕ, ОБЪЁМНЫЕ И ПОВЕРХНОСТНЫЕ
Под влиянием внешних сил тело деформируется. В результате
деформаций в теле возникают напряжения. Все силы, действующие на элемент
объёма деформируемого тела, разделяют на две категории: силы массовые или
объёмные и силы поверхностные.
3.1.1. Массовые силы
Массовые силы – это силы, пропорциональные массе элемента объёма
тела. Если масса элемента объема тела ΔV равна Δm, то массовая сила ΔF,
действующая на этот элемент объёма, равна
ΔF = f m ⋅ Δm .
Здесь fm – напряжённость (плотность) массовой силы или массовая сила,
действующая на единицу массы. Если ввести понятие массовой плотности
вещества
Δm
ρ = lim
,
ΔV → 0 ΔV
то в пределах однородного элемента объёма можно записать:
Δm = ρ ΔV , ΔF = ρ f m ΔV .
Тогда по аналогии произведение ρ f m = f v можно назвать напряжённостью
(плотностью) объёмной силы, т. е. силой, действующей на единицу объёма.
Типичными массовыми или объёмными силами являются: сила тяжести,
Лоренцева сила, сила Кориолиса и т.п.
3.1.2. Силы поверхностные
В МСС по сравнению с механикой точки и абсолютно твердого тела
необходимо ввести новое понятие – понятие о поверхностных силах. Если
внутри деформируемого тела мысленно выделить некоторый объём, то на его
поверхность со стороны остальной части будут действовать некоторые силы
вследствие деформации, т.е. смещения одних участков тела по отношению к
другим. Взаимодействие между соседними элементами тела осуществляется
при помощи короткодействующих молекулярных сил (радиус действия
молекулярных сил порядка размеров атомов или молекул). Поэтому передача
силового взаимодействия от одного элемента объёма к соседнему
осуществляется практически лишь через очень тонкий (порядка нескольких
25
ангстрем) поверхностный слой, который можно считать разделяющей
поверхностью. Тогда не рассматриваемая или мысленно отбрасываемая часть
объёма тела действует на выделенный элемент объёма только через его
поверхность. Это силовое воздействие на выделенный элемент объёма может
быть заменено некоторыми поверхностными силами.
Таким образом, поверхностные силы – это внутренние силы в
деформируемом теле, которые возникают между соседними частями тела (на
граничных поверхностях) при деформации или движении среды (например,
сила давления, вязкие напряжения и т.д.). Если тело не деформировано, но
однородно нагрето, то эти внутренние силы отсутствуют, и все части его
находятся в механическом и термодинамическом равновесии.
Существенное различие между объёмными и поверхностными силами
заключается в том, что если объёмные (или массовые) силы могут зависеть
лишь от координат и времени f = f (r, t ) , то поверхностные силы зависят еще и
от ориентации площадки, на которую они действуют. Эта зависимость в общем
случае является тензорной.
x3
dS
n
(n)
-dF
dF(n)
x2
x1
Рис. 3.1
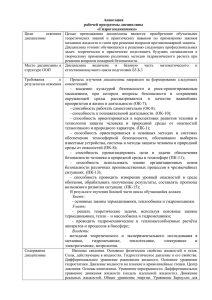
Рассмотрим некоторый выделенный объём тела (рис. 3.1). Действие
остальной части тела на этот выделенный объём можно заменить некоторыми
силами, действующими на его поверхность. Выделим на этой поверхности
элемент площади dS. Пусть n есть нормальный единичный вектор к
элементарной площадке dS. Единичный вектор n будем считать
положительным, если он направлен вне выделенного объёма тела.
Пусть далее на этот элемент поверхности действует поверхностная сила
(n)
dF . Причем сила необязательно направлена по нормали к элементу
26
поверхности. Значок (n) указывает на ориентацию площадки в пространстве.
Тогда можно записать
dF(n) = σ(n)⋅dS ,
dF(n) = - dF(-n) .
(3.1.1)
(n)
Здесь σ
есть поверхностная сила, действующая на единицу площади.
(n)
по аналогии с объёмными силами можно назвать
Величину σ
напряжённостью (плотностью) поверхностных сил или просто напряжением.
3.1.3. Тензор напряжений
Значение напряжения σ(n) в данной точке элемента поверхности можно
(n )
выразить через напряжения σ i , которые на плоскости перпендикулярны
координатным осям в декартовой системе координат.
x3
C
σ (n
1
)
dS1
σ
n
( n2 )
σ (n)
dS
dS2 O
dS3
A
x1
B
x2
σ (n3 )
(n )
Рис. 3.2
Рассмотрим тетраэдр ABCО (рис. 3.2) объёмом dV, представляющий
некоторый элемент деформируемого тела. Результат рассмотрения не должен
зависеть от формы выделенного элемента объёма тела и тетраэдр
рассматривается только для простоты доказательства.
Обозначим силы, действующие на каждую из
площадок dSi, в
( ni )
соответствии с (3.1.1) через σ . Далее составим уравнение баланса сил,
действующих на тетраэдр ABCO:
dF = dFV + dFS .
(3.1.2)
Здесь сила dF определяется согласно второму закону Ньютона через
произведение массы тетраэдра на ускорение движения, т.е. dF = ρ dV ⋅ du / dt ,
где ρ – массовая плотность среды и u – скорость движения элемента объёма dV.
Объемная сила dFV
27
представляет собой силу, равную по определению
dFV = ρ f m dV . Cила dFS есть сила, действующая на всю поверхность тетраэдра
ABCO, и она равна алгебраической сумме произведений соответствующих
(n )
напряжённостей σ i и площадок dSi. Тогда уравнение баланса сил (3.1.2)
можно записать в форме
ρ dV du = ρ fm dV+
dt
σ (n) ⋅dS + σ (n ) ⋅dS1 + σ (n ) ⋅dS2 + σ (n ) ⋅dS3 ,
1
∧
3
2
∧
π
(3.1.3)
< (n, n i ) < π .
2
Здесь ni нормальный единичный вектор, перпендикулярный к площадке dSi .
Очевидно, что в (3.1.3) элементы объёма dV и площади dS
пропорциональны кубу и квадрату линейного размера. Поэтому, если стягивать
тетраэдр в точку, то можно пренебречь в (3.1.3) слагаемыми с dV. Тогда
(n)
напряженность σ равна
dS i = dS ⋅ cos (n, n i ) = − dS ⋅ ni ,
σ (n) = σ (n ) ⋅⋅n1 + σ (n ) ⋅n2 + σ (n ) ⋅n3 .
1
2
3
(3.1.4)
Проекцию этой силы на ось i можно записать в виде
σ i(n) = σ ik⋅nk .
(3.1.5)
Трёхмерный тензор второго ранга σik называют тензором напряжений.
Равенство (3.1.5) позволяет определить напряжение, действующее в
направлении оси xi на произвольно ориентированную в теле единичную
площадку, через напряжения, действующие на три перпендикулярные
координатным осям единичные площадки.
Из вывода тензора напряжений следует, что любая компонента тензора
напряжений σik представляет собой силу, действующую в направлении
координатной оси xi на единичную площадку, перпендикулярную оси xk.
На рис. 3.3 изображены все компоненты тензора напряжений σik,
действующие на три взаимно перпендикулярные грани куба единичной
площади. Компоненты тензора σik при i = k называют нормальными
напряжениями, а компоненты тензора σik при i ≠ k называют касательными
(сдвиговыми) напряжениями. Далее будет показано (п. 6.5), что тензор σik
является симметричным тензором (т. е. σik = σki); следовательно, он имеет 6
независимых компонент. Как симметричный тензор он может быть приведен к
главным осям, в которых матрица компонент тензора напряжений имеет вид:
28
σ33
х3
σ23
σ13
0 ⎤
⎥
0 ⎥.
22
⎥
o
0 σ 33 ⎥⎦
Если σ11° = σ22° = σ33° = − P , то говорят,
что
элемент
объёма
испытывает
всестороннее и равномерное сжатие, что
σ32
σ31
σ11
⎡σ o
⎢ 11
o
σ ik = ⎢ 0
⎢
⎢⎣ 0
σ22
σ12
σ21
х1
х2
Рис. 3.3
0
σo
имеет место в газах, жидкостях и изотропных твёрдых телах. В этом случае
тензор напряжений можно записать в виде:
σik = − Р ⋅ δik .
P = −(σ 11 + σ 22 + σ 33 ) / 3 .
(3.1.6)
3.2. РЕЗУЛЬТИРУЮЩАЯ СИЛА, ДЕЙСТВУЮЩАЯ НА ЕДИНИЦУ
ОБЪЁМА ТЕЛА
Рассмотрим некоторый выделенный объём тела V. Силы внутренних
напряжений внутри него не могут дать никакой результирующей силы, т.к. по
закону равенства действия и противодействия силовые взаимодействия
различных внутренних частей выделенного объёма взаимно компенсируются.
Следовательно, результирующая сила может быть вызвана только силами,
действующими на поверхность выделенного объёма со стороны ”отброшенной“
части тела. Пусть F есть сила, действующая на единицу объёма. Тогда на
элемент объёма dV действует сила FdV. Чтобы выделенный элемент объёма
находился в равновесии, необходимо, чтобы результирующая сила,
действующая на объём, была равна результирующей поверхностной силе, т. е.
∫ FdV = ∫ dF = ∫ σ dS ,
(n)
(n)
S
(V )
(S )
(S )
∫ F dV = ∫ σ dS = ∫ σ n dS .
(n)
i
(V )
ik
i
(S )
k
(3.2.1)
(S )
В вышеприведённых формулах интегрирование в правой части ведётся по
поверхности S выделенного объема V, nk – проекция на ось k единичного
нормального к элементарной площадке dS вектора n. Произведение nk dS
можно записать в виде dSk , если элементарной площадке приписывать
направление нормали к ней. Тогда из (3.2.1) следует
∫ Fi dV = ∫ σ ik dS k .
(V )
(3.2.2)
(S )
По теореме Гаусса-Остроградского интеграл по замкнутой поверхности от
некоторого вектора может быть преобразован в интеграл по объёму,
охватываемому этой поверхностью, от дивергенции этого вектора.
29
Действительно, для вектора а теорема Гаусса-Остроградского определяет
интегральное соотношение вида
∂ak
∫ a ⋅ dS = ∫ a dS = ∫ diυ a dV ≡ ∫ ∂x dV .
k
(S )
k
(S )
(V )
(V )
(3.2.2 а)
k
Для тензора Aik по аналогии можно записать
∂Aik
∫ A dS = ∫ ∂x dV ,
ik
k
(S )
(V )
(3.2.2 б)
k
Аналог этой теоремы для интеграла по замкнутой поверхности от тензора
второго ранга приводит к результату
∂σ ik
∫ F dV = ∫ σ dS = ∫ ∂x dV .
i
(V )
ik
(S )
k
(V )
(3.2.3)
k
Следовательно, результирующая сила, которая действует на единицу объёма
деформируемого тела, определяется формулой
Fi =
∂σ ik
.
∂xk
(3.2.4)
Таким образом, зная зависимость компонент тензора напряжений от
координат и времени, по формуле (3.2.4) можно вычислить силу, действующую
на единицу объёма или элемент объёма в любой точке деформируемого тела в
любой момент времени, и, следовательно, составить уравнения движения этих
элементов, а значит, и всего тела.
30
4. ТЕРМОДИНАМИКА ДЕФОРМИРОВАНИЯ
4.1. РАБОТА СИЛ ВНУТРЕННИХ НАПРЯЖЕНИЙ
Рассмотрим некоторое деформируемое тело. Определим работу, которая
совершается силами внутренних напряжений при деформировании тела. Пусть
dAV есть работа, совершаемая силами внутренних напряжений в единице
объёма тела. Тогда, умножая скалярно силу F на элементарное перемещение du,
получим
∂σ
dAV = F ⋅ du = Fi dui = ik dui .
(4.1.1)
∂xk
Работа, производимая силами
некоторого объёма тела V, равна
внутренних
напряжений
∂σ ik
dui dV .
( V ) ∂x
k
AV = ∫ dAV dV = ∫
(V )
внутри
(4.1.2)
Интеграл в правой части можно записать в следующем виде:
⎛
⎞
∂
(σ ik dui )dV − ∫ σ ik ⎜⎜ ∂ dui ⎟⎟dV .
( V ) ∂x
(V )
⎝ ∂xk
⎠
k
AV = ∫
Применяя теорему Гаусса-Остроградского к первому интегралу, получим
⎛∂u ⎞
AV = ∫ (σ ik dui ) dS k − ∫ σ ik d ⎜⎜ i ⎟⎟dV .
(S)
(V )
⎝ ∂xk ⎠
Если рассматривать очень большой объём (в пределе бесконечный), можно
предположить, что на границах тело не деформируется. Поэтому можно
считать, что первый интеграл в этом выражении равен нулю. Тогда работа сил
внутренних напряжений в объеме V равна
⎛ ∂u
AV = − ∫ σ ik ⎜⎜ d i
(V )
⎝ ∂xk
⎞
⎟⎟ dV .
⎠
(4.1.3)
Далее рассмотрим скалярное произведение симметричного тензора Aik
на произвольный тензор Bik, который можно разложить на симметричную и
антисимметричную часть, и преобразуем его:
1
1
1
1
Aik ⋅ Bik = Aik ⋅ (Bik + Bki ) + Aik ⋅ (Bik − Bki ) = Aik ⋅ (Bik + Bki ) + ( Aik ⋅ Bik − Aik ⋅ Bki ) .
2
2
2
2
31
Поскольку здесь значки i и k немые (повторяются дважды), их в любом
слагаемом можно поменять местами. Тогда получим
Aik ⋅ Bik =
1
1
Aik ⋅ (Bik + Bki ) + ( Aik ⋅ Bik − Aki ⋅ Bik ).
2
2
Но так как тензор Aik по условию тензор симметричный, т. е. Aik = Aki , то
выражение во вторых скобках равно нулю. Поэтому, используя симметрию
тензора напряжений, подынтегральное выражение в (4.1.3) можно записать в
виде
⎡ 1 ⎛ ∂u ∂u ⎞⎤
AV = − ∫ σ ik ⋅ d ⎢ ⎜⎜ i + k ⎟⎟⎥ dV ≡ − ∫ σ ik ⋅dε ik dV .
(V )
(V )
⎣ 2 ⎝ ∂xk ∂xi ⎠⎦
(4.1.4)
Таким образом, из сравнения (4.1.2) и (4.1.4) следует, что работа,
совершаемая внутренними напряжениями в единице объёма деформируемого
тела, равна
dAV = − σ ik ⋅ dε ik .
(4.1.5)
4.2. ОСНОВНОЕ ТЕРМОДИНАМИЧЕСКОЕ РАВЕНСТВО
Если после прекращения действия внешних сил тело полностью
возвращается в исходное недеформированное состояние, то возникающие при
этом деформации называют упругими деформациями. Если после прекращения
действия внешних сил тело не возвращается в исходное состояние, то такие
деформации называют неупругими или пластическими деформациями. При
пластических деформациях после прекращения действия внешних сил
остаются некоторые остаточные деформации, и состояние тела после
деформации может существенно отличаться от его состояния до деформации.
Малые деформации при кратковременном действии внешних сил всегда
являются упругими.
Если упругая деформация совершается достаточно медленно, то в
каждый момент времени в элементе объёма деформируемого тела успевает
установиться состояние термодинамического равновесия, соответствующее тем
внешним условиям, в которых тело в данный момент находится. Такой процесс
называют термодинамически обратимым. Тогда из первого начала
термодинамики следует, что приращение внутренней энергии единицы объема
тела dEвн равно разности полученного извне данной единицей объёма тепла dQ
и производимой силами внутренних напряжений работы dAV , т. е.
dE‰’ = dQV − dAV = dQV + σ ik dε ik .
(4.2.1)
32
Условимся все величины относить к единице объёма недеформируемого тела,
т.к. объём при деформировании тела может измениться. Уравнение (4.2.1)
является основным термодинамическим равенством для деформируемых тел.
При обратимом процессе количество тепла равно dQV = TdSV , где Т –
температура, а SV – энтропия единицы объёма недеформированного тела. Тогда
соотношение (4.2.1) принимает вид
dEвн = TdSV + σ ik dε ik .
(4.2.2)
Нетрудно видеть, что равенство (4.2.2) соответствует аналогичному равенству,
рассматриваемому в традиционной термодинамике. Действительно, при
всестороннем равномерном сжатии (газы, жидкости) тензор напряжений
согласно (3.1.6) равен σ ik = − P ⋅ δ ik . Тогда равенство (4.2.2) запишется в виде
dE‰’ = TdSV − Pδ ik dε ik = TdSV − Pdε ii = TdSV − Pd
ΔV
.
V
Здесь использовано свойство тензора деформаций, что при равномерном сжатии
сумма его диагональных элементов равна относительному изменению объёма.
Если рассматривать малую деформацию единицы объёма тела и считать, что в
этом случае d (ΔV ) ≈ dV , то из предыдущего равенства следует известное
термодинамическое равенство вида:
dEвн = TdSV − PdV ,
TdSV = dEвн + PdV .
Одним из основных термодинамических потенциалов
свободная энергия F, которая определяется выражениями:
F = E‰’ − TSV ,
(4.2.2 а)
является
dF = dE‰’ − TdSV − SV dT .
После подстановки вместо dEвн равенства (4.2.2) получим для дифференциала
свободной энергии:
dF = − SV dT + σ ik dε ik .
(4.2.3)
Независимыми переменными в уравнениях (4.2.2) и (4.2.3) являются
величины SV , σik и T. Поэтому компоненты тензора напряжений можно
получить из (4.2.2) и (4.2.3) дифференцированием по компонентам тензора
деформаций εik внутренней энергии Eвн при постоянной энтропии SV или
свободной энергии F при постоянной температуре Т, т. е.
⎛ ∂E ⎞
σ ik = ⎜⎜ вн ⎟⎟
⎝ ∂ε ik ⎠ S
V
∂F ⎞
= ⎛⎜
⎝ ∂ε
ik
⎟ .
⎠T
(4.2.4)
33
5. ЗАКОН ГУКА
5.1 СВОБОДНАЯ ЭНЕРГИЯ ДЕФОРМИРУЕМОГО ТЕЛА
Для решения конкретных задач необходимо иметь связь между
компонентами тензора деформаций εik и компонентами тензора напряжений
σ ik . Для нахождения этой связи воспользуемся общими термодинамическими
соотношениями (4.2.4). Для этого необходимо найти явную зависимость,
например, свободной энергии F от компонент тензора деформации εik. Будем
рассматривать малые деформации при постоянной температуре тела. Тогда
общий вид зависимости свободной энергии от компонент тензора деформации
можно установить путем следующих рассуждений.
В силу малости деформаций (εik << 1) свободную энергию F можно
представить в виде степенного ряда по компонентам тензора деформаций εik.
При малой упругой деформации после прекращения действия всех внешних
сил, вызывающих эту деформацию, тело должно возвращаться в свое исходное
состояние, в котором все компоненты тензора деформации εik и все компоненты
тензора напряжений σ ik равны нулю. Но поскольку согласно (4.2.4)
σ ik = (∂F ∂ε ik )T , то, следовательно, в разложении F по степеням εik должны
отсутствовать линейные по εik слагаемые. В противном случае при
дифференцировании по εik конструируемого выражения получается некоторая
постоянная, что не обеспечит условия σ ik = 0 при εik = 0.
Далее, поскольку свободная энергия F является скалярной величиной, то
каждое слагаемое в искомом разложении F также должно быть скалярной
величиной. Но из компонент симметричного тензора εik можно составить только
три скалярных величины, инвариантных при различных преобразованиях
координат:
*
сумма диагональных элементов εik – линейный инвариант;
*
сумма квадратов всех элементов εik – квадратичный инвариант;
*
определитель матрицы εik – кубический инвариант.
В силу малости деформаций, ограничиваясь лишь квадратичными
членами разложения, свободную энергию можно представить в виде
F = F0 +
λ
2
(ε ) + μ (ε ) .
2
ii
2
ik
(5.1.1)
Здесь для упрощения записи использовано скалярное произведение тензоров
ε ik ⋅ ε ik = (ε ik ) 2 . Величины λ, μ – некоторые коэффициенты пропорциональности,
34
которые называют коэффициентами Ламэ; Fо – свободная энергия единицы
объёма недеформированного тела.
Как отмечалось в п. 2, любую деформацию в произвольной системе
координат можно представить в виде суммы деформации чистого сдвига,
происходящего без изменения объёма, и деформации всестороннего сжатия или
растяжения, приводящего к изменению объёма деформируемого элемента.
Поэтому и тензор деформаций εik можно записать в виде
(
)
ε ik = ε ik − 1 δ ik ε ll + 1 δ ik ε ll .
3
(5.1.2)
3
Действительно, сумма диагональных элементов первого тензора в (5.1.2) равна
нулю, следовательно, он представляет собой тензор сдвига. Второе слагаемое в
(5.1.2) представляет собой тензор всестороннего сжатия или растяжения,
поскольку сумма его диагональных членов равна: ε ll = ΔV V .
С учётом (5.1.2) выражение для свободной энергии удобно привести к
следующему виду:
λ
2
1
1
⎡
⎤
F = F0 + (ε ll ) + μ ⎢(ε ik − ε llδ ik ) + ε llδ ik ⎥ .
2
3
3
⎦
⎣
2
После элементарных преобразований данного выражения получаем:
κ
)
(
2
F = F0 + (ε ll ) + μ ε ik − 1 δ ik ε ll ,
3
2
2
κ
2
=
λ
2
+
μ
3
(5.1.3)
.
Здесь коэффициенты κ и μ называют модулем всестороннего сжатия и
модулем сдвига соответственно.
В состоянии термодинамического равновесия (недеформируемое
состояние) свободная энергия F минимальна. Это значит, что разность F – F0
всегда является положительной величиной, равной нулю только при εik = 0.
Следовательно, правая часть равенства (5.1.3) также должна быть
положительной величиной. Но это может быть лишь тогда, когда оба
коэффициента κ и μ являются каждый в отдельности положительным,
поскольку деформация может быть сдвигом без всестороннего сжатия или
всесторонним сжатием без сдвига. Таким образом, модули κ и μ положительные величины, т. е. κ > 0 и μ > 0.
35
5.2. ЗАКОН ГУКА
Для установления связи между тензором напряжений σ ik и тензором
деформаций εik найдем дифференциал свободной энергии dF, используя
определение (5.1.3):
dF = κε ll dε ii + 2 μ (ε ik − 13 δ ik ε ll )d (ε ik − 13 δ ik ε ll ) ,
(
)
(
dF = κε ll dε ii + 2μ ε ik − 1 δ ik ε ll dε ik ,
3
) (
)
(5.2.1)
поскольку ε ik − 1 δ ik ε ll δ ik = ε kk − 1 δ iiε ll = 0. Но dε ii = δ ik dε ik , поэтому (5.2.1) для
3
3
дифференциала свободной энергии dF можно переписать
1
⎡
⎛
⎞⎤
dF = ⎢κε llδ ik + 2 μ ⎜ ε ik − δ ik ε ll ⎟⎥ dε ik .
3
⎝
⎠⎦
⎣
(5.2.2)
В соответствие с определением (4.2.4) имеем
⎛ ∂F ⎞
⎛
⎞
1
⎟⎟ = κε llδ ik + 2 μ ⎜ ε ik − δ ik ε ll ⎟ .
σ ik = ⎜⎜
3
⎝
⎠
⎝ ∂ε ik ⎠T
(5.2.3)
Выражение (5.2.3) устанавливает линейную связь между компонентами
тензора напряжений σ ik и компонентами тензора деформаций εik при малых
изотермических деформациях.
Возможно получить и обратную связь, т.е. выразить компоненты тензора
деформаций εik через компоненты тензора напряжений σ ik . Для этого найдём
сумму диагональных элементов тензора напряжений σ ik (5.2.3), т. е.
σ ik (i = k ) = σ ii = κδ iiε ll = 3κε ll , ε ll =
После подстановки данного соотношения
преобразований получим зависимость εik( σ ik ):
ε ik =
1
1
σ llδ ik +
9κ
2μ
(σ
ik
в
1
σ ll .
3κ
(5.2.3)
)
− 1 δ ikσ ll .
3
и
элементарных
(5.2.4)
Выражение (5.2.4) называют законом Гука. В форме (5.2.4) получен закон Гука
для малых деформаций, тем не менее он справедлив во всей области упругих
деформаций, поскольку во всей области упругих деформаций сохраняется
линейная зависимость между компонентами тензора деформаций и тензора
напряжений.
Из (5.2.4) можно показать, что относительное изменение объёма при
36
деформации определяется только диагональными
напряжений. Действительно, согласно (2.3.4) имеем
ΔV
1
1
δ iiσ ll = σ ll .
= ε ii =
V
9κ
3κ
элементами
тензора
(5.2.5)
Для газа (жидкости), который может испытывать только всестороннее
равномерное сжатие, тензор напряжений σ ik согласно (3.1.6) равен:
σ = − Pδ , σ = −3P.
ik
ik
ll
(5.2.5 a)
Поэтому при равномерном всестороннем сжатии относительное изменение
объёма газа (жидкости) равно
ΔV
P
=− .
V
κ
(5.2.6)
Если деформации малы, температура среды постоянна, а давление P изменяется
на малую величину ΔP, то соотношение (5.2.6.) можно записать в
дифференциальной форме
1 ⎛ ∂V ⎞
1
(5.2.7)
⎜
⎟ =− .
V ⎝ ∂P ⎠T
κ
Величину 1/k называют коэффициентом всестороннего сжатия или
изотермической сжимаемостью.
Поскольку изменение свободной энергии при деформации единицы
объёма тела ΔF = F - Fо есть однородная квадратичная функция компонент
тензора деформаций εik (5.1.3), то, используя уравнения (5.1.3) и (5.2.2), можно
получить следующее соотношение:
ε ik ⋅
∂ΔF
= 2Δ F .
∂ε ik
Принимая во внимание (4.2.4), имеем
ΔF =
1
σ ik ⋅ ε ik .
2
(5.2.8)
Формула (5.2.8) определяет изменение свободной энергии (”упругой“
энергии) единицы объёма тела при малых изотермических деформациях.
37
5.3. ОДНОРОДНАЯ ДЕФОРМАЦИЯ ТЕЛА
5.3.1. Растяжение стержня
Деформацию тела называют однородной, если все компоненты тензора
деформаций постоянны по всему телу. В качестве примера рассмотрим простое
растяжение стержня вдоль оси x2 (рис. 5.1).
Пусть один из концов стержня
x3
закреплен, а на другой действует
n
некоторая растягивающая вдоль оси
F
x2 сила F = F(0, F2, 0) .Если S –
площадь
поперечного
сечения
x2
стержня,
то
компонента
x1
растягивающей силы F2 = P⋅S, где P –
нормальное к S напряжение.
Рис. 5.1
По условию задачи деформация стержня однородна, поэтому компоненты
тензора напряжений постоянны вдоль всего стержня, и их можно определить из
граничных условий. На боковую поверхность стержня не действуют никакие
внешние силы, следовательно, на ней выполняется условие
σ = σ n = 0.
(n)
i
ik
k
(5.3.1)
Поскольку нормальный единичный вектор n к любой площадке боковой
поверхности стержня перпендикулярен к оси x2 , т. е. имеет лишь компоненты
n1 ≠ 0 и n3 ≠ 0 , а n2 = 0 , то условие (5.3.1) дает следующую систему уравнений
для определения компонент тензора напряжений:
σ 11n1 + σ 12 ⋅ 0 + σ 13 n3 = 0
σ 21n1 + σ 22 ⋅ 0 + σ 23 n3 = 0 .
σ 31n1 + σ 32 ⋅ 0 + σ 33 n3 = 0
(5.3.2)
При произвольных n1 и n3 данная система уравнений непротиворечива (имеет
решение) только тогда, когда все компоненты тензора напряжений, входящие в
неё, равны нулю. Поэтому равны нулю как диагональные σ 11 = σ 33 = 0 , так и
недиагональные компоненты тензора напряжений, т.е. σ 21 = σ 12 = 0 ,
σ 23 = σ 32 = 0 . Следовательно, единственной компонентой тензора напряжений,
**которая может быть отлична от нуля на боковой поверхности стержня, а
поэтому и внутри него, является компонента σ 22 . Величину этой компоненты
можно определить из граничных условий на торце стержня, где приложена
растягивающая сила F2 или единичная поверхностная сила σ 2( n2 ) , равная
σ 2( n ) = σ 2 k nk = P.
(5.3.3)
2
38
Поскольку для элемента площади торца n1 = n3 = 0 , но n2 = 1, из (5.3.3) следует:
σ = P.
22
(5.3.4)
Теперь можно найти компоненты тензора деформаций, используя закон
Гука (5.2.4). Действительно, для однородного стержня, как показано выше, при
i ≠ k все недиагональные элементы тензора напряжений σ ik равны нулю, также
равны нулю и недиагональные элементы тензора деформаций ε ik согласно
(5.2.4). Для диагональных (i = k ) элементов ε ik , поскольку σ 22 = P, из (5.2.4)
следует:
1⎛ 1
1 ⎞
1⎛ 1 1 ⎞
ε 11 = ε 33 = ⎜ −
(5.3.5)
⎟ P, ε 22 = ⎜ + ⎟ P.
3 ⎝ 3κ 2 μ ⎠
3 ⎝ 3κ μ ⎠
5.3.2. Модуль Юнга и коэффициент Пуассона - феноменологические
коэффициенты
Компоненты тензора деформаций ε 11 = du1 / dx1 , ε 33 = du3 / dx3 определяют
относительное сжатие стержня в поперечном направлении, а компонента
тензора деформаций ε 22 = du 2 / dx2 определяет относительное удлинение
стержня вдоль оси x2. Из (5.3.5) следует:
ε 11 = ε 33 =
2 μ − 3κ
P
9κμ
P, ε 22 = , E =
.
18μκ
E
3κ + μ
(5.3.6)
Здесь величину E называют модулем Юнга; он имеет размерность давления, т. е.
размерность силы, делённой на площадь. По определению (5.3.6) модуль Юнга
– это такая приложенная к единице поверхности торца стержня сила
растяжения P, при которой относительное удлинение стержня равно 1.
Отношение относительного поперечного сжатия к относительному
продольному растяжению называют коэффициентом Пуассона и обозначают
как
1 3κ − 2 μ
ε
σ = − 11 = ⋅
.
(5.3.7)
ε 22 2 3κ + μ
Поскольку, как показано выше, модуль всестороннего сжатия κ и модуль сдвига
μ всегда положительны, то из (5.3.7) видно, что коэффициент Пуассона может
изменяться в пределах от -1, когда тело не сопротивляется сжатию (κ = 0), до
1/2, когда тело не сопротивляется сдвигу (μ = 0). Следовательно, коэффициент
Пуассона изменяется в пределах − 1 < σ < 1 2 . В действительности же, как
показывает опыт, коэффициент Пуассона изменяется от нуля до 1/2, т.к. в
природе неизвестны тела, имеющие отрицательное значение коэффициента
Пуассона, т. е. неизвестны тела, у которых увеличивались бы поперечные
39
размеры при их растяжении. Коэффициент Пуассона, близкий к 1/2,
наблюдается у тел типа резины, у которых модуль сдвига очень мал. Таким
образом, для реальных тел справедливо неравенство
0 <σ <
1
.
2
Пользуясь формулами (5.1.3), (5.3.6) и (5.3.7), можно выразить модуль
всестороннего сжатия κ, модуль сдвига μ и коэффициент Ламэ λ через модуль
Юнга E и коэффициент Пуассона σ с помощью формул:
κ=
σE
E
E
, μ=
, λ=
.
(1 − 2σ )(1 + σ )
3(1 − 2σ )
2(1 + σ )
(5.3.8)
Очевидно, что все предыдущие соотношения между εik и σ ik могут быть
записаны с применением только модуля Юнга Е и коэффициента Пуассона σ .
Таким образом, два из любых введенных коэффициентов полностью
характеризуют упругие свойства среды. В механике сплошных сред они
являются феноменологическими коэффициентами, определяемыми из опыта.
Необходимо лишь выбрать опыт, из которого эти коэффициенты извлекались бы
наиболее просто и надежно, без каких-либо приближений теории опыта.
Разумность введения новых модулей Юнга и Пуассона подтверждается
чистотой и простотой опыта, из которого они могут быть определены. Как
показано выше, они могут быть получены из простых опытов по растяжению
стержней. Для этого достаточно измерить лишь изменение продольных и
поперечных размеров стержней при растяжении. Очевидно, что опыт по
растяжению стержня не является единственным, из которого можно определить
эти феноменологические коэффициенты, тем более не из каждого материала
можно изготовить стержень.
Конечно, зная силы, действующие между молекулами или атомами,
составляющими тело, и характер их движения, можно теоретически вычислить
эти коэффициенты, но это уже предмет не механики сплошных сред, а
некоторой микроскопической теории. В механике же сплошных сред модуль
Юнга и коэффициент Пуассона должны быть определены из опыта.
Относительное изменение объёма стержня при растяжении согласно
(2.3.4) и (5.3.5) равно
1P
ΔV
= ε ii =
.
(5.3.9)
3κ
V
Из сравнения данного результата с изменением относительного объёма при
всестороннем равномерном сжатии (5.2.6) видно, что при одноосном
растяжении относительное изменение объёма в три раза меньше, чем при
40
всестороннем сжатии. Различие знаков в определениях (5.2.6) и (5.3.9)
обусловлено противоположным направлением действия внешних сил на
поверхность тела.
Изменение свободной (упругой) энергии единицы объёма стержня при
растяжении согласно (5.2.8), (5.2.3) и (5.3.5) равно
1
1 P2
ΔF = σ 22ε 22 =
.
2
2 E
(5.3.9)
41
5.4. СВОБОДНАЯ ЭНЕРГИЯ НЕИЗОТЕРМИЧЕСКОГО ДЕФОРМИРОВАНИЯ
5.4.1. Тензоры деформаций и напряжений при неизотермическом
деформировании
Соотношение (5.1.3) определяет свободную энергию единицы объёма
деформируемого тела при изотермическом деформировании. Теперь определим
свободную
энергию
единицы
объёма
тела
при
деформациях,
сопровождающихся изменением его температуры. Температура может
изменяться как вследствие подвода или отвода тепла при помощи внешних по
отношению к телу источников, так и в результате самого процесса
деформирования.
Пусть в недеформированном состоянии температура рассматриваемого
элемента объёма тела равна Tо. При изменении температуры этот элемент
объёма испытывает температурную деформацию, даже если внешние силы
отсутствуют. Поэтому в разложении свободной энергии по компонентам
тензора деформаций εik теперь могут быть и линейные по этим компонентам
слагаемые, которые должны исчезать при T = То. Если деформации вследствие
изменения температуры малы, то можно считать их просто пропорциональными
изменению самой температуры ΔT = T – Tо. Для простоты рассмотрим
изотропное тело, характеризуемое лишь одним коэффициентом линейного α
или объемного 3α теплового расширения. Так как свободная энергия является
скалярной величиной, то единственным выражением для дополнительного
слагаемого ΔFT в определении свободной энергии, связанного с изменением
температуры, будет выражение вида
ΔF T = A(T − To )ε ii = A(T − To )δ ik ε ik ,
(5.4.1)
где A – некоторый коэффициент, независящий в первом приближении от
температуры. Тогда в соответствии с (5.1.3) и (5.4.1) свободная энергия F(T)
равна
κ
2
1
⎞
⎛
F (T ) = Fo (To ) + ε ll + μ ⎜ ε ik − δ ik ε ll ⎟ + A(T − T0 )δ ik ε ik .
2
3
⎝
⎠
2
(5.4.2)
Дифференцируя полученное выражение по εik , как и в п. 5.2, с учетом (5.2.3)
для тензора напряжений σ ik имеем
σ ik = κδik εll + 2 μ⎛⎜ εik − δik εll ⎞⎟ + A(T − T0 )δik .
⎝
1
3
⎠
(5.4.3)
Для определения коэффициента A через уже известные величины
воспользуемся тем фактом, что при свободном однородном тепловом
42
расширении тела (при отсутствии внешних сил) внутренние напряжения
должны отсутствовать, т. е. σ ik = 0 . В этом случае из (5.4.3) следует
1
0 = kε llδ ik + 2 μ (ε ik − ε llδ ik ) + A(T − T0 )δ ik .
3
Если данное равенство умножить на δik , то второе слагаемое обращается в нуль,
и, используя (2.4.4), получим
εll = −
A
(T − To ) ≡ εiiT =⎛⎜ ΔV ⎞⎟ = 3α(T − To ) , A = −3ακ .
κ
⎝ V ⎠P
(5.4.4)
Таким образом, тензор напряжений σ ik , учитывающий и температурную
деформацию для изотропного тела, имеет вид
σ ik = κε ll δ ik + 2μ ⎛⎜ ε ik − ε ll δ ik ⎞⎟ - 3ακ ( T - T0 )δ ik .
⎝
1
3
⎠
(5.4.5)
Здесь последнее слагаемое описывает напряжения, связанные с изменением
температуры тела. Следует иметь в виду, что это слагаемое получено в
отсутствие действия внешних сил. Повторяя вывод закона Гука для тензора
деформаций, получим формулу
ε ik =
1
1 ⎛
1
⎞
σ llδ ik +
⎜ σ ik − σ llδ ik ⎟ + α (T-T0 )δ ik .
9κ
2μ ⎝
3
⎠
(5.4.6)
5.4.2. Адиабатические и изотермические модули
Если деформирование тела происходит при постоянной температуре, то
свободная энергия определяется согласно (5.1.3). Модули κ и μ в (5.1.3)
называют изотермическими модулями. Однако деформация может совершаться
и адиабатически, т. е. без притока тепла в элемент объёма извне и без передачи
тепла из выделенного элемента соседним или, иначе говоря, при его постоянной
энтропии (например, при быстром деформировании). В этом случае
коэффициенты κ и μ имеют другое, адиабатическое значение при малых
деформациях, вообще говоря, мало отличающееся от их изотермических
значений.
Вычислим значение температуры тела при адиабатической деформации,
т. е. при SV = const . Для этого воспользуемся соотношением (4.2.3), из которого
следует
⎛ ∂F ⎞
SV = −⎜
⎟ .
⎝ ∂T ⎠ε ik
Дифференцируя (5.4.2) по температуре, получим с точностью до слагаемых
первого порядка малости по компонентам тензора деформации:
43
SV (T ) = S o (T ) + 3ακε ii .
(5.4.7)
Здесь SV (T) – энтропия единицы объёма при температуре T после деформации,
So(T) – энтропия единицы объёма при температуре T в деформированном
состоянии без температурных деформаций. Следовательно, So(T) получено
дифференцированием свободной энергии при εii = 0, т. е. при постоянном
объёме.
При адиабатическом деформировании энтропия единицы объёма
должна оставаться постоянной, т. е.
SV (T ) = S o (To ) = S o (T ) + 3akε ii .
(5.4.8)
Здесь So(To) – энтропия единицы объёма при температуре To и при отсутствии
деформаций.
Разлагая разность энтропий в ряд по степеням (T – To) при постоянном
объёме V, ограничиваясь линейными по (T – To) слагаемыми и используя
термодинамическое определение удельной теплоёмкости при постоянном
объёме CV , получаем
C
⎛ ∂S ⎞
S o (T ) − S o (To ) = ⎜ V ⎟ (T − To ) + K = V (T − To ) .
T
⎝ ∂T ⎠V
(5.4.9)
Таким образом, из сравнения (5.4.8) и (5.4.9) находим, что изменение
температуры элемента объёма при адиабатическом деформировании равно
T − To = −
3ακT
ε ii .
CV
(5.4.10)
Подставляя в (5.4.3) разность температур T – To согласно (5.4.10),
получим аналогичное (5.2.3) выражение для σ ik с новым модулем сжатия κад,
соответствующим адиабатическому процессу деформирования:
⎛
⎝
1
3
⎞
⎠
σ ik = κ a∂ δ ik ε ll + 2 μ ⎜ ε ik − δ ik ε ll ⎟ .
(5.4.11)
Здесь адиабатический модуль сжатия κад определяется формулой
κ a∂ =
9α 2κ 2T
+ κ.
CV
(5.4.12)
Для изотермического деформирования в соответствии с (5.2.7) и для
адиабатического деформирования по аналогии с (5.2.7) можно записать:
1 ⎛ ∂V ⎞
1
⎜
⎟ =− ,
V ⎝ ∂P ⎠T
κ
1 ⎛ ∂V ⎞
1
.
⎜
⎟ =−
V ⎝ ∂P ⎠ S
κ a∂
(5.4.13)
44
Если первую величину в (5.4.13), как отмечалось ранее называют
изотермической сжимаемостью, то вторую величину в (5.4.13) называют
адиабатической сжимаемостью.
Используя правила преобразования термодинамических величин *) и
полученные соотношения (5.4.12), (5.4.13), легко получить формулы,
связывающие адиабатический и изотермический модули:
1
CV
= κ = ,
C p κ a∂ γ
9α 2T
= −
.
κ a∂ κ
CP
1
1
(5.4.14)
Здесь γ – показатель адиабаты. Нетрудно видеть, что κад > κ. Следовательно,
(ΔV / V ) S < (ΔV / V )T .
Очевидно, эти изменения не касаются модуля сдвига, т.е. модуль сдвига
адиабатический равен изотермическому модулю сдвига ( μад = μ). Пользуясь
формулами (5.3.8) и (5.4.14), можно получить соотношения между
адиабатическим и изотермическим модулями Юнга и коэффициентами
Пуассона.
При адиабатическом деформировании связь между компонентами
тензоров напряжений и деформаций будет иметь вид, аналогичный (5.2.3) и
(5.2.4):
1
⎛
⎞
3
⎝
⎠
1
1 ⎛
1
⎞
ε ik =
σ llδ ik +
⎜ σ ik − σ llδ ik ⎟ ,
9k ад
2μ ⎝
3
⎠
σ ik = κ a∂ ε llδ ik + 2 μ ⎜ ε ik − ε llδ ik ⎟ ,
(5.4.15)
т. е. уравнения Гука имеют прежний вид (5.2.3) и (5.2.4), только в них следует
изотермический модуль сжатия κ заменить адиабатическим κад по формуле
(5.4.14).
_________________________
*) Действительно, пользуясь известным правилом преобразования термодинамических
величин, можно получить следующие соотношения:
⎛∂ V ⎞
⎛∂ S ⎞
⎜
⎟ = −⎜
⎟
⎝ ∂ P ⎠S
⎝ ∂ P ⎠V
⎛∂ S ⎞
⎜
⎟ ,
⎝ ∂ V ⎠P
⎛∂ V ⎞
⎛∂ T ⎞
⎜
⎟ = −⎜
⎟
⎝ ∂ P ⎠T
⎝ ∂ P ⎠V
⎛∂ T ⎞
⎜
⎟ .
⎝ ∂ V ⎠P
Деля первое равенство на второе, получаем
⎛∂ V ⎞
⎜
⎟
⎝ ∂ P ⎠S
⎛∂ V ⎞ ⎛∂ S ⎞
⎜
⎟ =⎜
⎟
⎝ ∂ P ⎠ T ⎝ ∂ T ⎠V
κ
⎛ ∂ S ⎞ CV
=
.
⎜
⎟ =
⎝ ∂ T ⎠ P C P κ a∂
45
6. ФУНДАМЕНТАЛЬНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ
СПЛОШНОЙ СРЕДЫ
6.1. ТЕНЗОР СКОРОСТЕЙ ДЕФОРМАЦИИ
Как следует из теоремы Коши-Гельмгольца (п. 2.5), общее перемещение
достаточно малого элемента деформируемого тела вблизи точки Q(r + dr ) в
окрестности произвольной точки P(r) может быть представлено в виде
ui (r + dr ) = ui (r ) + d ui = ui (r ) + ϕ ik d xk + ε ik d xk .
(6.1.1)
Если это малое перемещение происходит за физически малый промежуток
времени Δt, то, деля каждое слагаемое равенства (6.1.1) на Δt, в пределе Δt→dt
будем иметь
υ i = υ o i + ϕ& ik d xk + ε&ik d xk .
(6.1.2)
Здесь υ i есть i-ая компонента скорости υ = υ(υ1 , υ 2 , υ3 ) точки Q (r + dr ) ,
находящейся в дифференциальной окрестности первого порядка около точки
P(r); υ o i – i-ая компонента скорости точки P как полюса; величины ϕ&ik и ε&ik
определяются соотношениями:
1 ⎛ ∂υ ∂υ ⎞
1 ⎛ ∂υ ∂υ ⎞
ϕ&ik = ⎜⎜ i − k ⎟⎟ , ε&ik = ⎜⎜ i + k ⎟⎟ .
2 ⎝ ∂xk ∂xi ⎠
2 ⎝ ∂xk ∂xi ⎠
(6.1.3)
В (6.1.3) величины ϕ& ik и ε&ik называют тензорами скоростей поворота и
скоростей деформации соответственно. Как компоненты ϕ ik определяют вектор
поворота ϕ, так и компоненты ϕ& ik определяют вектор скорости поворота ω.
Величины компонент вектора ω характеризуют модуль угловой скорости
поворота ω окрестности точки P(r) .
Нетрудно получить из (2.2.7) и (2.3.5) по аналогии с (6.1.2) следующие
соотношения:
1
ω = rot υ ,
2
1 dV = div υ .
V dt
(6.1.4)
В векторном виде равенство (6.1.2) можно записать как:
υ = υ 0 + [ω × dr ] + dυ деф .
(6.1.5)
Если во время движения изменяется и температура, то деформационная часть
скорости должна включать и скорость деформации вследствие изменения
температуры, пропорциональную ∂T ∂t , т. е.
dυ iT = ε&ikT dxk = α ik (∂T / ∂t )dxk .
(6.1.6)
46
6.2. ДИФФЕРЕНЦИРОВАНИЕ ПО ВРЕМЕНИ ИНТЕГРАЛА ПО ПОДВИЖНОМУ
ОБЪЁМУ
Получим формулу дифференцирования по времени интеграла по
некоторому движущемуся в пространстве объёму. Пусть f(r, t) есть
произвольная функция координат и времени (это может быть масса, импульс,
энергия и т. п.). Рассмотрим производную по времени от некоторого интеграла
по объёму, т. е. d ∫ f (r, t )dV . Здесь объём V есть некоторый индивидуальный
dt (V )
объём, который состоит из одних и тех же частиц, в процессе движения среды
он может изменять как свою форму, так и величину. Характерной особенностью
индивидуального объёма является то обстоятельство, что через его поверхность
нет потока вещества, т.к. он состоит в течение всего процесса движения из
одних и тех же частиц.
Полная производная по времени определяет изменение с течением
времени выше приведенного интеграла не только вследствие изменения с
течением времени подынтегральной функции f, но также и вследствие
изменения в процессе движения самого объёма V. Вычислим указанную выше
производную по времени:
d
d
d
⎛ df
⎞
⎛ df
⎞
fdV = ∫ ⎜ dV + f dV ⎟ = ∫ ⎜ dV + f (dx1dx2 dx3 )⎟ =
∫
dt (V )
dt
dt
⎠
⎠ (V ) ⎝ dt
(V ) ⎝ dt
⎛ df
⎞
= ∫ ⎜ dV + f (dυ1dx2 dx3 + dx1dυ 2 dx3 + dx1dx2 dυ 3 )⎟ .
⎠
(V ) ⎝ dt
(6.2.1)
Если второе, третье и четвёртое слагаемые в (6.2.1) умножить и разделить
соответственно на dx1 , dx2 и dx3 , то их сумма даёт fdivυdV .
Таким образом, дифференцирование по времени от интеграла по
индивидуальному объёму необходимо выполнять по формуле
d
⎛ df
⎞
fdV = ∫ ⎜ + fdivυ ⎟dV .
∫
(V )⎝ dt
dt (V )
⎠
(6.2.2)
6.3. УРАВНЕНИЕ НЕПРЕРЫВНОСТИ
6.3.1. Различные формы уравнения непрерывности
Используя формулу (6.2.2), нетрудно получить уравнение, которое
представляет собой закон сохранения массы любого индивидуального объёма
среды, состоящего из одних и тех же частиц. Выделим в движущейся среде
47
некоторый индивидуальный объём V вещества. Если ρ = ρ (r, t ) есть массовая
плотность, то масса M вещества в этом объёме равна
M = ∫ ρ (r, t )dV .
(V )
(6.3.1)
В соответствии с определением индивидуального объёма эта величина
должна сохраняться с течением времени в процессе движения, т. е.
dM d
=
ρ (r, t ) dV = 0.
dt (V∫ )
dt
Пользуясь формулой (6.2.2), последнее равенство можно записать в следующем
виде
dρ
⎛
⎞
∫( )⎜ dt + ρ diV υ ⎟ dV = 0.
V
⎝
⎠
(6.3.2)
Поскольку равенство (6.3.2) должно выполняться для произвольного элемента
объёма, то для его выполнения необходимо равенство нулю подынтегрального
выражения, т. е.
dρ
+ ρ diV υ = 0.
dt
(6.3.3)
Уравнение (6.3.3) называют уравнением непрерывности или уравнением
сохранения массы – это первое основное уравнение сохранения механики
сплошных сред.
Поскольку индивидуальный объём V перемещается в физическом
пространстве, то координаты функции ρ ( x1 , x2 , x3 , t ) следует рассматривать как
координаты движущейся индивидуальной частицы, неявно зависящие от
времени. Поэтому полную производную плотности по времени можно записать
следующим образом:
dρ ∂ρ ∂ρ d x1 ∂ρ d x2 ∂ρ d x3 ∂ρ
=
+
+
+
=
+ (υ∇ )ρ .
dt ∂ t ∂x1 dt ∂x2 dt
∂x3 dt
∂t
(6.3.4)
Учитывая (6.3.4) и соотношение из векторной алгебры div( ρυ) = (υ∇) ρ + ρdivυ ,
уравнение непрерывности (6.3.3) можно записать в следующем виде:
∂ρ ∂ρυ k
∂ρ
+ diV ρυ = 0 ,
+
=0.
∂t
∂t
∂xk
(6.3.5)
48
6.3.2. Интегральная и дифференциальная форма уравнения
непрерывности с источниками и стоками
Вывод уравнения непрерывности, как это ясно из самого вывода,
справедлив, если внутри рассматриваемого индивидуального объёма нет
источников или стоков вещества. Если внутри объёма V имеются источники или
стоки мощностью Qi, то уравнение непрерывности в интегральной форме имеет
вид
n
dM
⎛ ∂ρ
⎞
= ∫⎜
+ diν ρυ ⎟ dV = ∑ Qi .
i =1
dt (V )⎝ ∂t
⎠
(6.3.6)
Правая часть уравнения (6.3.6) есть алгебраическая сумма мощностей
источников (+) и стоков (-). Мощность источника или стока Qi равна количеству
вещества, поставляемого источником или отводимого стоком в единицу
времени. Источники или стоки могут быть распределены в пространстве как
дискретно, так и непрерывно. Например, если рассматривать уравнение
сохранения числа нейтронов в делящемся материале, то в интегральной форме
это уравнение можно, очевидно, записать в виде
∂ρ
⎛
⎞
∫( )⎜ ∂t + diν ρυ ⎟ dV = (∫ )v dV .
V
⎝
⎠
(6.3.7)
V
Здесь ρ – число нейтронов в единице объёма, υ – скорость диффузии
нейтронов, v– разность числа нейтронов, рождающихся и поглощающихся в
среде в единице объёма в единицу времени.
Нетрудно видеть из (6.3.7), что уравнение непрерывности с
непрерывными в пространстве источниками или стоками можно записать и в
дифференциальной форме. Однако этого сделать нельзя в случае их
дискретного распределения. Поэтому уравнение непрерывности в
дифференциальной форме (6.3.5) справедливо во всех точках пространства,
занятого средой, кроме точек, в которых расположены источники и стоки.
Интегральная форма уравнения непрерывности является более общей,
поскольку позволяет записать его в любом случае.
Для несжимаемой среды плотность вещества не зависит ни от координат, ни от
времени, т. е. (∂ρ / ∂t ) = 0, (∂ρ / ∂xi ) = 0 и, следовательно, имеем
dρ ∂ρ
=
+ υ ⋅ ∇ ρ ≡ 0.
dt ∂t
(6.3.8)
Тогда из (6.3.8) следует, что для всех точек пространства, занимаемого
несжимаемой средой (кроме точек пространства, в которых расположены
источники и стоки), справедливо выражение
diν υ = 0.
(6.3.9)
49
Уравнение (6.3.9) называют условием несжимаемости сплошной среды.
Для стационарного состояния, когда плотность ρ не зависит от времени,
но может зависеть от координат, из (6.3.5) имеем
∂ρ
= 0, diν ρυ = 0.
∂t
(6.3.10)
Уравнение (6.3.10) называют условием стационарного движения сплошной
среды.
6.4. УРАВНЕНИЕ СОХРАНЕНИЯ КОЛИЧЕСТВА ДВИЖЕНИЯ
6.4.1. Вывод уравнения сохранения количества движения
Из курса общей физики известно, что изменение в единицу времени
импульса любой частицы определяется действующей на неё силой (второй
закон Ньютона). Тогда изменение во времени полного импульса П всех
элементов объёма сплошной среды определяется результирующей всех сил,
действующих в этом объёме, т. е.
dп
=F =F +F .
s
V
dt
(6.4.1)
Если ρυ есть импульс (количество движения) единицы объёма, то
полный импульс П, i-ая компонента полного импульса П i некоторого
индивидуального объёма V сплошной среды и его полная производная по
времени равны:
П = ∫ ρυ dV , П i = ∫ ρυi dV ,
(V )
(V )
dП i d
=
∫ ρυi dV .
dt
dt (V )
(6.4.2)
Пользуясь уравнением (6.2.2), получаем
dП i
dυ
⎛ dρυi
⎞
⎛ dρ
⎞
= ∫⎜
+ ρυi div υ ⎟dV = ∫ ρ i dV + ∫ υ i ⎜
+ ρ diV υ ⎟ dV .
(V )
(V ) ⎝ dt
dt (V )⎝ dt
dt
⎠
⎠
Второй интеграл в соответствие с уравнением непрерывности (6.3.5) равен
нулю, поэтому имеем
dП i
dυ
= ∫ ρ i dV .
dt (V ) dt
(6.4.3)
Найдем результирующую силу F , действующую на рассматриваемый
объём V. Объёмные силы можно найти по формуле
FV i = ∫ f i v dV = ∫ ρ f i m dV .
(V )
(V )
где f i m – напряженность массовой силы (см. п. 3.1.1).
(6.4.4)
50
Результирующая поверхностных сил, действующих на единицу объёма,
была определена ранее формулой (3.2.4) и равна f S i = ∂σ ik / ∂xk . Полная
результирующая поверхностная сила FSi, действующая на объём V, равна
∂σ ik
dV .
(V ) ∂x
k
FS i = ∫
(6.4.5)
Подставляя уравнения (6.4.3–5) в уравнение (6.4.1) и собирая все члены в левую
часть, получим следующее уравнение:
⎛ dυ i
∂σ ik ⎞
∫ ⎜⎜ ρ dt − ρ f − ∂x ⎟⎟ dV = 0.
( )⎝
⎠
m
i
V
k
Данное уравнение должно выполняться для любого индивидуального объема.
Следовательно, должно равняться нулю подынтегральное выражение, т.е.
ρ
∂σ ik
dυ i
= ρ ⋅ fi m +
.
dt
∂xk
(6.4.7)
Уравнение (6.4.7) называют уравнением сохранения количества
движения или просто уравнением движения сплошной среды. Данное
уравнение, по существу, является законом Ньютона, записанным для единицы
объёма сплошной среды (массы ρ). Левая часть уравнения (6.4.7) представляет
собой действующую на единицу объёма ньютоновскую силу и ускоряющую его
движение, а правая – сумму массовых и поверхностных сил, действующих на ту
же единицу объёма среды и определяющих эту ньютоновскую силу.
6.4.2. Субстанциональное и локальное описание движения
сплошной среды
Уравнение движения в форме (6.4.7) можно применить для описания
движения отдельной индивидуальной частицы. Зная начальные координаты и
компоненты скорости этой частицы в некоторый момент времени, можно,
решив это уравнение, найти его координаты в любой момент времени, т.е. найти
её траекторию движения. Зная траектории движения всех частиц,
составляющих данное сплошное тело, можно составить полное представление о
характере движения сплошной среды в целом. Такой подход к описанию
движения сплошной среды называют субстанциональным или описанием в
представлении Лагранжа.
Однако такой способ описания не всегда удобен. Для составления
полного представления о характере движения сплошной среды достаточно
знать, как изменяется скорость в данной точке неподвижного пространства,
через которую с течением времени будут проходить, вообще говоря, различные
индивидуальные частицы сплошной среды. Вместе со сведениями о таких
51
изменениях в различных точках пространства получается довольно полное
представление о характере движения. Такое описание движения называют
локальным или описанием в представление Эйлера. Субстанциональный подход
ввиду большой сложности неудобен еще и тем (особенно в гидродинамике), что
в процессе достаточно длительного движения рассматриваемая индивидуальная
частица может настолько сильно деформироваться, что трудно о ней говорить
как о частице, форма которой не влияет на результаты рассмотрения.
Поскольку υ = υ(r, t ) и r = r (t ) , то полную производную скорости по
времени в (6.4.7) можно записать в следующем виде:
dυi ∂υi ∂υi dx1 ∂υi dx2 ∂υ i dx3
=
+
+
+
,
dt
∂t ∂x1 dt ∂x2 dt ∂x3 dt
dxi
= υi .
dt
Поэтому последнее соотношение можно записать:
∂υ
dυi ∂υ i
=
+ υk i .
dt
∂xk
∂t
(6.4.8)
Из формулы (6.4.8) следует, что полное изменение во времени скорости
индивидуальной частицы можно разделить на две части. Первая часть
представляет собой изменение скорости в данной неподвижной точке
пространства с течением времени. Вторая часть описывает изменение скорости
при движении индивидуальной частицы из одной точки пространства в другую
точку в данный момент времени.
Уравнение движения (6.4.7) с учетом (6.4.8) имеет вид
∂υi
1 ∂σ ik
∂υ
+ υk i = f i +
.
ρ ∂xk
∂t
∂xk
(6.4.9)
m
Здесь и в дальнейшем f i ≡ f i . В векторном виде это уравнение можно
записать:
1t
∂υ
+ (υ∇ ) υ = f + σ ,
∂t
ρ
(σt )i = ∂∂ σx
ik
.
(6.4.10)
k
В уравнении (6.4.10) запись второго слагаемого в правой части чисто условная,
смысл которой дается аналогичным слагаемым в уравнении (6.4.9).
6.5. УРАВНЕНИЕ СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
СПЛОШНОЙ СРЕДЫ
Из курса общей физики известно, что изменение во времени полного
момента М количества движения некоторого объёма V относительно некоторой
точки определяется моментом К всех сил, действующих на этот объём
относительно той же точки. Математическая запись этого закона следующая:
52
dM
= K.
dt
(6.5.1)
Если [r × ρυ] есть момент количества движения единицы объёма относительно
точки, находящейся на расстоянии r от начала координат, то полный момент М
количества движения всех элементов некоторого индивидуального объёма тела
будет равен
M = ∫ [r × ρ υ] dV .
(6.5.2)
(V )
Индивидуальный объём, состоящий из одних и тех же частиц, может
dM / dt ,
изменяться в процессе движения. Найдем производную
воспользовавшись формулой преобразования (6.2.2):
dM d
[r × ρυ] dV = ∫ ρ d [r × υ] dV + ∫ [r × υ]⎛⎜ dρ + ρ div υ ⎞⎟dV .
=
∫
(V )
(V )
dt
dt (V )
dt
⎝ dt
⎠
Второй интеграл здесь равен
непрерывности. Поэтому имеем
нулю
в
соответствии
с
уравнением
dM
d ⎡ dυ ⎤
= ∫ [υ × υ] ρ dV + ∫ ρ ⎢r × ⎥ dV .
(V )
(V )
dt
dt ⎣ dt ⎦
Здесь первый интеграл равен нулю из-за векторного произведения вектора
самого на себя. Поэтому изменение количества движения можно записать в
виде
dM
⎡ dυ ⎤
= ∫ ρ ⎢r × ⎥ dV .
dt
dt ⎦
(V ) ⎣
(6.5.3)
Формулу (6.5.3) для i-ой компоненты момента М можно записать в виде
dM i
dυ
= ∫ ρε ikl xk l dV .
(V )
dt
dt
(6.5.4)
Здесь εikl– антисимметричный тензор третьего ранга или символ Леви-Чивита *).
Далее рассмотрим момент всех сил, действующих на выделенный
индивидуальный объем. Разделим действующие силы на силы объемные и силы
поверхностные. Тогда полный момент сил равен
K = KV + K S .
(6.5.5)
Момент KV объёмных сил можно записать в следующем виде:
K V = ∫ [r × f ]ρ dV , K V i = ∫ ε ikl xk f l ρ dV .
(V )
(V )
(6.5.6)
53
Для поверхностных сил имеем
K S = ∫ [r × σ ( n ) ]dS , K S i = ∫ ε ikl xkσ l( n ) dS .
(S )
(S )
(6.5.7)
Поскольку для поверхностных напряжений справедливо соотношение
n
σ (l ) = σ lmnm , то момент поверхностных сил K S i , пользуясь теоремой ГауссаОстроградского, можно записать в форме:
∂
(ε ikl xkσ lm )dV ;
(V ) ∂x m
K S i = ∫ ε ikl xk σ lm dS m = ∫
(S )
⎛ ∂σ lm
⎞
K S i = ∫ ε ikl ⎜⎜ xk
+ σ lmδ km ⎟⎟ dV .
(V )
⎝ ∂xm
⎠
(6.5.8)
После подстановки в исходное уравнение (6.5.1) определений (6.5.4–6) и (6.5.8),
перегруппировки слагаемых получаем уравнение
⎡
⎤
⎛ dυl
1 ∂σ lm ⎞
∫(V )⎢ε ikl xk ρ ⎜⎜ dt − f l − ρ ∂x ⎟⎟ − ε iklσ lmδ km ⎥ dV = 0.
m ⎠
⎝
⎣
⎦
Выражение в круглых скобках здесь равно нулю вследствие уравнения
сохранения количества движения (6.4.9). Из остальной части интеграла следует
ε iklσ lmδ km = 0 = ε imlσ lm .
Так как в правой части этого равенства значки дважды повторяются, то их
можно поменять местами
εimlσlm= 0 = - εilmσml .
Здесь знак (-) поставлен в соответствие с 4-м свойством символа Леви-Чивита.
Тогда можно записать следующее равенство:
ε imlσ lm + ε ilmσ ml = 0.
________________________________
*) Свойства символа Леви-Чивита:
1.
εikl =0, если среди индексов i, k, l есть два одинаковых (например, I = k, I = l, k
= l);
2. εikl = 1, если упорядоченная система индексов (1, 2, 3) получается чётным числом
перестановок;
3. εikl = −1, если упорядоченная система индексов (1, 2, 3) получается нечётным
числом перестановок;
4. εikl = −εilk;
5. [A × B]i = ε ikl Ak Bl , roti A = [∇ × A]i = ε ikl
∂Al
;
∂xk
6. Справедливы также следующие соотношения:
ε ikl ε imn = δ kmδ ln − δ knδ ml , ε iklδ km = ε iml .
54
Во втором слагаемом в символе Леви-Чивита ε ilm можно сделать одну
перестановку индексов l и m , т. е. ε ilm = - ε iml . Тогда имеем
ε iml (σ lm − σ ml ) = 0.
При произвольных ε iml последнее равенство будет выполняться только тогда,
когда
σ lm = σ ml .
(6.5.9)
Таким образом, из (6.5.9) следует, что тензор напряжений σ lm , как
отмечалось ранее в п. 3.1.3, является симметричным тензором второго ранга.
Этот вывод следует из уравнения сохранения момента количества движения
сплошной среды.
6.6. ТЕНЗОР ПЛОТНОСТИ ПОТОКА ИМПУЛЬСА
Найдём плотность потока импульса (количества движения) в некоторой
фиксированной точке пространства. Для этого рассмотрим некоторый объём V,
неподвижный в пространстве, и найдем изменение во времени импульса среды
в этом объёме. Очевидно, импульс среды в рассматриваемом объёме равен
П = ∫ ρυdV . Рассмотрим изменение во времени i-ой компоненты импульса.
(V )
Можно полагать, что изменение импульса в единицу времени в неподвижном
объёме V равно потоку импульса через поверхность S, ограничивающую этот
объём. Плотность потока некоторого скаляра является вектором. Плотность
потока вектора (импульса) является тензором второго ранга. Поэтому можно
записать следующее уравнение баланса (сохранения) импульса в неподвижном
объёме V в проекции на ось i:
∂П i ∂
= ∫ ρυi dV = − ∫ Π ik dS k .
(S )
∂t
∂t (V )
(6.6.1)
Здесь величина П ik есть тензор плотности потока импульса, т.е. это плотность
потока
i-ой
компоненты
импульса
через
единичную
площадку,
перпендикулярную оси к. Определим явный вид данного тензора в отсутствие
объёмных сил. Для этого преобразуем левую часть уравнения (6.6.1), пользуясь
уравнением непрерывности (6.3.5) и уравнением движения в отсутствие
действия объёмных сил (6.4.9), т. е.
⎛
∂
∂ρυ к
∂υ ⎞
∂υ ∂σ
⎛ ∂ρ
+ ρ i ⎟dV = ∫ ⎜⎜ − υi
− ρυ k i + ik
ρυi dV = ∫ ⎜υi
∫
( V )⎝
(V )
∂t (V )
∂t
∂хк
∂t ⎠
∂xk ∂xk
⎝
⎞
⎟⎟dV .
⎠
Первые два слагаемых в правой части можно записать в виде дивергенции
тензора ρυ iυ k и затем можно воспользоваться теоремой Гаусса-Остроградского
55
для перехода от интегрирования по объёму V к интегрированию по замкнутой
поверхности S , т. е.
∂
∂
ρυi dV = − ∫ (ρυiυ k − σ ik ) dV = − ∫ (ρυiυ k − σ ik ) dS k .
∫
(V ) ∂x
(S )
∂t (V )
k
(6.6.2)
Из сравнения (6.6.1) и (6.6.2) находим
П ik = ρυiυ k − σ ik .
(6.6.3)
Из (6.6.3) видно, что тензор плотности потока импульса П ik есть симметричный
тензор, характеризующий перенос импульса и связанный с перемещением
самой жидкости.
Если учесть действие массовых сил fi , то уравнение сохранения импульса
можно записать в виде
∂ρυi
∂П
= − ik + ρf i .
∂t
∂xk
(6.6.4)
Из (6.6.4) следует, что изменение импульса единицы объёма среды в заданной
точке пространства происходит как вследствие поступления импульса из
соседних частей среды, так и вследствие действия внешних массовых сил.
6.7. УРАВНЕНИЕ СОХРАНЕНИЯ ВНУТРЕННЕЙ ЭНЕРГИИ
Рассмотрим индивидуальный объём V сплошной среды. Для него
справедливо основное термодинамическое равенство dQV = dEвн + ∫ dAV dV . Но
(V )
согласно (4.1.5) dAV = −σ ik dε ik , поэтому
dEвн = dQV + ∫ σ ik dε ik dV .
(V )
Если разделить данное равенство на элемент времени Δt и перейти к пределу
Δt→dt, то получим
dEвн dQV
=
+ ∫ σ ik ε&ik dV .
dt
dt (V )
(6.7.1)
Второе слагаемое в (6.7.1), включающее в себя тензор скоростей деформаций,
может быть преобразовано следующим образом:
∂υ
1 ⎛ ∂υi ∂υ k ⎞
⎟⎟ = σ ik ⋅ i .
+
2 ⎝ ∂xk ∂xi ⎠
∂xk
σ ik ε&ik = σ ik ⎜⎜
(6.7.2)
56
Удобно перейти к внутренней энергии единицы массы εвн. Рассмотрим
некоторый индивидуальный объём V сплошной среды и запишем изменение его
внутренней энергии с течением времени
dEвн d
dρ ⎞
⎡⎛ dε
⎤
=
ρε вн dV = ∫ ⎢⎜ ρ вн + ε вн
⎟ + ρε вн div υ⎥ dV .
∫
(V )⎣⎝
dt
dt (V )
dt
dt ⎠
⎦
(6.7.3)
Здесь второе и третье слагаемые в сумме равны нулю в соответствии с
уравнением непрерывности, поэтому имеем
dEвн
dε
= ∫ ρ вн dV .
(V )
dt
dt
(6.7.4)
Аналогично работу сил внутренних напряжений, совершаемую в
единицу времени в рассматриваемом объёме, запишем в виде
∂υi
dAV
∫ dt dV = − ∫ σ ⋅ ε&dV = − ∫ σ ⋅ ∂x dV .
ik
V
ik
V
V
k
Рассмотрим изменение количества тепла, поступающего внутрь
некоторого индивидуального объёма от внешних источников с течением
времени. Если внутри объёма нет источников или стоков тепла, то тепло может
поступать внутрь объёма только через его поверхность. Если q есть вектор
плотности потока тепла, то уравнение баланса тепла в объёме V можно
записать в форме
dQV
= − ∫ qdS = − ∫ divq dV .
(S )
(V )
dt
(6.7.5)
Таким образом, уравнение баланса внутренней энергии (6.7.1) для
индивидуального объёма V с учётом (6.7.4, 5) записывается как
⎛ dε вн
∂υi ⎞
∫ ⎜⎜ ρ dt + divq − σ ∂x ⎟⎟ dV = 0.
( )
⎝
⎠
ik
V
(6.7.6)
k
Равенство (6.7.6) должно выполняться для любого индивидуального объёма.
Поэтому из (6.7.6) следует дифференциальное уравнение для изменения
внутренней энергии:
ρ
dε вн
∂υ
∂q
= − k + σ ik i .
∂x k
dt
∂xk
(6.7.7)
Полную производную от внутренней энергии ε вн = ε вн (r, t ) по времени
можно записать по аналогии с (6.3.4):
dε вн ∂ε вн
=
+ υ∇ε вн .
∂t
dt
(6.7.8)
57
Из уравнения (6.7.7) следует, что внутренняя энергия единицы объёма
изменяется вследствие притока тепла извне и работы сил внутренних
напряжений.
Воспользуемся термодинамическим равенством, записанным для
единицы массы при всестороннем равномерном сжатии в предположении, что
индивидуальным объёмом является удельный объем V0 = 1 ρ :
dρ
dε вн = dQ V − PdV = TdS − PdV = TdS + P ρ 2 .
Разделим это равенство на dt и найдем изменение энтропии единицы объёма во
времени, заменив dε вн dt с помощью (6.7.7). В результате получим
ρT
∂ υi
dS
P dρ ∂qk
=−
−
+ σ ik
.
dt
ρ dt ∂xk
∂ xk
(6.7.9)
Используя (6.7.8) в уравнении (6.7.7) и уравнение непрерывности в форме
(6.3.3) для замены первого слагаемого в уравнении (6.7.9), получим два
эквивалентных уравнения:
⎛ ∂ε вн
∂ε ⎞
dq
∂υ
+ υ k вн ⎟⎟ = − k + σ ik i ,
∂xk ⎠
dxk
∂xk
⎝ ∂t
⎛ ∂S
∂ υi
∂υ ∂q
∂S ⎞
⎟⎟ = P k −
ρT ⎜⎜ + υ k
+ σ ik
.
∂ xk
∂xk ⎠
∂xk ∂xk
⎝ ∂t
ρ ⎜⎜
(6.7.10)
k
Очевидно, что первое уравнение (6.7.10) является более общим, так как оно
справедливо при любой деформации.
6.8. ВЕКТОР ПЛОТНОСТИ ПОТОКА ПОЛНОЙ ЭНЕРГИИ. ВЕКТОР УМОВА ПОЙТИНГА
Полная энергия ρε единицы объёма среды определяется суммой её
внутренней, кинетической и потенциальной энергий, т. е.
ρε = ρ (ε вн + ε кин + ε пот ) ,
(6.8.1)
где ε есть полная энергия единицы массы.
Рассмотрим некоторый неподвижный объём V пространства. Уравнение
баланса полной энергии Е среды в этом объёме можно записать в виде
∂
∂
EdV = ∫ ρ (ε вн + ε кин + ε пот ) dV = − ∫ I ⋅ dS .
∫
(S )
∂t (V )
∂t (V )
(6.8.2)
Здесь вектор I представляет собой вектор плотности потока полной энергии, а
правая часть – полный поток энергии через поверхность S, ограничивающую
58
объём V . Найдём явное выражение вектора I. Для этого преобразуем левую
часть уравнения (6.8.2):
∂E ∂
∂ε
∂ε ⎞
∂ρ ⎤
⎡ ⎛ ∂ε
= ∫ ρε dV = ∫ ⎢ ρ ⎜ вн + кин + пот ⎟ + (ε вн + ε кин + ε пот ) ⎥ dV . (6.8.3)
(V )⎣ ⎝ ∂t
∂t ∂t (V )
∂t
∂t ⎠
∂t ⎦
Кинетическую энергию единицы массы среды и её производную по
времени можно записать в виде:
ε кин =
υ2
2
=
υiυi
2
,
∂ε кин
∂υ
= υк к .
∂t
∂t
(6.8.4)
Предположим, что потенциальная энергия единицы массы в данной
точке пространства от времени не зависит, т. е. ∂ε пот ∂t = 0. Для замены
слагаемых в (6.8.3) используем уравнение сохранения внутренней энергии
(6.7.10), уравнение непрерывности (6.3.5) и соотношение (6.8.4). В результате
получаем равенство
⎛
∂ε
∂q
∂υ
∂ρυk
∂
+
ρε dV = ∫ ⎜⎜ − ρυ k вн − k + σ ik i − ε вн
∫
(V )⎝
∂t (V )
∂xk ∂xk
∂xk
∂ xk
∂υ υ υ ∂ρυk
∂ρυk ⎞
⎟ dV .
+ ρυ k k − i i
− ε пот
∂t
∂ xk ⎟⎠
2 ∂ xk
(6.8.5)
Далее сделаем в (6.8.5) очевидные преобразования первого и четвертого,
третьего и последнего слагаемых и воспользуемся уравнением движения (6.4.9)
для замены ∂υ k ∂t в подынтегральном выражении. В результате имеем
⎛ ∂qk ∂ρυ k ε вн ∂υiσ ik
∂σ ik
∂υ
∂
⎜⎜ −
=
−
+
− υi
+ ρυiυ k i +
dV
ρε
∫
∫
(V )⎝
∂t (V )
∂xk
∂xk
∂xk
∂xk
∂xk
∂σ ik υiυi ∂ρυ k ∂ρυ k ε пот
∂ε ⎞
+ ρυ k f k + υ i
−
−
+ ρυ k пот ⎟⎟ dV .
∂xk
∂xk
∂xk ⎠
2 ∂xk
(6.8.6)
Предположим, что внешние силы fk являются потенциальными, т. е.
f k = − ∂ε пот ∂xk . Для дальнейших преобразований запишем очевидное
тождество
υ iυ i ∂ρυ k
2
∂xk
∂ υ2
∂ υ2
ρυ k − ρυ k
=
.
∂xk 2
∂xk 2
После подстановки данных выражений в (6.8.6) и проведения элементарных
преобразований получим
∂
∂ ⎛
υ2
⎞
ρε dV = − ∫ ⎜ qk + υ k ρε вн − υiσ ik + ρυk + υ k ρε пот ⎟ dV .
∫
(V ) ∂xk ⎝
∂t (V )
2
⎠
(6.8.7)
59
Интеграл по объёму V в (6.8.7) можно преобразовать в интеграл по поверхности
S, используя теорему Гаусса-Остроградского, т. е. (6.8.7) можно записать в
видеЖ:
∂
∂
ρε dV = −
∫
∫ [ρυ k (ε кин + ε вн + ε пот ) + qk − υiσ ik ] dS k .
∂t (V )
∂xk (V )
(6.8.8)
Из сравнения (6.8.2) и (6.8.8) следует:
I k = ρυ k ε + qk − υiσ ik ,
( ) (υσ ) = υ σ .
↔
I = ρυε + q − υσ ,
↔
k
i
(6.8.9)
ik
Вектор I есть вектор плотности потока полной энергии; его называют
вектором Умова-Пойтинга. Как видно, вектор плотности потока энергии I
состоит из трех существенно отличающихся частей.
1. ρ υε – конвективное слагаемое, описывающее перенос полной энергии
самой движущейся средой, его направление совпадает с направлением
движения среды. Если среда неподвижна, то это слагаемое равно нулю.
2. q – вектор плотности потока тепла, его направление определяется
направлением градиента температуры. Это слагаемое отлично от нуля и в
покоящейся среде.
↔
3. ⎛⎜ υσ ⎞⎟ – вектор плотности потока энергии, связанный с работой сил
⎝ ⎠
внутренних напряжений в единице объёма. Он также существует лишь в
движущейся среде, однако его направление не совпадает с направлением
скорости движения среды.
Имея в виду определение (6.8.9) для вектора I, из уравнения (6.8.7)
можно получить дифференциальное уравнение сохранения полной энергии
типа уравнения непрерывности в форме
∂ρε
+ div I = 0.
∂t
(6.8.10)
Однако в таком общем виде (дивергентном) уравнение сохранения внутренней
энергии применяется сравнительно редко, т. к. в большинстве случаев
оказывается проще рассматривать различные виды энергии в отдельности, если
задача это позволяет.
6.9. ФУНДАМЕНТАЛЬНАЯ ЗАМКНУТАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ
СПЛОШНОЙ СРЕДЫ
Система уравнений сохранения, описывающих движение сплошной
среды, включает уравнение непрерывности – уравнение сохранения массы
60
(6.3.5), уравнение движения – уравнение сохранения импульса (6.4.9) и
уравнение сохранения внутренней энергии (6.7.10) и записывается в виде
∂ρ ∂ρυ k
+
= 0,
∂t
∂xk
∂υ i
∂υ
1 ∂σ ik
+ υk i = fi +
,
∂t
∂xk
ρ ∂xk
(6.9.1)
⎛ ∂ε вн
∂ε ⎞
∂υ
∂q
+ υ k вн ⎟⎟ = − k + σ ik i .
∂xk ⎠
∂xk
∂xk
⎝ ∂t
ρ ⎜⎜
Здесь связь между тензорами напряжений σ ik и деформаций ε ik , а также
определение скоростей деформации υ i можно записать с помощью известных
соотношений:
1
⎛
⎞
σ ik = kε llδ ik + 2μ ⎜ ε ik − δ ik ε ll ⎟ − 3αk (T − T0 )δ ik ,
3
⎝
⎠
1 ⎛ ∂u
∂u ⎞
ε ik = ⎜⎜ i + k ⎟⎟,
2 ⎝ ∂xk ∂xi ⎠
υi =
dui
.
dt
Подставляя вышеприведенные соотношения в систему уравнений движения,
нетрудно видеть, что входящие в них скорости υ i можно выразить через
производные деформации ui по координатам x k и времени t.
Если внешние массовые силы f i известны, то для описания состояния
единицы объёма сплошной среды необходимо знать 10 неизвестных: P, ρ, T,
ε ‰ , ui , qi . Однако система уравнений (6.9.1) содержит только пять уравнений.
Следовательно, система не замкнута и не может иметь однозначного решения.
Для замыкания системы уравнений до полной необходимы дополнительные
соотношения.
При локальном термодинамическом равновесии в малой частице
сплошной среды необходимо знать уравнение состояния, связывающее P, ρ и T.
В общем случае для бесконечно малой частицы в качестве некоторого среднего
термодинамического давления в ней можно взять треть линейного инварианта
тензора напряжений согласно (5.2.5а), т. е.
P=−
⎛
⎞
1
(σ 11 + σ 22 + σ 33 ) = − 1 k ⎜⎜ ∂ u1 + ∂ u2 + ∂ u3 ⎟⎟ .
3
3 ⎝ ∂ x1 ∂ x2 ∂ x3 ⎠
(6.9.2)
Если известно, как правило, эмпирическое уравнение состояния типа
P = f ( ρ , T ) (для идеального газа – это P ρ = RT ), то с учётом (6.9.2) имеется
ещё одно уравнение для определения деформаций – термическое уравнение
состояния. Если известны теплоёмкость среды и характер процесса
61
деформирования, можно выразить внутреннюю энергию единицы массы εвн как
функцию, например, ρ и T, т. е. ε вн = ε вн (ρ , T ) – калорическое уравнение
состояния.
Таким образом, для замыкания системы уравнений (6.9.1) до полной
недостает еще трёх уравнений. Этими уравнениями являются эмпирические
уравнения Фурье для трех компонент плотности потока тепла q :
q = − λ ∇T ,
qi = −λ
∂T
.
∂xi
(6.9.3)
Здесь λ – коэффициент теплопроводности, в механике сплошных сред он
является феноменологическим коэффициентом.
Таким образом, система уравнений движения сплошной среды (6.9.1)
совместно с термическим, калорическим уравнениями и уравнениями Фурье
оказывается замкнутой. Она включает в себя некоторые опытные,
феноменологические коэффициенты, число которых определяется той или иной
моделью сплошной среды. Такую замкнутую систему уравнений называют
фундаментальной системой уравнений движения (уравнений сохранения).
Если интересуются не смещениями ui (r, t ) , а скоростями υi (r, t ) частиц
сплошной среды, то достаточно полученные из решения системы значения ui
продифференцировать по времени t. Для нахождения же компонент тензора
деформации ε ik необходимо продифференцировать полученные функции ui по
координатам x k . Если с самого начала нас интересуют неизвестные параметры
P, ρ , T , ε ‰’ , υi , qi , то смещения ui или траектории индивидуальных частиц
могут быть получены простым интегрированием ui = ∫ υ i dt .
Решение фундаментальной системы уравнений может быть
единственным, если оно будет удовлетворять начальным и граничным
условиям. Поскольку данная система уравнений в частных производных, то
необходимо задать не начальные условия для отдельных частиц сплошной
среды (в представлении Лагранжа), а краевые условия (в представлении
Эйлера), т. е. для получения единственного решения необходимо в начальный
момент времени задать все искомые функции на некоторой поверхности.
Например, в случае стационарной задачи, зная значение искомых функций на
некоторой замкнутой поверхности, необходимо найти значение этих функций в
любой точке объёма, ограниченного этой поверхностью.
В общем случае необходимо доказать теорему существования и
единственности решений фундаментальной системы уравнений. Однако в силу
значительной сложности и нелинейности уравнений системы такая теорема в
общем случае не доказана. Доказательство можно получить лишь для
простейших движений. Поэтому вместо строгого доказательства приходится
62
принять на веру, что решение данной системы существует, и при заданных
начальных и краевых условиях оно единственное. Эта уверенность основана на
хорошем совпадении теоретических и экспериментальных результатов при
изучении простых и сложных движений сплошной среды.
Все феноменологические коэффициенты в уравнениях системы в общем
случае могут быть функциями термодинамических параметров, например,
давления P и температуры T. Эта зависимость также должна быть найдена из
опыта. Если термодинамические параметры изменяются незначительно в
процессе
движения
или
если
зависимость
коэффициентов
от
термодинамических параметров слабая, то можно их полагать постоянными, не
зависящими ни от координат, ни от времени.
6.10. ТЕНЗОР ВЯЗКИХ НАПРЯЖЕНИЙ
В сплошной среде внутренние напряжения могут возникать под
действием внешних сил не только вследствие смещений одних участков среды
по отношению к другим, что описывается тензором деформации. Внутренние
напряжения могут возникать и вследствие различной скорости смещения
соседних элементов среды. Например, представим себе тонкую пластинку,
плавающую на поверхности жидкости (рис. 6.1). Если сдвинуть пластинку в
новое положение вдоль поверхности жидкости (ось x1 ), то она останется
неподвижной в новом положении, т. е. сила, возвращающая пластинку в
прежнее положение, отсутствует. Однако для того, что бы её сдвинуть,
необходимо приложить некоторую
силу
Fдв ,
которая
при
равномерном движении должна уравновешиваться некоторой силой
сопротивления жидкости Fс . Причём эта
x2
сила сопротивления существует до тех
Fс
Fдв
х1
пор, пока движется пластинка, т. е. пока
есть разность скоростей пластинки и
неподвижной вдали от неё жидкости.
υ x ( x2 )
Иначе говоря, сила, действующая на
пластинку (или на тонкий слой жидкости,
прилипающей к пластинке и движущийся
с нею как целое), возникает тогда, когда
Рис. 6.1
есть градиент скорости частиц жидкости,
нормальный к пластинке. Этот экспериментальный факт Ньютон записал в виде
формулы:
Fc = − σ 12 S ,
σ 12 = η
∂υ 1
.
∂x2
(6.10.1)
63
Здесь σ 12 – сила, действующая на единицу площади S пластинки, η - некоторый
феноменологический коэффициент, υ1 – скорость жидкости вблизи пластинки,
направленная вдоль поверхности жидкости; x2 – координата, перпендикулярная
поверхности пластинки. Таким образом, в среде при упругих деформациях
возникают напряжения, пропорциональные самой деформации, а при неупругих
деформациях возникают напряжения, пропорциональные скорости деформации.
Согласно закону Гука (5.2.3) компоненты тензора упругих напряжений
определяются компонентами тензора деформаций, т. е.
σ ik = kε ll δ ik + 2μ ⎛⎜ ε ik − ε ll δ ik ⎞⎟ .
1
3
⎝
⎠
По аналогии можно записать тензор неупругих напряжений в форме
⎛
⎝
1
3
⎞
⎠
σ~ik = ζε&ll δ ik + 2η ⎜ ε&ik − ε&ll δ ik ⎟ .
(6.10.2)
Здесь тензор напряжений σ~ik , зависящий от скоростей деформации, называют
тензором неупругих напряжений, где ε&ik есть тензор скоростей деформаций и
равен
∂υ
1 ⎛ ∂υ ∂υ ⎞
ε&ik = ⎜⎜ i + k ⎟⎟, ε&ll = l .
(6.10.3)
∂xl
2 ⎝ ∂xk ∂xi ⎠
Тензор неупругих напряжений σ~ можно записать в следующем
ik
эквивалентном виде:
σ~ik = ζ
⎛ ∂υ ∂υ 2 ∂υl ⎞
∂υ l
δ ik + η ⎜⎜ i + k −
δ ik ⎟⎟.
x
x
x
3
∂xl
∂
∂
∂
⎝ k
⎠
i
l
(6.10.4)
В таком виде тензор σ~ik называют тензором вязких напряжений. В определении
(6.10.4) ζ – коэффициент объёмной вязкости; η – коэффициент динамической
(или сдвиговой) вязкости.
Очевидно, что тензор вязких напряжений также является симметричным
тензором. Второе слагаемое в (6.10.4) представляет собой бездивергентный
тензор. Линейную зависимость тензора напряжений σ ik от тензора деформации
ε ik называют законом Гука. Линейную же зависимость (6.10.4) тензора вязких
напряжений σ~ik от тензора скоростей деформации ε&ik называют законом НавьеСтокса. Из (6.10.4) легко получить формулу Ньютона (6.10.1), если полагать,
что скорость частиц среды, нормальная пластинке, равна нулю.
64
6.11. МОДЕЛИ СПЛОШНЫХ СРЕД
В общем случае движения сплошной среды внутренние напряжения,
возникающие в ней, должны складываться из упругих и неупругих напряжений,
т. е. общий тензор напряжений ∑ ik должен иметь вид:
∑ ik = σ ik +σ~ik ,
⎛
⎞
∑ ik = kε ll δ ik + 2μ ⎜ ε ik − ε ll δ ik ⎟ − 3αk (T − T0 )δ ik +
⎝
1
3
⎠
(6.11.1)
⎛ ∂υ ∂υ
⎞
∂υ
2 ∂υ l
δ ik ⎟⎟ + ζ l δ ik .
+ η ⎜⎜ i + k −
∂xl
⎝ ∂xk ∂xi 3 ∂xl
⎠
Таким образом, в самом общем случае среда характеризуется с
кинематической точки зрения пятью феноменологическими коэффициентами
(α , k , μ , η , ζ ) и при решении фундаментальной системы уравнений необходимо
учитывать все слагаемые в общем тензоре напряжений ∑ ik (6.11.1). Однако в
такой общей постановке ни одна задача ещё не была решена в силу
чрезвычайной математической сложности. Для каждой конкретной задачи или
класса задач приходится делать разумные упрощающие предположения,
которые облегчают их решение.
Опыт подсказывает, что все сплошные среды можно разделить на три
существенно отличающихся друг от друга класса: газы, жидкости и твёрдые
тела. Не касаясь различий в характере молекулярного движения в этих средах,
определим эти различия в их феноменологическом поведении.
6.11.1. Твердое тело
В подавляющем числе задач, имеющих практическое значение, твёрдое
тело можно характеризовать как среду, в которой деформации подчиняются
закону Гука ( k ≠ 0, μ ≠ 0) , а скорости деформации малы (ε&ik << 1) , т. е. в этой
среде можно пренебречь вязкими напряжениями (σ~ = 0) . Такие задачи
ik
составляют предмет теории упругости (растяжение, изгиб, кручение стержней,
пластинок, оболочек и т. д.). Второй характерной особенностью твёрдого тела в
обычном понимании является то, что твёрдое тело может быть подвергнуто как
сжатию, так и растяжению ( σ ll > 1 и σ ll < 1), а относительное изменение объёма
при деформации мало (εll = ΔV / V << 1). Если при решении задачи возникает
необходимость учёта вязкостных свойств твёрдого тела, то требуется учитывать
в общем тензоре напряжений cлагаемые, зависящие от скоростей деформаций, а
это уже предмет новой науки – реологии или её разделов – теории
пластичности, ползучести (деформирование за пределом упругости –
прокатка, штамповка).
65
6.11.2. Жидкость
Наиболее характерное физическое свойство сплошной среды, которую
обычно называют жидкостью, заключается в чрезвычайно лёгком изменении её
формы. Вода, налитая в сосуд, принимает форму сосуда. Если наклонить сосуд,
то можно изменить форму жидкости, причём без видимых усилий.
Следовательно, можно полагать, что для такой среды модуль сдвига,
отвечающий за изменение формы среды, очень мал или вообще равен нулю.
Таким образом, для жидкости k ≠ 0, μ = 0, σ~ik ≠ 0 . Следует отметить, что
жидкость, как и твёрдое тело, может быть как сжата, так и растянута, хотя её
прочность на растяжение значительно меньше прочности обычных твёрдых тел.
Поэтому в большинстве задач предполагается, что ε ll < 0 , т. е. жидкость может
быть только сжата, но не растянута. Относительное изменение объёма при
сжатии, как и для твёрдых тел, также невелико – ε ll << 1 .
6.11.3. Газы
Газы, как и жидкости, легко изменяют свою форму. Поэтому их можно
рассматривать как среду с исчезающе малым модулем сдвига, т. е.
k ≠ 0, μ = 0, σ~ik ≠ 0 . В отличие от жидкостей газы не могут быть растянуты
принципиально, поэтому для газов ε ll < 0 . В отличие от жидкостей и твёрдых
тел газы значительно изменяют свой объём при изменении давления (в
соответствии с уравнением состояния PV0 = RT ). Твёрдые тела и жидкости в
большинстве практических задач можно считать несжимаемыми ( ε ll = 0 ), а газы
являются сжимаемыми.
Как и для жидкостей, для газов модуль сдвига равен нулю ( μ = 0 ).
Поэтому при постоянной температуре тензор напряжений σ ik согласно (5.2.3)
ΔV
P
равен σ ik = kε llδ ik . Но в соответствии с (5.2.5) ε ll =
= − . Поэтому тензор
V
k
напряжений σ ik имеет только три одинаковых диагональных элемента, равных
P , т. е. σ ik = − Pδ ik . Из этого соотношения следует, что в жидкостях и газах
давление изотропно.
6.11.4. Релаксация напряжений
Приведённое выше деление сплошных сред на газы, жидкости и твёрдые
тела весьма условно, границы такого деления в существенной мере зависят от
соотношения между временем действия τ f внешних сил, прилагаемых к среде,
и временем релаксации τ p внутренних напряжений в деформируемом теле.
После деформации среды возникающие внутри неё напряжения
релаксируют, т. е. исчезают с некоторой скоростью. Релаксация
сопровождается, как правило, некоторым необратимым изменением в среде
66
(остаточные деформации, изменение объёма и т. д.). После релаксации
внутренних напряжений и снятия внешних сил среда, вообще говоря, не
возвратится в исходное недеформированное состояние.
Если время τ f действия внешних сил много меньше времени τ р
релаксации внутренних напряжений, т.е. τ f << τ p , то любая среда ведёт себя
как твёрдое тело. Та же самая вода при быстром воздействии на неё внешних
сил может рассматриваться как твёрдое тело, обладающее определенным
модулем сдвига (например, удар о поверхность воды).
Если же время τ f воздействия внешних сил много больше времени τ p
релаксации внутренних напряжений
τ f >> τ p , то любая среда может
рассматриваться как маловязкая жидкость с модулем сдвига, равным нулю.
Изучение движения таких жидкостей составляет предмет гидродинамики. Такие
жидкости ещё называют ньютоновскими жидкостями.
Например, битум или смола при быстром воздействии внешней силы
ведут себя как твёрдое тело (рассыпаются при ударе), а при медленном
(постоянном) приложении внешних сил растекаются по поверхности или
принимают форму сосуда, в который были положены куски битума, т. е. ведут
себя как жидкость. Даже стальной стержень при растяжении силой,
вызывающей в нем заведомо только упругие деформации, с течением времени
«течет» и необратимо удлиняется, особенно при повышенных температурах
(явление ползучести металла).
Таким образом, выбор модели сплошной среды при решении конкретной
задачи зависит от соотношения между временами воздействия на неё внешних
сил и времени релаксации внутренних напряжений. Одна и та же среда в
различных задачах может рассматриваться и как твёрдое тело, и как жидкость.
Учитывая вышесказанное, полный тензор напряжений ∑ ik в
гидродинамике для ньютоновских жидкостей и газов записывают в виде
⎛ ∂υ
∂υ
2 ∂υ
⎞
∂υ
l
δ ik ⎟⎟ + ζ l δ ik .
∑ ik = − Pδ ik + η ⎜⎜ i + k −
∂xl
⎝ ∂xk ∂xi 3 ∂xl
⎠
(6.11.2)
6.12. УПРУГИЕ ВОЛНЫ
Рассмотрим одну из задач теории упругости – распространение в
упругой среде малых возмущений. Если распространение этих возмущений в
среде в виде некоторого волнового процесса происходит достаточно быстро, то
можно полагать, что деформации в каждом элементе среды совершаются
адиабатически без теплообмена с окружающими частицами. Тогда все
встречающиеся модули в соответствующих формулах следует полагать
67
адиабатическими. Пренебрегая действием массовых сил, запишем уравнение
движения (6.9.1) в виде
ρ
∂υ i
∂υ ∂σ ik
+ ρυ k i =
.
∂t
∂xk
∂xk
(6.12.1)
Будем считать, что скорости частиц среды, которые возбуждаются волной,
малы, и поэтому вторым слагаемым в левой части уравнения можно пренебречь
как величиной второго порядка малости. Далее рассмотрим плоскую волну, т. е.
волну, при распространении которой деформации u точек среды зависят только
от одной координаты x1 и времени t , т. е.
ui = ui ( x1 , t ), υ i =
dui
.
dt
В этом случае уравнение движения (6.12.1) принимает вид
∂ 2ui ∂σ ik
ρ 2 =
.
∂t
∂xk
(6.12.2)
Здесь компоненты тензора напряжений σ ik определяются законом Гука (5.2.3)
для адиабатического деформирования. Поскольку компоненты вектора
смещения определяются только координатой x1 , то в законе Гука для компонент
тензора напряжений сохраняются только слагаемые, которые содержат
компоненты тензора деформаций, зависящие только от координаты х1. Ими
являются следующие компоненты тензора деформаций
ε 11 =
∂u
∂u
∂ u1
, ε 21 = 2 , ε 31 = 3 .
∂ x1
∂x1
∂x1
Поэтому из уравнения (6.12.2) следуют уравнения
2
∂ 2 u1
2 ∂ u1
= cl
,
∂x12
∂t 2
cl2 =
2
∂ 2u 2
2 ∂ u2
= ct
,
∂t 2
∂x12
2
∂ 2 u3
2 ∂ u3
= ct
,
∂t 2
∂ x12
(6.12.3)
μ
1⎛
4 ⎞
2
⎜ k ад + μ ⎟ , ct = .
ρ
3 ⎠
ρ⎝
Уравнения (6.12.3) представляют собой обычные волновые уравнения,
описывающие распространение малых деформационных возмущений в виде
плоской волны. Из уравнений следует, что плоская волна представляет собой по
существу две независимо распространяющиеся волны с различными
скоростями cl и ct . Причём cl есть скорость распространения продольной
волны, в которой смещение точек u1 происходит вдоль оси x1 , а ct есть
скорость распространения поперечной волны, в которой смещения u2 и u3
перпендикулярны оси x1 .
68
Используя связь (5.3.8) модулей всестороннего сжатия k и сдвига μ с
модулем Юнга E и коэффициентом Пуассона σ , можно скорости cl и ct
определить соотношениями:
cl2 =
E (1 − σ )
,
ρ (1 + σ )(1 − 2σ )
ct2 =
E
.
2 ρ (1 + σ )
(6.12.4)
Для поперечных волн смещение элементов объёма наблюдается вдоль
осей x2 и x3 , т. е. u2 = u2 ( x1 ), u3 = u3 ( x1 ) и u1 = 0 . Согласно (2.3.5) относительное
изменение объёма в этом случае равно
∂u ∂u ∂u
ΔV
= ε ii = div u = 1 + 2 + 3 ≡ 0.
V
∂x1 ∂x2 ∂x3
Таким образом, поперечные волны при прохождении через частицы среды не
изменяют их объём. Поэтому их называют сдвиговыми волнами.
Для продольной волны u1 = u1 ( x1 ), u 2 ( x1 ) = u3 ( x1 ) = 0 , тогда
ΔV ∂u1
=
≠ 0.
∂x1
V
Прохождение продольной волны через среду сопровождается адиабатическим
изменением объёма. Продольные волны называют волнами сжатия.
Отношение скоростей распространения продольных и поперечных волн
равно
2(1 − σ )
cl
.
=
1 − 2σ
ct
Ранее отмечалось, что коэффициент Пуассона для реальных сред изменяется в
в
интервале 0 < σ < 1 2 , поэтому отношение скоростей изменяется
пределах
⎛ cl ⎞
⎛c ⎞
⎜⎜ ⎟⎟ = 2 , ⎜⎜ l ⎟⎟ = ∞.
⎝ ct ⎠ min
⎝ ct ⎠ max
Это свойство распространения упругих возмущений в виде плоской и
поперечной волн с различными скоростями используется в сейсмологии и
гравитационной разведке. Действительно, пусть две сейсмические станции
приняли сигналы прохождения продольной волны, а затем поперечной. Пусть
промежуток времени между сигналами на одной станции равен Δt1 . Тогда его
можно определить следующим образом. Если землетрясение или взрыв
произошел на расстоянии l1 от этой станции, то время прибытия на неё
продольной и поперечной волн будет равно:
69
tl =
l1
,
cl
tt =
l1
.
ct
Тогда измеряемый промежуток времени между сигналами на первой станции
будет равен
⎛1 1⎞
Δt1 = tt − tl = l1 ⎜⎜ − ⎟⎟ .
⎝ ct cl ⎠
Из этой формулы можно вычислить расстояние от первой станции до места, где
произошел взрыв или землетрясение:
l1 = Δt1
cl ct
.
cl − ct
Аналогично можно вычислить расстояние l2 от второй станции:
l 2 = Δt 2
cl ct
.
cl − ct
Проведя на географической карте окружности радиусами l1 и l2 вокруг станций,
в точках пересечения окружностей можно определить координаты места взрыва
или землетрясения. Для того чтобы уточнить, в какой именно одной из двух
точек произошел взрыв, необходимы данные, по крайней мере, ещё одной
станции.
Очевидно, что для таких расчётов нужно знать упругие свойства земной
коры. Эти данные получают в результате специальных геофизических
исследований при помощи, например, взрывов, когда расстояния между
точками взрыва (их координаты на местности) заведомо известны.
На этом же принципе основаны гравитационные методы разведки.
Измеряя скорости прохождения волн, создаваемых искусственными взрывами,
можно судить о плотности вещества, в котором они распространяются или от
которого они отражаются, а также знать и упругие свойства этой среды, т. е.
предположительно судить о физической природе этой среды.
Опыты по измерению скорости распространения продольных и
поперечных волн могут также служить способом определения упругих констант
различных материалов при различных условиях. Для жидкостей и газов с
исчезающе малым модулем сдвига мала и скорость распространения сдвиговых
или поперечных волн и в пределе можно полагать, что сдвиговые волны в
жидкостях и газах невозможны.
В заключение приведем таблицу примерных значений упругих констант
некоторых веществ.
70
Таблица
.Модуль Юнга, модуль сдвига, коэффициент Пуассона и скорости распространения
продольных и поперечных волн при температуре 200С
для различных материалов
Материал
Размерность
Е
кг/мм2
Сталь
Алюминий
Стекло
Каучук
21 000
7 000
5 600
0.8
μ
cl
ct
кг/мм2
σ
-
м/с
м/с
83 000
2 600
2 200
0
0.25
0.34
0.25
0.47
5 700
6 300
5 200
720
3 300
3 100
2 900
27
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Ландау Л.Д. Теория упругости. / Л.Д. Ландау, Е.М. Лифшиц. М. :
Наука, 1965. 204 с.
2. Харрисон У. Теория твердого тела / У. Харрисон. М. : Мир, 1974.
616 с.
3. Давыдов А.С. Теория твердого тела / А.С. Давыдов. М. : Наука, 1979.
640 с.
4. Павлов П.В. Физика твердого тела / П.В. Павлов. А.Ф. Хохлов. М. :
Высшая школа, 2000. 494 с.
71
ПРИЛОЖЕНИЕ. ПЛАСТИЧЕСКИЕ ДЕФОРМАЦИИ
П 1. ПРЕДМЕТ РЕОЛОГИИ
П 1.1. ВЯЗКОУПРУГОСТЬ
Реология (от греч. ρέος, «течение, поток» и - логия) – раздел физики,
изучающий деформации и текучесть вещества, которые возникают под
действием внешних сил или при изменении температуры, вызывающих в
веществе вязкоупругие силы [П 1 – П 4].
Вязкоупругость – механическое свойство вещества быть как упругим, так
и вязким. Развитие теории вязкоупругости связано с широким использованием
полимерных материалов. Вязкоупругие свойства проявляются, например, в том,
что внезапно приложенное и поддерживаемое неизменным напряженное
состояние вызывает мгновенную деформацию, сопряженную с упругим
откликом, вслед за чем следует процесс вязкого течения, который может быть
ограниченным и неограниченным во времени. При этом поведение вещества
определяется не только текущим напряженным состоянием, но и всеми
прошлыми состояниями, т. е. вещество обладает свойством, которое называют
эффектом памяти или динамической памятью. Не следует путать это свойство с
эффектом памяти формы. Превалирование упругих или вязких свойств
определяется продолжительностью внешнего воздействия или числом Деборы,
который является критерием подобия в реологии и показывает степень
текучести материала в эксперименте, определяемой коэффициентом вязкости
материала.
Число Деборы определяется как
t
(П. 1)
De = c ,
tp
где tc – характерное время релаксации материала; tp – характерное время
наблюдения или воздействия внешней силы. При временах наблюдения,
превышающих характерное время релаксации, материал течет, то есть чем
меньше число Деборы, тем текучее материал в рамках проводимого
эксперимента. Критерий был введен М. Рейнером [П1.1], он же и придумал
название, связанное с цитатой из песни Деворы (Суд 5:5): «горы таяли от лица
Господа». Критерий Деборы применим к жидкостям Максвелла (или
неньютоновским), но не применим к жидкостям Кельвина–Фойгта (или
ньютоновским жидкостям, у которых модуль сдвига µ = 0).
72
Для жидкостей Максвелла доказана разрешимость в целом начальнокраевой задачи для нестационарной квазилинейной системы, описываемой
уравнением
L
⎛∂
∂ ⎞⎛
∂ l υ ⎞ L −1 ∂ mυ
⎜⎜ + xk
⎟⎟⎜ υ + ∑ λl l ⎟ − ∑ κ m m + ∇p = f ,
l =1
∂
t
∂
x
∂t ⎠ m=0 ∂t
⎝
k ⎠⎝
div = 0, L = 1,2, …
(П. 2)
Это уравнение описывает течение линейных вязкоупругих жидкостей с
конечным числом дискретно распределенных времен релаксации {λl},
(l = 1,2…L) и времен запаздывания { κ 0−1 , κ ml } (m = 1, 2,…L – 1) для обобщенных
жидкостей Максвелла [П 5].
П 1.2. ПОЛИМЕРНЫЕ ВЕЩЕСТВА
Как отмечалось выше, теория вязкоупругости связана с широким
использованием полимерных материалов, которые в зависимости от величины
внешнего силового или температурного воздействия могут быть либо
жидкостями, либо твердыми телами различной кристаллической структуры и
формы.
Полимеры (греч. πολύ- – много; μέρος – часть) – неорганические и
органические, аморфные и кристаллические вещества, получаемые путём
многократного
повторения
различных
групп
атомов,
называемых
«мономерными звеньями», соединённых в длинные макромолекулы
химическими
или
координационными
связями.
Полимер
–
это
высокомолекулярное соединение: количество мономерных звеньев в полимере
(степень полимеризации) должно быть достаточно велико. Во многих случаях
количество звеньев может считаться достаточным, чтобы отнести молекулу к
полимерам, если при добавлении очередного мономерного звена молекулярные
свойства не изменяются. Как правило, полимеры – вещества с молекулярной
массой от нескольких тысяч до нескольких миллионов.
Если связь между макромолекулами осуществляется с помощью слабых
сил Ван-Дер-Вальса, они называются термопласты, если с помощью
химических связей – реактопласты. К линейным полимерам относится,
например, целлюлоза; к разветвленным, например, амилопектин, есть полимеры
со сложными пространственными трёхмерными структурами.
В строении полимера можно выделить мономерное звено –
повторяющийся структурный фрагмент, включающий несколько атомов.
Полимеры состоят из большого числа повторяющихся группировок (звеньев)
одинакового строения, например поливинилхлорид (—СН2—CHCl—)n, каучук
натуральный и др. Высокомолекулярные соединения, молекулы которых
содержат несколько типов повторяющихся группировок, называют
73
сополимерами или гетерополимерами.
Полимер образуется из мономеров в результате реакций полимеризации
или поликонденсации. К полимерам относятся многочисленные природные
соединения: белки, нуклеиновые кислоты, полисахариды, каучук и другие
органические вещества. В большинстве случаев понятие относят к
органическим соединениям, однако существует и множество неорганических
полимеров. Большое число полимеров получают синтетическим путём на
основе простейших соединений элементов природного происхождения путём
реакций полимеризации, поликонденсации и химических превращений.
Названия полимеров образуются из названия мономера с приставкой поли-:
полиэтилен, полипропилен, поливинилацетат и т. п.
Благодаря
ценным
свойствам
полимеры
применяются
в
машиностроении, текстильной промышленности, сельском хозяйстве и
медицине, автомобиле- и судостроении, авиастроении, в быту (текстильные и
кожевенные изделия, посуда, клей и лаки, украшения и другие предметы). На
основании высокомолекулярных соединений изготовляют резины, волокна,
пластмассы, пленки и лакокрасочные покрытия. Все ткани живых организмов
представляют высокомолекулярные соединения.
П 1.3. ПЛАСТИЧЕСКИЕ ДЕФОРМАЦИИ. ДИСЛОКАЦИИ И ВАКАНСИИ
Любой кристалл или агрегат кристаллов, при определённых условиях,
может быть пластически деформирован. Под действием на кристалл внешней
силы в объёме кристалла появляются напряжения, которые снимаются
дефектами. Если сила превышает некий порог, то происходит хрупкое
разрушение объекта.
Пластическая деформация кристаллов реализуется посредством
направленного движения в нём дислокаций и вакансий [П 6].
Дислокация – это линейный дефект кристаллической структуры твёрдых
тел. Основная геометрическая характеристика дислокаций – вектор Бюргерса.
Если в идеальном кристалле провести замкнутый контур, а затем попытаться
провести такой же контур вокруг области с дислокацией, то контур будет
разорван. Вектор, который нужно провести для замыкания этого контура, и есть
вектор Бюргерса дислокации. Он характеризует величину и направление сдвига
атомных плоскостей, приводящего к образованию дислокации. В зависимости
от угла φ между вектором Бюргерса и линией дислокации различают
дислокации винтовые (φ = 0), краевые (φ = 90°) и смешанные (произвольный
угол – φ). Смешанные дислокации могут быть разложены на краевую и
винтовую компоненты. Образование краевой дислокации можно представить
74
как результат удаления из кристалла одной кристаллической полуплоскости.
Линия, отделяющая дефектную область кристалла от бездефектной, называется
линией дислокации. Простейшая наглядная модель краевой дислокации —
книга, у которой от одной из внутренних страниц оторвана часть (рис. П. 1, 2).
Если страницы книги уподобить атомным плоскостям, то край оторванной
части страницы моделирует линию дислокации (рис. П. 1).
Точечный дефект кристаллической решётки представляет собой
отсутствие атома в узле решётки. Выделяется два механизма его образования в
кристалле:
Рис. П. 1. Схематическое изображение
краевой дислокации. Вектор Бюргерса
обозначен чёрным цветом
Рис. П. 2. Схематическое изображение
винтовой дислокации
а) по Шоттки – образование вакансии в поверхностном слое атомов,
когда атом из узла решётки выходит на слой выше поверхностного, после чего
вакансия может уйти вглубь кристалла;
б) по Френкелю – одновременное образование вакансии и
междоузельного атома, когда атом, вследствие теплового движения, покидает
своё место в решётке и оказывается в междоузлии.
П 1.4. ЭФФЕКТ ПАМЯТИ ФОРМЫ
С пластическими деформациями связан известный эффект памяти
формы – явление возврата к первоначальной форме при нагреве,
наблюдающееся у некоторых материалов после предварительной деформации.
Одно из базовых восприятий людьми явлений внешнего мира – это
стойкость и надежность металлических
изделий
и
конструкций,
стабильно сохраняющих свою функциональную форму продолжительное
75
время, если, конечно, они не
подвергаются закритическим воздействиям. Однако, казалось бы, вопреки
здравому смыслу, существует ряд
материалов, металлических сплавов,
нагреве,
после
которые
при
деформации,
предварительной
демонстрируют явление возврата к
первоначальной форме, т. е. эти
металлы,
не
являясь живыми
Рис. П. 3. Эффект памяти формы
существами, обладают
особым
свойством, позволяющим им проявлять своеобразную память.
Проявление эффекта памяти формы заключается в следующем. Если
прямую проволоку (П. 3.1) вначале изогнуть (П. 3.2), затем нагреть (П. 3.3), то
после нагревания она станет прямой (П. 3.4). После остывания она примет
прежнюю изогнутую форму (П. 3.2). Почему так происходит?
Физическая сущность эффекта
памяти
формы
заключается
в
следующем. В исходном состоянии в
материале существует определенная
структура. На рис. П. 4.1 она
обозначена правильными квадратами.
При деформации (в данном случае
изгибе на рис. П. 4.2) внешние слои
материала
вытягиваются,
а
внутренние сжимаются (средние
остаются без изменения). Эти
вытянутые структуры – мартенситные
пластины,
что
не
является
необычным
для
металлических
сплавов. Необычным является то, что
в материалах с памятью формы
мартенсит термоупругий.
При
нагреве
начинает
проявляться термоупругость мартенситных пластин, т.е. в них возникают
Рис. П. 4. Физическая ущность эффекта
внутренние напряжения, которые
памяти формы
стремятся вернуть структуру в
исходное состояние (П. 4.3), т.е. сжать вытянутые пластины и растянуть
76
сплюснутые. Поскольку внешние вытянутые пластины сжимаются, а
внутренние сплюснутые растягиваются, материал в целом проводит
автодеформацию в обратную сторону и восстанавливает свою исходную
структуру, а вместе с ней и форму (рис. П. 4.4).
Мартенситное превращение (или полиморфное превращение), при
котором изменение взаимного расположения составляющих кристалл атомов
(или молекул) происходит путём их упорядоченного перемещения, причем
относительные смещения соседних атомов малы по сравнению с
междуатомным расстоянием. Перестройка кристаллической решётки в
микрообластях обычно сводится к деформации её ячейки, и конечная фаза
мартенситного превращения может рассматриваться как однородно
деформированная исходная фаза. Величина деформации мала (порядка 1 –
10 %) и соответственно мал, по сравнению с энергией связи в кристалле,
энергетический барьер, препятствующий однородному переходу исходной
фазы в конечную. Необходимое условие мартенситного превращения, которое
развивается путем образования и роста областей более стабильной фазы в
метастабильной, – сохранение упорядоченного контакта между фазами.
Упорядоченное строение межфазных границ при малости барьера для
однородного фазового перехода обеспечивает их малую энергию и высокую
подвижность. Как следствие, избыточная энергия, необходимая для зарождения
кристаллов новой фазы (мартенситных кристаллов), мала и при некотором
отклонении от равновесия фаз становится сопоставимой с энергией дефектов,
присутствующих в исходной фазе. Поэтому зарождение мартенситных
кристаллов происходит с большой скоростью и может не требовать тепловых
флуктуаций. Вследствие воздействия образовавшейся фазы на исходную фазу
энергетический барьер для перемещения границы фаз существенно меньше,
чем для однородного перехода; при небольших отклонениях от равновесия он
исчезает, поэтому кристалл растет со скоростью порядка звуковой и без
тепловой активации (превращение возможно при температурах, близких к
абсолютному нулю).
Мартенситные превращения обнаружены во многих кристаллических
материалах: чистых металлах, многочисленных сплавах, ионных, ковалентных
и молекулярных кристаллах. Наиболее полно изучены мартенситные
превращения в сплавах на основе железа, в частности в связи с закалкой стали.
Большие перспективы практического применения имеют возможность
большого обратимого формоизменения при мартенситных превращениях
(например, создание «сверхупругих» сплавов и изделий, восстанавливающих
первоначальную форму при нагреве после пластической деформации – «эффект
памяти»), а также связь мартенситных превращений с появлением
сверхпроводящих свойств в некоторых металлах. Мартенситные превращения
(часто в сочетании с диффузионным перераспределением компонентов и
изменением атомного порядка) составляют основу многочисленных
структурных превращений, благодаря которым с помощью термической и
механической обработки осуществляется направленное изменение свойств
77
кристаллических материалов. Значительный вклад в изучение мартенситных
превращений внесли работы советских учёных (Г.В. Курдюмов и его школа)
[П 7].
П 2. ХАРАКТЕРИСТИКИ ЭФФЕКТА ПАМЯТИ ФОРМЫ
Эффект памяти формы характеризуется двумя величинами:
• маркой сплава со строго выдержанным химическим составом;
• температурами мартенситных превращений.
В процессе проявления эффекта памяти формы участвуют мартенситные
превращения двух видов – прямое и обратное. Соответственно каждое из них
проявляется в своем температурном интервале: МН и МК – начало и конец
прямого мартенситного превращения при деформации; АН и АК – начало и
конец обратного мартенситного превращения при нагреве (рис. П. 5).
Температуры мартенситных превращений являются функцией как марки
сплава (системы сплава), так и его химического состава. Небольшие изменения
химического состава сплава (намеренные или как результат брака) ведут к
сдвигу этих температур (см . рис. П. 6). Отсюда следует необходимость
строгой
выдержки
химического
состава сплава для однозначного
функционального
проявления
эффекта
памяти
формы,
что
переводит
металлургическое
производство в сферу высоких
технологий.
Эффект
памяти
формы
проявляется несколько миллионов
циклов;
его
можно
усиливать
предварительными
различного
Рис. П. 5. Прямое и обратное мартенситное времени термообработками.
превращение для сплава TiNi(50%)
Возможны
реверсивные
эффекты памяти формы, когда
материал при одной температуре
«вспоминает» одну форму, а при
другой температуре – другую. Чем
выше
температура
обратного
мартенситного превращения, тем в
меньшей степени выражен эффект
Рис. П. 6. Изменение зоны температур
памяти формы. Например, слабый
мартенситных превращений для различных эффект памяти формы наблюдается в
сплавов TiNi
сплавах системы Fe-Ni (5–20 %Ni),
78
у которых температуры обратного мартенситного превращения 200–400˚C.
Другим явлением, тесно связанным с эффектом памяти формы, является
сверхупругость – это свойство материала, подвергнутого нагружению до
напряжения, значительно превышающего предел текучести, полностью
восстанавливать первоначальную форму после снятия нагрузки.
Сверхупругое поведение на порядок выше упругого. Сверхупругость
наблюдается в области температур между началом прямого мартенситного
превращения и концом обратного.
П 3. МАТЕРИАЛЫ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ
Лидером среди материалов с памятью формы по применению и по
изученности является никелид титана – это интерметаллид эквиатомного
состава с 55 мас.%Ni. Температура плавления 1240–1310˚C, плотность
6,45 г/см3. Исходная структура никелида титана – стабильная объемноцентрированная кубическая решетка типа CsCl, при деформации претерпевает
термоупругое мартенситное превращение с образованием фазы низкой
симметрии.
Другое название этого сплава, принятое за рубежом, – нитинол,
происходит от аббревиатуры NiTiNOL, где NOL – это сокращенное название
Лаборатории морской артиллерии США, где этот материал был разработан в
1962 году. Элемент из никелида титана может исполнять функции как датчика,
так и исполнительного механизма.
Никелид титана обладает:
1. Превосходной коррозионной стойкостью.
2. Высокой прочностью.
3. Хорошими характеристиками формозапоминания. Высокий
коэффициент восстановления формы и высокая восстанавливающая сила.
Деформация до 8 % может полностью восстанавливаться. Напряжение
восстановления при этом может достигать 800 МПа.
4. Хорошая совместимость с живыми организмами.
5. Высокая демпфирующая способность материала.
Недостатки никелида титана:
1. Из-за наличия титана сплав легко присоединяет азот и кислород.
Чтобы предотвратить реакции с этими элементами при производстве, надо
использовать вакуумное оборудование.
2. Затруднена обработка при изготовлении деталей, особенно
резанием (оборотная сторона высокой прочности).
3. Высокая цена. В конце XX века он стоил чуть дешевле серебра.
При современном уровне промышленного производства изделия из
никелида титана (наряду со сплавами системы Cu-Zn-Al) нашли широкое
79
практическое применение и рыночный сбыт.
На конец XX века эффект памяти формы был обнаружен более чем у
20-ти сплавов. Кроме никелида титана эффект памяти формы обнаружен в
системах:
•
Au-Cd. Разработан в 1951 году в Иллинойском университете,
США. Один из пионеров материалов с памятью формы.
•
Cu-Zn-Al. Наряду с никелидом титана имеет практическое
применение. Температуры мартенситных превращений в интервале от −170 до
100˚C. Преимущества (по сравнению с никелидом титана): можно выплавлять в
обычной атмосфере. легко обрабатывается резанием, цена – в пять раз дешевле.
Недостатки: хуже по характеристикам формозапоминания, а также по
механическим и коррозионным свойствам. При термообработке легко
происходит укрупнение зерна, что приводит к снижению механических
свойств; проблемы стабилизации зерна в порошковой металлургии.
•
Cu-Al-Ni. Разработан в университете города Осака, Япония.
Температуры мартенситных превращений в интервале от 100 до 200˚C.
•
Fe-Mn-Si. Сплавы этой системы наиболее дешевые.
•
Fe-Ni, Cu-Al, Cu-Mn, Co-Ni, Ni-Al и др.
Некоторые исследователи полагают, что эффект памяти формы
принципиально возможен у любых материалов, претерпевающих мартенситные
превращения, в том числе и у таких чистых металлов, как титан, цирконий и
кобальт.
Производство никелида титана. Плавка происходит в вакуумногарнисажной печи или в электродуговой печи с расходуемым электродом в
защитной атмосфере (гелий или аргон). Шихтой в обоих случаях служит
йодидный титан или титановая губка, спрессованная в брикеты, и никель марки
Н-0 или Н-1. Для получения равномерного химического состава по сечению и
высоте слитка рекомендуется двойной или тройной переплав. При выплавке в
дуговой печи рекомендуется сила тока 1,2 кА, напряжение 40 V, давление гелия
53 МПа.
Оптимальный режим остывания слитков с целью предотвращения
растрескивания – охлаждение с печью (не больше 10˚ в секунду). Удаление
поверхностных дефектов – обдирка наждачным кругом. Для более полного
выравнивания химического состава по объёму слитка проводят гомогенизацию
при температуре 950–1000˚C в инертной атмосфере.
Применение материалов с эффектом памяти формы.
На рис. П. 7 представлен внешний вид соединительной втулки, впервые
разработанной и внедренной фирмой «Рейхем Корпорейшен», США, для
соединения труб гидравлической системы военных самолетов. В истребителе
более 300 тысяч таких соединений, но ни разу не поступило сообщений об их
поломках. Её функциональными элементами являются внутренние выступы.
80
Применение
таких
втулок
заключается в следующем (см. рис. П. 8):
1. Втулка в исходном состоянии
при температуре 20˚C имеет форму
П. 8.1.
2. Втулка помещается в криостат,
где при температуре −196˚C плунжером
развальцовываются внутренние выступы
(рис. П. 8.2).
3. Холодная втулка становится
изнутри гладкой (рис. П. 8.3).
4. Специальными клещами втулку
вынимают из криостата и надевают на
концы соединяемых труб (рис. П. 8.4).
5. Комнатная температура
Рис. П. 7. Соединительные втулки из
является температурой нагрева для
никелида титана
данного состава сплава.
Дальше все происходит «автоматически». Внутренние выступы «вспоминают»
свою
исходную
форму,
выпрямляются и врезаются во внешнюю
поверхность
соединяемых
труб
(рис. П. 8.5.).
вакуумноПолучается
прочное
плотное соединение, выдерживающее
давление до 800 атм. По сути дела этот
тип соединения заменяет сварку, и
предотвращает
такие
недостатки
сварного
шва,
как
неизбежное
разупрочнение металла и накопление
дефектов в переходной зоне между
металлом и сварным швом. Кроме того,
этот метод соединения хорош для
финального соединения при сборке
конструкции, когда сварка из-за
переплетения узлов и трубопроводов
становится трудно доступной.
Рис. П. 8. Этапы соединения
Эти втулки используются в
двух труб втулкой
авиационной, космической, автотехнике.
Этот метод также используется для соединения и ремонта труб подводных
кабелей.
Использование эффекта памяти формы в медицине:
• Перчатки,
применяемые
в
процессе
реабилитации
и
предназначенные для реактивации групп активных мышц с функциональной
81
недостаточностью, могут быть использованы в межзапястных, локтевых,
плечевых, голеностопных и коленных суставах.
• Противозачаточные спиральки, которые после введения приобретают
функциональную форму под воздействием температуры тела.
• Фильтры для введения в сосуды кровеносной системы. Вводятся в
виде прямой проволоки с помощью катетера, после чего они приобретают
форму фильтров, имеющих заданную локацию.
• Зажимы для защемления слабых вен.
• Искусственные
мышцы, которые приводятся в действие
электрическим током.
• Крепежные штифты, предназначенные для фиксации протезов на
костях.
• Искусственное удлинительное приспособление для так называемых
растущих протезов у детей.
• Замещение хрящей головки бедренной кости. Заменяющий материал
становится самозажимным под действием сферической формы (головки
бедренной кости).
• Стержни для коррекции позвоночника при сколиозе.
• Временные зажимные фиксирующие элементы при имплантации
искусственного хрусталика.
• Оправа для очков. В нижней части, где стекла крепятся проволокой.
Пластиковые линзы не выскальзывают при охлаждении. Оправа не
растягивается при протирке линз и длительном использовании. Используется
эффект сверхупругости.
• Ортопедические имплантанты.
• Проволока (ортодонтическая дуга) для исправления зубного ряда.
• Имплантаты дентальные (самофиксация расходящихся элементов в
кости).
Использование эффекта памяти формы в тепловой сигнализации:
• Пожарная сигнализация.
• Противопожарные заслонки.
• Сигнальные устройства для ванн.
• Сетевой предохранитель (защита электрических цепей).
• Устройство
автоматического открывания/закрывания окон
теплицах.
• Бойлерные баки тепловой регенерации.
• Пепельница с автоматическим стряхиванием пепла.
• Электронный контактор.
• Система для предотвращения выхлопа газов, содержащих пары
топлива (в автомобилях).
• Устройство для удаления тепла из радиатора.
• Устройство для включения противотуманных фар.
• Регулятор температуры в инкубаторе.
• Ёмкость для мытья теплой водой.
в
82
• Регулирующие клапаны охлаждающих и нагревательных устройств,
тепловых машин.
Другие применения эффекта памяти формы
Фирма «Фокусу Боро», Япония, использует никелид титана в
приводных устройствах самописцев. Входной сигнал самописца преобразуется
в электрический ток, которым нагревается проволока из никелида титана. За
счет удлинения и сокращения проволоки приводится в движение перо
самописца. С 1972 года изготовлено несколько миллионов таких узлов (данные
на конец XX века). Так как механизм привода очень прост, поломки случаются
крайне редко.
• Электронная
кухонная плита конвекционного типа. Для
переключения вентиляции при микроволновом нагреве и нагреве
циркуляционным горячим воздухом используется датчик из никелида титана.
• Чувствительный клапан комнатного кондиционера. Регулирует
направление ветра в продувочном отверстии кондиционера, предназначенного
для охлаждения и отопления.
• Кофеварка. Определение температуры кипения, а также для
включения-выключения клапанов и переключателей.
• Электромагнитный
кухонный комбайн. Нагрев производится
вихревыми токами, возникающими на дне кастрюли под действием магнитных
силовых полей. Чтобы не обжечься, появляется сигнал, который приводится в
действие элементом в виде катушки из никелида титана.
• Электронная сушилка-хранилище. Приводит в движение заслонки
при регенерации обезвоживающего вещества.
• В начале 1985 года формозапоминающие сплавы, исползуемые для
изготовления каркасов бюстгальтеров, стали с успехом завоевывать рынок.
Металлический каркас в нижней части чашечек состоит из проволоки из
никелида титана. Здесь используется свойство сверхупругости. При этом нет
ощущения присутствия проволоки, впечатление мягкости и гибкости. При
деформации (при стирке) легко восстанавливает форму. Сбыт – 1 млн штук в
год. Это одно из первых практических применений материалов с памятью
формы.
• Изготовление разнообразного зажимного инструмента.
• Герметизация корпусов микросхем.
• Высокая
эффективность превращения работы в тепло при
мартенситных превращениях (в никелиде титана) предполагает использование
таких материалов не только как высокодемпфирующих, но и в качестве
рабочего тела холодильников и тепловых насосов.
• Свойство
сверхупругости
используется
для
создания
высокоэффективных пружин и аккумуляторов механической энергии.
• Также используется «эффект памяти» в изготовлении ювелирных
изделий. Например, украшение в виде цветка. При надевании его на шею на
•
83
цепочке лепестки цветка, прислоняясь к телу, раскрываются, обнажая
спрятанный внутри драгоценный камень.
• Эффект памяти используется и иллюзионистами – например, в
фокусе, в котором изогнутый гвоздь сам выпрямляется в руках фокусника или
одного из зрителей.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК П
П 1. Рейнер М. Реология / М. Рейнер. Пер. с англ. М. : Наука, 1965.
224 с.
П 2. Малкин А. Я. Реология. Концепции, методы, приложения /
А.Я. Малкин, А.И. Исаев. М. : Профессия, 2007. 560 с.
П 3. Астарита Дж. Основы гидромеханики неньютоновских жидкостей /
Дж. Астарита, Дж. Маруччи. М. : Мир, 1978. 312 с.
П 4. Виноградов Г.В. Реология полимеров / Г.В. Виноградов. М. : Химия,
1977. 440 c.
П 5. Осколков А.П. К теории жидкостей Максвелла / А.П. Осколков. // Л.
: Наука, Ленинград. отд., 1981/ С. 119–127.
П 6. Виноградов Г .В. Реология полимеров / Г.В. Виноградов. М. :
Химия, 1977. 440 c.
П 7. Курдюмов Г.В. Явления закалки и отпуска стали / Г.В. Курдюмов
М., 1960.
П 8. Хачин В.Н. Память формы / В.Н. Хачин. М. : Знание, 1984. 64 с.
П 9. Лихачев В.А. Эффект памяти формы / В.А. Лихачев, С.Л. Кузьмин,
З.П. Каменцева. Л. : Изд-во ЛГУ, 1987.
П 10. Шишкин С.В. Расчёт и проектирование силовых конструкций на
сплавах с эффектом памяти формы / С.В. Шишкин, Н.А. Махутов.
Ижевск : Науч.-изд. центр «Регулярная и хаотическая динамика»,
2007. 412 с.
П 11. Харт Дж. Теория дислокаций / Дж. Харт, И. Роте. М. : Атомиздат,
1972. 600 с.
84
Учебное издание
Породнов Борис Трифонович
МЕХАНИКА СПЛОШНЫХ СРЕД.
Часть 1. Теория упругости
Редактор
Н .В. Рощина
Компьютерный набор В. А. Дублёных, Д. В. Румянцев
Подписано в печать 30.12.2010
Бумага писчая
Уч. изд. л. 4,1
Плоская печать
Тираж 100 экз.
Формат 60×84 1/16
Усл. печ. л. 4,9
Заказ
Редакционно-издательский отдел УрФУ
620002, г. Екатеринбург, ул. Мира, 19
[email protected]
Ризография НИЧ УрФУ
620002, г. Екатеринбург, ул. Мира, 19
УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
кафедра молекулярной физики
МЕХАНИКА СПЛОШНЫХ СРЕД
РАЗДЕЛ 2 - ИДЕАЛЬНАЯ СРЕДА
КОНСПЕКТ ЛЕКЦИЙ
Екатеринбург 2007
66
СОДЕРЖАНИЕ
7. ИДЕАЛЬНАЯ СРЕДА .......................................................................................... 68
7.1. Уравнения движения для сжимаемой и несжимаемой идеальной
среды ............................................................................................................ 68
7.1.1. Замкнутая система уравнений сохранения для идеальной
среды...................................................................................................... 68
7.1.2. Движение несжимаемой среды ..................................................... 69
7.1.3. Изоэнтропическое движение ......................................................... 70
7.1.4. Граничные и начальные условия ................................................... 71
7.2. Уравнение Бернулли .................................................................................. 72
7.2.1. Потенциальное движение идеальной среды ................................ 72
7.2.2. Линии тока и траектории. Трубка тока ......................................... 73
7.2.3. Скорость истечения идеальной несжимаемой жидкости
из сосуда ................................................................................................ 75
7.2.4. Распределение давления в трубе переменного сечения ............. 75
7.2.5. Кавитация ........................................................................................ 77
7.2.6. Трубка Пито ..................................................................................... 78
7.3. Влияние сжимаемости среды ................................................................... 80
7.4. Вихревое движение .................................................................................... 83
7.4.1. Сохранение циркуляции скорости. Теорема Томсона ................ 83
7.4.2. Вихревая трубка. Теорема Гельмгольца ....................................... 84
7.4.3. Прямолинейная одиночная вихревая нить ................................... 86
7.4.4. Примеры вихревых движений ....................................................... 89
7.5. Потенциальное движение ......................................................................... 91
7.5.1. Потенциал скорости. Граничные условия .................................... 91
7.5.2. Функция тока для плоского движения идеальной среды ........... 93
7.5.3. Свойства функции тока .................................................................. 93
7.6. Некоторые методы решения газодинамических задач для
идеальной жидкости ................................................................................... 95
7.6.1. Метод конформных отображений ................................................. 95
7.6.2. Обтекание плоской пластинки идеальной несжимаемой
жидкостью............................................................................................. 95
7.6.3. Обтекание цилиндра идеальной несжимаемой
жидкостью............................................................................................. 97
7.6.4. Распределение давления на поверхности цилиндра. .................. 99
Парадокс Даламбера ................................................................................. 99
7.7. Суперпозиция потенциальных потоков ................................................. 102
7.7.1. Обтекание бесконечного цилиндра с циркуляцией................... 102
7.7.2. Распределение давления. Подъемная сила................................. 103
7.8. Графоаналитический метод .................................................................... 107
67
7.9. Движение бесконечного цилиндра в идеальной несжимаемой
среде ........................................................................................................... 109
7.9.1. Постановка задачи и методика решения .................................... 109
7.9.2. Распределение давления около движущегося цилиндра ...........111
7.9.3. Сила сопротивления движущегося шара.
Присоединенная масса ...................................................................... 113
7.10. ЧИСЛЕННЫЕ МЕТОДЫ В МЕХАНИКЕ СПЛОШНЫХ
ИДЕАЛЬНЫХ СРЕД ........................................................................................ 116
7.10.2. Краткая характеристика численных методов................................... 117
7.10.2.1. Метод конечных разностей .................................................... 117
7.10.2.2. Метод интегральных соотношений ....................................... 117
7.10.2.3. Метод характеристик ............................................................... 118
7.10.2.4. Метод частиц в ячейках ......................................................... 118
7.10.2.5. Метод конечных элементов ................................................... 119
7.10.2.6. Метод дискретных вихрей ..................................................... 119
7.10.2.7. Статистические методы ......................................................... 120
7.10.3. Основы численных методов .............................................................. 121
7.10.3.1. Задача интерполирования ....................................................... 121
7.10.3.2. Интерполяционный многочлен Лагранжа ............................ 121
7.10.3.3. Погрешность интерполирования ........................................... 122
7.10.4. Вычисление интегралов ..................................................................... 122
7.10.4.1. Квадратурные формулы Ньютона-Котеса ............................. 122
7.10.4.2. Формула трапеций .................................................................. 123
7.10.4.3. Формула Симпсона ................................................................. 123
7.10.5. Численное дифференцирование ....................................................... 124
7.11. ПРИМЕНЕНИЕ МЕТОДА ПОТОКОВ В МЕХАНИКЕ
СПЛОШНЫХ ИДЕАЛЬНЫХ СРЕД .............................................................. 125
7.11.1. Общие замечания ................................................................................ 125
7.11.2. Описание метода потоков................................................................... 126
7.11.3. Конечно – разностные схемы метода потоков ................................. 130
7.11.3.1. Постановка и решение задачи ................................................ 130
7.11.3.2. Обтекание прямоугольного выступа эйлеровым газом ....... 132
7.11.3.3. Этапы вычислительного цикла ............................................... 135
7.11.4. Результаты расчета .............................................................................. 137
ЛИТЕРАТУРА: ................................................................................................. 141
68
7. ИДЕАЛЬНАЯ СРЕДА
Под жидкостью будем понимать как собственно саму жидкость, так и
газ, полагая, что оба эти агрегатных состояния вещества представляют собой
сплошную среду.
Идеальной жидкостью называют жидкость, у которой отсутствует
вязкое трение и объёмная вязкость ( = 0, = 0), теплопроводность ( = 0), а
модуль сдвига равен 0 ( = 0). Несмотря на то, что это весьма идеализированная
модель сплошной среды, многие характерные черты движения жидкостей
могут быть изучены при помощи этой простейшей модели, по крайней мере,
вдали от поверхности обтекаемых тел.
7.1. УРАВНЕНИЯ ДВИЖЕНИЯ ДЛЯ СЖИМАЕМОЙ И НЕСЖИМАЕМОЙ
ИДЕАЛЬНОЙ СРЕДЫ
7.1.1. Замкнутая система уравнений сохранения для идеальной
среды
В пренебрежении вязкостью для идеальной ньютоновской среды общий
тензор напряжений согласно (6.11.2) имеет простой вид:
(7.1.1)
ik ik ~ik P ik .
Поэтому уравнение движения идеальной среды в соответствии с уравнением
(6.4.9) можно записать в следующей форме:
i
1 P
k i
fi .
t
xk
xi
(7.1.2)
Вообще говоря, можно было бы ослабить условие идеальности и полагать, что
вязкость жидкости настолько мала, что ~ik / xk P / xi . Однако это условие
заведомо не выполняется вблизи поверхности обтекаемых тел.
Уравнение (7.1.2) называют уравнением Эйлера. Уравнение
непрерывности движения (6.3.5), конечно, сохранит свой вид. Уравнение
сохранения внутренней энергии согласно уравнению (6.7.7) и уравнению (6.7.1)
можно записать в виде
вн
υ вн P div υ ,
t
поскольку ik
i
P k .
xk
xk
(7.1.3)
69
Из второго уравнения системы – уравнения сохранения энтропии
(6.7.10) следует физически очевидный результат:
dS
0,
dt
(7.1.4)
т.е. энтропия единицы массы индивидуальной частицы идеальной жидкости
сохраняется в процессе движения. Этот результат очевиден, т.к. сделанные
выше предположения лишили жидкость механизмов возрастания энтропии.
Таким образом, система уравнений сохранения для идеальной жидкости
имеет вид:
k
0,
t
xk
i
1 P
k i
fi ,
t
xk
xi
(7.1.5)
в н
k в н P k .
xk
xk
t
Таким образом, имеется пять уравнений для нахождения семи
неизвестных искомых функций (если внешние силы заданы): , P,T , вн ,i . Для
замыкания системы уравнений (7.1.5.) до полной необходимо добавить
термическое уравнение состояния:
P f1 , T .
Внутренняя энергия вн также может быть определена из калорического
уравнения состояния:
вн f 2 , T .
7.1.2. Движение несжимаемой среды
Условием несжимаемости среды, как отмечалось ранее, является
уравнение divυ 0 . В этом случае из уравнения непрерывности (6.3.3) следует,
что dρ/dt =0, т.е. массовая плотность не зависит ни от координат физического
пространства хi , ни от времени t. Тогда в уравнении Эйлера (7.1.2) плотность ρ
можно внести под знак производной и уравнение записать в векторном виде
P
υ
υ υ f .
t
ρ
(7.1.6)
Для изоэнтропических движений несжимаемой среды уравнение (7.1.6)
можно преобразовать к виду, содержащему только скорость. Для этого
70
предположим, что внешние силы являются потенциальными, т.е. f nom .
Воспользуемся известной формулой из векторного анализа вида
υ υ 1 υ2 υ rot υ .
(7.1.7)
2
После подстановки (7.1.7) в уравнение движения (7.1.6) получим:
υ2 P
υ
υ rot υ εпот .
t
2 ρ
(7.1.8)
Применив операцию rot к обеим частям уравнения (7.1.8) и учитывая, что
rot0, имеем:
rot υ rot υ rot υ .
t
(7.1.9)
Данное уравнение называют уравнением Эйлера в форме Громека. Это
уравнение замечательно тем, что оно содержит только вектор скорости. Таким
образом, в случае течений несжимаемых сред, если массовые силы являются
потенциальными, скорости могут быть найдены независимо от других
параметров течения.
При заданных краевых и начальных условиях решение уравнения (7.1.9)
существует и оно единственное, т.е. задача становится чисто кинематической.
Для отыскания других переменных характеристик течения необходимо, зная
υ υr, t , вернуться к исходной форме уравнения движения Эйлера (7.1.6).
Например, плотность r, t может быть найдена из уравнения
непрерывности, а P P r, t — из уравнения движения Эйлера (7.1.6).
Если ввести аксиальный вектор соотношением ω (1 / 2) rot υ , то
уравнение Громека можно записать в виде
ω
rot υ ω .
t
(7.1.10)
7.1.3. Изоэнтропическое движение
Уравнение сохранения энтропии (7.1.4) свидетельствует о том, что, если
в начальный момент времени во всех точках объёма, занятого идеальной
средой, энтропия была одинакова, то она останется той же самой во всех точках
и во все последующие моменты времени. Тогда из уравнения (7.1.4) можно
записать:
S S0 const.
Движение жидкости
изоэнтропическим.
с
постоянным
значением
энтропии
называют
71
Используя условие изоэнтропичности движения (7.1.4), уравнению
движения идеальной жидкости (7.1.2) можно придать другой вид. Для этого
воспользуемся определением малого изменения энтальпии единицы массы
dh d вн d ( PV0 ) и основным термодинамическим равенством (4.2.1) для
замены малого изменения внутренней энергии в виде:
dh TdS V0 dP TdS
1
dP ,
где V0 - удельный объём жидкости.
Так как для изоэнтропического движения dS = 0, то имеем:
dh
dP
, h
P
.
(7.1.11)
Эти соотношения означают, что при движении идеальной среды
индивидуальная частица испытывает сжатие при увеличении давления. Тогда
уравнение движения в системе уравнений сохранения (7.1.5) принимает вид:
υ
υ υ h f .
t
(7.1.12)
7.1.4. Граничные и начальные условия
Поскольку идеальная среда не имеет вязкости, то её соседние слои могут
иметь какие угодно скорости. Так, например, среда может двигаться вдоль
обтекаемой твёрдой поверхности с любой скоростью. Поэтому единственным
физическим ограничением для скорости среды, обтекающей некоторую
твердую поверхность, есть условие не протекания или условие не накопления
вещества на поверхности. Это условие ограничивает лишь нормальную к
поверхности обтекаемого тела компоненту скорости среды. Так, на
неподвижной поверхности нормальная компонента скорости жидкости должна
быть равна нулю, а на поверхности, движущейся со скоростью u, нормальные
компоненты скорости поверхности и жидкости должны быть равны, т.е.
n 0 .
n un .
(7.1.12)
В качестве начальных или, как уже было сказано выше, краевых условий
необходимо задать все искомые функции в некоторый момент времени в
рассматриваемой области движения или на её поверхности.
72
7.2. УРАВНЕНИЕ БЕРНУЛЛИ
7.2.1. Потенциальное движение идеальной среды
Движение жидкости, при котором во всем занятом движущейся
жидкостью пространстве rot υ 0 , называют потенциальным.
Рассмотрим в качестве массовой силы силу тяжести. Тогда, если ось z
направлена в противоположную ускорению силы тяжести сторону, можно
записать:
nom gz .
Тогда для стационарного ( υ/t 0 ) и потенциального ( rot υ 0 ) движения
идеальной несжимаемой среды в поле тяжести из уравнения (7.1.8) следует
υ2 P
gz 0 .
2 ρ
(7.2.1)
В любой точке потока последнее равенство может выполняться только
тогда, когда выражение в скобках равно некоторой постоянной во всем поле
течения среды, не зависящей от координат, т.е.
υ2 P
gz const1 .
2 ρ
(7.2.2)
Уравнение (7.2.2) есть первый интеграл уравнения движения Эйлера
(7.1.2), и его называют уравнением Бернулли для несжимаемой идеальной
жидкости. Уравнение Бернулли по физическому смыслу является уравнением
сохранения полной энергии единицы массы. Действительно, в нём слагаемые
υ 2 / 2, gz, P/ρ есть кинетическая энергия, потенциальная энергия и работа сил
давления по изменению объема единицы массы, соответственно.
Для сжимаемой среды при изоэнтропическом движении массовая
плотность не зависит от радиуса-вектора r и вн const. Поэтому в
соответствии с (7.1.11) можно записать
P
h .
ρ
Используя эту замену в (7.2.2), получаем уравнение Бернулли для несжимаемой
жидкости при изоэнтропическом движении в форме
υ2
h gz const2 .
2
(7.2.3)
73
7.2.2. Линии тока и траектории. Трубка тока
Линия тока это линия, касательная к которой в точке касания даёт
направление скорости индивидуальной частицы. Траектория это линия или
кривая, описываемая индивидуальной частицей при своём движении. При
установившемся движении линии тока и траектории совпадают. При
неустановившемся движении это, вообще говоря, разные линии.
Для визуализации течения в экспериментах вводят в движущуюся
жидкость мелкие, легкие частицы, которые при соответствующем освещении
довольно ярко светятся. Если сфотографировать поле течения с небольшой
выдержкой, то на фотографии можно наблюдать множество коротких черточек,
«прочерчиваемых» за короткое время экспозиции на фотопластинке
множеством светящихся частиц порошка. Можно подобрать к некоторому
последовательному ряду чёрточек кривые, к которым эти чёрточки являются
касательными, эти кривые и будут линиями тока в жидкости в данный момент
времени. В другой момент времени неустановившегося движения линии тока
могут быть другими. Если же значительно увеличить время экспозиции, то
каждая частица «прочертит» на фотопластинке непрерывную линию через всё
поле течения, охватываемое объективом. Эти линии и являются траекториями
частиц жидкости.
Касательные к линии тока в различных её точках дают направление
скорости различных индивидуальных частиц в данный момент времени.
Касательные к траектории в различных её точках дают направление скорости
одной и той же индивидуальной частицы в различные моменты времени.
Если в жидкости взять некоторый замкнутый контур и через все его
точки провести линии тока, то они составят некоторую трубку, которую
называют трубкой тока. Трубка тока замечательна тем, что по определению
через её боковую поверхность нет потока жидкости. Жидкость в трубку тока
может поступать только через её торцы. Элемент длины линии тока dr и
скорость частицы являются векторами коллинеарными, для которых
отношение соответствующих компонент есть величина постоянная. Поэтому
уравнение линии тока имеет вид
dx
x
dy
y
dz
z
.
(7.2.4)
Рассмотрим стационарное ( υ / t 0 ), не потенциальное ( rot υ 0 ),
изоэнтропическое ( dS / dt 0 ) движение сжимаемой жидкости в поле
потенциальных сил ( f nom ). Спроектируем уравнение (7.1.9) на линию
тока. Для этого умножим скалярно правую и левую часть уравнения (7.1.9) на
единичный вектор l, касательный к линии тока:
74
2
[ υ rot υ] l = h пот l .
2
Но векторное произведение в левой части данного уравнения представляет
собой вектор, перпендикулярный вектору υ , а, следовательно, и l. Поэтому их
скалярное произведение равно нулю. Тогда имеем:
2
2
l h nom h nom 0 .
2
l 2
(7.2.5)
Здесь / l означает производную вдоль направления единичного вектора l.
Следовательно, для данной линии тока справедливо уравнение Бернулли вида
2
2
h nom const3 .
(7.2.6)
Это уравнение является уравнением Бернулли для линии тока при
стационарном, потенциальном движении идеальной сжимаемой жидкости в
поле потенциальных сил тяжести. Уравнение (7.2.6) отличается от уравнения
(7.2.2) только тем, что в случае не потенциального ( rot υ 0 ) движения
жидкости в потенциальном поле силы тяжести константа в правой части
уравнения (7.2.2) постоянна во всём поле течения жидкости. Тогда как в
уравнении (7.2.6) константа в правой части является постоянной лишь для
данной линии тока при не потенциальном движении, когда rot υ 0 , в поле
потенциальных сил тяжести и может иметь другое значение для другой линии
тока. Для несжимаемой же жидкости при не потенциальном движении для
линии тока уравнение Бернулли имеет вид:
2
2
P
nom const4 .
(7.2.7)
Следует заметить, что возможно получить уравнение Бернулли в виде
(7.2.7) каждый раз, когда удаётся выразить слагаемое (1/) p в виде градиента
некоторой функции. Так, для изоэнтропического движения сжимаемой
идеальной жидкости h (1 / )P , а для несжимаемой идеальной жидкости
(1/ )P ( P / ). Очевидно, что это можно сделать и при изотермическом
движении, когда f (P). Тогда выражение (1/ )P (P) / f ( P) можно
выразить в виде градиента некоторой функции Ф(Р) в виде
1
P
1
P
P Ф( P ), Φ( P )
.
f ( P)
f ( P)
Такие движения называются баротропными, а функцию Ф(P) называют
баротропным потенциалом. Для баротропных движений уравнение Бернулли
имеет вид
75
2
2
Φ( P ) пот const5 .
(7.2.8)
7.2.3. Скорость истечения идеальной несжимаемой жидкости из
сосуда
Уравнение Бернулли имеет самое широкое применение на практике.
Рассмотрим несколько примеров. В качестве первого примера рассмотрим
стационарное истечение идеальной несжимаемой жидкости из сосуда (рис.7.1).
Если полагать, что сосуд достаточно велик, а отверстие мало, то можно считать,
что при истечении уровень жидкости не изменяется заметно в течение
достаточно продолжительного промежутка времени. Пусть на поверхность
жидкости в сосуде действует давление P0 (например, атмосферное). Будем
также полагать, что струя вытекает в пространство, где внешнее давление также
равно P0 (истечение в атмосферу). Обобщение на различные давления не
составляет труда. Проведем некоторую гипотетическую линию тока и выберем
на ней две точки: одну на поверхности жидкости в сосуде (точка 1), другую
внутри отверстия (точка 2).
z
Р0
z1
1
Тогда для этой линии тока можно записать
уравнение Бернулли (7.2.7):
12 P0
2 P
2 P
gz const,
gz1 2 0 gz2 .
2
2
2
Поскольку поверхность жидкости в сосуде
( 1 0 ),
предполагается
неподвижной
из
последнего равенства следует:
1=0
h
2 2 gh ,
2
z2
Рис.7.1
2 Р0
x
h z1 z2 .
(7.2.9)
Заметим, что такую же скорость приобретает
тело, которое падает в пустоте с высоты h.
7.2.4. Распределение давления в трубе переменного сечения
Рассмотрим стационарное движение идеальной несжимаемой жидкости
в трубе переменного сечения, направленное слева направо на Рис.7.2.
Действием силы тяжести можно пренебречь. Выберем какую - либо линию тока
(например, осевую). На этой линии тока рассмотрим две произвольные точки 1
и 2. Тогда для этих точек на выбранной линии тока можно записать в
υ1
1
2
υ
P1
S1
76
соответствии с уравнением Бернулли:
12 P1 22 P2
. (7.2.10)
2
2
Из данного уравнения следует, что в
той точке на линии тока, где скорость
больше, гидростатическое давление
меньше и наоборот. Непрерывность
движения жидкости в трубе требует
выполнения следующего закона:
S const, 1S1 2 S2 . (7.2.11)
Данный закон называют также
условием не накопления вещества или
υ2
2P
υ2
S2
Рис.7.2
условием не разрывности струи в любом сечении трубы. В соответствии с этим
законом поток массы при движении идеальной жидкости в трубе переменного
сечения есть величина постоянная. Из этого условия следует, что скорость
несжимаемой жидкости тем больше, чем меньше сечение трубы, и она
максимальна в самом узком сечении трубы. Следовательно, в самом узком
месте трубы давление минимально согласно (7.2.9). Если на поверхности трубы
установить манометрические трубки, то жидкость в них будет находиться на
разных уровнях. Самый низкий уровень манометрической жидкости,
следовательно, будет в самом узком сечении трубы.
В качестве примеров, которые могут быть просто объяснены при
помощи установленного вывода, можно привести следующие. Например,
капитанам судов запрещается проводить сближение судов, идущих
параллельным
курсом,
до
некоторого
минимального
расстояния.
Действительно, при этом вода между двумя судами приобретает некоторую
дополнительную скорость за счёт сужения канала, образованного бортами
судов, а давление воды между судами оказывается меньшим, чем вне них.
P0 , 0 = 0
P1 , 1
а)
P0 , 0 =0
0
P1 , 1
0
P0
P1 , 1
б)
в)
Рис.7.3
P1 , 1
P0 , 0
г)
77
Поэтому возникают силы, равные разности сил давлений на внешние и
внутренние борта судов и стремящиеся сблизить суда, что может привести к их
столкновению (рис.7.3а). Хорошо известен экспериментальный факт, что, если
продувать воздух между двумя параллельными листами бумаги, то они будут
стремиться сблизиться (рис.7.3б).Действие пульверизатора также легко понять
на основании полученного выше вывода. Если в отсутствие обдува жидкость в
трубочке и флаконе была на одном уровне, то при продувании воздуха около
верхнего торца трубочки давление атмосферного воздуха уменьшается, а
внутри флакона атмосферное давление сохраняется, если имеется
дополнительный канал в пробке. За счёт разности давлений жидкость
выталкивается вверх по трубочке и разбрызгивается потоком воздуха (рис.7.3в).
При сильных и порывистых ветрах иногда наблюдается непривычное на
первый взгляд явление. Крыша дома вместе с верхним венцом бревен
поднимается вверх, а затем уже опрокидывается ветром. Нетрудно понять,
почему это происходит. Если перед порывом ветра давление снаружи крыши и
на чердаке дома уравниваются, то при резком порыве ветра над крышей
создаётся меньшее давление, чем на чердаке, и если через щели между крышей
и последним венцом коробки дома эта разность давления не успеет
выровняться. Крышу поднимет создавшаяся значительная результирующая
сила, направленная вверх и равная произведению разности давления на
площадь, а затем ветром крыша сбрасывается с дома (рис.7.3г).
7.2.5. Кавитация
Если увеличивать скорость движения жидкости по трубе (рис.7.2) или
при том же самом расходе жидкости уменьшить самое узкое сечение трубы, то
можно в этом сечении получить отрицательное давление. Действительно, из
уравнения Бернулли и закона не накопления вещества в сечениях S1 и Smin
трубы можно записать
12
2
P1
2
max
2
Pmin
, 1 S1 max S min .
(7.2.12)
Из этих уравнений легко получить выражение для минимального давления Pmin
в самом узком сечении трубы S min :
Pmin P1
2
max
2
2
S min
1 2 .
S1
(7.2.13)
Из данного соотношения видно, что если второе слагаемое в правой
части по абсолютной величине будет больше, чем P1 , то минимальное давление
окажется «отрицательным», т.е. частицы жидкости, проходящее сечение трубы
с «отрицательным» давлением будут подвергаться растяжению (такую
78
жидкость называют «растянутой»). Однако, как отмечалось выше, жидкость не
может находиться в растянутом состоянии длительное время. Она «вскипит»
или, как говорят, сплошность жидкости нарушится в результате выделения
пузырьков растворенного в ней газа. Так как при падении давления до
«отрицательных» значений в жидкости выделяются пузырьки, заполненные
паром жидкости или газом, растворённым в ней, или тем и другим в той или
иной концентрации, то возникает так называемое явление кавитации, т.е.
явление нарушения сплошности движущейся среды.
Явление кавитации играет очень важную роль в инженерной практике.
Дело в том, что пузырьки газа, проходя самое узкое сечение трубы, попадают
далее в область более высокого давления и схлапываются. Если такие пузырьки
попадают на поверхность тела, то при их схлапывании возникают довольно
значительные локальные давления, которые, в свою очередь, приводят к эрозии,
т.е. разрушению, материала поверхности. Аналогичные явления возникают при
быстром движении тел в жидкости, например, при вращении гребных винтов
пароходов или лопаток гидротурбин. При этом так же образуются области
«растянутой» жидкости, в которых выделяются пузырьки. Кавитация приводит
к чрезвычайно быстрому их износу и выходу из строя и по настоящее время
является предметом интенсивного изучения. Практически можно считать, что
кавитация возникает тогда, когда в жидкости давление падает до давления
насыщенных паров при данной температуре, т.е. когда Pmin Pнас .
7.2.6. Трубка Пито
При обтекании тупого тела идеальной жидкостью на его поверхности
всегда можно указать точку, в которой вектор скорости набегающего потока
направлен по нормали и в которой скорость равна нулю (точка А на рис.7.4).
Проведем в эту точку линию тока,
которая, очевидно, начинается вдали
от тела и заканчивается в точке А,
которую называют точкой полного
P
A
P0
торможения потока или критической
0 0
точкой, а линию тока – критической.
Для этой линии тока можно записать
уравнение Бернулли, которое для
несжимаемой жидкости в отсутствии
Рис. 7.4
поля потенциальных сил имеет вид
2
2
Из этого уравнения следует
P
P0
.
(7.2.14)
79
P0 P
2
2
,
2 ( P0 P )
.
(7.2.15)
Как видно из (7.2.15), давление в критической точке определяется суммой
давления в набегающем потоке P и некоторой добавки, обязанной своим
возникновением торможению жидкости в критической точке. Эту добавку,
равную 2 / 2 , называют скоростным напором. Последнюю формулу можно
использовать для измерения скорости движения жидкости или скорости
движения тела в неподвижной несжимаемой жидкости.
Прибор, при помощи которого проводят измерение скорости потока,
используя эту формулу, называют трубкой Пито или трубкой Прандтля.
Схематичное изображение такой трубки представлено на рис 7.5.Торцевое
отверстие трубки Пито представляет собой «точку» полного торможения
потока, в которой давление соответствует давлению P0 полного торможения.
Другой же торец U-образной манометрической трубки воспринимает через
отверстие в боковой поверхности корпуса трубки статистическое давление в
потоке P . Очевидно, разность давлений P0 P уравновешивается давлением
столба манометрической жидкости, равным ж gh . Тогда согласно (7.2.13)
имеем
2
ж
gh .
(7.2.16)
В формуле (7.2.16) g - ускорение силы тяжести, ж - плотность
манометрической жидкости, - плотность жидкости, скорость которой
измеряется. В частности, это может быть и плотность газа, если измеряется
скорость газа.
3d
0.1d
P0
d
P
0.3d
8 10d
h
Рис. 7.5. Принципиальная схема трубки Пито
Таким образом, помещая трубку Пито в поток движущейся жидкости
или газа и измеряя создаваемый перепад давления каким-либо манометром,
можно довольно просто измерить их скорость. В результате длительного
80
экспериментального и теоретического изучения в настоящее время выработан
определенный стандарт, гарантирующий процентную точность в оптимальном
диапазоне измерения скоростей. Рекомендации этого стандарта приведены на
рис.7.5. Как видно из рисунка, давление в отверстии на боковой поверхности
трубки будет равно давлению вдали от трубки в невозмущенном потоке P
лишь на расстоянии 3d от торца трубки. Любое другое расположение этого
отверстия не гарантирует стандартную точность. Причины этого будут яснее
при последующем изучении движений идеальной жидкости. Помещая трубку
Пито на самолете, можно измерить скорость полета самолета относительно
воздуха.
В современных приборах для измерения скорости полета самолета указателях скорости используется принцип работы трубки Пито. Однако, в них
вместо жидкостного манометра используется гофрированный цилиндрический
сильфон, длина которого изменяется в зависимости от разности давлений
P0 P . Смещение подвижной плоскости сильфона через рычажно-зубчатую
систему передач передается вращающейся на оси стрелке прибора, которая
после калибровки показывает так называемую приборную скорость полёта,
соответствующую плотности и давлению P газа (воздуха) на данной высоте
полёта. Но давление P уменьшается с увеличением высоты полёта. Это
уменьшение P учитывается применением анероидной коробочки в виде
запаянного с обеих сторон гофрированного цилиндрического сильфона с
вакумноплотно изолированным воздухом при давлении 760 мм ртутного столба.
С увеличением высоты полёта длина коробочки увеличивается, а смещение её
подвижного торца обеспечивает с помощью механической системы
дополнительный поворот стрелки прибора, увеличивая значение приборной
скорости на некоторую величину-поправку на высоту полёта. Приборную
скорость с поправкой на высоту полёта называют истинной скоростью. В
современных указателях скорости имеется две стрелки, показывающие
приборную и истинную скорости. Первая из них позволяет летчику
контролировать минимально-допустимую скорость полёта при пилотировании
самолёта, а вторая - выдерживать время движения по маршруту полёта.
7.3. ВЛИЯНИЕ СЖИМАЕМОСТИ СРЕДЫ
Как видно из соотношения (7.2.15), давление в критической точке P0
больше, чем давление жидкости вдали от тела, на величину скоростного напора
2 / 2 . Таким образом, индивидуальная частица газа или жидкости при
движении по критической линии тока испытывает сжатие. При этом её
плотность увеличивается. Это явление изменения плотности будет наблюдаться
и для частиц, движущихся по другим линиям тока. Однако наиболее
значительное изменение, очевидно, будет наблюдаться для частиц на
81
критической линии тока. Поэтому, если учесть сжимаемость среды, то давление
в критической точке должно иметь некоторое другое значение, учитывающее,
что плотность среды вдали от тела и в критической точке не равны , как это
предполагалось при выводе формулы (7.2.15).
Оценим влияние сжимаемости среды на давление в критической точке.
Если среда несжимаема, то давление P0 в критической точке определяется
согласно (7.2.15). Для сжимаемой среды необходимо воспользоваться
уравнением Бернулли в форме (7.2.2) в отсутствии поля тяжести и, учитывая
изменение энтальпии единицы массы, запишем его для критической линии тока
в виде
02
2
h0
2
h , 0 0, h0
2
2
2
h .
(7.3.1)
Будем полагать, что сжатие индивидуальных частиц, движущихся по
критической линии тока с достаточно большой скоростью, происходит
адиабатически, т.е. без теплообмена с другими частицами. В этом случае, как
было показано в п.7.1.1, имеем
dh
1
dP .
Так как адиабатическое сжатие индивидуальной частицы на критической линии
тока описывается уравнением Пуассона (или уравнением адиабаты), то
очевидны следующие преобразования при вычислении энтальпии h единицы
массы:
P
Здесь
const, h
c p / cv
dP
const
показатель
1
d const 2 d .
адиабаты.
Интегрируя
с
(7.3.2)
точностью
до
несущественной произвольной постоянной интегрирования, получим:
h const
1
1
P
1
.
(7.3.3)
Подставляя значение h (7.3.3) в уравнение Бернулли (7.3.1), имеем
P0
1 0
P
1
2
2
,
P0
1 2
1
.
P 0
P 2
(7.3.4)
Отношение плотностей 0 возможно найти из уравнения Пуассона,
подстановка которого в (7.3.4) позволяет определить P0 :
82
1 2
P0 P 1
P 2
1
.
(7.3.5)
Полагая, что второе слагаемое мало по сравнению с единицей, представим
(7.3.5) как бином Ньютона:
2
2
2
1 2
1 2
... P 1 1
... .
P0 P 1
2 P
2 2 P
2 P 2 2 P
Следовательно, давление P0 сжимаемой среды в точке полного торможения
равно:
P0 P
2
2
1 2
1
... .
2 2 P
(7.3.6)
Сравнивая полученное выражение с формулой (7.2.13), можно сделать
следующее заключение: если справедливо соотношение
1 2
1 ,
2 2 P
(7.3.7)
то формула (7.3.6) переходит в формулу (7.2.15) для несжимаемой среды. Таким
образом, при выполнении неравенства (7.3.7) необходимо среду (жидкость, газ)
рассматривать несжимаемой.
Как показано в п.6.12, скорость c адиабатического распространения
продольных волн сжатия в ньютоновских ( 0) средах равна c l2 k ад / . Но
согласно (5.2.7) адиабатический модуль k ад V P / V s , поэтому имеем:
P
c2 V 2
.
V s
(7.3.8)
Для идеальной среды в адиабатическом процессе производную ( P / V ) s
можно найти из уравнения адиабаты PV const , после подстановки которой в
(7.3.8) получим:
с 2
P
.
(7.3.9)
Скорость c называют скоростью звука, т.е. скорость звука является скоростью
распространения продольных волн сжатия в среде. Тогда неравенство (7.3.7)
можно записать в следующем виде
1 2
1.
4 c 2
(7.3.10)
Таким образом, если скорость движения среды значительно меньше
скорости звука в ней, то ее можно рассматривать как среду несжимаемую.
83
Например, если воздух ( c 330 м/сек) движется со скоростью = 70 м/сек, то
максимальная поправка к давлению в критической точке составит 11
, %, что
можно не учитывать в большинстве инженерных расчётов и теоретических
рассмотрений.
7.4. ВИХРЕВОЕ ДВИЖЕНИЕ
7.4.1. Сохранение циркуляции скорости. Теорема Томсона
Циркуляцией некоторого вектора А по замкнутому контуру ( l ) называют
интеграл вида:
Г A dl ,
(7.4.1)
(l )
где dl элемент контура интегрирования.
Рассмотрим изменение во времени циркуляции скорости υ
баротропного движения идеальной жидкости в поле потенциальных сил по
некоторому индивидуальному контуру, охватывающему одни и те же
индивидуальные частицы жидкости. В процессе движения контур может
деформироваться, т.е. изменять свою форму и длину. Имеем:
dГ d
d
υ dl υ dr ,
dt dt ( l )
dt ( l )
(7.4.2)
т.к. элемент длины контура dl может быть представлен как разность радиусов
dl r1 r2 dr .
векторов близких точек контура, т.е.
Проведем
дифференцирование под знаком интеграла:
dυ
2
d
dυ
dr
υ
dr
dr
υ
d
dr
d
.
dt
dt ( )
dt
dt
()
()
2
(7.4.3)
Известно, что интеграл по замкнутому контуру от полного дифференциала
некоторой функции равен нулю. Поэтому второе слагаемое в (7.4.3) равно
нулю. В уравнении (7.4.3) полную производную от скорости по времени можно
заменить, используя уравнение Эйлера для баротропного движения в поле
потенциальных сил (7.1.5). Тогда, если воспользоваться формулой Стокса,
получим
dГ
Ф nom dr rotФ nom dS 0 ,
dt
()
(S )
(7.4.4)
так как в соответствии с известным соотношением из векторной алгебры
rot 0.
Таким образом, результат (7.4.4) является основным содержанием
теоремы Томсона, которая формулируется следующим образом:
84
Циркуляция скорости движения идеальной жидкости по замкнутому
контуру, охватывающему одни и те же частицы, в поле потенциальных сил
при баротропных движениях сохраняется, т.е. она не зависит ни от
координат, ни от времени.
Из уравнения (7.4.4) следует
Г υ dl rotυ dS const .
l
S
(7.4.5)
Рассмотрим линию тока. В некоторой ее точке построим малый
индивидуальный ( l ) контур площадью dS , охватывающей эту линию тока.
Очевидно, при своем стационарном движении контур будет всегда охватывать
эту линию тока. Предположим, что в какой-то её точке rotυ 0 . Тогда, согласно
теоремы Томсона ротор скорости будет равен нулю и во всех последующих
точках линии тока, поскольку по определению линии тока такой контур не
может быть сжат в точку при своем движении, т.к. dS 0 , а rotυ dS в (7.4.5)
должен сохраняться, т.е. равняться нулю при любой ориентации dS . Если
движение идеальной жидкости в некоторый момент времени потенциально,
например, начинается из состояния покоя (rot υ 0) , то оно будет
потенциальным и во все последующие
моменты времени движения.
Однако эти рассуждения имеют ограниченную применимость даже и для
идеальной жидкости. Они, очевидно, неприменимы для линий тока,
проходящих в непосредственной близости к поверхности обтекаемого тела,
хотя бы потому, что для такой линии тока невозможно провести замкнутый
контур, охватывающий ее, который при своем движении не пересекал бы
поверхность тела. Скорость движения идеальной жидкости на поверхности
обтекаемого тела, а также на некоторых поверхностях в жидкости за ним может
претерпевать разрыв, что означает появление на этих поверхностях ротора
скорости, несмотря на то, что набегающий поток может быть потенциальным.
Для реальных же жидкостей, обладающих вязкостью, теорема Томсона
не имеет места в силу непотенциальности вязких сил, действующих в
жидкости. И если вдали от тела действие этих сил может практически не
проявляться, то вблизи поверхности обтекаемого тела они могут играть
существенную роль. Поэтому, если в жидкости образуются вихри, то они
образуются, прежде всего, вблизи поверхностей обтекаемых тел.
7.4.2. Вихревая трубка. Теорема Гельмгольца
Аналогично линии тока можно ввести понятие вихревой линии.
Вихревая линия - это линия, касательная к которой в данной точке определяет
направление ротора скорости в этой точке. Очевидно, уравнение вихревой
линии имеет вид:
85
dx
x
dy
y
dz
z
1
ω rot υ .
2
,
(7.4.6)
Здесь i - i-я компонента ( i = x, y, z ) угловой скорости мгновенного поворота.
Аналогично трубке тока можно построить вихревую трубку. Рассмотрим
некоторый контур, охватывающий малую площадку S. Через каждую точку
этого контура проведем вихревую линию. Тогда совокупность этих линий
ограничит вихревую трубку. Скалярное произведение ω ΔS называют
интенсивностью вихревой трубки.
Теорема Гельмгольца утверждает, что интенсивность вихревой трубки
неизменна по её длине и не зависит от времени.
Рассмотрим некоторую вихревую трубку (рис.7.6). Вычислим поток
вектора ω через поверхность S, ограничивающую некоторый объём V трубки.
Используя теорему Гаусса-Остроградского, можно записать
1
ω dS div ω dV 2 div rot υ dV 0 ,
S
V
(V )
(7.4.7)
т.к. из векторной алгебры известно, что div rot 0. Разделим интеграл по
поверхности на две части: интеграл по боковой поверхности и интеграл по
S1 и S 2 . Очевидно, что по определению вихревой
торцевым площадкам
трубки интеграл по боковой поверхности равен нулю. Интеграл по
элементарным
торцевым
площадкам
можно
записать в виде суммы двух
n
ω1 S1 ω2 S2 0.
слагаемых:
n2
Принимая во внимание направление
единичных нормальных векторов к
этим
площадкам,
получим
S
2
S
1S1 2 S 2 . Можно было бы
n1
S1
вдоль трубки тока построить не две,
а
несколько
площадок
и,
Рис.7.6
следовательно,
можно
затем
записать:
1S1 2 S 2 3 S3 ... n S n const.
(7.4.8)
Из последнего соотношения следует, что интенсивность вихревой трубки
постоянна вдоль трубки, т.е. не зависит от радиуса вектора r . В силу же
теоремы Томсона можно записать
dГ d
d
d
υ dl
rotυ dS 2 ω dS 0 .
dt dt
dt S
dt S
Следовательно, для интенсивности вихревой трубки имеем:
(7.4.9)
86
d
ω ΔS 0,
dt
ω ΔS const .
(7.4.10)
т.е. интенсивность вихревой трубки не зависит от времени.
Таким образом, интенсивность вихревой трубки сохраняется в
пространстве и с течением времени. Если в начальный момент времени
интенсивность вихревой трубки была равна нулю ω 0 , то она будет равна
нулю и во все последующие моменты времени. Если же в начальный момент
времени интенсивность вихревой трубки не равна нулю (ω 0) , то она
сохраняется и во все последующие моменты времени. То есть, вихревое
движение в идеальной жидкости не возникает и не уничтожается, что и
составляет содержание теоремы Гельмгольца.
Следовательно, вихревые трубки не
могут начинаться и заканчиваться
внутри жидкости. Они должны быть
или замкнутыми, или начинаться и
заканчиваться на поверхности твёрдых
тел или на свободной поверхности
жидкости.
Рис.7.7
Так как теорема Томсона справедлива лишь для баротропных движений
в поле потенциальных сил, то источником возникновения вихревых движений
могут, очевидно, быть или не потенциальные силы вязкости, или не
баротропность движения.
7.4.3. Прямолинейная одиночная вихревая нить
Прямолинейной вихревой нитью называют область пространства, в
которой
среда
вращается
относительно
неограниченно
длинной
прямолинейной оси симметрии. Рассмотрим такую нить, ось которой
перпендикулярна плоскости (рис.7.8). Интенсивностью прямолинейной
вихревой нити называют предел следующего вида
Γ lim ω ΔS .
S 0
(7.4.11)
Наличие вихря приводит к появлению некоторого поля скоростей среды вокруг
центра нити. Для неограниченно длинной прямолинейной нити поле скоростей,
очевидно, будет обладать цилиндрической симметрией. Движение жидкости
одинаково во всех плоскостях, перпендикулярных нити. В этих плоскостях
частицы двигаются по окружностям, центром которых является след нити на
плоскости. Такое движение среды называют плоским вихрем. Закон изменения
скорости частиц в плоском вихре в зависимости от расстояния от нити можно
получить, если воспользоваться определением циркуляции скорости (7.4.1) и
теоремой Томсона:
87
Γ υ dl 2r const,
Г
.
2r
(7.4.12)
Из (7.4.12) видно, что движение в таком вихре имеет особенность в точке r = 0,
где .
Рассмотрим один из примеров плоского вихря с постоянной циркуляцией
r
(рис.7.8). Пусть индивидуальная частица
0
вращается в плоском вихре на расстоянии
υ
r от центра вихря со скоростью
υ ( r 0, , z 0) .
Запишем
Рис.7.8
выражение из векторной алгебры для
в
цилиндрической
системы
rot υ
координат:
1 z
1 r 1 r
n r r z n
n z . (7.4.13)
rot υ
r
z
z
r
r
r
r
Если частица в плоском вихре (см. рис.7.8) вращается по часовой стрелке, то
согласно определению rot υ направлен в сторону, откуда вращение частицы
наблюдается против движения часовой стрелки, т.е. rot υ направлен за
плоскость чертежа (от наблюдателя). Поэтому ненулевым является только
единственный орт направления оси z, а именно n z 0 , а n r n 0 . Поэтому в
(7.4.13) первое и второе слагаемое равны 0. Поскольку для плоского вихря
составляющие скорости r z 0 , а определяется в соответствии с
(7.4.12), то очевидно, что и третье слагаемое в (7.4.13) также равно нулю, т.к.
( r )r 0 .
Таким образом, в плоском вихре (рис.7.8) rotυ = 0. Это означает, что
движение среды в таком плоском вихре является безвихревым, т.е.
потенциальным, и индивидуальные частицы вращаются по окружности с
различными радиусами r без вращения вокруг осей, проходящих через них.
Схематично такое движение частиц изображено на рис.7.9. В природе такое
движение можно наблюдать при истечении жидкости из сосуда с отверстием в
его дне, т.е. при наличии воронки на поверхности жидкости.
88
Рис.7.9
Рис.7.10
Рассмотрим теперь случай, когда жидкость вращается как абсолютно
твёрдое тело. Причем, индивидуальная частица, находящаяся на расстоянии r
от оси вихря (рис. 7.8), вращается с линейной скоростью υ ω r , где ω есть
угловая скорость вращения. Запишем i - компоненту ротора скорости движения
индивидуальной частицы, используя тензорную запись в виде:
rot i ω r ikl
lmn m xn m ikl lmn km m ikl lmk .
xk
Если в первом символе Леви-Чивита дважды переставить индекс l , то его знак
не изменится, т.е. ikl lik . Далее, запишем скалярное произведение двух
символов
Леви-Чивита
через
разность
скалярных
произведений
соответствующих символов Кронекера согласно шестого свойства символа
Леви-Чивита (см. п. 6.5) и проведем простейшие преобразования. В результате
имеем:
rot i ω r i m im kk ik mk m 2 im 2 i .
(7.4.14)
Следовательно, i-я компонента ротора линейной скорости движения
индивидуальной частицы rot i υ в плоском вихре в среде, вращающейся как
абсолютно твёрдое тело, определяется i-ой компонентой угловой скорости
мгновенного поворота самой частицы. Поэтому при одном повороте такой
индивидуальной частицы в плоском вихре вокруг некоторой оси она совершает
один оборот вокруг оси, проходящей через неё (рис. 7.10). Таким образом,
движение среды в плоском вихре как абсолютно твёрдого тела является
движением вихревым, не потенциальным (rotυ 0) .
Рассмотрим ещё один случай, когда частицы двигаются прямолинейно
вдоль некоторой плоской поверхности в направлении оси х с градиентом
скорости по нормали к поверхности (ось у). Пусть профиль скорости
определяется линейным законом x ay (рис. 7.11). Запишем ротор скорости в
виде матрицы:
89
у
i
rot υ
x
x
j
y
y
k
i
z x
z
x
j
y
0
k
.
z
0
t0 t1 t2
Отличной от нуля является только zкомпонента ротора rot z υ , которая равна
х
y x
a 0 .
rot z υ
Рис 7.11
y
x
Таким образом, стационарное движение идеальной среды вдоль
поверхности с некоторым профилем скорости является вихревым, поскольку с
течением времени индивидуальная частица за счёт разности скоростей верхней
и нижней её границ изменяет свою форму, вращаясь относительно проходящей
через неё оси.
Не следует отождествлять вихревое движение rot υ 0 только с
движением частиц по окружности: не всякое движение по окружности
является вихревым и не всякое вихревое движение есть движение по
окружности. Движение называют безвихревым (потенциальным с rot υ 0 )
только тогда, когда индивидуальные частицы двигаются без вращения
относительно некоторых осей, проходящих через сами частицы. В противном
случае движение называют вихревым, не потенциальным с rot υ 0 .
7.4.4. Примеры вихревых движений
Вихревое движение интересно наблюдать на вихревых кольцах. Чаще
всего они демонстрируются с помощью ящика, в передней стенке которого
имеется отверстие, а задняя стенка достаточно гибкая. Наполняя ящик дымом и
ударяя рукой по задней стенке, можно наблюдать, как из отверстия вслед за
ударом вылетают вихревые кольца, которые благодаря частичкам дыма хорошо
видны. Такие кольца обладают любопытными свойствами. Они могут
отталкиваться друг от друга, притягиваться, отражаться от твердой стенки,
попеременно обгонять друг друга и т.д. Эти свойства объясняются движением,
которое такие кольца стимулируют в окружающем воздухе. Линии тока такого
движения в некоторый момент времени примерно можно изобразить в виде
концентрических окружностей (рис. 7.12), хотя эксперименты показывают, что
линии тока представляют собой спиралевидные линии. Ясно, что, если
встречаются два кольца,
90
у
которых
внутренние
потоки
направлены навстречу друг другу
(например, из разных ящиков), то
такие кольца должны отталкиваться.
Если же при одинаковом направлении
движения быстрее движущееся кольцо
догоняет впереди идущее, то оно будет
втянуто в первое, пройдет внутри него
и даже ускорится его внутренним
потоком. В свою очередь предыдущее
Рис 7.12
кольцо по- лучит от последующего
некоторую «закрутку»( индуцирует дополнительную втягивающую силу), которая заставит его
двигаться быстрее. Впоследствии оно может догнать обогнавшее кольцо, и
кольца поменяются ролями. Это явление называют «чехардой» колец. После
прохождения достаточного промежутка времени вихри затухают вследствие
вязкости любой реальной среды. Энергия вихревого движения, в конечном
счёте, переходит в тепло.
Зеркальное отражение колец от твердой стенки также можно понять,
рассматривая взаимодействие внутреннего движения воздуха в кольце с
твердой поверхностью. В начале прошлого столетия английский учёный
Томсон пытался построить модель электрона в виде вихревого кольца
некоторой субстанции. Действительно, такая модель обладает некоторыми
свойствами заряженных частиц (притяжение разноименных зарядов и
отталкивание одноименных).
В природе вихревые движения чаще всего наблюдаются в виде смерчей.
Смерч возникает вдали от поверхности земли в результате интенсивных
встречных вертикальных движений воздуха. Нисходящие потоки воздуха
образуются под грозовыми тучами вследствие охлаждения его дождём или
градом. Если такая туча надвигается на сильно прогретую местность с
интенсивными восходящими потоками нагретого воздуха, то возникает
взаимодействие этих резко разграниченных потоков. В результате на фронте
тучи возникает вихревая трубка (рис. 7.13), концы которой в полном
соответствии с теоремой Гельмгольца должны затем опуститься на землю. На
земле эти вихри наносят большие разрушения в силу локализации воздействия:
разрушаются постройки, валится лес, полегают посевы и т.д.
91
Рис. 7.13
Нетрудно видеть (рис. 7.13), что если смотреть сверху, то в левой ветви
смерча на земле воздух будет вращаться, например, по часовой стрелке, тогда
как в правой ветви против часовой стрелки. Расстояние между концами
вихревой трубки на земле иногда достигает десятков и сотен километров.
Поэтому наблюдателю виден чаще всего лишь один его конец, который кажется
«сошедшим» с неба. Однако, как следует из теоремы Гельмгольца, на земле на
некотором расстоянии обязательно существует и второй его конец. Так, если в
каком-то месте обнаруживается поваленный по часовой стрелке лес, то
обязательно (в лесистых районах) существует место, где лес повален против
часовой стрелки.
Ясно, что при вихревом движении внутри вихря в результате действия
центробежных сил образуется область пониженного давления, в которую по
поверхности воды или земли может интенсивно всасываться воздух и
перемещаться дальше по оси вихря. Поэтому мелкие, легкие предметы,
захваченные этим потоком (листья, белье, щепки и т.д.) могут быть перенесены
по оси вихря, как по трубе, на значительные расстояния, и для местного
наблюдателя кажутся «упавшими с неба». История знает немало таких чудес,
когда «с неба» падали лягушки, рыбы и даже монеты.
Естественно, что вихревое движение в смерчах с течением времени
должно затухать и исчезать вследствие диссипации энергии, т.к. реальная
жидкость всегда обладает определенной вязкостью. Таким образом, вихревое
движение в природе возникает из-за не потенциальных вязких сил и исчезает
из-за диссипации механической энергии движения вихря вследствие вязкости
реальных сред. Однако модель идеальной жидкости позволила нам изучить
основные законы вихревого движения и понять роль вязкости в вихревом
движении реальных сред.
91
7.5. ПОТЕНЦИАЛЬНОЕ ДВИЖЕНИЕ
7.5.1. Потенциал скорости. Граничные условия
Движение идеальной среды называют потенциальным, если в любой
точке пространства, занятого движущейся средой, rot υ 0 . Поэтому скорость
может быть представлена в виде градиента некоторой скалярной функции ,
называемой потенциалом скорости, т.е.
υ ,
x
,
x
y
,
y
z
.
z
(7.5.1)
Действительно, если скорость может быть представлена в виде градиента
скалярной функции, то движение потенциально, т.к.
rot υ rot 0.
Для потенциального движения rot υ 0 циркуляция по любому
замкнутому индивидуальному или неиндивидуальному контуру в односвязной
области течения равна нулю, т.е.
υ dl rot υ dS 0.
()
(S)
Это означает, что при потенциальном движении не может быть замкнутых
линий тока, т.к. в противном случае (линия тока совпадает с замкнутым
контуром интегрирования) циркуляция скорости была бы отлична от нуля.
Баротропное нестационарное движение в поле сил тяжести описывается
уравнением Эйлера (7.1.9, 7.2.8)
2
υ
υ rotυ Ф( P) gz .
t
2
(7.5.2)
Но для потенциального движения идеальной среды согласно (7.5.1) имеем
υ
.
t t
t
Поэтому из (7.5.2) следует уравнение вида
2
Ф( P) gz const f (t ) .
t
2
(7.5.3)
Постоянная в правой части уравнения (7.5.3) при нестационарном движении
может зависеть от времени, однако в данный момент времени она одинакова
для всех точек пространства, занятого средой. Поскольку конечной целью
является нахождение скорости движения среды, а скорости определяются
производными от потенциала по координатам согласно (7.5.1), то любая
92
функция времени, добавленная к потенциалу, не изменит результата при
вычислении скоростей. Заменяя на f (t )dt в левой части (7.5.3),
получаем в правой части уравнения (7.5.3) нуль. Поэтому без ограничения
общности рассмотрения можно в уравнении (7.5.3) функцию f (t ) положить
равной нулю.
Для стационарного движения / t 0 и из уравнения (7.5.3) следует
обычное уравнение Бернулли с постоянной в правой части, не зависящей ни от
координат, ни от времени.
Ранее было показано, что для идеальной среды, которая является
несжимаемой, должно выполняться условие div = 0. Но согласно (7.5.1) это
условие дает уравнение
div 0 .
(7.5.4)
Таким образом, при стационарном потенциальном движении
несжимаемой среды необходимо найти лишь одну скалярную функцию ,
которая удовлетворяет уравнению Лапласа (7.5.4). Поскольку при
нестационарном движении потенциал скорости должен быть функцией не
только координат, но и времени, согласно (7.5.3), а уравнение Лапласа содержит
лишь производные по координатам, то отсюда следует, что время в может
быть введено только через граничные условия.
Граничные условия для идеальной среды в каждой точке поверхности
обтекаемого тела имеют вид
n un .
Здесь n нормальная к поверхности обтекаемого тела компонента скорости
среды, u n нормальная компонента скорости движения элемента поверхности
тела (если поверхность неподвижна, то un 0 ). Для потенциального движения
граничные условия можно записать в виде:
n n υ n
,
n
un .
n
(7.5.5)
Величина u n должна быть задана как функция координат и времени, т.е.
u n un (r, t ).
Таким образом, потенциал в любой точке несжимаемой среды
зависит от времени так же, как и потенциал на поверхности обтекаемого тела.
Так, если при движении тела в идеальной несжимаемой среде создаваемое им
движение является потенциальным, то в каждый момент времени потенциал во
всех точках среды зависит лишь от скорости un движения тела в тот же момент
времени.
93
Физически это можно понять, если принять во внимание, что
возмущение, а следовательно, и взаимодействие между различными частями
несжимаемой среды распространяется с бесконечной скоростью. Поэтому
изменение скорости в какой-либо точке на поверхности ведёт к мгновенному
изменению скоростей во всех точках поля течения идеальной несжимаемой
среды.
7.5.2. Функция тока для плоского движения идеальной среды
Движение среды называют плоским, если все характеристики движения
зависят только от двух координат x и y, или плоское движение это такое
движение, при котором во всех плоскостях, параллельных координатной
плоскости ( x, y ) , его характеристики одинаковы.
Для описания плоского потенциального движения несжимаемой среды
удобно ввести ещё одну функцию - функцию тока. Эту скалярную функцию
определяют следующим образом:
x
,
y
y
.
x
(7.5.6)
Можно показать, что функция тока условию несжимаемости
удовлетворяет автоматически по ее определению (7.5.6). Действительно, имеем
y
divυ x
0,
0.
x
y
x y y x
Для плоского потенциального движения имеем:
rot υ 0 , rot z υ
y
x
x
, 0. (7.5.7)
,
y
x x y y
Таким образом, при плоском потенциальном движении несжимаемой
среды, как потенциал скорости , так и функция тока
должны
удовлетворять уравнению Лапласа, т.е. они являются гармоническими
функциями. При непотенциальном движении функция тока должна
удовлетворять уравнению, которое можно получить, подставляя (7.5.6) в
уравнение Громека (7.1.10). Очевидно, что функция тока может быть введена
только для плоского движения среды.
7.5.3. Свойства функции тока
Функция тока обладает рядом свойств, которые оправдывают её введение:
1. Линии тока это линии, которые удовлетворяют уравнению const .
Действительно, уравнение линии тока имеет вид:
dx
x
dy
y
, y dx x dy 0 ,
dx
dy 0 , d 0 , const.
x
y
94
2. Если на плоскости ( x, y ) между двумя точками, лежащими на двух
различных линиях тока, провести некоторую произвольную кривую, то поток
среды через эту кривую будет определяться разностью значений функций тока
для этих линий тока.
Действительно, расход жидкости Q через линию 1-2, а точнее через
площадку единичной ширины в направлении оси z со стороной dl в плоскости
(x,y) (рис.7.14), равен:
Q υ n dl n x x n y y dl,
2
(l )
1
nx sin (n, x) sin , ny cos(n, x) cos .
Далее, из рис 7.14 очевидны соотношения: sin dy / dl и cos dx / dl.
Подставляя полученные соотношения в формулу для расхода Q и используя
определение функции тока (7.5.6), получим:
2
2
2
Q x dy y dx
dy
dx d 2 1 .
x
1
1 y
1
(7.5.8)
3. Линии тока ( const) и линии равного потенциала ( const)
взаимно ортогональны в каждой точке поля течения.
Направления нормальных единичных векторов к этим линиям
определяются соотношениями:
.
n
, n
Скалярное произведение этих единичных векторов равно:
1
n n
x x y y
y
2
2 const
dx
dy
υ
dl
1
n
1 const
х
Рис.7.14
.
Но согласно определения потенциала
скорости (7.5.1) и функции тока
(7.5.6) легко видеть, что и последнее
соотношение
равно
нулю.
Действительно:
n n x y y x 0. (7.5.9)
Таким образом, линии семейства
const и линии семейства const
в
точках
пересечения
взаимно
ортогональны, т.е. пересекаются под
прямым углом под прямым углом.
95
7.6. НЕКОТОРЫЕ МЕТОДЫ РЕШЕНИЯ ГАЗОДИНАМИЧЕСКИХ ЗАДАЧ ДЛЯ
ИДЕАЛЬНОЙ ЖИДКОСТИ
Для решения задач о движении идеальной жидкости разработаны
специальные методы математического анализа. Рассмотрим применение
некоторых из этих методов при решении конкретных задач.
7.6.1. Метод конформных отображений
В соответствии с определениями потенциала скорости (7.5.1) и
функции тока (7.5.6) для плоского, потенциального движения идеальной
несжимаемой жидкости компоненты x и y скорости υ индивидуальной
частицы равны:
x
, y
.
x y
y
x
(7.6.1)
Но соотношения (7.6.1) для функций и представляют собой известные
условия Коши - Римана для комплексной функции вида
= + i,
= (z),
где комплексная функция является аналитической функцией комплексного
аргумента z = x + iy, т.е. функция (z) в каждой точке комплексной плоскости
имеет определенную производную
d
i
i
x i y .
dz x
x
y
y
(7.6.2)
Функцию (z) называют комплексным потенциалом, а производную d dz комплексной скоростью.
Таким образом, используя теорию функций комплексного переменного,
имеется возможность иметь дело не с двумя функциями и от двух
аргументов x и y, а лишь с одной комплексной функцией от одного
комплексного переменного z.
Кроме того, начиная с решения какой-либо тривиальной задачи, методами
конформных отображений можно получить решение целого ряда более
сложных задач, прямое решение которых часто бывает затруднительно.
7.6.2. Обтекание плоской пластинки идеальной несжимаемой
жидкостью
Рассмотрим потенциальное ( rotυ 0 )обтекание неограниченно широкой
плоской пластины однородным потоком идеальной несжимаемой жидкости.
Очевидно, что картина обтекания будет идентична во всех плоскостях,
перпендикулярных пластинке. Поэтому достаточно рассмотреть движение
жидкости в одной из плоскостей.
96
Пусть пластинка длиной 4r0
y1
= const
(рис.7.15) расположена вдоль оси x1
комплексной плоскости z1 x1 iy1 .
Пусть далее скорость набегающего
= const
потока на пластинку вдали от нее
постоянна, равна и направлена
вдоль оси x1 . Картина обтекания в
данном
случае
очевидна.
Действительно,
т.к.
идеальная
2r0
2r0 x1
0
жидкость может беспрепятственно
Рис.7.15
скользить
вдоль
пластинки,
то
пластинка вообще не оказывает
никакого
воздействия на поток, т.е. потенциальный плоскопараллельный набегающий
поток останется таковым вблизи пластинки и после неё. Тогда линии тока
( const ) такого обтекания будут линиями, параллельными оси x , а линии
равного потенциала ( const ) перпендикулярными к ней. Принимая во
внимание вышесказанное, имеем:
x1
,
x1 y1
y1
0.
y1
x1
(7.6.3)
Из первого равенства (7.6.3) имеем:
x1 const1 ,
y1 const2 .
(7.6.4)
Из второго равенства (7.6.3) следует очевидный факт, что потенциал скорости
const3 , которая не зависит от y1 , а функция тока const4 , которая не
зависит от x1 . Поэтому эти функции не зависят ни от x1 , ни от y 1 и
несущественны, т.к. определяются лишь началом отсчёта и можно их положить
равными нулю.
Составим комплексный потенциал :
i x1 iy1 z1 ,
z1 x1 iy1.
(7.6.5)
Здесь z1 комплексная переменная в плоскости x1oy1 .
Далее используем конформное отображение точек комплексной
плоскости x1oy1 в точки комплексной плоскости xoy с переменной z x iy в
виде
r02
z1 z .
z
Из (7.6.6) следует
(7.6.6)
97
z 2 z1 z r02 0, z
z1
2
z12
4
r02 , x iy
x1 iy1
2
x12 y12 2i x1 y1
4
r02
Рассмотрим, как точки области y1 0, 2r0 x1 2r0 плоскости z1
преобразуется в точки плоскости z . Пластинка в плоскости x1oy1 описывается
уравнениями y1 0, 2r0 x1 2r0 . Тогда предыдущее равенство принимает
вид:
x iy
x1
2
x12
4
r
2
0
x1
2
i r
2
0
x12
4
,
x
x1
2
,
y r
2
0
x12
4
.
Таким образом, уравнение пластинки в плоскости xoy имеет вид:
x 2 y 2 r02 .
(7.6.7)
Это уравнение есть уравнение окружности радиуса r0 . Причем, точки
плоскости z1 , имеющие y1 0 или y1 0 , как нетрудно показать, попадают вне
круга.
Таким образом, если в комплексной плоскости z1 имеет место обтекание
пластинки шириной 4r0 однородным плоскопараллельным потоком среды, то в
плоскости z при помощи конформного отображения (7.6.6) оно преобразуется в
поперечное обтекание этим же потоком бесконечного цилиндра радиусом r0
Причем, общие свойства конформных отображений гарантируют, что в точках,
удалённых на бесконечность, сохраняется направление линий = const и =
const и их ортогональность в любой точке пересечения.
7.6.3. Обтекание цилиндра идеальной несжимаемой жидкостью
Рассмотрим картину обтекания цилиндра в плоскости xoy (рис.7.16). Найдём комплексный потенциал в точке с радиус-вектором r в полярной системе
координат ( r , ):
r02
r02
.
z1 z r cos ir sin
z
r
cos
ir
sin
Умножая числитель и знаменатель дроби выражения в скобках на комплексно
сопряженное число, получаем:
r02
r cos ir sin 2 r cos ir sin i .
r
Из этого определения следуют следующие формулы для и :
r02
1 2 r cos ,
r
r02
1 2 r sin .
r
(7.6.8)
98
Из любого определения (7.6.8) для или можно теперь вычислить
компоненты r и s скорости υ в точке r :
r02
1
s
1 2 sin .
s
r
r
r02
r
1 2 cos ,
r
r
r
y
s
r
Пользуясь полученными выражениями (7.6.8),
нетрудно построить линии тока ( const ) и
линии равного потенциала потенциальные
линии ( const ). Если ввести безразмерный
r r / r0
модуль
радиус-вектора
и
/ 0 ,
безразмерный
расход
где
0 r0 1 есть расход жидкости вдали от
обтекаемого цилиндра через площадку
высотой r0 и единичной длины, то второе
уравнение (7.6.8) приводится к виду
υ
S
r0
0
(7.6.9)
x
Рис.7.16
r
2
r 1 0 .
sin
Задавая величины m ( 0 / n) , где m и n имеют целочисленные значения, и
углы , возможно по известной квадратурной формуле вычислить значения r
и r , а затем построить линии тока. Аналогично строятся и линии равного
потенциала. На рис 7.17 изображена примерная картина расположения линий
тока и линий равного потенциала при обтекании цилиндра. В силу симметрии
изображена лишь верхняя половина течения.
2 1
υ
y
0
2
r
r
1
r0
S
υ
0
0
x
Рис. 7.17
Из (7.6.9) видно, что полученное решение удовлетворяет граничным
условиям для идеальной жидкости: при r r0 , r 0. Компоненты скорости r
и s в любой точке поля течения вычисляются по формулам (7.6.9), а значение
99
модуля скорости индивидуальной частицы может быть определено по
формуле:
r04
r02
1 4 2 2 cos 2 .
r
r
2
2
r
2
s
2
(7.6.10)
На поверхности цилиндра ( r r0 ) модуль скорости равен 2 sin .
Очевидно, скорость имеет максимальное значение на поверхности цилиндра
при углах / 2 и 3 / 2. При этом абсолютное значение максимальной
скорости равно max s max 2 . Из формулы (7.6.10) видно также, что в
критических точках на поверхности цилиндра ( = 0, ) модуль скорости равен
нулю.
Подбирая соответствующее конформное отображение z1 f z , можно из
простейшей задачи обтекания пластинки получить, например, обтекание
эллипса, некоторого профиля крыла и других плоских тел, имеющих более
сложную форму. В такой математической формализации и заключается
эффективность применения теории функций комплексного переменного к
решению задач о плоском, потенциальном движении идеальной жидкости.
7.6.4. Распределение давления на поверхности цилиндра.
Парадокс Даламбера
Вычислим силу, действующую на единицу длины цилиндра со стороны
движущейся среды Для этого вычислим распределение давления по его поверхности. Воспользуемся уравнением Бернулли для какой-либо линии тока
2
2
P
const
2
2
P
.
(7.6.11)
Для линии тока, идущей по поверхности цилиндра (r = r0), с учетом
(7.6. 9) квадрат скорости в любой точке на поверхности цилиндра равен
2 (r r0 ) r2 2 2 (1 4 sin 2 ) .
(7.6.11а)
Из (7.6.11) следует распределение давления в любой точке поля течения
около цилиндра P(r) и на его поверхности цилиндра P(r = r0):
P( r ) P
2
2 ( r )
1
,
2
2
P( r r0 ) P
2
2
1 4 sin 2 . (7.6.12)
Из формулы (7.6.12) видно, что давление максимально при углах = 0 и (см.
рис.7.18), т.е. в критических точках А (180) и В(0) , и равно
PA PB P 2 2 ( как это и следовало ожидать для точек полного
торможения потока).
Давление P в точках С и D на поверхности цилиндра равно давлению в
набегающем потоке P при условии:
100
1
sin 2 ,
4
1 4 sin 2 0,
1
6
,
2
5
,
6
т.е. в точках С(150) и D(30) PC PD P (см.рис.7.18). Если для наглядности
вдоль радиусов, проведённых из центра полукруга под различными углами ,
отложить величину 2P P 2 , принимая её положительной и
направленной по нормали к внешней стороне поверхности на интервалах 0 <
< 300 и 150 < < 1800, а на интервале 30 < < 1500 - отрицательной и
направленной по нормали к внутренней стороне поверхности, то получим
эпюру распределения относительной разности давлений, изображенную на
рис.7.18.
Таким образом, на участках АС и ВД единичные площадки на
поверхности испытывают сжатие под действием сил давления, а на участке СД
- растяжение, т.е. силы давления, действующие на поверхность цилиндра,
стремятся
деформировать (растянуть) его вдоль
оси, перпендикулярной набегающему
y
потоку. Если бы для измерения
E
скорости воспользоваться цилиндром
вместо трубки Пито, то отверстие,
C
(-)
D
которое
должно
воспринимать
давление в набегающем потоке вдали
(+)
150
30
(+)
от тела, должно быть сделано в одной
A
О
B
x
из точек C или D .
Рис.7.18
Вычислим силу F , с которой поток идеальной среды действует на
единицу длины цилиндра в направлении оси z, перпендикулярной скорости
набегающего потока, или силу лобового сопротивления. Для этого достаточно
просуммировать силы давления, действующие на элементы поверхности
цилиндра. По определению (3.2.1) имеем:
F σ ( n ) dS,
(S )
Fi i( n ) dS .
(S )
Но для идеальной среды in ik nk P ik nk Pni . Если ось i совпадает с
осью x, то сила лобового сопротивления Fx равна:
Fx Pn x dS Pn x d 1,
2
S
S
2
2
Fx P cos r0d P 1 4 sin 2
2
0
0
cos r0d 0 .
(7.6.13)
Данный результат и составляет содержание парадокса Даламбера. Полученный
вывод справедлив не только для цилиндра, но и для тела произвольной формы.
101
При обтекании тел идеальной несжимаемой средой, если движение среды
потенциально, сила лобового сопротивления равна нулю. Из симметрии
движения очевидно, что и подъёмная сила F y также равна нулю,
2
Fy P n y d 1 P sin r0 d 0.
()
(7.6.14)
0
Этот удивительный результат был предметом длительной дискуссии
Даламбера и Эйлера. Даламбер говорил в 1744 г.: «Странный парадокс,
объяснение которого предоставляю математикам». Слово «парадокс» (погречески неожиданный) в науке означает неожиданное явление, не
соответствующее обычным представлениям. Объясняя этот парадокс, русский
ученый Эйлер предполагал в 1755 г., что реальная жидкость не похожа на
идеальную. Эйлер писал: «Если некоторые люди увлекутся и будут думать, что
можно продвигать тела через жидкость, не встречая сопротивления, т.к. сила, с
которой жидкость действует на переднюю часть тела, будет уничтожаться
действием такой же силы на заднюю часть, что не имеет места при движении
действительных жидкостей, то такой вывод будет неправилен». Уже в то время
Эйлер отмечал влияние трения реальных жидкостей на происхождение
сопротивления тел. Таким образом, парадокс Даламбера не должен иметь места
при движении реальных, хотя бы и маловязких жидкостей.
В каких случаях идеальной жидкости парадокс Даламбера не имеет
места?
1. В общем случае сила сопротивления может возникать при движении
тела в идеальной среде с разрывом скоростей на некоторых поверхностях,
отходящих от поверхности обтекаемого тела. Так, при обтекании цилиндра
модель идеальной среды допускает существование за телом некоторой
застойной зоны неподвижной среды, ограниченной линиями АВ и СD разрыва
скорости (рис. 7.19).
Очевидно, что для существования застойной зоны
идеальной среды давление в ней должно быть
A
B
однородным и равным неизменному давлению
300
вдоль линий разрыва АС на рис.7. 19. Тогда
D
давление в застойной зоне должно быть равно
C
давлению на поверхности тела в точке
возникновения разрыва А или С. Но, как следует
из предыдущего параграфа давление в точке А
Рис. 7. 19
или С меньше давления в любой точке передней
части обтекаемого тела. Поэтому сила, с которой среда действует на переднюю
часть тела, больше, чем сила, действующая на его заднюю часть, т.е. возникает
некоторая сила сопротивления. Этот прием, т.е. рассмотрение некоторых
разрывных течений идеальной жидкости, используется при вычислении
102
подъемной силы и силы сопротивления крыла самолета, а также в других
задачах гидродинамики.
2. Парадокс Даламбера не имеет места при движениях тела в среде с
образованием волны. Например, при движении частично погруженного тела на
поверхности среды, находящейся в поле тяжести, образуются волны, которые
являются источниками так называемого волнового сопротивления.
3. Парадокс Даламбера отсутствует и при движении тела со
сверхзвуковыми скоростями в сжимаемой идеальной среде, когда в ней
образуются ударные волны (см. раздел «Газовая динамика»).
7.7. СУПЕРПОЗИЦИЯ ПОТЕНЦИАЛЬНЫХ ПОТОКОВ
7.7.1. Обтекание бесконечного цилиндра с циркуляцией
При потенциальном движении идеальной, несжимаемой среды потенциал
скорости должен удовлетворять уравнению Лапласа (7.5.7)
0.
Уравнение Лапласа является линейным уравнением относительно потенциала
скорости . Следовательно, сумма любых его решений также является его
решением. Поэтому, суммируя известные простейшие решения уравнения
Лапласа, можно получить решения, имеющие во многих случаях вполне
реальный смысл и практическое значение. Очевидно:
1 0 , 2 0 , (1 2 ) 0 , 1 ,
1 2 , υ υ1 υ2 .
(7.7.1)
Таким образом, скорость сложного движения определяется суммой векторов
скоростей простых движений.
Наложим на потенциальное движение среды со скоростью при
обтекании цилиндра плоский вихрь с интенсивностью (или циркуляцией) Γ ,
вращающийся против часовой стрелки
Γ 2r s , s
Γ
, r 0 .
2r
(7.7.2)
Суммируя согласно (7.7.1) скорости простых движений, получим скорость
сложного движения с компонентами, которые с учетом (7.6.9), (7.7.1) и (7.7.2)
равны:
r02
r 1 2 cos ,
r
r02
Γ
s 1 2 sin
.
2r
r
(7.7.3)
Для построения линий тока найдем положение критических точек на
поверхности цилиндра при r r0 . В критических точках А и В на поверхности
103
цилиндра υ А υ В 0 (см. рис. 7.18). Следовательно, должны обращаться в нуль
как r , так и s компоненты скорости υ . Радиальная компонента скорости
r на поверхности цилиндра в любой точке равна нулю. Касательная же
компонента скорости s равна нулю в точках, определяемых соотношением
(7.7.3) для r r0 , т.е.
sin кр
Γ
.
4 r0
(7.7.4)
Возможны следующие случаи:
1. Если Γ 0 (обтекание цилиндра без циркуляции), то имеет место
прежний результат (см. п. 7.6.4) и кр 0, .
2. Если Γ 4r0 , то критические точки А и В находятся на верхней
половине поверхности цилиндра, т.к. кр лежит в пределах 0 кр .
3. Если Γ 4r0 , то обе точки сливаются в одну при кр / 2. .
4. При Γ 4r0 sin кр не существует при r r 0 , и критических точек
на поверхности цилиндра не существует; они могут быть расположены только в
поле течения среды..
Картина линий тока для этих случаев представлена на рис. 7.20а, б, в, г .
7.7.2. Распределение давления. Подъемная сила
Вычислим результирующие силы, действующие со стороны среды на
единицу длины поверхности цилиндра при обтекании его потоком идеальной
среды с циркуляцией. Для этого найдём распределение давления по
поверхности цилиндра в соответствии с первым уравнением (7.6.12), имея
ввиду, что при r = r0 r ( ) 0 и 2 2 :
s2
P(r r0 ) P
1 .
2 2
2
а). Г = 0
(7.7.5)
б). Γ 4r0
104
в). Γ 4r0
г). Γ 4r0
Рис. 7.20
Подставляя в (7.6.19) скорость s на поверхности цилиндра (7.6.17), получим:
2
2Г
Г2
1 4 sin 2 sin 2 2 2 .
P(r r0 ) P
2
r0
4 r0
2
(7.7.6)
Силу сопротивления Fx и подъёмную силу Fy возможно вычислить
согласно (7.6.13) и (7.6.14):
2
Fx P cos r0 d ,
2
Fy P sin r0 d .
0
(7.7.7)
0
После подстановки (7.7.6) в (7.7.7) и интегрировании по углу в пределах от 0
до 2 следует:
Γ 2
Γ
Fx 0, Fy sin 2 r0 d
r0 0
2
1
1
sin 2 . (7.7.8)
2 0
4
Как и прежде, для силы лобового сопротивления имеет место парадокс
Даламбера, т.е. Fx 0 . Однако циркуляция стимулирует возникновение
подъёмной силы, которая направлена в сторону, противоположную
направлению оси y (рис. 7.20), и равна
Fy Γ .
(7.7.9)
7.7.3. Эффект Магнуса
При Γ 0 , как и в предыдущей задаче, подъёмная сила F y исчезает.
Возникновение подъемной силы при обтекании цилиндра с циркуляцией
называют эффектом Магнуса. Эффект Магнуса является частным случаем
общей теоремы известного русского гидродинамика Н.Е.Жуковского о
подъёмной силе крыла. Согласно теореме Жуковского для вычисления
подъёмной силы крыла при обтекании его реальной средой необходимо
вычислить лишь циркуляцию скорости вокруг крыла. Жуковским, а затем его
учеником академиком С.А.Чаплыгиным были разработаны специальные
методы вычисления такой циркуляции при разрывных течениях среды около
крыла.
105
Происхождение подъёмной силы при обтекании цилиндра с циркуляцией
легко понять, если обратиться к уравнению Бернулли (7.6.11). Как видно на
рис 7.20, в верхней части поля течения скорость обтекания цилиндра плоским
потоком и циркуляционная скорость (например, при θ = π/2) вычитаются, а в
нижней (при θ = 3π/2) - складываются. Поэтому результирующая скорость
суммарного движения в верхней половине цилиндра оказывается меньше, чем
в нижней. Из уравнения же Бернулли следует, что действующее на верхнюю
половину цилиндра давление, больше, чем на нижнюю. В результате (см. 7.7.8)
возникает результирующая подъемная сила, направленная вниз (рис. 7.20).
Жуковским было предложено простое правило определения направления
действия главного вектора F Fx i Fy j сил давления на поверхность
цилиндра:
- поместить вектор скорости υ набегающего потока при обращенном
движении в центр неподвижного цилиндра, повернуть его на 90 0 в сторону,
противоположную скорости циркуляционного движения; это и даст
направление главного вектора F .
Приведём несколько примеров, демонстрирующих эффект Магнуса. Если
легкий бумажный цилиндр скатывается с наклонной поверхности стола
(рис.7.21а), то его вращение при падении со стола существенно изменяет
траекторию движения. Если без вращения его траектория описывалась бы
кривой 1, то вращение делает траекторию более крутой. Действительно, при
движении цилиндра по наклонной плоскости после отрыва вблизи поверхности
цилиндра за счёт сил вязкости реального газа образуется вращающийся по
часовой стрелке приповерхностный слой, в котором индивидуальные частицы
участвуют в сложном поступательно-вращательном движении. Это сложное
движение в соответствии с законом суперпозиции может быть представлено в
виде суммы двух простейших движений идеального газа: плоского
поступательного и вращательного с постоянной циркуляцией. Поэтому в
верхнем полупространстве над цилиндром скорости двух движений
вычитаются и согласно уравнению Бернулли здесь давление больше, а в
нижнем - складываются и давление меньше. В результате возникает
результирующая подъёмная сила, которая в соответствии с правилом
Жуковского делает траекторию цилиндра более крутой.
106
а)
б)
в)
Рис. 7.21
Известно, что должным образом закрученные шарик пинг-понга,
теннисный, волейбольный и футбольный мячи могут описывать довольно
сложные траектории. Так, например, чтобы траектория шарика пинг-понга над
столом была круче, то игроку при не сильной подаче необходимо закрутить его
по часовой стрелке (рис. 7.21б). Возникающая в этом случае подъёмная сила
«прогнёт» траекторию полёта вниз и шарик, достигнув апогея над сеткой на
другой площадке, при падении вниз будет двигаться по более крутой
траектории, чем без закрутки. При сильной подаче теннисного мяча
профессионалом и закрутке его против часовой стрелки противнику кажется,
что мяч ударится в сетку. Однако возникающая подъёмная сила «поднимет» мяч
над сеткой и сделает траекторию более пологой с крутым падением его в конце
площадки. Аналогичного эффекта добиваются и футболисты-профессионалы
при подаче крученых штрафных мячей, огибающих стенку из футболистовсоперников перед воротами.
В 1924 г. английским ученым Флеттнером было сконструировано и
построено роторное судно, использующее рассматриваемый эффект. На судне
были установлены два легких, обтянутых парусиной цилиндра, которые
приводились во вращение моторами. Диаметр цилиндров был 2.8 м, высота 18
м. Такое судно развивало скорость около 15 км/час. Причем естественно, что
максимальная скорость развивалась при боковом ветре, когда «подъемная» сила
направлена вдоль корпуса судна от кормы к носовой части. Однако это
изобретение не получило своего дальнейшего развития в связи с быстрым
строительством дизельных двигателей. Эффект Магнуса является также одной
из причин отклонения траектории вращающегося снаряда из вертикальной
плоскости, проходящей через ось ствола орудия (явление деривации).
Снова обратим внимание на то, что в идеальной среде, лишённой трения,
нельзя, вращая цилиндр, создать в ней вращательное движение. Только
благодаря вязкости реальной среды вращающийся цилиндр создает вокруг себя
вращательное движение, которое вдали от тела можно считать потенциальным.
Отвлекаясь от причин, создавших вращательное потенциальное движение,
удаётся в рамках модели идеальной среды рассмотреть и объяснить многие
явления, наблюдаемые в реальных средах.
Рассмотренный метод суперпозиции потенциальных потоков, как и метод
конформных отображений, позволяет составлять из известных простейших
движений идеальной среды такие движения, которые были бы близки по
свойствам к движениям среды в реальных задачах, имеющих практическое
значение.
107
7.8. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД
7.8.1. Постановка задачи и сущность метода
Суперпозицию плоских потенциальных потоков можно осуществлять и
графически. Представим себе, что на плоскости нанесены линии тока какихлибо двух плоских потоков (рис. 7.22). Можно в точках пересечения линий тока
построить в одинаковом масштабе вектора скоростей движений среды в обоих
потоках. Очевидно, скорость результирующего движения в этих точках
изобразится диагональю параллелограмма, построенного на векторах,
изображающих скорости отдельных движений. Причем такое построение будет
тем точнее, чем чаще нанесены линии тока рассматриваемых потоков.
Рассмотрим вопрос о масштабах изображения слагаемых потоков. Для
этого обратимся к рис. 7.23. В пределах малых участков линий тока их можно
считать прямыми. Для того чтобы отрезки l1 и l2 изображали модули
скоростей υ 1 и υ 2 в одинаковых масштабах, необходимо, чтобы выполнялись
следующие условия:
1 2
1 l1
,
.
l1 l2
2 l2
Из подобия прямоугольных треугольников получаем:
h1 l1
, h1 2 h21 .
h2 l2
2 const
2
υ
υ2
h2
υ1
1 const
(7.8.1.22)
υ2
l2
1
l1
h1
Рис. 7.22
υ
υ1
Рис. 7.23
Но произведение h2 1 Q1 определяет расход среды между двумя соседними
линиями тока ψ1 первого потока, а произведение h1 2 Q2 расход среды
между двумя соседними линиями тока ψ2 второго потока. Поэтому, для того
чтобы масштабы изображений складываемых потоков были одинаковыми,
необходимо, чтобы расходы среды между двумя соседними линиями тока в
обоих движениях были равны, т.е.
108
Q1 Q2 ,
1 1II 2I 2II ,
(7.8.2.23)
Рассмотрим
в
качестве
примера
суперпозицию двух потоков прямолинейного
поступательного потока и плоского источника.
Очевидно, что в плоском источнике линии тока
представлены радиусами, проведёнными из
const
точки, в которой расположен источник (рис.
7.24). Эквипотенциальные линии ( const )
представляют собой окружности с центром в
источнике.
Рис. 7.24
Если мощность источника равна Q , то,
принимая во внимание, что в таком движении скорость среды в любой точке
направлена вдоль радиусов, проведённых из центра источника, скорость потока
на расстоянии r от источника равна:
const
Q 2r ,
Q
.
2r
(7.8.3.24)
Будем предполагать, что оба потока изображены в одном масштабе, т.е. расход
жидкости между двумя соседними линиями тока прямолинейного
поступательного потока равен расходу жидкости между соседними линиями
тока плоского источника (рис. 7.25).
Рассмотрим линию тока ОО1 прямолинейного поступательного потока,
проходящую через центр плоского источника О. Так как скорость этого потока
y
B
О1
A
xчxx
x
Рис. 7.25
постоянна и равна υ , а скорость υ вдоль линии тока плоского источника
возрастает неограниченно с приближением к его центру согласно (7.6.24), то на
линии ОО1 всегда найдется точка А, в которой результирующая скорость равна
109
нулю. Откладывая затем в точках пересечения линий тока двух потоков
значения скоростей υ и υ , модуль которой вычислен согласно (7.6.24); для
заданного угла по найденному графически или расчётному значению r
можно по правилу параллелограмма вычислить скорость суммарного движения.
Причем эти суммарные вектора скоростей являются касательными к линии тока
ВА.
Линия АВ разграничивает среду, вытекающую из источника О, от
набегающего потока. Так как при обтекании идеальной средой поверхность
тела также является граничной линией тока, через которую среда не протекает,
то можно линию АB отождествить с линией, которая описывает контур
некоторой твердой поверхности, обтекаемой прямолинейным поступательным
потоком. Вычисляя скорости отдельных движений в каждой точке пересечения
линий тока двух потоков, можно найти в этих точках
скорость
результирующего движения. Воспользовавшись формулой Бернулли, можно
вычислить давление в каждой точке потока, в том числе и на поверхности
обтекаемого тела, изображаемой на плоскости линией АB. Суммируя силы
давления, действующие на элементы поверхности тела, можно найти
результирующую силу, действующую на обтекаемое тело.
Таким образом, комбинация плоскопараллельного поступательного
потока с источниками и стоками позволяет получить картину обтекания
некоторого замкнутого контура, форма которого может быть довольно сложной
в зависимости от интенсивности отдельных слагаемых движений. Добавление
еще нескольких источников и стоков различной мощности позволит
представить картину обтекания тела практически любой формы. Конечно, все
операции сложения потенциальных потоков можно провести и аналитически.
Однако во многих случаях графический метод может дать достаточно точный, а
главное наглядный результат, необходимый для решения некоторой конкретной
практической задачи.
7.9. ДВИЖЕНИЕ БЕСКОНЕЧНОГО ЦИЛИНДРА В ИДЕАЛЬНОЙ
НЕСЖИМАЕМОЙ СРЕДЕ
7.9.1. Постановка задачи и методика решения
При решении задач о движении идеальной среды можно обратиться и
непосредственно к уравнениям движения с соответствующими граничными
условиями. В качестве примера рассмотрим движение бесконечного цилиндра в
идеальной несжимаемой среде (рис. 7.26). Заметим, что такое движение можно
рассматривать как плоское. Будем также полагать, что движение среды,
вызываемое движением в
r
r
y
s
n
υ
S
r0
u
x
Рис. 7.26
110
нем
цилиндра,
является
потенциальным.
Существенное
отличие поставленной задачи от
задачи
обтекания
неподвижного
цилиндра
плоскопараллельным
поступательным потоком заключается
в том, что рассматриваемое движение
не
является
стационарным
в
неподвижной
системе
координат.
Действительно, по мере продвижения
цилиндра в неподвижной среде
скорость индивидуальной частицы в
каждой фиксированной точке
пространства изменяется с течением времени. Вдали от цилиндра (на
бесконечности0 будем полагать среду неподвижной. Несмотря на то, что задача
является нестационарной, потенциал скорости должен удовлетворять
уравнению Лапласа, не содержащему времени явно, т.е. 0 .
Так как на бесконечности υ 0 , но υ , то производные по
координатам должны на бесконечности обращаться в нуль. Известно, что
такими производными для цилиндрических задач являются производные ln r
по координатам, начиная с первого порядка и выше, т.е. ( r ) ln r или ln r .
Так как есть скалярная функция, а ln r есть вектор, то общее выражение
для искомого потенциала скорости должно иметь вид:
A ln r.
(7.9.1)
Здесь вектор A есть некоторый независящий от координат вектор, который
может быть связан только с единственным, имеющимся в нашем распоряжении
вектором, от которого может зависеть решение - вектором скорости движения
цилиндра u . Эта связь может быть установлена из граничных условий на
поверхности цилиндра:
n
n un ,
r r0
nu
r r0
.
(7.9.2)
Поскольку n r / r r , то из (7.9.1) следует
1
r
A r
A n
r
A 2 .
r
r
(7.9.3)
Используя (7.9.3), можно определить градиент потенциала скорости в виде
A n
r
A n
1
A n A n 2 2 n .
r
r
r
r
После подстановки (7.9.3) в (7.9.2) можно получить
(7.9.4)
A n n n
r
2
111
r r0
(n u)
r r0
, A r02 u .
(7.9.5)
Таким образом, потенциал скорости определяется соотношением
r02
2 r u .
r
(7.9.6)
Скорость движения индивидуальной частицы среды по определению равна
r02 r02
r02
υ r u 2 2 r u 2 2n u n u .
r
r
r
(7.9.7)
Из определения вектора скорости υ согласно (7.9.7) и рис.7.26 легко
найти компоненты скорости r и S :
r
r02
u cos ,
r2
s
r02
u sin .
r2
(7.9.8)
Данные значения компонент скоростей определены в системе координат,
двигающейся со скоростью u . В этой системе координат ни r , ни r и S не
зависят от времени t.
Таким образом, в каждый момент времени распределение скоростей
вокруг двигающегося цилиндра удовлетворяет уравнениям (7.9.8). Поэтому с
точки зрения наблюдателя, двигающегося вместе с цилиндром, картина
движения среды около цилиндра стационарна.
Следует заметить, что из полученного решения можно получить
обтекание неподвижного цилиндра, если на движение, описываемое
формулами (7.6.32), наложить движение всей среды вместе с цилиндром с
постоянной скоростью u , направленной справа налево. Тогда будет иметь место
обтекание неподвижного цилиндра плоскопараллельным поступательным
потоком с направленной справа налево скоростью u . Распределение скоростей
такого движения описывается полученными выше формулами (7.6.9), если в
них изменить знак скорости набегающего потока и заменить скорость
скоростью u :
r02
r u (1 2 ) cos ,
r
r02
s u (1 2 ) sin ,
r
(7.9.8а)
7.9.2. Распределение давления около движущегося цилиндра
Найдем распределение давления на поверхности цилиндра. Для этого
воспользуемся уравнением Бернулли в форме (7.5.3), в котором для
рассматриваемого нестационарного потенциального движения идеальной
среды в отсутствии массовых сил баротропный потенциал равен Ф(P)=P/ρ:
112
2 P
2 P
.
t
2 t 2
(7.9.9)
Так как на бесконечности жидкость покоится, т.е. υ 0 и t 0 , то
давление P(r) в любой точке среды равно
P (r ) P
2
2
.
t
(7.9.10)
Из (7.9.6) следует, что потенциал скорости r, u в нестационарной
постановке может явно или неявно зависеть от времени t , т.-е., если потенциал
и зависит от времени, то неявно через зависимость от времени скорости
движения индивидуальной частицы, т.е. u = u (r, t). Формула (7.9.8) описывает
зависимость потенциала и от координаты точки r около цилиндра в тот же
момент времени. Зависимость r от времени очевидная, если r(t ) характеризует
точку в неподвижной системе координат. Но в такой нестационарной
постановке задачи вся стационарная картина обтекания движется в
неподвижной системе координат со скоростью u , поэтому dr dt u .
Дифференцируя потенциал по времени t как сложную функцию, получаем
du d r
.
t u dt r d t
(7.9.11)
Используя (7.9.6), можно получить слагаемые в правой части (7.9.11) в виде:
r02
du
du
2 r ,
u dt
r
dt
r02
dr
u 2 2u n n u u .
r dt
r
Таким образом, производная / t равна
r2
du r02
02 r
2u n n u u .
t
r
dt r 2
(7.9.12)
На поверхности цилиндра ( r r0 ) производная / t равна
t
r0 n
r r0
du
2u 2 cos 2 u 2 .
dt
(7.9.13)
Квадрат модуля скорости с использованием (7.9.8) равен
2 (r r0 ) r2 s2 u 2 .
(7.9.14)
Подставляя полученные выражения (7.9.13, 14) в (7.9.10), получим следующую
формулу для распределения давления по поверхности цилиндра:
P ( r r0 ) P
u2
2
r0
du
cos 2 u 2 cos 2 .
dt
(7.9.15)
113
Если движение цилиндра стационарное, т.е. du / dt 0 , то из (7.9.15)
следует:
P(r r0 ) P
u 2
2
(1 4 cos 2 ) .
(7.9.15а)
При / 3, 2 / 3 давление на поверхности цилиндра в точках С и D равно
давлению в набегающем потоке PC PD P (сравни с рис.7.18). При
/ 2, 3 / 2 и 0, давление является наибольшим и наименьшим
соответственно:
PE PF P
u 2
2
,
PA PB P
u 2
2
.
(7.9.15б)
Таким образом, в отличие от обтекания неподвижного цилиндра при
движении цилиндра с постоянной скоростью u силы давления со стороны
идеальной среды стремятся «сжать» его в направлении, перпендикулярном
движению, и растянуть в направлении движения, т.е. среда как бы препятствует.
движению цилиндра.
7.9.3. Сила сопротивления движущегося шара. Присоединенная масса
Вычислим согласно (7.6.21) силу лобового сопротивления Fx , которую
испытывает единица длины цилиндра при своем нестационарном движении в
среде со скоростью u = u(t) в направлении оси х по формуле
2
Fx P cos r0 d .
0
После подстановки (7.6.39) в данное определение Fx , получим:
2
du
du 1
du
Fx r
cos 2 d r02 sin 2 r02
. (7.9.16)
dt
dt 4
2 0
dt
0
2
2
0
Остальные слагаемые обращаются в нуль в виду интегрирования по полному
периоду изменения угла .
Направление силы сопротивления, как видно из формулы (7.9.16),
зависит от знака производной du/ dt . Если цилиндр двигается слева направо
(рис. 7.26) с ускорением ( du / dt 0 ), то сила сопротивления направлена справа
налево, т.е. она отрицательная и препятствует ускорению движения. Если при
движении в том же направлении цилиндр двигается с замедлением, то сила
сопротивления действует в сторону движения цилиндра, т.е. она положительная
и стремится ускорить его движение.
При равномерном движении цилиндра du / dt 0 и имеет место парадокс
Даламбера Fx.=0. Таким образом, парадокс Даламбера не имеет места и при
движении цилиндра с ускорением или замедлением.
114
В силу симметрии движения относительно оси y очевидно, что подъемная
сила Fy равна нулю. В этом нетрудно убедиться и аналитически.
Запишем уравнение движения цилиндра в проекции на ось x ,
направленную вдоль скорости u . Пусть на цилиндр единичной длины
действует некоторая внешняя сила F , вызывающая его движение в среде и
направленная также вдоль выбранной оси. Если М есть масса единицы длины
цилиндра, то с учётом (7.9.16) уравнение движения в соответствии со вторым
законом Ньютона имеет вид (если через FH обозначить силу Ньютона):
M
du
du
FH F FH r02
,
dt
dt
M r du F
2
0
dt
H
.
(7.9.17)
Таким образом, уравнение движения (7.9.17) аналогично уравнению
Ньютона в отсутствии силы сопротивления, но с массой тела, увеличенной на
r02 M пр , которую называют присоединённой массой.
величину
Присоединенная масса M пр зависит от формы тела, и для цилиндра единичной
длины и шара она равна
M прцил r02 Vцил ,
2
1
3
2
M пршар r03 Vшар .
(7.9.18)
В случае тела произвольной формы присоединённая масса является
тензорной величиной и может быть вычислена для тела любой геометрической
формы. Присоединённая масса является геометрической характеристикой
формы тела, обтекаемого средой, определяется плотностью среды, в которой
тело двигается, и зависит от его ориентации в набегающем потоке. Действие
силы, связанной с присоединённой массой, аналогично действию силы
инерции.
Если присоединенная масса значительно меньше массы тела, то ею
можно пренебречь и рассматривать обычное уравнение движения, как,
например, в случае движения тяжелых тел в воздухе, плотность которого при
атмосферном давлении на три и даже четыре порядка меньше, чем плотность
твёрдого тела. Однако в некоторых случаях это не так, и в уравнениях движения
следует учитывать присоединённую массу (например, движение подводной
лодки, масса которой по порядку величины сравнима с присоединённой
массой, или движение воздушных шаров и дирижаблей).
В качестве примера рассмотрим движение воздушного шара,
наполненного газом. Пусть масса воздушного шара вместе с находящимся в
нем газом, оболочкой и гондолой равна М1, а масса вытесненного им воздуха
равна М0. На шар действуют выталкивающая архимедова сила FA и сила
тяжести FT. Сопротивлением воздуха можно пренебречь. Тогда уравнение
движения имеет вид:
115
FA FT F M 1а, ( M 0 M 1 )g M 1a .
(7.9.19)
Уравнение движения в форме (7.9.19) получено для случая движения шара под
действием силы ΔF с переменной скоростью u at . С увеличением скорости
увеличивается и сила сопротивления воздуха, которая затормаживает движение
шара, уменьшая его скорость. Через некоторое время эта сила сопротивления
уравновесит разгоняющую шар силу F , и он будет двигаться с постоянной
скоростью u const . Но если скорость u изменяется со временем, то в правой
части (7.9.19) необходимо учесть присоединённую массу шара. В этом случае
уравнение движения шара имеет вид:
M
( M 0 M 1 ) g M 1 0 .
2
(7.9.20)
Из сравнения (7.9.19) и (7.9.20) получаем:
M
M 1 M 1 0 ,
2
1 M0
1
.
2 M1
(7.9.21)
Если M 0 M 1 , то из (7.9.21) следует, что с учётом присоединённой массы
ускорение воздушного шара в 3/2 раза меньше, чем без ее учёта. Поэтому на
практике воздушный шар сразу после отрыва вначале «как бы нехотя» начинает
движение, постепенно ускоряясь до некоторой постоянной скорости,
соответствующей равенству силы сопротивления воздуха и разности силы
архимедовой и силы тяжести шара.
На практике проявление эффекта присоединённой массы можно
наблюдать на таких примерах. Так, капитаны подводных лодок, надводных
кораблей и судов для предотвращения столкновения с причалом должны
учитывать эффект присоединённой массы при расчёте расстояния до причала,
на котором необходимо сбавить обороты судовых двигателей до минимальных
(нулевых). При торможении судна на него действует гидродинамическая сила,
препятствующая торможению и стремящаяся двигать судно в прежнем
направлении.
Даже при движении тяжёлых тел в воздухе в некоторых случаях
необходимо учитывать эффект присоединённой массы. Можно показать, что
часы со сферическим маятником при движении в воздухе будут отставать в
сутки на несколько секунд, если не учитывать присоединённую массу.
7.10. ЧИСЛЕННЫЕ МЕТОДЫ В МЕХАНИКЕ СПЛОШНЫХ
ИДЕАЛЬНЫХ СРЕД
7.10.1. ВВЕДЕНИЕ
Начиная с середины 20-го века, интенсивно развиваются методы
приближенного численного решения уравнений газовой динамики. Именно эти
методы и составляют теперь наряду с физическим экспериментом, главные
инструменты исследования задач механики жидкости и газа[1] .
Чтобы понять причины быстрого распространения вычислительных
методов в рассматриваемой области механики, достаточно обратить внимание
на особенности основных уравнений движения сплошных текучих сред.
Характерными чертами большинства практически интересных задач являются
многомерность и нелинейность, из-за чего возможность их аналитического
решения становиться, по существу, нереальной. Даже в случае линейных задач
возникают затруднения, если расчетная область имеет достаточно сложную
форму. К этому стоит добавить, что в решении могут встречаться особые точки,
а сами уравнения менять свой тип (например, когда число Маха становиться
равным единице). Поэтому вполне естественно, что общие идеи, относящиеся к
отысканию приближенных численных решений уравнений, сразу нашли в
задачах гидрогазодинамики самую благодатную почву.
Численные методы широко используются для решения обыкновенных
дифференциальных, интегральных и интегро-дифференциальных уравнений, к
которым сводятся отдельные задачи механики жидкости и газа [2]. Однако
самый значительный вклад в гидрогазодинамику связан с применением
численных методов к непосредственному интегрированию уравнений в
частных производных, описывающих движение, тепломассообмен и более
сложные физические явления в жидкостях и газах. В ряде случаев численное
моделирование становиться основным способом исследования задач (движение
тел с космическими скоростями, в агрессивных средах, и т. п.).
Развитие численных методов не обесценило традиционные
аналитические подходы, но несколько изменило их роль. Так, асимптотические
методы, будучи средством исследования предельных режимов течений, дают
информацию о порядках величин искомых функций, масштабах их изменения в
тех или иных частях расчетных областей, необходимую для того, чтобы
постановка задач численного моделирования учитывала особенности
изучаемого явления. Аналитические решения, обычно относящиеся к
упрощенным частным случаям, имеют значительную ценность как «эталоны»
для оценки свойств разностных схем и точности численных решений.
117
Естественно, что в развитии численных методов возник ряд
собственных проблем. Среди центральных находится вопрос об адекватности
численных результатов решению исходной задачи. Ниже проводится краткий
обзор численных методов, применяемых в газовой динамике [1]. Излагаются
основные принципы численных методов, рассматривается применение
нестационарного метода потоков к описанию обтекания прямоугольного
выступа идеальной средой.
7.10.2. КРАТКАЯ ХАРАКТЕРИСТИКА ЧИСЛЕННЫХ МЕТОДОВ
7.10.2.1. Метод конечных разностей
Существует много универсальных численных методик, которые
применяются для решения нелинейных дифференциальных уравнений в
частных производных. Отметим некоторые из них.
Этот численный подход более всего развит в данное время и широко
используется для решения как линейных, так и нелинейных уравнений
гиперболического, эллиптического и параболического типа. Область
интегрирования здесь разбивается на счетные ячейки с помощью некоторой,
как правило, прямоугольной фиксированной сетки. Производные функции по
всем направлениям заменяются конечными разностями с помощью тех или
иных соотношений (приемы построения разностных уравнений весьма
разнообразны). Причем, чаще всего используются так называемые неявные
схемы. Тогда на каждом шаге приходится решать систему линейных
алгебраических уравнений, содержащих иногда несколько тысяч неизвестных.
Литература по этому направлению очень обширна (см., например [1-3]). Много
внимания при этом уделяется исследованию свойств разностных уравнений
(точность аппроксимации, условия устойчивости, диссипативные эффекты схем
и т.п.).
7.10.2.2. Метод интегральных соотношений
В этом методе, представляющем собой обобщение известного
численного метода прямых, область интегрирования разбивается на полосы с
помощью кривых линий, форма которых определяется видом границ этой
области. Система уравнений в частных производных, записанная в
дивергентной форме, интегрируется поперек этих полос, а затем
подынтегральные
функции
представляются
определенными
интерполяционными выражениями (консервативно-дифференциальные схемы).
Полученная в результате аппроксимирующая система обыкновенных
дифференциальных уравнений интегрируется численно. Основная трудность
118
здесь состоит в решении краевой задачи для системы высокого порядка. Метод
интегральных соотношений, как и метод конечных разностей, применим к
уравнениям различных типов.
7.10.2.3. Метод характеристик
Данный подход применяется только для решения уравнений
гиперболического типа. Решение здесь рассчитывается с помощью
характеристической сетки, которая выстраивается в процессе счета. Могут,
однако, использоваться и такие схемы метода характеристик, в которых расчет
введется по слоям, ограниченным фиксированными линиями. Большое
внимание уделялось разработке характеристических подходов для решения
пространственных задач.
Метод характеристик позволяет точно определить место возникновения
вторичных ударных волн внутри поля течения как результат пересечения
характеристик одного семейства. Однако, если таких ударных волн появляется
много, то встречаются трудности при расчете. Кроме того, в процессе
вычислений может наблюдаться значительная деформация расчетной сетки. В
этой связи, методом характеристик целесообразно рассчитывать такие задачи
гиперболического типа, в которых число разрывов невелико (например,
установившиеся сверхзвуковые задачи газовой динамики), или использовать
комбинации сеточных и характеристических методик.
7.10.2.4. Метод частиц в ячейках
Указанное направление численного моделирования сочетает в себе в
определенных чертах преимущества лагранжева и эйлерова подходов. Область
решения здесь разбивается неподвижной (эйлеровой) сеткой; однако сплошная
среда трактуется дискретной моделью – рассматривается совокупность частиц
фиксированной массы (лагранжева сетка частиц), которые и перемещаются
через эйлерову сетку ячеек. Частицы служат для определения параметров самой
жидкости (массы, энергии, скорости), в то время как эйлерова сетка
используется для определения параметров поля течения (давления, плотности,
температуры).
Метод частиц в ячейках позволяет исследовать сложные явления в
динамике многокомпонентных сред, взаимодействия разрывов, поскольку
частицы хорошо «следят» за свободными поверхностями и линиями раздела
сред. Однако дискретный метод частиц обладает и рядом недостатков. Главный
из них, лежащий в самой природе метода, состоит в том, что из-за дискретного
представления сплошной среды (конечное число частиц в ячейке) методу
присуща вычислительная неустойчивость (флуктуации). Затруднительно также
119
получение информации для сильно разреженных областей, откуда практически
уходят все частицы, и т. п.
7.10.2.5. Метод конечных элементов
В этом методе исходные уравнения и динамические краевые условия
удовлетворяются только в некотором осредненном смысле для выбранного
типичного конечного объема («элемента») среды. При этом аппроксимация
различных полей проводится на конечном элементе локально и независимо от
его положения в общей модели. Основная сфера приложения указанного
подхода – это механика твердого деформированного тела. На основе данного
метода построен известный программный комплекс ANSYS.
Такой способ построения численного решения отличается от
традиционных разностных схем в первую очередь принципом построения
континуального приближенного решения. Так, в разностных схемах
обязательно присутствуют этапы дискретизации, а затем уже проводиться
восполнение полученного дискретного решения до континуального. Причем,
обычно эти процедуры жестко между собой не связаны, что порождает
известную неоднозначность континуального восполнения (особенно
характерную для схем второго и выше порядков аппроксимации). В методе
конечных элементов с самого начала построения численного решения ищется
наилучшее (в той или иной норме) приближение точного решения в некотором
пространстве (обычно это пространство кусочно-гладких функций). Таким
образом, в этом подходе как бы отсутствует этап восполнения. В целом можно
считать подобные аппроксимации математически более строгими и более
удобными для обоснований.
С другой стороны, методики этого типа имеют свою область применения
и свои характерные трудности. По способу представления приближенного
решения (которое обычно непрерывно или непрерывно с рядом производных)
такие подходы, прежде всего, приспособлены для нахождения решения задач
эллиптического и параболического типов. При решении гиперболических задач
методы конечных элементов нельзя считать достаточно эффективными.
Основная причина заключается в том, что здесь полностью отсутствует
использование такого фундаментального свойства гиперболических задач, как
конечность области влияния. Это приводит к неестественному «завязыванию»
всех узлов расчетной области, следствием чего являются неоправданно высокие
(для задач гиперболического типа) требования к объему используемой памяти
ЭВМ.
7.10.2.6. Метод дискретных вихрей
Указанный метод получил наибольшее распространение для расчета
отрывных течений на основе модели идеальной несжимаемой жидкости.
120
Непрерывные вихревые слои, моделирующие несущие поверхности и их следы,
заменяются системой дискретных вихрей – прямолинейных и кольцевых (в
зависимости от формы несущих поверхностей). Временной процесс
представляется в виде последовательности расчетных слоев, причем граничные
условия задачи выполняются в конечном числе контрольных точек на несущих
поверхностях.
7.10.2.7. Статистические методы
Быстрое развитие вычислительной техники стимулировало разработку
численных методов статистического моделирования (методы Монте-Карло)
широкого класса задач механики жидкости, физики, биологии, химии. Этот
класс задача условно можно разделить на два вида:
1. Задачи со стохастической природой. Для данных задач метод МонеКарло используется для прямого моделирования естественной вероятностной
модели. При этом точная динамика заменяется стохастичным многомерным
процессом;
2. Детерминированные задачи. Указанные задачи описываются вполне
определенными уравнениями. Здесь искусственно строится вероятностный
процесс, который численно моделируется методом Монте-Карло на ЭВМ, что
позволяет получить формальное решение в виде статистических оценок. При
этом необходимо показать адекватность построенного вероятностного процесса
рассматриваемому кинетическому уравнению.
В механике сплошных сред метод статистического моделирования (в
комбинации с методом расщепления нашел широкое применение при
исследовании течение разреженных газов, описываемых уравнением Больцмана
и при изучении нестационарных турбулентных процессов, имеющих
стохастическую природу.
Как обычно для подходов указанного типа, моделируемая среда здесь
заменяется конечномерной системой частиц (молекул) фиксированной массы,
для которой с помощью методов Монте-Карло проводится численное
моделирование вероятностного процесса. В работе [4] показана
принципиальная возможность построения и реализации таких численных
алгоритмов. Однако данный подход носит эвристический характер и выдвигает
очень высокие требования к ресурсам ЭВМ.
121
7.10.3. ОСНОВЫ ЧИСЛЕННЫХ МЕТОДОВ
7.10.3.1. Задача интерполирования
При вычислениях оперируют с сеточными функциями, т.е. функциями,
заданными на дискретной совокупности точек – узлов сетки [1-3]. Если нужно
знать значения f (x) при x , не совпадающих с узлами, то поступают
следующим образом. Строят некоторую достаточно простую функцию (x) ,
которая совпадет с f (x) в узлах x0 , x1 , , xn . В промежуточных значениях x
функция (x) приближенно представляет функцию f (x) . Эту функцию
называют интерполирующей, а задачу ее отыскания – интерполированием.
К задаче интерполирования прибегают часто и тогда, когда
аналитическое представление функции f (x) достаточно сложное и требуется
много времени для ее вычисления. В таком случае может оказаться выгодным
вычислить f (x) лишь в нескольких опорных точках x0 , x1 , , xn , построить
более простую интерполирующую функцию (x) и использовать ее для
вычислений. При этом, конечно, нужно знать, какая погрешность допускается
при замене f (x) на (x) .
7.10.3.2. Интерполяционный многочлен Лагранжа
Рассмотрим простейший и самый распространенный случай, когда (x)
- многочлен. Требуется построить многочлен Pn (x) степени n , который в
заданных точках a x0 , x1 , , xn b (узлах интерполирования) принимает
заданные значения f ( x0 ), f ( x1 ), , f ( xn ) . Легко доказать, что такой многочлен
только один. При помощи простых выкладок можно построить
интерполяционный многочлен вида [5]
n
Ln ( x) f ( xi )
i 0
n ( x)
,
( x xi ) n' ( xi )
(7.10.1)
где
n
n ( x) ( x xi ) .
(7.10.2.)
i 0
Интерполяционный полином (7.10.1) называют интерполяционным полиномом
Лагранжа.
122
7.10.3.3. Погрешность интерполирования
Для получения информации о погрешности интерполирования
необходимо оценить разность Rn ( x) f ( x) Ln ( x) , считая функцию f (x)
достаточно гладкой. Можно получить [5]:
Rn ( x)
1
f ( n1) ( ) n ( x),
(n 1)!
(7.10.3)
где (x) - точка, в которой u ( n1) ( x) 0 , причем u ( x) f ( x) Ln ( x) k ( x) ,
k - некоторая постоянная, которая выбирается так, чтобы в некоторой точке
x x' , не совпадающей ни с одним из узлов интерполяции x0 , x1 , , xn ,
функция u (x ) обратилась в нуль. Подробнее см. [5].
Формула (7.10.3) позволяет оценить погрешность полиномиальной
интерполяции, если известна оценка для производной f ( n1) ( x) . Полагая
M n1 max f ( n1) ( x) ,
(7.10.4)
M n1
n ( x) .
(n 1)!
(7.10.5)
x[ a ,b ]
имеем
Rn ( x)
7.10.4. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ
7.10.4.1. Квадратурные формулы Ньютона-Котеса
b
f ( x)dx
Пусть необходимо вычислить интеграл
на отрезке [a,b] .
a
Разобьем интервал на n частей узлами a x0 x1 xn b . Функцию f (x)
заменим интерполяционным многочленом
f ( x) Ln ( x) Rn ( x) ,
(7.10.6)
где Rn (x) оценивается по формуле (7.10.3). Тогда имеем
b
b
f ( x)dx L ( x)dx R
n
a
n
,
a
где Rn - погрешность интегрирования. Из (7.10.5) следует, что
(7.10.7)
123
Rn (max f
( n 1)
x
b
( x) )
a
n ( x)
(n 1)!
dx .
(7.10.8)
Подставляя (7.10.1) в (7.10.7), получим
b
n
a
i 1
f ( x)dx A
f ( xi ) ,
(7.10.9)
n ( x)
dx
'
(
x
x
)
(
x
)
i
n
i
a
(7.10.10)
i
где
b
Ai
- коэффициенты квадратурной формулы. Формулы (7.10.9) называют
формулами Ньютона-Котеса. Рассмотрим частные случаи.
7.10.4.2. Формула трапеций
Пусть n 1 , тогда x0 a , x1 b , 1 ( x) ( x a)( x b). Коэффициенты
A0 , A1 легко вычислить: A0 A1 (b a) / 2. Таким образом
b
f ( x)dx
a
ba
( f (a) f (b) .
2
(7.10.11)
Формулу (7.10.11) называют формулой трапеций. На практике эту
формулу применяют не ко всему отрезку сразу, а разбивают его на интервалы.
(b a )
Пусть h
, xi a ih . Применяя формулу (7.10.11) к каждому из
n
интервалов xi , xi 1 и суммируя, получаем
b
f ( x)dx
a
h
f (a) 2 f ( x1 ) 2 f ( xn1 ) f ( xn ) .
2
(7.10.12)
7.10.4.3. Формула Симпсона
Рассмотрим теперь случай n 2 узлы интерполирования следующие
x0 a, x1 (b a) / 2, x2 b . Коэффициенты имеют вид A0 A2 (b a) / 6 ,
A1 4(b a) / 6 . Таким образом,
b
f ( x)dx
a
ba
a b
f ( a) 4 f
f (b) .
6
2
(7.10.13)
Формулу (7.10.13) называют формулой Симпсона. Разделив отрезок a, b на
2n частей и применив к интервалам xi , xi 2 формулу (7.10.13), получаем
124
b
a
f ( x)dx
h
f (a) 4 f ( x1 ) 2 f ( x2 ) 4 f ( x3 ) 4 f ( x2n1 ) f ( x2n ).(7.10.14)
3
7.10.5. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ
Если функция f (x) задана в точках x0 x1 xn , то естественным
способом вычисления ее производной является дифференцирование
интерполяционного многочлена. Интерполяционный многочлен Лагранжа
(7.10.1) приближает функцию f (x) с погрешностью Rn (x) , поэтому замена k ой производной f (x) k -ой производной полинома Лагранжа порождает
погрешность
n
k!
f ( n i 1) ( i ) n( k i ) ( x) ,
i 0 ( k i )!( n i 1)!
Rn( k ) ( x)
x0 i x n .
(7.10.15)
(7.10.16)
Рассмотрим случай k 1 при равноотстоящих узлах xi x0 ih ,
i 0, 1, , n . Легко показать, что в этом случае выражения для вычисления
производной будут выглядеть так:
f ' ( x0 )
f ( x0 ) f ( x1 ) 1 ''
f ( )h ,
h
2
f ' ( x1 )
f ( x0 ) f ( x1 ) 1 ''
f ( )h ,
h
2
(7.10.17)
(7.10.18)
Эти формулы называют односторонними аппроксимациями первой производной
функции f (x) соответственно вперед и назад; они имеют погрешность O(h) ,
т.е. аппроксимируют первую производную с первым порядком точности.
Формулы для производных при n 2 имеют вид:
f ' ( x0 )
1
3 f ( x0 ) 4 f ( x1 ) f ( x2 ) 1 h 2 f ''' ( ) ,
2h
3
f ' ( x1 )
1
f ( x0 ) f ( x2 ) 1 h 2 f ''' ( ),
2h
6
(7.10.19)
125
f ' ( x2 )
1
f ( x0 ) 4 f ( x1 ) 3 f ( x2 ) 1 h 2 f ''' ( ).
2h
3
Порядок аппроксимации этих формул равен двум.
Для более детального ознакомления с формулами интерполирования,
численного интегрирования и дифференцирования и другими аспектами
численных методов можно порекомендовать [3, 5].
7.11. ПРИМЕНЕНИЕ МЕТОДА ПОТОКОВ В МЕХАНИКЕ
СПЛОШНЫХ ИДЕАЛЬНЫХ СРЕД
7.11.1. ОБЩИЕ ЗАМЕЧАНИЯ
Численное моделирование течений вязкого газа при различных числах
Рейнольдса оказывается весьма важным, так как экспериментальные
исследования в этой области являются весьма дорогостоящими и позволяют
получить лишь ограниченную информацию. Аналитические подходы часто
связаны со многими упрощающими предположениями, что значительно сужает
область их применения.
Разработка численных методик для расчетов указанного типа течений
представляет, таким образом, значительный интерес с практической точки
зрения, а также с позиции самой вычислительной математики, так как речь идет
о построении дискретной численной модели вязкого сжимаемого
теплопроводного газа, являющейся одной из самых сложных (и общих)
моделей в механике сплошной среды.
Следует отметить, что использовать модель Навье – Стокса (особенно
для объемных, многомерных задач) целесообразно, лишь для небольших и
умеренных чисел Re, где влияние молекулярной вязкости существенно. При
больших (турбулентных) числах Рейнольдса, когда образуется молярный
механизм переноса (где роль молекулярных эффектов незначительна), следует
рассматривать уже модели другого рода.
Не случайно, видимо, при больших значениях Re решение полных
уравнений Навье – Стокса с сохранением влияния членов молекулярной
вязкости весьма затруднительно. Основная трудность, возникающая при их
применении, состоит в достаточно точном «разрешении» структуры потока при
не слишком малых размерах расчетной сетки (шаг сетки должен быть таким,
126
чтобы погрешность аппроксимации конвективных членов была бы много
меньше разностных представлений вязкостных членов). Эта трудность может
быть частично преодолена применением сгущающихся в нужных местах сеток
и схем повышенной точности.
При расчете таких моделей на реальных («грубых») сетках формальное
решение может быть получено и для больших значений чисел Рейнольдса.
Однако, такое решение может, вообще говоря, не соответствовать уравнениям
Навье – Стокса, так как молекулярные эффекты здесь могут «забиваться»
схемной (эффективной) вязкостью, обеспечивающей вычислительную
устойчивость решения в целом. Данный подход (с приближенным механизмом
диссипации энергии) можно использовать лишь для задач, где влияние вязкости
незначительно и течение автомодельно по Re. Таким образом, представляется
важным, чтобы алгоритм расчета вязких течений позволял осуществить
предельный переход к моделям идеального газа, когда кинематическая вязкость
0.
Далее описывается один из численных подходов к изучению свойств
течений сжимаемого газа – метод потоков. Отличительная черта указанного
подхода заключается в численном решении с помощью консервативных
разностных схем общих нестационарных уравнений, записанных в виде
законов сохранения в интегральной форме для идеального и вязкого
теплопроводного сжимаемого газа. Такой подход позволяет, по существу,
избежать трудностей, связанных с аппроксимацией старших производных
уравнений Навье – Стокса. Разделение вектора плотности потока на
конвективную и вязкую составляющие дает возможность использовать данную
методику для расчета движений, как вязкой, так и идеальной среды.
7.11.2. ОПИСАНИЕ МЕТОДА ПОТОКОВ
В данном разделе будут изложены общие принципы построения
конечно-разностных схем метода потоков, разработанного Л.И. Севериновым и
А.В. Бабаковым, [6].
В переменных поля метод порождает явную разностную схему, которая
является условно – устойчивой и условно монотонной. Схема в силу способа ее
построения является консервативной по массе, по составляющим импульса и
полной энергии.
Решение задачи ищется в области , границы которой образованы
контуром обтекаемого тела и некоторой достаточно удаленной от тела
замкнутой поверхностью Г . Разобьем эту область на малые фиксированные в
пространстве объемы-ячейки V . Каждую ячейку будем характеризовать
массой m , составляющими импульса Pl (l x, y, z ) и полной энергией E газа,
находящегося в V .
127
Зная значения m, Pl и Е можно вычислить средние для данной ячейки
величины плотностей распределения перечисленных количеств:
m / V ,
pl Pl / V ,
E / V .
(7.11.1)
где - массовая плотность газа; pl - i – компонента плотности распределения
импульса; - плотность распределения полной энергии.
Полученные значения относятся к некоторым характерным точкам
объемов V (как правило, берется геометрический центр).
От функций pl и легко перейти к общепринятым переменным поля –
составляющим l вектора скорости υ и удельной внутренней энергии газа e :
l
p1
,
υ2
e .
2
(7.11.2)
Указанные значения приписываются тем же характерным точкам ячеек V , к
которым уже отнесены плотности распределения.
Используя некоторые процедуры интерполирования и численного
дифференцирования, определим значения переменных поля и первых
производных от l и e на границах S ячеек V . Знания этих величин
достаточно для того, чтобы вычислить на S векторы плотностей потоков массы
q m , составляющих импульса qlp единичную , и энергии газа q , где qlp - вектор
плотности потока импульса через площадку перпендикулярную оси l .
Выпишем теперь законы сохранения массы, импульса, и энергии,
определяющие фундаментальные свойства среды, в виде поверхностных
интегралов от векторов плотностей потоков q F по поверхности S каждой
ячейки V . В общем (нестационарном случае) эти законы имеют вид:
F
q F n dS ,
t
S
(7.11.3)
где q F - вектор плотности потока величины F {m, Pl , E}, n - единичный
вектор внешней к S нормали. Векторы плотностей потоков q F определяются
на поверхности S переменными газодинамического поля и их производными и
плотностями
распределения.
Уравнения
(7.11.3)
справедливы
для
произвольного объема, и естественно требовать их выполнения для
минимального объема-ячейки разностной сетки.
Естественными дополнительными условиями для системы (7.11.3)
являются значения векторов плотностей потоков каждого из количеств на
поверхностях, ограничивающих область интегрирования. Вид этих условий
зависит от рассматриваемой физической задачи.
128
Таким образом, сформулированная выше задача сводится теперь к
следующему: необходимо определить значения переменных газодинамического
поля и плотностей распределения в характерных точках объема V так, чтобы
уравнения (7.11.3) выполнялись с требуемой точностью для каждого
элементарного объема.
При численном решении интегралы в (7.11.3) вычисляются по
квадратурной формуле
F n1 F n
h QF n dS ,
S
(7.11.4)
где векторы плотностей потоков q F определяются по значениям плотностей
распределения и переменных газодинамического поля в характерных
внутренних точках объемов V . Величины F n1 вычисляются с погрешностью
O( 2 ) . Оператор h определяет конечно – разностное представление интеграла
по некоторой квадратурной формуле, зависящей от h - шага расчетной сетки.
Уравнения (7.11.4), выписанные для каждой аддитивной характеристики
среды m, Pl , E во всех элементарных объемах (ячейках), составляют систему
нелинейных
алгебраических
уравнений
относительно
переменных
газодинамического поля в одной точке элементарного объема (ячейки) V .
Система уравнений (7.11.4) вместе с соотношениями (7.11.1), (7.11.2),
дополненная уравнением состояния и граничными условиями, является
замкнутой.
Остановимся на отличительных чертах рассматриваемой численной
модели. Все переменные в (7.11.3) естественно разделяются на две группы:
первую – переменные газодинамического поля (составляющие вектора скорости
υ , давление P , температура T ) и вторую – переменные плотности
распределения количеств - потоки, для которых сформулированы законы
сохранения (7.11.3).
Переменные первой группы являются в физическом смысле активными,
интенсивными и имеют локальный характер. В их терминах формулируется
причинная часть законов переноса. В терминах переменных второй группы
формулируется количественная часть законов переноса, т.е. следствие.
Переменные этой группы, называемые экстенсивными, представляют собой
плотности распределения аддитивных характеристик среды. Например, поток
импульса определяется плотностью распределения импульса (экстенсивная
переменная), величинами газодинамического поля и их производными
(интенсивные переменные) и т.д.
В соответствии с разным физическим смыслом переменных кажется
естественным, что их определение на границах S элементарного объема V
также должно быть различным.
129
В методе потоков плотности распределения аддитивных характеристик
среды вычисляются с учетом направления вектора скорости, что приводит к
использованию несимметричных аппроксимационных формул. Направление
вектора скорости учитывается в том смысле, что плотность распределения
любой аддитивной характеристики среды в некоторой точке определяется
плотностями распределения в точках, лежащих от рассматриваемой точки
против течения. Наличие конвективного переноса делает пространственные
направления
неравнозначными,
что
естественно
учитывать
при
конструировании разностных схем.
Переменные же газодинамического поля и их производные (в тензоре
вязких напряжений и законе теплопроводности) определяются по
симметричным формулам. На аппроксимацию переменных газодинамического
поля накладывают ограничения и другие законы механики.
Таким образом, если при разностном представлении уравнений (7.11.3)
задаются законы механики (исходя из которых и получаются уравнения Навье Стокса), то естественно ожидать, что между областями зависимости
разностных и дифференциальных уравнений будет соблюдаться правильное
соответствие. В представлении (7.11.4) обычно используется равномерная
пространственная сетка.
Переход к интегральным законам сохранения (7.11.3) требует, по
существу, аппроксимации производных на единицу меньшего порядка по
сравнению с прямыми методами численного решения уравнений Навье –
Стокса.
Нетрудно заметить, что по своей сущности метод потоков обладает
свойством консервативности по массе, импульсу и полной энергии на каждом
временном слое [6], причем консервативность здесь имеет место как локально
(для каждой ячейки разностной сетки), так и интегрально, т.е. для всей
расчетной области. Как следует из (7.11.3), свойство консервативности
обеспечивается тем, что данный подход основан на разностной аппроксимации
законов сохранения, выписанных для каждой ячейки расчетной сетки в
терминах поверхностных интегралов от векторов плотностей потоков q F , т.е.
закон сохранения используется в форме, справедливой для произвольного
объема газа.
Действительно, при решении конкретной задачи поверхностные
интегралы в (7.11.4) вычисляются на отдельных участках поверхностей S ,
являющихся границами между двумя соседними объемами V . В зависимости
от направления векторов потоков значения F {m, Pl , E} изменяются (в одних
ячейках увеличиваются, а в других уменьшаются) на величины, определяемые
потоками массы, импульса и полной энергии через совпадающие участки
границы. Такой способ вычислений не может привести с точностью до ошибок
130
округления к потере или образованию количеств F из-за вычислительных
процедур, что и свидетельствует о консервативности. Здесь проводится перенос
(а, следовательно, и аппроксимация) «комплексов» функций – плотностей
распределения количеств массы, импульса и энергии, что отвечает физике
явления. В основу указанного подхода заложена общность факторов переноса
(откуда и название – метод потоков). Анализ схемы с точки зрения выполнения
законов сохранения представляется важным, так как известно, что расчетная
схема дает наиболее точные результаты, когда она строго сохраняет те
величины, которые сохраняются в рассматриваемом физическом процессе.
7.11.3. КОНЕЧНО – РАЗНОСТНЫЕ СХЕМЫ МЕТОДА ПОТОКОВ
Рассмотрим принципы построения конечно – разностных схем метода
потоков. Будем искать решение задачи внешнего обтекания двумерного
прямоугольного выступа эйлеровым газом.
7.11.3.1. Постановка и решение задачи
Пусть необходимо найти распределение газодинамических параметров
газа при обтекании бесконечного прямоугольного выступа потоком
набегающего газа (см. рис. 7.27). В связи с тем, что выступ является
бесконечным по одной из осей, нет необходимости решать трехмерную задачу.
Достаточно выделить отрезок выступа единичной длины и решать для него
двумерную задачу. Силой тяжести можно пренебречь. Решение такой задачи
будем искать в области между обтекаемым выступом и границей Г , достаточно
удаленной от самого выступа для уменьшения погрешности, вызванной
ограниченностью расчетной области .
Согласно п. 7.11.2 разобьем расчетную область на прямоугольные ячейки
с линейными размерами x и y . Взяв по оси абсцисс N , а по оси ординат M
ячеек, получим, что линейные размеры расчетной области равны
L x N x, L y M y . Стороны ячейки образованы линиями
xi i x, y j j y , i 0, 1, , N , j 0, 1, , M .
(7.11.5)
В качестве характерных внутренних точек объемов, к которым будем относить
переменные поля, выберем на плоскости Λ точки с координатами
xi x 2 i x, y j y 2 j y , i 0, 1, , N 1,
j 0, 1, , M 1 . (7.11.6)
131
Рис. 7.27. Расчетная область поля течения
Λ - расчетная область; Г - граница расчетной области; υ - скорость набегающего
потока; Vi , j - расчетная ячейка с индексами i и j ; S i 1 2, j - граница между ячейками
Vi , j и Vi 1, j ; L x , L y - линейные размеры расчетной области; Lmx , Lmy - линейные
размеры обтекаемого тела; Lвыст - расстояние от левой границы расчетной области до
левого края выступа.
Через Vi , j будем обозначать объем, содержащий точку ( xi , y j ) .
Вычисление
потоков
соответствующих
величин
в
(7.11.4)
осуществляется через четыре участка внешней поверхности Vi , j , которые
обозначим соответственно через S i 1 2, j , S i 1 2, j , S i , j 1 2 , S i , j 1 2 , так что S i 1 2, j
разделяет ячейки Vi , j и Vi 1, j и т. д. с использованием квадратурной формулы
прямоугольников с центральной узловой точкой. Координаты узла на границе
S i 1 2, j , например, равны
xi 1 2 (i 1) x, y j y 2 j y .
(7.11.7)
Такая квадратурная формула требует определения в узловых точках
переменных поля и первых производных от составляющих вектора скорости и
удельной внутренней энергии. Эти величины в дальнейшем будем обозначать с
помощью полуцелых индексов, например: (υ x ) i 1 2, j на S i 1 2, j .
В предлагаемом варианте метода потоков в основу вычислительного
алгоритма положены нестационарные уравнения (7.11..3). Если в момент
времени t k k известны значения m k m(t k ), Pl k , E k , где - шаг
интегрирования по времени, то в момент t k (k 1) эти величины с
погрешностью O( 2 ) могут быть вычислены следующим образом:
m k 1 m k q m n ds ,
k
S
Pl k 1 Pl k qlp n ds , (7.11.8)
k
E k 1 E k q
S
n ds .
k
S
132
7.11.3.2. Обтекание прямоугольного выступа эйлеровым газом
Будем искать решение задачи обтекания выступа эйлеровым газом при
условии постоянства температуры в системе. Это позволит не вычислять поток
внутренней энергии через границы ячейки, т.к. внутренняя энергия в таком
случае постоянна. Таким образом, на каждом шаге расчета для каждой стороны
ячейки необходимо вычислять плотность потока массы q m и две компоненты
плотности потока импульса qlsp (l , s x, y ) . Запишем выражения для плотности
потока массы и импульса для эйлерова газа:
qlm ρ l ,
qlsp l s P ls
P
ll
.
.
3
(7.11.9)
(7.11.10)
Здесь Р – гидростатическое давление; ls – символ Кронекера. Следует
заметить, что в литературе встречаются выражения (7.11.9), в которых перед
давлением стоит знак (+). Такое различие связано с тем, что можно по разному
понимать давление: как силу, действующую на сжатие (-), или как силу,
действующую на растяжение (+) элементарного объема при выводе выражения
для плотности потока импульса.
Необходимо записать конечно–разностные выражения для (7.11.9) и
(7.11.10). Для примера запишем эти выражения для площадки S i 1 2, j . Они
имеют тот же вид, что и (7.11.9) и (7.11.10), только параметры поля заменяются
на вычисленные значения на границе между ячейками:
q
m i 1 2, j
x
q
p i 1 2, j
xx
q
ρ i 1 2, j x
i 1 2, j
i1 2, j x
p i 1 2, j
xy
,
x
i 1 2, j
i 1 2, j
i1 2, j x
i 1 2, j
(7.11.11)
Pi1 2, j ,
y
i 1 2, j
.
(7.11.12)
(7.11.13)
Индексы i 1 2 , j означают, что соответствующие параметры вычисляются на
границе S i 1 2, j между Vi , j и Vi 1, j . Теперь распишем формулы для
вычисления каждого параметра из (7.11.11-13). Согласно соображениям,
приведенным в п. 7.11.3.2, массовую плотность необходимо аппроксимировать
по несимметричной формуле, учитывающей направление потока:
1,5
i 1 2, j
i, j
133
0,5 i 1, j , при x 0
(7.11.14)
i 1, j
0,5 i 2, j , при x 0
1,5
Скорости на границе ячейки вычисляются по симметричным формулам:
x
i 1 2, j
x i 1, j x i , j
2
,
y
i 1, j
i 1 2, j
y
y
i, j
2
.
(7.11.15)
Давление P можно получить из уравнения состояния идеального газа,
записанного для конечно – разностных аналогов параметров газа:
P i1 2, j i1 2, j RT
,
(7.11.16)
где R - универсальная газовая постоянная; T - температура системы; молярная масса газа.
Следует заметить, что существует определенная неоднозначность
выбора аппроксимаций для термодинамических параметров. Причем некоторые
из этих аппроксимаций являются аналогичными с точки зрения точности.
Предпочтительность каких-то конкретных вариантов необходимо определять
опытным путем. Например, численные эксперименты показали, что с точки
зрения устойчивости расчета в (7.11.16) для определения давления лучше
использовать среднее арифметическое плотностей граничащих ячеек, а не
плотность, вычисленную по формуле (7.11.14). Формулы (7.11.11-16) имеют
второй порядок точности.
Аналогичным способом записываются выражения для оставшихся трех
границ ячейки.
Необходимо остановиться на процедуре задания граничных условий.
Граничные условия можно разделить на два типа:
1. граничные условия на внешней границе;
2. граничные условия на твердом теле.
Необходимость задания первого типа условий вызвана тем, что
расчетная область ограничена. На внешней границе Г расчетной области
должны быть заданы условия, не оказывающие существенного влияния на
решение вблизи обтекаемого тела. Внешние границы расчетной области
должны располагаться достаточно далеко от обтекаемого тела. Потому что
граничные условия оказывают влияние на решение вблизи границы. Данное
обстоятельство вызвано тем, что условия на внешней границе выбираются,
исходя из параметров набегающего потока. Если же внешняя граница
расположена близко к обтекаемому телу, то возмущения поля течения,
вызванные наличием обтекаемого тела, не успевают затухнуть, и возникает
134
большой перепад параметров у внешней границы, что нарушает картину
течения и вносит дополнительную погрешность. Можно использовать
различные варианты организации этих условий. Например, вводить слой
приграничных ячеек и для обеспечения отсутствия скачкообразного изменения
параметров вычислять их значение как среднее между условиями набегающего
потока и ближайшей ячейкой внутри области, или аппроксимировать с
различной точностью изменения параметров в соседних ячейках внутри
области и экстраполировать их на приграничные ячейки. Как правило, наиболее
удачным является выбор комбинации различных вариантов организации
граничных условий. К примеру, с «наветренной» (см. рис. 7.) стороны выступа
для приграничных ячеек можно использовать усреднение между соседними
ячейками внутри области и условиями набегающего потока. С «подветренной»
стороны можно экстраполировать на приграничные ячейки параметры ячеек,
расположенных внутри расчетной области. Данный способ учитывает
преимущественное направление возмущений потока. С «наветренной» стороны
эти возмущения «сдуваются» струей набегающего потока (поэтому в граничных
условиях для этой стороны и фигурируют условия набегающего потока), а с
«подветренной» стороны возмущенный поток газа движется в сторону правой
границы (поэтому проводится экстраполяция изнутри расчетной области).
Несмотря на все вышесказанное можно использовать вариант для
«наветренной» стороны и для всей области. Просто необходимо будет
отодвинуть правую границу дальше от тела на такое расстояние, где «след»,
оставляемый телом, исчезает, и поток можно считать невозмущенным.
Второй тип условий отражает физическую модель взаимодействия газа
с обтекаемым телом. Эти граничные условия делятся на два вида:
1. условие непротекания,
2. условие прилипания.
Условие непротекания означают, что газ не может попасть в твердое
тело и накапливаться с течением времени на его поверхности, и выражается в
равенстве нулю нормальной к поверхности тела компоненты скорости газа.
Условие прилипания означают, что на границе с твердым телом газ полностью
тормозится и имеет нулевую скорость. В этом случае вектор скорости газа на
границе газ - твердое тело равен нулю. Условие прилипания бессмысленно
формулировать для невязкого (эйлеровского) газа, т.к. в этом случае отсутствует
механизм, который позволил бы другим слоям газа (не прилегающим к
поверхности) «чувствовать» торможение около твердого тела. В методе потоков
для обеспечения условий на границе с твердым телом необходимо задавать
плотности потоков импульса.
135
7.11.3.3. Этапы вычислительного цикла
Расчетная программа содержит следующие этапы:
1. Задаются начальные условия (как правило, в невозмущенный поток
газа мгновенно помещается тело).
2. Аппроксимируются параметры потока в приграничных ячейках (на
свободной границе). Причем, с одной стороны, значения параметров внутри
зоны известны, а, с другой, известны условия набегающего потока.
3. Для каждой ячейки внутри расчетной зоны вычисляются плотности
потоков через каждую площадку. Здесь следует учитывать условия на границе с
телом, это осуществляется за счет задания потоков импульса (и энергии, в
общем случае) через площадку, примыкающую к твердому телу.
4. Для каждой ячейки, зная плотности потоков, умножая их на шаг по
времени и на соответствующую площадь (в двумерном случае длину) и
суммируя по всем границам, вычисляется изменение соответствующих
количеств (массы, компонент импульса и т.д.).
5. По известному изменению количеств за временной шаг,
пересчитывается масса, импульс и, если необходимо, энергия газа в каждой
ячейке.
6. Пункты 2-5 повторяются до тех пор, пока по какому-либо критерию
не будет принято решение, что расчет закончен.
Блок схема алгоритма расчета приведена на рис. 7.28.
При организации граничных условий газ – твердое тело необходимо
модифицировать расчетные формулы (7.11.14). Это связано с тем, что при
расчете плотности в приграничной ячейке в формуле (7.11.14) для этой ячейки
могут использоваться плотности газа в ячейках, которые находятся внутри
твердого тела, а для них плотность газа не определена. Поэтому, например, в
случае ячейки, граничной с твердым телом, которое прилегает к стороне S i 1 2, j
и в случае, если x 0 плотность на S i 1 2, j определяется по формуле:
i 1 2, j
i 1, j i , j
2
.
(7.11.17)
Кроме того, для организации условия непротекания необходимо задавать
нулевые плотности потока импульса через границу газ – твердое тело.
136
Рис. 7.28. Блок-схема алгоритма программы расчета внешнего обтекания
137
7.11.4. РЕЗУЛЬТАТЫ РАСЧЕТА
В двух численных экспериментах использовались геометрические
параметры расчетной зоны, приведенные в таблицt 7.1, а в таблице 7.1 –
параметры газового потока гексафторида урана.
Таблица 7.1
Параметры расчетной области при обтекании прямоугольного выступа
эйлеровым газом
№
эксперимента
1
2
Lx ,
Ly ,
x ,
y ,
Lтx ,
Lтy ,
Lвыст , м
м
3
5
м
1,5
1,5
м
0,03
0,025
м
0,05
0,05
м
0,45
0,375
м
0,75
0,75
0,6
2,5
Таблица 4.2
Параметры газа при обтекании прямоугольного выступа эйлеровым газом
№
эксперимента
1
2
P,
Па
1333
1333
V ,
м/с
1
200 ( M 2)
,
3
кг/м
0,188
0,188
T,
,
К
300
300
кг/моль
0,352
0,352
На рис. 7.29 приведено полученное в численном эксперименте № 1 поле
скоростей, а на рис. 7.30 – поле давления. При обтекании выступа эйлеровым
газом при заданных условиях образуется две зоны циркуляции: сверху над
выступом и справа от выступа. На рис. 7.30 можно видеть, что в тех местах, где
возникают зоны циркуляции потока (рис. 7.29), давление заметно уменьшается.
И напротив, слева от выступа, где поток набегающего газа «упирается» в
стенку, давление возрастает.
В увеличенном масштабе эти зоны вихревого движения изображены над
выступом на рис. 7.31, а за выступом на рис.7.32. Как видно на рис. 7.31, в
отсутствии сил вязкости вблизи твердой стенки над выступом поток
гексафторида урана циркулирует в двух вихрях: по набегающему потоку в
передней части по часовой стрелке и против направления набегающего потока
в задней части против часовой стрелки, в которую наблюдается заброс среды из
глобального вихря за выступом, как видно на рис. 7.31 и 7.32.
138
Рис. 7.29. Распределение скоростей индивидуальных частиц
в расчетной области (эксперимент № 1)
P = 1333 Па
P = 1330 Па
P = 1335 Па
Рис. 7. 30. Распределение давления в расчетной области
(эксперимент № 1)
139
Рис. 7.31. Поле скоростей над верхней поверхностью выступа
(эксперимент № 1)
Рис. 7.32. Глобальный вихрь за выступом
140
При обтекании прямоугольного выступа сверхзвуковым потоком газа
(эксперимент №2 в табл. 7.1, 7.2) образуется ударная волна перед выступом
(рис 7.33 и 7.34). На рисунках видно, что перед пластинкой образуется ударная
волна, давление в которой почти в 5 раз превышает давление в набегающем
потоке, а за пластинкой образуется обширная разреженная зона, давление в
которой в 1.5 раза меньше давления в набегающем потоке.
Рис. 7.33. Поле скоростей перед выступом (эксперимент № 2)
P=1333 Па
P = 800 Па
P = 6000 Па
Рис. 7.34. Ударная волна в сверхзвуковом потоке идеального газа
при обтекании выступа (эксперимент № 2)
141
Таким образом, при обтекании выступа сверхзвуковым потоком
идеального газа перед ним возникает ударная волна – скачок уплотнения
плотности. Во фронтальной и кормовой областях поля течения возникает
разность давлений, которая тем больше, чем выше скорость набегающего
потока. Эта разность давлений является источником возрастания энтропии в
сверхзвуковом потоке идеального газа.
ЛИТЕРАТУРА:
1. Белоцерковский О.М. Численное моделирование в механике
сплошных сред.- М.: Наука, 1984.
2. Марчук Г.И. Методы вычислительной математики.- М.: Наука, 1977.
3. Самарский А.А. Теория разностных схем.- М.: Наука, 1977.
4. Бёрд Дж. Молекулярная газовая динамика.- М.: Мир, 1965.
5. Пирумов У.Г., Росляков Г.С. Численные методы газовой динамики.М.: Высш. Шк., 1987.
6. Бабаков А.В. Численное моделирование некоторых задач
аэрогидродинамики.-М.: ВЦ АН СССР, 1986, с. 56.
115
8. ВЯЗКАЯ ЖИДКОСТЬ
В этом разделе изучим основные закономерности движения вязкой
жидкости. Ограничимся рассмотрением лишь ньютоновских жидкостей, для
которых модуль сдвига равен нулю, т.е. 0 .
8.1. УРАВНЕНИЕ НАВЬЕ-СТОКСА
В разделе 1 (п.6.4.) было получено уравнение сохранения количества
движения (импульса единицы массы) - уравнение движения в
фундаментальной системе уравнений сохранения (6.9.1). Это уравнение
содержит производную по координатам тензора упругих напряжений ik . В
случае, если в среде имеют место и неупругие напряжения, описываемые
тензором неупругих (вязких) напряжений ~ik , то в уравнении движения (6.9.1)
вместо тензора ik должен быть подставлен полный тензор напряжений
ik ik ~ik , определяемый согласно (6.11.1). Тогда уравнение движения
(6.9.1) принимает форму:
i
1 ik
k i fi
.
t
xk
xk
(8.1.1)
Для ньютоновских жидкостей ( 0 ), испытывающих только всестороннее
сжатие или растяжение, полный тензор напряжений ik в изотермических
условиях согласно (5.2.5а) и (6.10.4) равен:
i k 2 l
ik l ik . (8.1.2)
xl
xk xi 3 xl
ik P ik ~ik P ik
После вычисления производной ik xk , подстановки её в (8.1.1) и
приведения подобных, уравнение движения для i - ой компоненты скорости
индивидуальной частицы принимает вид:
i
i
1 P 2i 1
1 l
k
fi .
t
xk
xi xk2
3 xi xl
(8.1.3)
Если вместо коэффициента динамической вязкости ввести коэффициент
кинематической вязкости , то уравнение движения можно записать в
векторной форме:
υ
1
1
1
υ υ P υ graddiv υ f .
t
3
(8.1.4)
116
Уравнения (8.1.3) и (8.1.4) называются уравнениями Навье-Стокса для вязкой
жидкости. Для несжимаемой жидкости div υ 0 и уравнение Навье-Стокса
записывается в виде:
υ
1
υ υ P υ f .
(8.1.5)
t
Из уравнений (8.1.3) и (8.1.4) видно, что уравнение Навье-Стокса отличается от
уравнения Эйлера (7.1.2) дополнительными слагаемыми в правой части,
учитывающими вязкость жидкости.
Замкнутая система уравнений сохранения массы, импульса и внутренней
энергии вязкой жидкости включает также уравнение непрерывности движения
(6.3.5) и уравнение сохранения внутренней энергии (6.7.10) с заменой в нем ik
на ik , т.е.
d
divυ 0, вн divq ik i .
(8.1.6)
t
dt
xk
Уравнения (8.1.5), (8.1.6) вместе с термическим и калорическим
уравнениями состояния и законом Фурье ( qi T x i ) образуют замкнутую
систему уравнений движения вязкой жидкости. Предполагается, что решение
этой системы существует и при заданных начальных и граничных условиях оно
единственно.
8.1.1. Граничные и начальные условия
Прямыми и косвенными экспериментами показано, что вязкая жидкость
“прилипает” к поверхности обтекаемого тела. Силы взаимодействия между
поверхностными атомами обтекаемого тела и “прилипающими” к ним
молекулами жидкости оказываются достаточными, чтобы последние двигались
вместе с поверхностью обтекаемого тела. Поэтому на поверхности тела,
обтекаемого вязкой жидкостью, в каждой точке поверхности должны быть
равны нулю не только нормальные компоненты скорости жидкости и тела, но
также и касательные компоненты. Следовательно, на поверхности обтекаемого
тела в каждой точке в общем случае, когда поверхность перемещается со
скоростью u, должно выполняться векторное равенство:
(8.1.7)
υ u.
Сила, действующая на единицу поверхности тела в направлении i - ой
координатной оси, определяется компонентами полного тензора напряжений,
т.е.
i n ik n k ,
где n k есть проекция на ось к внешнего по отношению к телу нормального
единичного вектора,
Рассмотрим движение двух несмешивающихся жидкостей. Очевидно, на
поверхности раздела этих жидкостей скорости их в каждой точке поверхности
раздела должны быть равны, т.е. υ1 υ 2 .
117
Для любого элемента поверхности раздела двух несмешивающихся
жидкостей силы, с которыми жидкости действуют друг на друга, равны по
величине и обратные по направлению согласно третьему закону Ньютона.
Пусть сила, действующая на жидкость 1 со стороны жидкости 2 на единицу
1 n 1
1
площади в i - ом направлении, равна i1 ik
k , где nk есть проекция
внешнего по отношению к жидкости 1 нормального единичного вектора на ось
к. Аналогично сила, действующая на жидкость 2 со стороны жидкости 1, равна
i 2 ik 2 nik 2 . Очевидно, что n k1 n k 2 . Тогда третий закон Ньютона можно
записать в виде:
σ i1 σ i2 ,
ik1nk1 ik2 nk2 ,
ik1 ik2 .
На свободной поверхности жидкости, граничащей с вакуумом, должно
выполняться условие
ik nk 0, Pδik σ~ik nk 0 .
Условие (8.1.7) не имеет места при обтекании тел разреженным газом,
когда средняя длина свободного пробега молекул газа сравнима с размерами
обтекаемого тела. В этом случае вблизи поверхности можно выделить слой
толщиной, равной средней длине свободного пробега газовых частиц, в
котором частицы не сталкиваются. Внутри этого слоя можно выделить две
группы частиц. Одна из них с отрицательной нормальной составляющей
скорости каждой частицы имеет некоторую среднюю переносную скорость u0
вдоль поверхности. Другая часть частиц, отражённых от границы по закону
диффузного (равновероятного) рассеяния - закону косинуса имеет нулевую
скорость переноса вдоль поверхности. Усреднённая по обеим группам частиц
скорость равна u0/2. Поэтому тангенциальная скорость газа испытывает скачок
вблизи поверхности тела, т. е. газ как бы “скользит” вдоль поверхности. При
этом на поверхности тела испытывает скачок и температура. Однако
рассмотрение этих явлений не входит в компетенцию механики сплошных
сред, а является предметом изучения кинетической теории газов.
В граничные условия входит также задание давления и температуры (или
потока тепла) на некоторых поверхностях в жидкости.
Начальные условия необходимы лишь при решении нестационарных
задач и заключаются в задании в некоторый начальный момент времени
пространственных распределений скоростей, давлений и температур.
8.1.2. Вихревое движение вязкой жидкости
Рассмотрим уравнение движения несжимаемой вязкой жидкости. Пусть
массовые силы являются потенциальными, т. е. f пот . Воспользуемся
известной формулой векторного анализа для замены υ υ в (7.1.1), тогда
(8.1.5) можно переписать в виде:
118
υ υ 1 2 υrotυ,
2
P 2
υ
υrotυ
пот υ .
t
2
Применяя операцию ротора к обеим частям уравнения и принимая во
внимание, что rot 0 , rotυ 2ω , получим:
ω
rotω υ ω .
(8.1.8)
t
Это уравнение движения для вихря ω 1/ 2 rotυ . Если 0 , то из (8.1.8)
следует уравнение Громека для баротропного движения идеальной жидкости.
В качестве примера рассмотрим плоский вихрь с компонентами вектора
угловой скорости, равными x y 0, z z r , t . Частицы жидкости
двигаются по окружностям с центром на оси вихря с линейной скоростью
r, t . В п.7.4.3 было показано, что для плоского вихря в жидкости
rotυ 0 . Поэтому второе слагаемое в левой части уравнения (8.1.8) обращается
в нуль, и уравнение (8.1.8) имеет место только для z - компоненты вектора ω :
ωz
νωz .
t
(8.1.9)
В цилиндрической системе координат уравнение (8.1.9) можно записать в
виде:
z
1 z
2 z 1 z
2
r
.
r
t
r r
r r r
(8.1.10)
Уравнение (8.1.10) имеет вид уравнения диффузии и как всякое уравнение
параболического типа описывает некоторый необратимый процесс (первая
производная по времени).
Пусть в начальный момент времени вихревое движение было
стационарным и поддерживалось некоторым постоянным источником
(например, вращением тонкого металлического цилиндра). При этом движение
в любой точке, кроме оси вихря, как показано в предыдущем разделе (п. 7.4.3),
является потенциальным, т.е. rotυ 0 . Траектории частиц представляют собой
окружности с центром на оси вихря. Линейные скорости частиц находятся из
определения циркуляции:
Г
υφ 0 .
2 πr
Если в начальный момент времени интенсивность (циркуляция скорости)
вихревого движения определяется величиной Г 0 , то в последующие моменты
времени решение уравнения (8.1.10) даёт временную зависимость в виде:
119
r2
Г
ωz r , t 0 e 4vt .
4πνt
(8.1.11)
Правильность решения можно проверить подстановкой (8.1.11) в уравнение
(8.1.10).
Из (8.1.11) видно, что интенсивность вихревого движения в центре вихря
r 0, t 0 убывает обратно пропорционально времени. В некоторой
фиксированной точке пространства r а 0 z - компонента ротора скорости,
а следовательно, и интенсивность увеличиваются с течением времени,
достигают максимума при t а 2 4 , а затем уменьшаются до нуля. При t
интенсивность вихревого движения в любой точке жидкости стремиться к
нулю. Таким образом, в отличие от вихревого движения в идеальной жидкости,
которое сохраняется с течением времени, вихревое движение в вязкой
жидкости с течением времени захватывает все большие области пространства,
занятого жидкостью (диффундирует), и затухает с течением времени
вследствие диссипации (рассеяния в пространстве) энергии механического
движения из-за вязкости жидкости. В конечном счёте эта энергия
механического движения переходит в тепло. После выключения источника
вихревого движения в любой точке вязкой жидкости rotυ 0 , т.к. z 0 , т. е.
движение непотенциально во все последующие моменты движения.
8.2. ДИССИПАЦИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ В
НЕСЖИМАЕМОЙ ВЯЗКОЙ ЖИДКОСТИ
Определим изменение во времени кинетической энергии движения
несжимаемой вязкой жидкости за счет ее диссипации в пространстве.
Рассмотрим некоторый неподвижный в пространстве объем V , заполненный
движущейся жидкостью. Кинетическая энергия жидкости в этом объеме равна
Eкин
2
V 2
dV .
Найдем изменение кинетической энергии жидкости в этом объеме в
единицу времени:
∂Eкин ∂ ρυ 2
∂ ρυ 2
dV .
(8.2.1)
dV
∂t
∂t V 2
V ∂t 2
Произведем необходимые преобразования под знаком интеграла:
∂υ
∂ ρυ 2 υ 2 ∂ρ ρ ∂υ 2
ρυi i .
∂t 2 2ρ ∂t 2 ∂t
∂t
(8.2.2)
Здесь первое слагаемое равно нулю, так как жидкость предполагается
несжимаемой, т. е. const .
120
Воспользуемся далее уравнением движения Навье-Стокса для замены
i t в (8.2.2) и, пренебрегая действием массовых сил f i 0 , получим:
∂υi
∂σ~ik
∂ ρυ 2
∂P
.
ρυi υk
υi
υi
∂t 2
∂xk
∂xi
∂xk
(8.2.3)
Нетрудно видеть, что слагаемые в правой части (8.2.3), используя
условие несжимаемости жидкости divυ 0 , можно записать в виде:
∂υi
∂
υ 2 υ 2 ∂ρυk
∂
υ2
ρυk
ρυk
,
ρυi υk
∂xk ∂xk
2 2 ∂xk
∂xk
2
∂P
∂
P P ∂ρυ k
∂
P
υi
(8.2.4)
ρυ k
ρυ k ,
∂ xi ∂ x k
2 2 ∂x k
∂x k
2
∂σ~
∂
υi σ~ik σ~ik ∂υi .
υi ik
∂x k
∂x k
∂x k
После подстановки (8.2.4) в (8.2.3) и (8.2.1) имеем:
υ2 P
∂Eкин
∂
~
~ ∂υi dV .
ρυ
k υi σ ik dV σ ik
∂t
∂xk
V ∂xk
V
2 ρ
(8.2.5)
Первый интеграл в правой части (8.2.5) может быть преобразован в
соответствии с теоремой Гаусса-Остроградского в интеграл по поверхности S ,
ограничивающей рассматриваемый объём. Нетрудно видеть, что выражение в
квадратных скобках уравнения (8.2.5) представляет собой k ю компоненту
вектора плотности потока энергии (вектор Умова-Пойтинга) в отсутствие
потока тепла и потенциальной энергии ( пот 0 ). Полагая, что на бесконечно
удаленной поверхности жидкость покоиться υ 0 , очевидно, что первый
интеграл в правой части (8.2.5) равен нулю. Тогда второй интеграл в (8.2.5)
определяет изменение кинетической энергии жидкости в единицу времени в
рассматриваемом объёме:
∂Eкин
∂υ
σ~ik i dV .
(8.2.6)
∂t
∂x k
V
Для несжимаемой жидкости divυ 0 тензор вязких напряжений имеет
вид:
∂υ ∂υ
σ~ik η i k .
∂xk ∂xi
Поэтому выражение (8.2.6) можно записать с виде:
2
∂Eкин
η ∂υ ∂υ
i k dV .
∂t
2 V ∂xk ∂xi
(8.2.7)
121
Так как кинетическая энергия вязкой жидкости вследствие необратимой
диссипации из-за вязкости может только уменьшаться с течением времени, то
из (8.2.7) следует, что коэффициент вязкости всегда положителен.
121
8.3. ТОЧНЫЕ РЕШЕНИЯ УРАВНЕНИЯ НАВЬЕ-СТОКСА
8.3.1. Основные затруднения при решении уравнения Навье-Стокса
Уравнение Навье-Стокса (8.1.5) по сравнению с уравнением Эйлера
содержит наряду с первыми и вторые производные скорости по координатам.
Основная трудность решения уравнения движения вязкой жидкости
заключается в нелинейности уравнений, обусловленной слагаемым υ υ , а не
в дополнительных слагаемых, учитывающих вязкие силы. В теории движения
идеальной жидкости эту трудность обходили, полагая движение
потенциальным, т. е. предполагали rotυ 0 . Если для идеальной жидкости
предположение о потенциальности движения не противоречило механической
модели жидкости, то движение вязкой жидкости в общем случае не является
потенциальным. Можно назвать лишь несколько частных случаев, когда
движение вязкой жидкости потенциально. Так, например, в предыдущем
разделе было показано (п. 7.4.3), что движение в любой точке, кроме оси
плоского вихря постоянной интенсивности, является потенциальным вне
зависимости от модели жидкости. Поэтому существует очень мало точных
решений уравнения Навье-Стокса. Эти точные решения могут быть получены в
том случае, когда удается тем или иным способом избавиться от нелинейного
слагаемого υ υ .
В чисто математическом смысле краевые задачи теоретической
гидродинамики чрезвычайно трудны. Поэтому становление теории шло бы
гораздо медленнее, если бы строгая математика не дополнялась различными
правдоподобными интуитивными гипотезами. Известный немецкий математик
Биркгоф, анализируя в начале прошлого века положение в теоретической
гидродинамике, назвал семь таких гипотез. Рассмотрим только две, которые
понадобятся в дальнейшем:
1. При определении физических переменных в задачах можно полагаться
на интуицию, которая может быть подкреплена оценкой слагаемых в
рассматриваемых уравнениях.
2. Топологию течения, т.е. общее представление о поле течения
жидкости, можно определить интуитивно, полагая, в частности, что
симметричное воздействие вызывает симметричный эффект.
Конечно, с точки зрения чистой математики такие гипотезы не имеют
права на существование в строгой теории. Но, как видно будет далее, они
позволяют либо получить решение, либо значительно упрощают решение и
приводят к результатам, хорошо согласующимися с опытными данными, что и
является конечной целью всякого исследования.
Таким образом, решения, полученные на основании таких гипотез,
необходимо
проверять экспериментально.
В случае адекватности
предполагаемого на основании гипотез движения действительному,
наблюдаемому в опыте, полученные решения можно считать точными.
122
8.3.2. Течение Куэтта
Рассмотрим вязкую несжимаемую жидкость, расположенную между
двумя параллельными бесконечными плоскостями, находящимися на
расстоянии h друг от друга. Пусть
y
в некоторый момент времени
верхняя плоскость (рис. 8.1)
u
начинает двигаться и движется в
h
дальнейшем
с
постоянной
скоростью
параллельной
u,
нижней
плоскости.
Через
x
0
некоторое время из-за прилипания
жидкости к поверхностям между
плоскостями
установиться
Рис.8.1
некоторое стационарное движение
вязкой жидкости с некоторым распределением скорости вдоль оси у.
Определим это установившееся распределение скорости.
Так как плоскости в направлении оси z неограниченны, то можно
рассматривать движение как плоское. Если ускорение силы тяжести
направлено по оси y, а расстояние между плоскостями h невелико, то можно
пренебречь влиянием силы тяжести на движение жидкости в зазоре. Здесь
использована гипотеза 1. Далее интуитивно полагаем, что скорость частиц
жидкости в любой точке зазора направлена только вдоль оси x и зависит только
от координаты y в силу бесконечности пластин в направлении x. Здесь
использована вторая гипотеза об интуитивном определении топологии течения,
основанная на предположении о симметрии эффекта при симметричном
воздействии. Так как воздействие (движущаяся верхняя плоскость)
симметрично относительно оси y, то и эффект (движение частиц жидкости)
также будет симметричным относительно оси y, т. е. скорости частиц будут
направлены только вдоль оси x. Движение жидкости будем полагать
изотермическим. Таким образом, в этом случае нет необходимости
рассматривать уравнение сохранения внутренней энергии. Необходимо решить
уравнения при следующих условиях:
∂υ
0, f 0, υ x υ x y , υ y υ z 0,
(8.3.1)
∂t
const, T const, вн const.
Запишем уравнение движения (8.1.5) для компонент скорости движения в
декартовой системе координат и уравнение непрерывности (8.1.5) в форме:
∂υx
∂υx
∂υx
1 ∂P η ∂ 2 υx ∂ 2 υx ∂ 2 υx
υx
υy
υz
2 ,
∂x
∂y
∂z
ρ ∂x ρ ∂x 2
∂y 2
∂z
∂v y
∂υ y
∂υ y
2
2
2
1 ∂P η ∂ υ y ∂ υ y ∂ υ y
υx
υy
υz
, (8.3.2)
∂x
∂y
∂z
ρ ∂x ρ ∂x 2
∂y 2
∂z 2
123
∂υz
∂υz
∂υz
1 ∂P η ∂ 2 υz ∂ 2 υz ∂ 2 υz
υx
υy
υz
2 2 ,
∂x
∂y
∂z
ρ ∂x ρ ∂x 2
∂y
∂z
∂υ x ∂υ y ∂υ z
0.
∂x
∂y
∂z
Из системы уравнений (8.3.2) видно, что при заданной топологии движения
нелинейное слагаемое υ υ из уравнений исчезает. Так будет всегда, когда
линии тока рассматриваемого движения параллельны.
Используя условия (8.3.1), полученные интуитивно, из уравнений (8.3.2)
получим следующие уравнения:
∂ 2 υx
∂P
η 2 ,
∂x
∂y
∂P
0,
∂y
∂P
0, 0 0.
∂z
(8.3.3)
Из (8.3.3) видно, что при заданной топологии движения жидкости
уравнение непрерывности удовлетворяется тождественно. Из 2-го и 3-го
уравнений системы (8.3.3) заключаем, что давление не зависит ни от y , ни от
z , а может быть функцией только x .
Обратимся к первому уравнению системы (8.3.3). Так как справа в
уравнении стоит функция только y , а слева - функция только x , то равенство
возможно только тогда, когда правая и левая части равны некоторой
постоянной величине, не зависящей от координат. Тогда имеем:
dP
const, P const x P0 .
dx
(8.3.4)
Здесь снова приходится обращаться к правдоподобной гипотезе о симметрии
эффекта. Из (8.3.4) следует, что на бесконечности (при x ) давление
является неограниченным. Но это трудно понять физически, т. к. движение
жидкости в любой точке начиналось из одного и того же состояния, не
зависящего от координаты x . Поэтому постоянную в уравнении (8.3.4) можно
считать равной нулю. В соотношении (8.3.4) P0 есть некоторое постоянное
давление, которое можно обозначить как P .
Тогда для нахождения распределения скорости в зазоре имеем
уравнение:
∂ 2 υx
∂υ x
0
,
a, υ x ay b .
(8.3.5)
∂y 2
∂y
Граничные условия к уравнению (8.3.5) имеют вид:
y 0, x 0, y h, x u .
Используя граничные условия, имеем:
υx ( y) u
y
.
h
(8.3.6)
124
y
u
xy
n
n
0
xy
x
Рис. 8.2
.
Как видно, скорость не
зависит от коэффициента вязкости.
На рис.8.2. изображена эпюра
скоростей частиц жидкости в зазоре
согласно уравнению (8.3.6).
Найдем силы, действующие на
единичную
площадку
на
поверхностей. Рассмотрим силу
действующую в направлении оси x
на единицу площади нижней
поверхности.
Переобозначим для краткости
записи тензор напряжений
ik
Pik ~ik ik .
Согласно определению (п. 5.3.1) сила, действующая на единичную площадку в
направлении оси i , равна:
in ik nk , xn xx n x xy n y xz n z .
Для нижней поверхности нормальный единичный вектор имеет компоненты
n n(0, 1, 0) . Следовательно, для силы xn получим следующее выражение:
σ n σ n Pδ σ~ σ~
x
xy
y
xy
xy
xy
∂υ y
∂υ
∂υ
η x
η x
∂x y 0
∂y
∂y
η
y 0
u
.
h
(8.3.7)
Заметим, что здесь использовано условие несжимаемости жидкости
k xk 0 . Сила, действующая на верхнюю поверхность в направлении оси x
с n n(0, - 1, 0) , равна:
xn xx n x xy n y xz n z .
Поэтому имеем:
∂υ
σ xn σ xy σ~ xy η x
∂y
η
y h
u
.
h
Как и следовало ожидать, силы оказались равными, но противоположно
направленными.
Сила, действующая на единицу площади нижней поверхности
в направлении оси y , равна
yn yx n x yy n y yz n z , n x 0, n y 1, n z 0,
125
∂υ y ∂υ y
P .
(8.3.8)
σ yn σ yy P η
∂y y 0
∂y
Легко убедиться, что на единицу поверхности верхней плоскости в
направлении оси y действует сила,
y
равная P .
u
Выделим в зазоре некоторую
n
P
индивидуальную
частицу,
x
3
2
имеющую
форму
квадрата
y n
(рис.8.3), и определим силы,
P
P
действующие на стороны этого
квадрата, вызываемые окружающей
y n
жидкостью. Силы, действующие на
1
4
стороны, перпендикулярные оси y ,
P
уже определены выше, и так как
x(n)
они не зависят от y , то будут
x
одинаковы во всех сечениях,
перпендикулярных оси y . Силы,
действующие на сторону 1-2 с
n n(1, 0. 0) в направлении оси y
Рис. 8.3
и x, равны соответственно:
yn yk nk yx n x yy n y yz n z , xn xx n x xy n y xz n z ,
Поэтому имеем:
∂υ y ∂υx
u
η , σ xn σ xx nx P.
σ yn σ yx η
∂y
h
∂x
(8.3.9)
Аналогично можно показать, что силы, действующие на сторону 3-4
индивидуальной частицы (см. рис. 8.3) , вследствие обратного направления
нормали соответственно равны и противоположны по знаку найденным выше.
На рис.8.3 видно, что выбранная частица подвергается сжатию силами
давления P и перекосу тангенциальными силами xn и yn . Выше специально
подробно рассмотрено нахождение всех сил, действующих на частицу, т. к. в
данном случае лучше воспользоваться
формальными определениями, чем
полагаться на интуицию.
Полученное точное решение задачи Куэтта может быть использовано для
экспериментального определения феноменологического коэффициента
динамической вязкости . Для этого нужно измерить силу, действующую на
единицу площади верхней или нижней поверхности. Тогда, измеряя расстояние
между плоскостями и воспользовавшись формулой (8.3.7), можно определить
коэффициент вязкости. Однако с точки зрения экспериментальной техники это
126
не самый простой способ измерения коэффициента динамической вязкости
жидкости.
8.3.2. Плоское течение Пуазейля
Рассмотрим бесконечные параллельные неподвижные плоскости,
расстояние между которыми равно h. Пусть между плоскостями изотермически
движется вязкая несжимаемая жидкость под действием постоянного градиента
давления, направленного вдоль оси x (рис.8.4).
Снова будем предполагать,
что если ускорение силы тяжести
y
направлено вдоль оси y, то сила
тяжести не должна влиять на
+ h/2
x x y
движение жидкости в зазоре между
плоскостями из-за малости зазора..
Пусть градиент давления
0
создан
некоторым
внешним
x
источником (насос, компрессор).
Будем полагать, что движение
плоское,
стационарное.
Снова
- h/2
используя гипотезу 2, будем
полагать, что скорость частиц
Рис. 8.4
жидкости в зазоре направлена
только вдоль оси x и зависит только от y. Таким образом, необходимо решить
уравнение Навье-Стокса при тех же условиях (8.3.1), что и в задаче Куэтта.
Рассматривая систему уравнений
(8.3.2) при сделанных предложениях,
получим такие же уравнения:
∂ 2 υx
∂P
∂P
∂P
η 2 ,
0,
0, 0 0 .
(8.3.10)
∂x
∂y
∂y
∂z
Уравнение неразрывности удовлетворяется тождественно.
Из второго и третьего уравнений следует, что давление не зависит ни от
y, ни от z, а может быть функцией только x.
∂ 2 υx
∂P
η 2 A
.
∂y
∂x
Из последнего соотношения следует, что давление P есть линейна функция x, а
скорость определяется следующей формулой:
∂υ x A
y a,
∂y η
υx
A 2
y ay b .
2η
Постоянные a и b могут быть определены из граничных условий:
h
A h2
h
A h2
y , υx ( y) 0
a b a 0, b
,
2
2η 4
2
2η 4
.
127
Таким образом, зависимость скорости υx ( y ) можно записать в следующем
виде:
dP
1 2 h 2 dP
1 h2
(8.3.11)
υx ( y) y
y 2 .
2η
4 dx
2η 4
dx
Согласно (8.3.11) эпюра скоростей (рис.8.4) представляется параболой.
Из формулы (8.3.11) легко получить среднюю и максимальную
скорости течения жидкости в зазоре:
h
h
2 2
2 h2
1 3 2
h 2 dP
,
υ x υ x dx
y y
η0
h 2η 4
3 0
12η dx
υmax 3
h 2 dP
υmax υ x y 0
,
.
(8.3.12)
8η dx
υ
2
Знак скорости определяется знаком градиента давления. Если давление
уменьшается вдоль оси x, то dP dx 0 , а υx 0 , т. е. скорость направлена в
сторону уменьшения давления.
Найдем силу, действующую на единицу площади верхней и нижней
поверхности в направлении оси x.
υ
σ xn h σ xk nk y h 1σ xy y h σ xy y h η x
,
y
h
y
2
2
2
2
y
2
.
Дифференцируя уравнение (8.3.11), получим:
h dP
.
(8.3.13)
2 dx
Как и в задаче Куэтта, сила, действующая на единичную площадкуна
верхней и нижней поверхности, равна – Р и + Р, соответственно.
Объемный и массовый расходы жидкости через любое сечение,
перпендикулярное оси x (единичной ширины), равны соответственно:
h 3 dP
ρh 3 dP
QV S υ x hυ x
, Qm ρhυ x
.
(8.3.14)
12 η dx
12 η dx
σ xn
h
y
2
σ xy
h
y
2
8.3.4. Цилиндрическое течение Пуазейля
Рассмотрим установившееся изотермическое движение вязкой
несжимаемой жидкости в круглой цилиндрической неограниченно длинной
трубе, вызываемое постоянным градиентом давления, который направлен
вдоль оси трубы. Для решения естественно воспользоваться цилиндрической
системой координат. Уравнение Навье-Стокса, уравнение непрерывности для
несжимаемой жидкости, а также компоненты тензора напряжений в
цилиндрической системе координат имеют вид:
128
υφ ∂υr
∂υr
∂υ
∂υ υφ
1 ∂P
1.
υr r
υz r
∂t
∂r
r ∂φ
∂z
r
ρ∂r
2
∂ 2υ
υr
1 ∂ 2 υr ∂ 2 υr 1 ∂υr 2 ∂υφ
ν 2r 2
2
2
2
2
∂
r
r
∂
φ
∂
z
r
∂
r
r
∂
φ
r
,
2.
∂υφ
∂t
υr
∂υφ
∂r
υφ ∂υφ
r ∂φ
υz
∂υφ
∂z
υr υφ
r
1 ∂P
rρ ∂ φ
∂ 2 υφ
∂ 2 υφ
∂ 2 υφ
υφ
1
1 ∂υφ
2 ∂υ r
ν
2
2
2
2
2
∂ r2
r
∂
φ
∂
z
r
∂
r
r
∂
φ
r
,
(8.3.15)
3.
υφ ∂υ z
∂υz
∂υ
∂υ
1 ∂P
υr z
υz z
∂t
∂r
r ∂φ
∂z
ρ∂z
∂ 2 υz 1 ∂ 2 υz ∂ 2 υz 1 ∂ υz
ν
2
2
r ∂ φ2 ∂ z 2 r ∂ r
∂r
,
,
∂ υ r 1 ∂ υφ
∂ υ z υφ
0,
∂r r ∂φ
∂z
r
υφ
1 ∂ υr ∂ υφ
∂υ
,
5. σ rr P 2η r , σ rφ η
∂r
r
∂
φ
∂
r
r
∂ υφ
∂υ
1 ∂ υz
, σ zz P 2η z ,
σ φz η
r ∂φ
∂z
∂z
∂ υφ
1 ∂ υφ
∂ υr
∂ υ
.
σ zr η z
, σ φφ P 2η
∂z
r
∂
φ
∂
r
∂r
Снова будем полагать, что если труба расположена горизонтально, то
сила тяжести не влияет на движение жидкости в трубе. Естественно направить
ось z вдоль оси трубы. Будем также полагать, используя гипотезу 2, что
скорости частиц жидкости в трубе имеют единственную компоненту,
направленную вдоль оси трубы и зависящую только от радиуса r.
Следовательно, необходимо решить уравнение Навье-Стокса при следующих
условиях:
∂υ
0, f 0, υ z υ z r , υ υr 0, T const, ρ const. (8.3.16)
∂t
При условиях (8.3.16) из уравнений (8.3.15) получим:
4.
129
∂ 2 υz 1 ∂υz
∂P
∂P
∂P
, 0 0 .
(8.3.17)
0,
0,
η 2
∂r
∂φ
∂z
r ∂ r
∂r
Из первого и второго уравнения системы (8.3.17) следует, что при заданной
топологии течения давление не должно зависеть ни от r, ни от , а может быть
функцией только z. Поскольку v z зависит только от r, то имеем:
dP
1 d d z
A
r
.
dz
r dr dr
После интегрирования получаем:
A
z (r ) r 2 a ln r b .
4
Поскольку на оси трубы не может быть бесконечной скорости, то постоянную
a следует положить равной нулю. Постоянную b найдем из граничных условий:
A
r r0 , z 0, b r02 .
4
Подставляя b в выражение для скорости, имеем:
1
dP
υ z (r ) r02 r 2 .
(8.3.18)
4η
dz
Теперь нетрудно вычислить максимальную и среднюю скорости
движения жидкости по трубе.
r 2 dP
max z r 0 0
,
4 dz
1 r0 2 π
υz 2 υz r rdrdφ
πr0 0 0
r0
r02 dP 1 2 1 r 4
r02 dP υmax
r
,
2.
2η dz 2
4 r02 0
8η dz
υz
Направления скоростей определяются направлением градиента давления.
Для объемного и массового расхода жидкости через любое сечение
трубы имеем формулу Пуазейля:
πr04 dP
QV πr υ z
,
8η dz
2
0
ρπ r04 dP
Qm ρQV
.
8η dz
(8.3.19)
Найдем силу, действующую на единицу площади поверхности трубы в
направлении оси z.
zn zk nk zr nr z n zz n z , n z n 0, nr 1 .
Используя формулы (8.3.15), имеем:
r dP
.
zn zr z r z 0
z r r0
2 dz
r
r r r0
Вычислим силу, действующую на кольцевой элемент трубы диной z в
направлении оси z. Согласно определения силы сопротивления имеем:
130
r P
2
F 2r0 z zn 2r0 z 0
r0 P1 P2 .
2 z
Из последнего соотношения видно, что разность сил давлений Р1 и Р2,
действующих на жидкость в двух любых сечениях трубы S1 и S2, разделенных
расстоянием z , уравновешивается вязкой силой, действующей на боковую
поверхность рассматриваемого элемента участка трубы. Очевидно, это следует
из закона Ньютона, т. к. лишь при равенстве сил рассматриваемый элемент
объема жидкости будет находиться в состоянии покоя или равномерного
прямолинейного движения.
8.3.4. Определение коэффициента вязкости методом потока
Формула Пуазейля может быть использована для измерения
коэффициента динамической вязкости жидкости. Согласно формуле (8.3.19)
для вычисления этого коэффициента необходимо измерить массовый или
объемный расход жидкости, значения радиуса трубы и градиента давления,
поставив опыты следующим образом.
1. Пусть в сосуде 1 (рис.8.5) налита жидкость, коэффициент
динамической вязкости которой необходимо измерить. Эта жидкость может
вытекать из сосуда 1 через тонкий капилляр 2 в сосуд 3. Если пренебречь
изменением уровня жидкости в сосуде 1, перепад давления на концах
капилляра
будет
равен
P0
гидростатическому
давлению
жидкости на входе в капилляр, т.е. Р1 Р0 = P . Если это давление разделить
на длину капилляра, то получим
dP dz P l . Далее, зная время (по
1
секундомеру) и объем жидкости,
поступающей за это время в сосуд 3,
2
можно найти секундный объемный
P1
или массовый расход. Измеряя радиус
P0
капилляра
и
воспользовавшись
3 формулой Пуазейля (8.3.19), можно
вычислить
коэффициент
Рис. 8.5
динамической
вязкости жидкости.
Следует заметить, что расход жидкости пропорционален r04 , а, следовательно,
ошибка измерения коэффициента η за счёт ошибки измерения радиуса
увеличивается в 4 раза. Если объем исследуемой жидкости ограничен, то
нетрудно при решении задачи учесть изменение уровня жидкости в сосуде 1.
2. При не слишком точных относительных измерениях вязкости
капельных жидкостей сосуды и капилляр располагают по вертикали
(вискозиметр Энглера) и определяют расходы эталонной QЭ и исследуемой
131
QЖ жидкостей. Тогда коэффициенты вязкости эталонной и исследуемой
жидкостей будут относиться как их секундные расходы, т. е. QЭ QЖ Ж Э .
Зная коэффициент вязкости эталонной жидкости из каких-либо других точных
измерений, можно определить коэффициент вязкости исследуемой жидкости.
Этот метод широко используется для экспресс-контроля
в различных
технологических процессах при получении веществ с заданными свойствами.
3. Коэффициент динамической
вязкости газов может быть также
измерен следующим образом. Предположим, что имеется два сосуда,
содержащих один и тот же газ и соединенных тонким капилляром (рис.8.6).
Пусть объемы сосудов равны V1 и V2 , температура газа предполагается
неизменной. Предположим, что каким-либо способом увеличили давление в
сосуде V1 при закрытом запирающем
устройстве. Если капилляр открыть,
газ начнет перетекать из сосуда 1 в
z
сосуд 2 до тех пор, пока давления в
V2
V1
сосудах не выровняются. Найдем
Qm
закон изменения разности давлений
между сосудами с течением времени.
Уравнение состояния
для
идеального газа можно записать в
виде
Рис. 8.6
G
PV RT ,
где - масса моля газа, а G есть масса газа, занимающего объем V при
давлении P и температуре Т.
В начальный момент времени (до открытия капилляра) масса газа в
объемах V1 и V2 при давлениях P1 и P2 соответственно равна
G1
μ
P1V1 ,
RT
G2
μ
P2V2 .
RT
Обозначим через Qm массовый поток газа в единицу времени через сечение
капилляра, тогда можно записать следующие уравнения баланса:
dG1
dP
μ
V1 1 Qm ,
dt
RT
dt
dG2
dP
μ
V2 2 Qm .
dt
RT
dt
(8.3.20)
Здесь знаки (-) и (+) означают, что газ из объема V1 вытекает, а в объем V2
втекает. После вычитания в (8.3.20) из первого уравнения второго и
использования определения (8.3.19) для Qm можно легко получить:
d P1 P2 dP
RT 1 1
RT r04 1 dP
.
Q
dt
dt
V1 V2 m 8 Vп р dz
(8.3.21)
132
P есть средняя плотность газа при среднем давлении
RT
P P1 P2 2 ; dP dz есть градиент давления, равный P l , где l - длина
капилляра, Vпр V1V2 /(V1 V2 ) - приведенный объём.
Здесь
Решение однородного линейного дифференциального уравнения (8.3.21)
дает следующую зависимость для разности давлений:
P P0 e
αt
πr04
α
P.
8ηlVпр
,
(8.3.22)
Таким образом, измеряя временную зависимость разности давлений
между двумя сосудами, соединенными капилляром, можно по формуле
(8.3.22), используя нелинейный метод наименьших квадратов, определить
показатель экспоненты . Зная размеры капилляра, величину объемов и
среднее давление, можно вычислить коэффициент динамической вязкости газа.
Вышеописанные
идеи
экспериментов
являются
наиболее
распространенными в технике измерения вязкости жидкостей и газов.
8.3.5. Движение жидкости между двумя вращающимися цилиндрами
Рассмотрим
установившееся
движение
несжимаемой
вязкой
изотермической жидкости между двумя коаксиальными вращающимися
цилиндрами. Будем считать цилиндры неограниченно длинными настолько,
что краевыми эффектами можно пренебречь. Пренебрегаем также действием
силы тяжести. Пусть цилиндры радиусами R1 и R2 R2 R1 вращаются с
угловыми скоростями 1 и 2 , соответственно (рис. 8.7). При решении задачи
естественно воспользоваться цилиндрической системой координат. Используя
интуитивные гипотезы, будем полагать:
∂υ
0, f 0, υr υz 0, υφ υφ r , P Pr , ρ const.
∂t
r
Рассматривая уравнение движения в
цилиндрических координатах (8.3.15) при
заданной топологии течения, получим
2
υφ
1 ∂P
1.
,
r
ρ ∂r
R1
R2
1
2
Рис. 8.7
(8.3.23)
2.
∂ 2 υφ
υφ
1 ∂ υφ
2 0, (8.3.24)
r ∂r
r
∂r 2
3. 0 0,
4. 0 0.
Следует заметить, что как первое, так
133
и второе уравнение для определения скорости не содержат коэффициента
динамической вязкости η .
Решение второго уравнения в (8.3.24) имеет следующий вид:
b
υφ ar .
(8.3.25)
r
Граничные условия для определения постоянных можно записать следующим
образом:
r R1 , υφ ω1 R1 ; r R2 , υφ ω2 R2 .
Постоянные a и b в (8.3.25) могут быть найдены из системы уравнений:
ω1 R1 aR1
b
b
, ω2 R2 aR2
.
R1
R2
Решение этой системы уравнений приводит к результату:
ω2 ω1 R12 R22 .
ω R 2 ω2 R22
(8.3.26)
a 1 12
,
b
R1 R22
R12 R22
Так как распределение скорости υφ в зазоре между цилиндрами не зависит от
коэффициента динамической вязкости, то такое распределение может иметь и
идеальная жидкость, не обладающая вязкостью по определению.
Проанализируем полученное решение.
1. Если 1 2 (вращение цилиндров в одну сторону), то υφ ωr ,
т.е. жидкость в зазоре вращается как абсолютно твердое тело с постоянной
угловой скоростью, равной скорости вращения цилиндров. Как показано выше,
такое вращение жидкости является непотенциальным, вихревым движением.
2. Если 2 0, R2 , то υφ ω1 R12 r . Как было установлено выше,
циркуляция скорости по любому контуру, не охватывающему цилиндр, равна
нулю. Циркуляция скорости по любому контуру, охватывающему цилиндр,
равна: 2 πrυφ 2 πR12 ω1 . Очевидно, во всех плоскостях, перпендикулярных
оси цилиндра, движение жидкости одинаково и может считаться плоским. Как
было определено выше, такое движение называют плоским вихрем, и движение
в нём безвихревое, потенциальное. Таким образом, движение вязкой
несжимаемой
жидкости,
покоящейся
на
бесконечности,
является
потенциальным во всех точках объема вне цилиндра.
При неслишком больших скоростях набегающего потока и угловой
скорости цилиндра подъемная сила, возникающая при обтекании цилиндра с
циркуляцией, может быть определена следующим образом:
Fy ρυ 2 πρυ R12 ω1 .
Направление подъемной силы и её величина определяются значениями
как скорости набегающего потока, так и направлением угловой скорости
134
вращения цилиндра. При прочих равных условиях величина подъемной силы
пропорциональна квадрату радиуса цилиндра.
Распределение давления в зазоре между цилиндрами можно определить
из первого уравнения системы (8.3.24)
2
2
ρυφ
1 2 2
1
b
1 b2
c.
P
dr ρ ar dr ρ a r 2ab ln r
r
r
r
2 r 2
2
Постоянная с может быть определена из граничных условий: при r R1 , P P1
или при r R2 , P P2 .
Если 1 2 и жидкость несжимаемая, то υφ ωr и распределение
давления в зазоре имеет вид:
P(r ) P1
r r1 , P P1 ,
1
ρω 2 r 2 R12 .
2
(8.3.26а)
Для сжимаемого газа, вращающегося в цилиндре радиуса r0, массовая
плотность зависит от радиуса ρ ρ(r ) . Поэтому в первом уравнении системы
(8.3.24) плотность ρ необходимо определить через давление и температуру из
термического уравнения состояния P / ρ RT . Решение этого уравнения даёт
следующее распределение давления:
dP r0 ω 2
rdr,
P(r ) P
r RT
P0
P(r ) P0 e
ω2 2 2
( r0 r )
2 RT
.
(8.3.26б)
Определим момент М1 сил трения, действующих на единицу длины
внутреннего цилиндра,
υφ
∂υφ
.
M 1 F R1 S n R1 2R1 r R1 ,
σ φr η
∂
r
r
r R1
Подставляя значение υφ (8.3.25) и дифференцируя, получим
22 1 R22
2b
.
r r R 2
R1
R12 R22
Тогда момент сил трения определяется по формуле
42 1 R12 R22
.
(8.3.27)
M1
R12 R22
Очевидно, на единицу длины внешнего цилиндра действует такой же момент
сил трения, но с обратным знаком.
1
135
На основе полученного точного решения можно организовать опыт,
позволяющий определить коэффициент вязкости жидкости (рис. 8.8).
Определяя момент сил трения по углу закручивания нити 1, на которой
подвешен неподвижный внутренний цилиндр 2,
1
по формуле (8.3.27) можно определить
коэффициент вязкости жидкости. При этом
2
геометрические размеры цилиндров и угловая
скорость вращения внешнего цилиндра должны
быть известны. Существенную конструктивную
трудность такой установки представляет
устранение влияния торцов цилиндров, т. к.
точное решение, полученное выше, справедливо
Рис. 8.8
лишь для бесконечных цилиндров.
.
136
8.4. МЕДЛЕННОЕ ОБТЕКАНИЕ ШАРА ПОТОКОМ ВЯЗКОЙ, НЕСЖИМАЕМОЙ
ЖИДКОСТИ
8.4.1. Решение уравнения Навье-Стокса
Пусть неподвижный шар радиусом r0 обтекается вязкой несжимаемой
жидкостью со скорость u на бесконечности в отсутствии внешних сил.
Движение будем считать изотермическим и стационарным, тогда уравнение
движения имеет вид:
υ υ 1 P νυ .
(8.4.1)
ρ
Оценим порядок слагаемых этого уравнения. Скорость набегающего
потока u уменьшается до нуля на поверхности шара на расстоянии, равном
приблизительно диаметру шара. Поэтому имеем:
u2
υ υ ,
d
νυ
η u
,
ρ d2
υ υ ρud Re
νυ
η
.
Если безразмерное отношение ud Re будет значительно меньше
единицы, то в уравнении движении слагаемым υ υ можно пренебречь по
сравнению с остальными слагаемыми. Это безразмерное отношение называют
числом Рейнольдса (Re). Очевидно, число Рейнольдса показывает во сколько
раз инерциальные силы в жидкости больше вязких сил.
Таким образом, если Re 1 , то уравнение движения (8.4.1) имеет вид:
ηυ P 0 .
(8.4.2)
Применяя операцию rot к уравнению (8.4.2), получим:
rotυ 0 , т. к. rot 0 .
(8.4.3)
Представим скорость движения частицы жидкости в виде суммы двух
составляющих, т. е. υ u υ , имея в виду, что добавка υ обращается в нуль на
бесконечности. Из условия несжимаемости жидкости имеем:
divυ 0, divu υ 0, divυ 0 , т. к. divu 0 .
Поэтому добавка υ может быть представлена в виде υ rotA т. к. divrotA 0 .
Уравнение (8.4.3) преобразуется к виду:
rotrotA 0 .
(8.4.4)
По условию задачи (рис. 8.9) имеется два полярных вектора: радиусвектор r точки наблюдения на линии тока и вектор u скорости набегающего
потока. Добавка υ является также полярным вектором. Поэтому вектор A
должен быть аксиальным вектором, т. к. ротор аксиального вектора является
полярным.
Аксиальный вектор A будем искать в виде
137
A f1 r n u,
r
n .
(8.4.5)
r
Здесь f 1 r есть произвольная функция модуля радиуса-вектора r , n единичный вектор направления радиуса-вектора r .
y
υ
u
n
r
0
x
Рис. 8.9
Будем искать функцию f 1 r в форме производной по r некоторой
функции f(r), т. е.
f
f
f
f1 r ,
n
f .
(8.4.6)
r
r
r
Из векторной алгебры известно, что
rot fu f rotu f u .
Вектор скорости набегающего потока u постоянный, поэтому
rotu 0,
rot(fu)=[ f·u] .
(8.4.7)
Учитывая (8.4.6), (8.4.7), вектор A (8.4.5) можно записать в виде:
A
f
n u f u rot fu .
r
(8.4.8)
После подстановки (8.4.8) в (8.4.4) имеем:
rotrotrot fu 0 .
(8.4.9)
Если воспользоваться известным соотношением из векторной алгебры
вида
rotrot div ,
divrot 0 ,
то из (8.4.9) с использованием (8.4.8) следует
rot fu f u 0 .
(8.4.10)
Применим операцию двойного лапласиана к i-ой компоненте вектора в
(8.4.10) и запишем это уравнение в тензорном виде:
138
f ui
2
2
f
ikl
ul
xn xn xm m
xk
2
2
ful f ui .
ikl
xk xn xn xm xm
(8.4.11)
Так как u const , то уравнение (8.4.10) можно записать в виде
f f 0,
f const .
(8.4.12)
Очевидно, постоянную в правой части последнего уравнения необходимо
положить равной нулю. Действительно, конечной целью решения является
определение скорости υ как функции координат. Но согласно определения
υ rotA и (8.4.8) υ определяется только вторыми производными f по
координатам, тогда как для нахождения f согласно уравнения (8.4.12)
предстоит проинтегрировать f по координатам четыре раза, т. е. f будет
пропорционально r 4 . Поэтому, если постоянную в (8.4.12) не полагать равной
нулю, то скорость υ стремиться к при r , что противоречит её
определению.
Тогда в сферических координатах уравнение (8.4.12) имеет вид:
1 d 2 d
f 0 .
r
2
r dr dr
Интегрируя это уравнение, получим:
d
2a
2a
f 2 , f
c.
(8.4.13)
dr
r
r
Здесь знак (-) и коэффициент 2 в константе интегрирования выбраны для
удобства. По приведенным выше соображениям постоянную с также следует
положить равной нулю. Следующее интегрирование приводит к результату:
1 d 2 d
2a
d 2 d
r
f ,
r
f 2ar,
2
r dr dr
r
dr dr
(8.4.14)
b
2 df
2
r
ar b, f ar .
dr
r
При последнем интегрировании постоянная d интегрирования опущена, т. к.
скорость υ определяется производными по координатам, поэтому постоянная
интегрирования несущественна.
8.4.2. Распределение скорости в поле течения около шара
Используя определение скорости движения частиц жидкости, имеем:
υ u rotf u u rotrot fu u div fu .
(8.4.15)
Поскольку u - постоянный вектор, то, используя (8.4.14), третье
слагаемое в (8.4.15) преобразуем к виду:
139
2a
,
r
∂f
∂f
b
div fu uf fdivu u
0u
n a 2 u n .
∂r
∂r
r
Аналогично преобразуем второе слагаемое в (8.4.15):
b
a b a b
div fu u n a 2 u r 3 3 u r
r
r r r r
fu u f u
a b a b
a 3b
u r 3 3 u 2 4 u r n
r
r r r r
r
После подстановки полученных выражений в (8.4.15) и группировки
соответствующих слагаемых вектор скорости потока в точке r поля течения
равен:
υua
u u n n
3u n n u
b
,
r
r3
r
n .
r
(8.4.16)
Постоянные a и b должны быть определены из граничных условий на
поверхности шара: при r r0 , υ 0.
Так как вектор скорости жидкости должен быть равен нулю в любой
точке на поверхности шара, т. е. при любой ориентации единичного
нормального вектора n , то, следовательно, должны обращаться в нуль в
отдельности коэффициенты при векторах u и u n n в выражении (8.4.16):
a b
a 3b
1. при u : 1 3 0, 2. при (u∙n)n : 3 0.
r0 r0
r0 r0
Решение
этой
системы
r
уравнений приводит к результату:
υ
r
y
r
r03
3
a r0 , b . (8.4.17)
ns
4
4
nr
Очевидно, что картина обтекания
u
шара
(рис.
8.10)
имеет
x
0
сферическую симметрию, поэтому
0 . Компоненты скорости r и
υθ могут быть найдены из (8.4.16)
Рис. 8.10
и (8.4.17) в виде:
u cos u cos 1 3 3u cos u cos
r0
,
r
4
r3
3 u sin 1 3 u sin
u sin r0
r0
.
4
r
4
r3
3
4
r u cos r0
140
Таким образом, компоненты υ r и υθ скорости движения индивидуальной
частицу при медленном обтекания шара потоком вязкой несжимаемой
жидкости определяются соотношениями:
3 r0 1 r03
3 r0 1 r03
u cos θ, υθ 1
(8.4.18)
υr 1
3 u sin θ.
3
2 r 2r
4 r 4r
На поверхности шара в любой точке υr υθ 0 , а, следовательно, и υ 0 в
соответствии с граничными условиями.
8.4.3. Распределение давления в поле течения около шара и
на его поверхности
Для определения силы, действующей на шар со стороны движущейся
жидкости, возвратимся к исходному уравнению (8.4.2)
P ηυ.
(8.4.19)
Согласно определению скорости υ она равна
υ u υ u rotA u rotfu u rotrot fu .
После подстановки этого определения в (8.4.19) имеем
P ηrotrot fu ηdiv fu .
(8.4.20)
Поскольку в соответствии с (8.4.12) f 0 , то из (8.4.20) следует
P ηdiv fu ηdiv fu .
(8.4.21)
После интегрирования данного уравнения по r и выбора в качестве
произвольной постоянной интегрирования давления жидкости P в
набегающем потоке вдали от шара, находим давление Р:
P P ηdiv fu ,
(8.4.22)
но div fu uf fdivu uf , т. к. divu 0 .
Поэтому имеем
P P ηuf P ηuf .
Принимая во внимание (8.4.13) для f и (8.4.17) для коэффициента a, получим
3
2 3
1
P P ηu r0 P ηu r0 ,
2
r 4
r
3r
P P η 02 u n .
(8.4.23)
2r
Формула (8.4.23) позволяет определить давление Р в любой точке r поля
течения вязкой несжимаемой жидкости вблизи шара.
На поверхности шара r r0 в плоскости наибольшего его поперечного
сечения распределение давления имеет вид:
141
P P
3 ηu
cos θ .
2 r0
(8.4.24)
Для сравнения ниже приведены распределения по поверхности давления
Рнеподв
при обтекании неподвижного цилиндра потоком идеальной
несжимаемой жидкости (7.6.12) и Рдвиг для двигающегося цилиндра в
неподвижной идеальной жидкости (7.6.39):
ρυ2
ρu 2
2
Pнеподв P
(1 4 sin θ ), Pдвиг P
(1 4 cos 2 θ ) .
2
2
Сила F, действующая на шар со стороны движущейся вязкой жидкости в
общем виде и в направлении радиуса-вектора r , определяется следующими
интегральными соотношениями:
F σ n dS ,
S
Fr σ r( n ) dS σ rk nk dS σ rr nr σ rθ nθ σ rφ nφ dS .
S
S
S
(8.4.25)
В качестве произвольного направления действия вязкой силы удобно
выбирать направление, совпадающее с направлением скорости набегающего
потока u . В этом случае проекции компонентов nr , nθ , nφ нормального
единичного вектора n к произвольному элементу поверхности шара dS в
(8.4.25) на направление скорости набегающего потока u равны (см. рис. 8.10)
nr cos θ,
nθ cos90 0 θ sin θ,
nφ 0 .
(8.4.26)
Проекция силы Fr на направление скорости u определяет силу
сопротивления шара Fu в потоке вязкой несжимаемой жидкости и в
соответствии с (8.4.25, 26) она равна
F σ cos θ σ sin θ dS Pδ σ~ cos θ ( Pδ σ~ sin θ dS .(8.4.27)
u
S
rθ
rr
S
rr
rr
rθ
rθ
Вычислим значение компонент тензора вязких напряжений ~rr и σ~rθ на
поверхности шара r r0 в сферической системе координат (8.3.14), используя
соответствующие компоненты скорости υ r и υθ (8.4.18):
σ~rr
r r0
∂υ
2η r
∂r
r r0
3 r0 3 r03 r 2
u cos 0 .
2η 2
6
2
r
2
r
r r0
Принимая во внимание, что на поверхности шара r r0 υr 0 и υθ 0 , из
(8.3.14) и (8.4.18) для σ~rθ r r0 имеем:
3 ηu
1 ∂ υr ∂ υθ υθ
σ~rθ r r0 η
sin .
∂r
r r r0
2 r0
r ∂θ
142
После подстановки распределения давления P по поверхности шара
(8.4.24) и значений ~rr и σ~rθ в (8.4.27) получим для Fu формулу:
3 ηu
3 ηu 2
3 ηu
3 ηu
Fu P0 cos θ
cos 2 θ
sin θ dS
dS
4πr0 .
2 r0
2 r0
2
r
2
r
S
S
0
0
Таким образом, при медленном Re 1 обтекании шара вязкой несжимаемой
жидкостью сила сопротивления равна:
Fu 6 πr0 ηu .
(8.4.28)
Формулу (8.4.28) называют формулой Стокса. Формула Стокса имеет
широкое применение. Она используется для измерения коэффициентов
вязкости жидкостей по методу падающего шарика, использовалась
Милликеном при определении величины заряда электрона. Эта формула часто
используется при изучении движения мелких пылинок или капель жидкости в
атмосфере и т. д.
Более точное решение задачи Стокса с учетом нелинейного слагаемого
υυ в уравнении движения Навье-Стокса в области чисел Рейнольдса Re 1
было получено Осееном:
3
Fu 6 πr0 ηu1 Re ,
8
Re
ρr0 u
η
(8.4.29)
Как показывает опыт, формула Осеена справедлива до чисел Рейнольдса
порядка единицы. При дальнейшем увеличении числа Рейнольдса картина
обтекания шара существенно изменяется (наблюдается отрыв потока с
поверхности с образованием застойной зоны за шаром) и вышеприведенное
рассмотрение не справедливо.
При малых числах Рейнольдса аналогичную задачу можно решить для
произвольного эллипсоида и даже диска. Так для тонкого диска,
расположенного перпендикулярно и параллельно набегающему потоку, сила
сопротивления равна Re 1 :
Fu 16 r0 ηu,
Fu
32
r0 ηu .
3
В системе CGS коэффициент динамической вязкости определяют в
пуазах. Один пуаз есть динамическая вязкость такой среды, в которой
площадка в 1см2 одного слоя испытывает со стороны другого слоя силу в 1
дину при градиенте скорости между слоями в 1 см/с на 1 см длины.
В системе СИ коэффициент определяют в единицах, определяемых
соотношением
1 пуаз 1
дина с
ньютон с
0,1
.
2
см
м2
143
Коэффициент кинематической вязкости ν η ρ определяется в стоксах
соотношением
2
см 2
4 м
1стокс 1
10
.
с
с
Для сведения в таблице 3.1 приведены значения коэффициентов
динамической и кинематической ν вязкости для некоторых сред при
температуре 300К.
Следует отметить, что коэффициент динамической вязкости как газов,
так и жидкостей не зависит от давления в диапазоне Р < 10 атм.
Таблица 3.1
,
Вещество
нс
м2
м2
,
с
Вода
1.010-3
1.010-6
Воздух
1.810-5
1.510-5
Спирт
1.810-3
1.210-6
Глицерин
0.85
6.810-4
Ртуть
1.610-3
1.210-7
Динамическая вязкость газов с увеличением температуры увеличивается
в соответствии с законом
η AT n ,
0.5 n 1.5 .
Динамическая же вязкость жидкостей с увеличением температуры
уменьшается. Экспериментальные данные по температурной зависимости
коэффициентов динамической вязкости жидкостей хорошо описываются
формулой
B
η C exp .
T
Здесь A, B и C - некоторые эмпирические константы.
9. МЕТОД ПОДОБИЯ И АНАЛИЗ РАЗМЕРНОСТЕЙ
В теме 8 рассмотрено несколько точных решений уравнений движения
вязкой жидкости. Можно было бы указать ещё несколько примеров и тем
самым исчерпать весь список имеющихся точных решений.
Однако практика настоятельно требует решения задач, которые в силу
математических трудностей не могут быть решены аналитически точно. В
этих многочисленных случаях необходимо обращаться непосредственно к
эксперименту. Но и экспериментальные данные не всегда возможно получить
на тех объектах, для которых решается данная задача. Например, хотелось бы
знать силу сопротивления, которую испытывает новая, проектируемая
конструкция самолёта при движении его с заданной скоростью на
определенной высоте. Зная силу сопротивления можно было бы выбрать
двигатель, обеспечивающий заданную скорость. Вообще говоря, можно
изготовить полностью такой самолёт, поставить на него некоторый двигатель
и, поднявшись на заданную высоту, измерить скорость. Но ведь данный
двигатель может и не развить заданную скорость, а в распоряжении
конструктора сегодня может и не оказаться подходящего двигателя. В
принципе, методом проб и ошибок можно было бы каким-либо
компромиссным способом проблему всё же решить, однако такой путь связан
с колоссальными материальными и временными затратами. То же самое
можно было бы сказать о проблемах проектирования больших турбин, ракет,
самолётов и т.д.
Поэтому, конечно, было бы интересно опыты проводить на моделях
реальных объектов в условиях полностью подчиняющихся и контролируемых
экспериментатором. Однако возникает существенный вопрос, в какой мере,
когда и как возможно результаты, полученные на моделях, применять к
натурным объектам. На этот вопрос отвечает теория подобия
гидродинамических движений.
9.1. БЕЗРАЗМЕРНЫЕ УРАВНЕНИЯ
ДВИЖЕНИЯ
Рассмотрим уравнение Навье - Стокса в поле силы тяжести, которое имеет
вид
υ
1
η
1
1
υ υ P υ ζ η graddivυ g .
t
ρ
ρ
ρ
3
(9.1.1)
142
Для неслишком быстрых движений или одноатомных газов, молекулы
которых не обладают внутренними степенями свободы, объёмная вязкость не
существенна и будем полагать её равной нулю, т.е. = 0. Кроме того, для
простоты будем полагать движение изотермическим (Т const ). Тогда уравнение
баланса внутренней энергии можно не рассматривать.
Приведем уравнение движения (9.1.1) к безразмерному виду. Для этого
выберем некоторые характерные размерные величины. Пусть L - некоторый
характерный размер обтекаемого тела (диаметр шара, трубы, большая ось
эллипса, хорда профиля крыла и т.д.). Тогда размерные координаты можно
записать в виде
x x* L ,
y y* L ,
z z* L .
Здесь x* , y* , z* - некоторые безразмерные координаты. Очевидно, что
переход к безразмерным координатам при помощи данных соотношений
просто означает переход к другому масштабу измерений расстояний: все
расстояния измеряются в долях расстояния L, которое принято за единицу
измерения.
Пусть далее υ есть некоторая характерная скорость движения среды например, скорость набегающего потока или скорость движения потока в
центре трубы. Тогда скорость среды в любой точке потока можно записать:
υ υ* υ .
Для нестационарных задач выберем также некоторое характерное время ,
которое может быть или периодом движения для периодических движений,
временем релаксации к стационарному движению или просто временем
прохождения выбранного расстояния L с выбранной характерной скоростью
υ . Переход к безразмерному времени аналогичен: t t * .
Принимая за характерное давление и плотность, например, давление и
плотность в набегающем потоке, имеем:
P P* P ,
ρ ρ* ρ .
Наконец, измеряя ускорение силы тяжести в долях ускорения силы тяжести
на поверхности земли g 0 , получим g g * g 0 . Тогда каждое слагаемое
уравнения (9.1.1) можно записать в следующем безразмерном виде:
υ υ υ
,
t
τ t
P P P
,
ρ
ρ L ρ
(υ)υ
υ2
(υ )υ ,
L
η
υ 1
υ η 2
υ ,
ρ
ρ L ρ
1 1
1 υ 1
ηgraddivυ η 2
grad div υ .
ρ 3
3 ρ L ρ
(9.1.2)
143
Подставляя полученные соотношения в уравнение Навье-Стокса, и деля на
коэффициент при конвективном слагаемом, получим:
L υ
P 1
η
1
υ υ 2
P
τυ t
ρ υ ρ
ρ υ L ρ
1
g L
υ grad div υ 02 g .
3
υ
(9.1.3)
Аналогично можно записать уравнение непрерывности в безразмерном
виде:
ρ τυ
div ρ υ 0 .
t
L
(9.1.4)
Обозначим безразмерные коэффициенты в уравнениях (9.1.3) и (9.1.4)
следующим образом:
ρ υ2
M2,
P
υ τ
St ,
L
L
Re ,
2
Fr .
gL
(9.1.5)
Тогда уравнение (9.1.3) и (9.1.4) можно переписать в виде
1 υ
1 1
1 1
υ υ 2 P
St t
M ρ
Re ρ
1
1
υ grad div υ
g
3
Fr
ρ 1
div ρ υ 0 .
t St
.
(9.1.6а)
(9.1.6б)
При неизотермическом движении безразмерное уравнение состояния для
идеального газа имеет вид:
P P R TT
P RT
,
,
ρ ρ μ T
ρ
μ
P
const T .
ρ
(9.1.6в)
Тогда любое решение системы уравнений (9.1.6) независимо от формы
движения жидкости в общем случае имеет вид:
υi
υi
f St , Re, M , Fr , x , y , z , t ,
υ
(9.1.8)
где St - число Струхаля, M - число Майевского, Re - число Рейнольдса, Fr число Фруда. Аналогичное выражение можно записать и для безразмерного
давления P* и плотности ρ* .
144
9.2. ГАЗОДИНАМИЧЕСКОЕ ПОДОБИЕ ПОТОКОВ
Из (9.1.6,7) следует, что два изотермических потока будут динамически
подобны, если выполняются, прежде всего, следующие равенства:
St 1 St 2 , M 1 M 2 , Re 1 Re 2 , Fr1 Fr2 .
Эти безразмерные коэффициенты называют безразмерными критериями или
числами динамического подобия потоков.
Очевидно также, что динамически подобными могут быть лишь
потоки, обтекающие геометрически подобные тела, которые одинаково
расположены к направлению набегающего потока. Геометрически подобные
тела - эта такие тела, для любых сходственных точек поверхности которых
их безразмерные координаты одинаковы, если за характерный размер L
принят один и тот же сходственный размер (например, большая эллипсоида),
за начало координат принята одна и та же сходственная точка. Или иначе, для
геометрически подобных тел уравнения их поверхностей в безразмерных
координатах полностью совпадают, если за характерный размер принят один
и тот же сходственный размер.
Действительно, из граничных условий следует, что на поверхности
некоторого неподвижного тела скорость должна быть равна нулю.
Следовательно, она будет равна нулю на поверхности другого тела только в
том случае согласно (9.1.7), если безразмерные координаты сходственных
точек его поверхности будут равны безразмерным координатам тела, т.е. если
тела будут геометрически подобными. Требование одинаковости
сходственного размера и одинаковости расположения тела по отношению к
набегающему потоку также очевидны из необходимости удовлетворения
граничных условий.
Таким образом, два изотермических потока жидкости будут
динамически подобными, если, во-первых, они обтекают геометрически
подобные тела; во-вторых, одинаково расположены по отношению к
набегающему потоку и, в-третьих, равны их критерии подобия Струхаля,
Рейнольдса, Майевского и Фруда. Динамическое же подобие означает, что в
сходственных точках потоков (одинаковые безразмерные координаты) и в
сходственные моменты времени (одинаковые безразмерные времена)
безразмерные скорости, плотность и давление одинаковы.
Здесь для простоты рассмотрено динамическое подобие лишь
изотермических потоков. В общем случае необходимо было бы рассмотреть
так же уравнение баланса внутренней энергии, что привело бы к введению
еще некоторых критериев подобия, которые необходимо было бы соблюдать
при осуществлении динамически подобных потоков.
145
9.3. СИЛА СОПРОТИВЛЕНИЯ. КОЭФФИЦИЕНТЫ СОПРОТИВЛЕНИЯ.
Рассмотрим обтекание некоторого неподвижного тела. Вычислим силы,
действующие со стороны жидкости на обтекаемое тело. Сила, действующая в
направлении оси i со стороны ньютоновской жидкости на единичную
площадку поверхности тела с нормальным единичным вектором n , направленным
вне тела, равна:
υ
σ i n σ ik nk Pδik σ~ik nk P Pδik η σ~ik nk .
L
Тогда силу, действующую в i-ом направлении на всю поверхность тела S,
можно записать в следующем виде:
υ
Fi P P δik η σ~ik nk dS .
L
S
Пусть S есть некоторая характерная площадь обтекаемого тела, это,
например, площадь поверхности тела или площадь наибольшего сечения тела
плоскостью, перпендикулярной набегающему потоку, - миделево сечение и т.п.
Умножая и деля полученное выражение на постоянную величину ρ υ2 S / 2 ,
получим:
1
1
2
dS
Fi ρ υ2 S 2 P δik 2 σ~ik k .
2
Re
S M
S
(9.3.1)
Из решения системы уравнений (9.1.6) следует, что безразмерные
давление P и плотность ρ являются как и безразмерная скорость υi в (9.1.7)
функциями лишь безразмерных критериев подобия, безразмерных координат
и безразмерного времени. При вычислении силы, действующей на
обтекаемое тело, в (9.3.1) необходимо подставить значения P* и * на
поверхности тела, для каждой точки которой безразмерные координаты есть просто
некоторые числа. Поэтому результат интегрирования будет зависеть только от
безразмерных критериев подобия и безразмерного времена.
Таким образом, в общем случае имеем
Fi Fi ( St , M , Re, Fr ) .
Рассмотрим для простоты стационарное движение. Пусть скорость
набегающего потока направлена вдоль оси х, а ось y - вертикально вверх. Тогда
на основании соотношения (9.3.1) в общем случае для стационарного
движения (St=0) имеем:
146
Fx
1
2 SC x Re, M , Fr ,
2
1
2 SC y Re, M , Fr ,
2
1
Fz 2 SC z Re, M , Fr .
2
Fy
(9.3.2)
Здесь силы Fx , Fy , Fz называют силой лобового сопротивления, подъёмной
силы и боковой силы, а безразмерные коэффициенты C x , C y , C z коэффициентами лобового сопротивления, подъёмной и боковой силы
соответственно. Из формулы (9.3.1) следует, что коэффициенты
сопротивления геометрически подобных тел в динамически подобных
потоках равны: C iм C iн .
9.4. МОДЕЛИРОВАНИЕ
Теперь можно перейти к решению задачи, поставленной в начале
параграфа, о том, каким образом опыты на моделях могут помочь в решении
задачи об обтекании реальных объектов.
Очевидно, что, во-первых, модель реального тела и само тело или
натурный объект должны быть геометрически подобны. Во вторых, модель и
натурный объект одинаково расположены к набегающему потоку. И, втретьих, критерии подобия в потоках, обтекающих модель и натурный
объект, должны быть одинаковы. Тогда, измеряя распределения скорости,
давления и плотности среды, движущейся около модели, а также силу
сопротивления (а, следовательно, и коэффициенты сопротивления) модели,
можно простым пересчётом определить скорости, давления и плотности в
сходственных точках около натурного объекта и силу его сопротивления.
На практике в большинстве случаев нет нужды удовлетворять
равенству всех критериев подобия. Так, очевидно, при стационарных
движениях нет необходимости рассматривать число Струхаля. Во многих
случаях влияние силы тяжести на движение жидкости несущественно, и
можно игнорировать число Фруда. Однако, если эти ограничения числа
необходимых критериев вытекают из самой постановки задачи или условий
движения, то имеется более существенное ограничение, заключающееся в
том, что требования удовлетворения равенств сразу нескольких критериев
часто бывают противоречивыми.
Для примера рассмотрим требования, которые вытекают из
необходимости удовлетворить равенства чисел Майевского и Рейнольдса в
натурных (н) и модельных (м) движениях.
Для числа Майевского имеем:
147
2
2
P P .
м н
Mм Mн,
Если речь идёт о движении одной и той же среды около модели и натурного
объекта, то, разделив предыдущее соотношение на показатель адиабаты ,
получим:
Mм Mн,
P
c ,
2
2 ì 2 í
2 ,
c 2ì
cí
где c ì , cí - скорости звука в набегающем потоке в модельном и натурном
движении, соответственно.
Таким образом, необходимо удовлетворить равенствам по числам Майевского
и Рейнольдса:
M м M н , Re м Re н ,
2 ì 2 í
ì 2 ì Lì í 2 í Lí
,
ì
c 2ì
cí2
(9.4.1)
Если модель в десять раз меньше объекта, т.е. Lн / Lм 10 , то при
скорости обтекания объекта воздухом, равной 100 м/сек, воздух еще можно
считать несжимаемым. При одинаковых плотностях ( м = н ) и
коэффициентах динамической вязкости ( ì í ) согласно равенству (9.4.1)
необходимо обдувать модель со скоростью 317 м/сек. Но при такой скорости
движения воздух нельзя считать несжимаемым и движение его около тела
имеет весьма специфический характер (возникают ударные волны, скачки
уплотнения). Но это противоречит и первому равенству в (9.4.1), из которого
следует, что скорости набегающих потоков на объект и модель должны быть
одинаковыми, если скорости звука в потоках одинаковы. Известно, что
скорость звука в газе зависит лишь от его температуры, и, если газ в
модельном опыте не подогревать специально, то скорости звука в обоих
случаях будут равны. Поэтому имеется лишь два выхода: или осуществить
лишь частичное подобие по одному какому-либо критерию, а влияние другого
учитывать приближенно при помощи каких-то дополнительных опытов или
расчетов, или изменять в модельном эксперименте параметры газа (давление,
плотность, температуру) или даже сменить сам газ на газ, обладающий
другой вязкостью или скоростью звука. К сожалению, вязкости всех газов
отличаются не более чем в 4 раза, и зависят от температуры лишь как корень
квадратный от абсолютной температуры. Поэтому более перспективным в этом
отношении является изменение давления или плотности газа в модельном
эксперименте.
Рассмотрим второй пример. Предположим, что необходимо определить
силу лобового сопротивления некоторой новой конструкции самолета при
скорости его полета в нижних слоях атмосферы, равной 720 км/час или 200
м/сек. Предположим, что изготовлена точная копия этого самолета - модель, в
десять раз меньшая. Если модель обдувается также воздухом при той же самой
148
температуре ( ì í ), то скорость набегающего потока на модель должна
быть равна:
L
d
Re н Re м ,
Re
,
м м н н н 10 н н .
н L м м
м
Если плотности газа в набегающих потоках оставить одинаковыми, то
моделирование невозможно, т.к. М н М м . Для обеспечения равенства и чисел
Маха необходимо при одинаковых температурах увеличить плотность воздуха в
модельном эксперименте также в 10 раз.
Предположим, что удалось увеличить плотность модельного потока по
сравнению с натурной плотностью только в 8 раз. Тогда скорость набегающего
на модель потока должна быть равной 250 м/сек и можно приближенно считать,
что модельный и натурный потоки динамически подобны, т.к. числа Маха
будут отличаться незначительно, а скорость набегающего на модель потока
остается дозвуковой.
Если каким-либо способом удаётся измерить силу лобового
сопротивления модели, то по формуле (9.3.2) можно определить коэффициент
лобового сопротивления, который будет одинаковым как у модели, так и у
натурного объекта, т.к. в данном случае предполагается, что он зависит
только от числа Рейнольдса. Но по условию (9.4.1) они для модельного и
натурного движения одинаковы. Тогда нетрудно рассчитать коэффициент и
силу лобового сопротивления объекта:
c xì c xí
Fxì
1
ì 2 ì S ì
2
2
Fxн Fxм
Fxí
1
í 2 í S í
2
н 2 н S н 1 20
100 Fxм ;
м 2 м S м 8 25
,
S м L2м
; Fxн 8 Fxм
S н L2н
Зная экспериментальное значение силы лобового сопротивления модели, можно
вычислить лобовое сопротивление натурного объекта, а, следовательно, и выбрать
двигатель для обеспечения заданной скорости полета создаваемой конструкции
самолета - 720 км/час. В действительности, в аэродинамических лабораториях
снимают серии зависимостей ci f Re, M , которые позволяют конструкторам
оптимизировать данную конструкцию самолета и выбор двигателя.
Если необходимо определить скорость воздуха, например, в какой-либо
заданной точке на поверхности крыла самолета, то достаточно измерить её на
модели в той же сходственной точке. Тогда из (9.1.5) следует:
*н * м ,
м
н ,
м н
н м
н
20
4
м
м .
м
25
5
Измеряя скорости движения газа около модели в различных точках, можно
определить скорости движения газа во всех сходственных точках натурного
объекта.
149
9.5. АНАЛИТИЧЕСКИЕ КОЭФФИЦИЕНТЫ СОПРОТИВЛЕНИЯ
Во всех случаях, когда сила сопротивления может быть вычислена аналитически, предоставляется возможность аналитически вычислить и
коэффициенты сопротивления. Рассмотрим движение вязкой несжимаемой
жидкости в круглой цилиндрической трубе. Воспользуемся общей формулой
(9.3.1) для вычисления коэффициентов сопротивления c x Re .
2
Sc x Re .
(9.5.1)
2
В данном случае плотность жидкости постоянная, поэтому . В
качестве характерной скорости можно выбрать среднюю скорость
движения жидкости по трубе . За характерную площадь S можно принять
площадь «трущейся» боковой поверхности трубы радиусом r0 и длиной l.
Как было показано в предыдущем разделе, вязкая сила, действующая на
рассматриваемый участок трубы со стороны жидкости, равна разности
давлений на этом участке, умноженной на площадь поперечного сечения
трубы, т.е.
Fx
2
2r0lc x .
2
Средняя по сечению трубы скорость согласно (8.3.19) равна
Fx r02 P
(9.5.2)
r02 dP r02 P
,
8 dx 8 l
Подставляя P как функцию в формулу для Fx (9.5.2), получим:
cx
8
16
16
;
r0 d Re
Re
d
.
(9.5.3)
Из последнего соотношения видно, что коэффициент сопротивления
является, действительно, функцией только числа Рейнольдса. Тогда,
используя формулу для силы сопротивления Fx (9.5.1), можно определить
разность давлений P на участке трубы длиной l в следующем виде:
2 l
P
4C x ;
2 d
2 l
P
;
2 d
4C x
64
.
Re
(9.5.4)
Принято называть коэффициентом гидравлического сопротивления трубы не
c x , а величину . Формула (9.5.4) является универсальной и позволяет
вычислять сопротивление трубы P на участке длиной l, если известен
коэффициент сопротивления , при любом характере движения жидкости в
150
трубе. Коэффициенты сопротивления участков трубы, имеющих некоторые
особенности (расширение, сужение, кран, задвижка, поворот и т.д.),
измерены экспериментально и вычисляются как функции числа Рейнольдса в
трубе по графикам или эмпирическим формулам.
Нетрудно вычислить коэффициент сопротивления шара при медленном
его обтекании вязкой несжимаемой жидкостью. В соответствии с формулой
Стокса сила сопротивления шара определяется как:
ρu 2
Sc x .
(9.5.5)
2
Обычно в качестве характерной выбирают площадь максимального
поперечного сечения шара плоскостью, перпендикулярной к набегающему
потоку. Тогда из (9.5.5) следует:
Fx 6 πηr0 u
cx
24
.
Re
(9.5.6)
Аналогично можно вычислить коэффициент сопротивления цилиндра
единичной длины и т.д. Следует ещё раз подчеркнуть, что удобство введения
некоторых безразмерных коэффициентов сопротивления заключается в том, что они
являются функциями только безразмерных критериев подобия в любом режиме
движения жидкости как в ламинарном, так и турбулентном. Они могут быть
вычислены аналитически только для некоторых простейших ламинарных
движений. Во всех других случаях для их определения необходимо
обращаться к опыту и тогда их зависимость от безразмерных критериев
подобия устанавливаются на основании опытных данных, представляемых в
виде таблиц, графиков или эмпирических формул.
9.6. АЭРОДИНАМИЧЕСКИЕ ТРУБЫ. БАССЕЙНЫ.
Опыты на моделях проводят для летательных аппаратов в
аэродинамических трубах, а для судов, винтов и других подобных устройств
в бассейнах. Современные аэродинамические трубы - это гигантские
сооружения, потребляющие мощности в десятки тысяч квт. Увеличение
размеров современных аэродинамических труб и соответственно их
механической прочности диктуется следующими обстоятельствами.
Во-первых, если бы было возможно создание аэродинамических труб,
позволяющих обдувать натурные объекты, то, конечно, точность научных
прогнозов значительно увеличилась бы, и тогда моделирование во многих
случаях могло быть полным.
Во-вторых, трудно создать очень маленькую модель, являющуюся в
точности геометрически подобной натуре вплоть до шероховатостей
поверхности модели, заклепок и других тонких, но немаловажных деталей.
В третьих, как мы видно из рассмотренного выше примера, даже для
частичного приближенного подобия необходимо плотность, а следовательно,
151
и давление модельного потока газа увеличить в восемь раз. В этом случае
трудно обеспечить механическую прочность трубы. Если бы можно было
увеличить модель, то не потребовалось бы сильно увеличивать давление в
аэродинамической трубе или вместо воздуха использовать другой
дорогостоящий газ.
Эти три обстоятельства и заставляют идти по линии увеличения
габаритов современных аэродинамических труб, которые в настоящее время
наряду о крупными ускорителями являются уникальными сооружениями
наиболее крупных, технически развитых стран.
В заключение отметим, что вышеуказанные соображения о
динамическом подобии справедливы и для турбулентных потоков, чисто
математического, достаточно точного анализа которых не существует в
настоящее время. В этом случае их моделирование является единственным
способом решения практических задач.
9.7. АНАЛИЗ РАЗМЕРНОСТЕЙ ФИЗИЧЕСКИХ ВЕЛИЧИН
Рассмотрим ещё один метод исследования движений вязкой жидкости,
позволяющий в простейших случаях установить вид функциональной
зависимости характеристик движения от параметров, определяющих
движение, и способствующего, тем самым. рациональной постановке
эксперимента. Этот метод называют методом анализа размерностей
физических величин.
9.7.1. Основные и производные величины
Между всеми физическими величинами существует качественное (сила,
скорость, длина и т.д.) и количественное различие (две различных длины,
скорости и т.д.). Подразумевается, что каждая физическая величина может
быть измерена. Мерой физической величины определяют некоторое число,
которое характеризует её в количественном отношением в сравнении с
аналогичной величиной, принятой за единицу измерения.
Все физические величины можно разбить на две категории - основные
и производные. Величины, для которых единицы измерения вводятся при
помощи эталонов или специальных опытов, называют основными. Величины,
единицы измерения которых зависят от единиц измерения основных величин,
называют производными.
Так, в механике за основные величины принимаются - масса, длина,
время. Их единицы измерения в системе CИ - килограмм (кг), метр (м), секунда
(с). Все остальные производные единицы могут быть выражены через них.
Число основных единиц может быть и больше трёх. Так, в задачах
гидродинамики, связанных с теплообменом, используются градус (0К) и
калория (кал). В магнитной гидродинамике можно ввести ещё некоторые
основные единицы.
152
Для простоты рассмотрим лишь три основные величины: массу, длину
и время. Обозначим их размерность как М, L, и T ,соответственно.
Рассмотрим размерность некоторой производной физической величины
Р, которая может быть выражена через размерность основных величин.
Очевидно, размерность любой произвольной физической величины Р может
быть записана всегда в виде степенного одночлена:
P M m Ll T t
.
(9.7.1)
Здесь m, l, t - показатели размерностей – это некоторые целые или дробные
вещественные числа.
Если увеличить единицу измерения массы в раз, длины - в раз и
времени - в раз, то единица измерения величины Р будет больше
первоначальной в m , l , t раз. Физическую величину нулевой размерности
называют безразмерной величиной. Безразмерная величина инвариантна по
отношению к изменениям масштаба измерения основных величин.
9.7.2. Определяющие параметры
Пусть некоторая физическая величина А является функцией ряда
определяющих параметров
A f a1 , a 2 ,..., a n .
(9.7.2)
Определяющие параметры a1 , a 2 ,..., a n - это некоторые размерные физические
величины., от которых может зависеть величина А , в том числе, и основные
величины. Среди определяющих параметров a1 , a 2 ,..., a n могут быть
параметры с независимыми и зависимыми размерностями. Размерность
определяющего параметра является независимой в данном наборе, если она не
может быть представлена в виде степенного одночлена размерностей
остальных определяющих параметров. Например, размерности L, LT 1 и
ML2T 2 - независимы, а размерности L, LT 1 и LT 2 - зависимы , так как
2
LT 2 LT 1 / LT 2 . Очевидно, что число параметров с независимыми
размерностями не может быть больше числа основных величин (в
рассматриваемом случае оно не может быть больше трёх).
Равенство(9.7.2), выражающее некоторый физический закон, должно
быть справедливо для любых масштабов измерения основных величин.
Следовательно, размерность величины А должна быть равна размерности
функции f.
A f
Рассмотрим сначала простейший пример. Пусть определяющими параметрами являются основные величины, причем их число равно числу
основных величин:
153
a1 M , a 2 L , a3 T
Размерность величины А известна:
A M m Ll T t .
(9.7.3)
Тогда функциональная зависимость величины А должна иметь единственный
вид:
A a1m a 2l a3t K ,
(9.7.4)
так как только таким образом можно соблюсти размерность величины А.
Здесь K - некоторый постоянный безразмерный коэффициент. Очевидно,
что можно поступить аналогично и в том случае, когда в качестве
определяющих параметров выступают три параметра, имеющие
произвольные, но зависимые размерности. В этом случае уравнение
размерностей имеет вид:
A a1 a 2 a3
(9.7.5)
Снова, приравнивая показатели трёх основных величин правой и левой части
уравнения (9.7.5), можно из трёх уравнений определить неизвестные
показатели , , . Тогда функциональная зависимость величины А от
определяющих параметров a1 , a 2 и a3 будет иметь вид:
A a1 a 2 a3
(9.7.6)
9.7.3. Период колебаний маятника
Определим функциональную зависимость периода колебаний
математического маятника от определяющих параметров. Предполагается, что
определяющими параметрами в данном случае являются l - длина маятника,
m – его масса и g -ускорение силы тяжести.
Поэтому функциональную зависимость
периода колебаний маятника от трёх
определяющих
параметров
с
их
независимыми
размерностями
можно
l
записать в виде:
f a1 , a 2 , a 3 , a 2 l , a1 m , a 3 g ,
m M , l M , g LT 2
h
Следуя формуле (9.7.5) имеем
m
m l g M 0 L0T M L LT 2
Рис. 9.1
Приравнивая показатели степени при одинаковых размерностях M, L, и T
имеем соответственно:-
154
0,
Из полученных уравнений следует:
0,
1 2 .
1
1
0, , .
2
2
Тогда функциональная искомая зависимость периода колебаний маятника от
определяющих параметров согласно уравнению (9.7.6) имеет вид:
K
l
g
(9.7.7)
Безразмерная постоянная K в (9.7.7), конечно, не может быть определена этим
методом. Аналитическое решение задачи дает K 2 .
9.7.4. Сила сопротивления шара
Если число определяющих параметров больше трёх, то можно выбрать
из них три с независимыми размерностями. Тогда размерности остальных
определяющих параметров могут быть выражены через независимые
размерности выбранных трёх параметров в виде степенных одночленов.
Ясно, что в этом случае система уравнений для показателей размерностей
становится неопределённой, а, следовательно, исключена возможность
установления однозначной искомой функции вида (9.7.6). Очевидно, что в
случае трёх определяющих параметров с независимыми размерностями из
них невозможно организовать ни одной безразмерной комбинации.
Если число определяющих параметров равно четырём, причем, из них
только три имеют независимые размерности, то нетрудно видеть, что из
имеющихся четырёх параметров можно составить лишь одну одночленную
степенную комбинацию, не имеющую размерности. Если имеется пять
определяющее параметров, то таких безразмерных комбинаций можно
составить только две, если предыдущая безразмерная комбинация
рассматривается как некоторый четвертый определяющий параметр и т.д. В
этом случае функциональная зависимость физической величины (9.7.5)
может быть записана в следующем виде:
A a1 a2 a3 ...an f 1 , 2 ,... n 3 K
(9.7.7)
Здесь произвольная функция f от независимых безразмерных комбинаций
1, 2 ,... n 3 остается неопределенной. Показатели степеней должны
выбираться при помощи каких-то дополнительных соображений. Сказанное
выше лучше всего иллюстрировать примером.
Найдём функциональную зависимость силы сопротивления обтекаемого
вязкой несжимаемой жидкостью шара от определяющих параметров.
Очевидно, определяющими параметрами будут: -плотность жидкости, скорость
набегающего
потока,
r0 -радиус
шара,
-коэффициент
155
кинематическая вязкость. Запишем размерности определяемой величины и
параметров
F MLT 2 , ML3 , LT 1 , r0 L , L2 T 1 .
(9.7.8)
В данной задаче число определяющих параметров равно четырём. Из
них первые три могут быть приняты за основные, т.к. они имеют
независимые размерности. Найдем безразмерную комбинацию параметров.
Очевидно, для этого достаточно составить следующее уравнение
размерностей:
[ A]0 ( ML3 ) ( LT 1 ) L ( L2T 1 ) .
(9.7.9)
Приравнивая в этом уравнении степени одинаковых основных величин,
получим уравнения для показателей степени:
0 ,
0 3 2 ,
0 .
Решение системы уравнений имеет вид:
0,
.
Следовательно, показатели , , могут быть любыми одинаковыми целыми
или дробными вещественными числами. Безразмерная комбинация
параметров имеет вид:
r
0 Re f Re .
v
В последней формуле показатель степени остается неопределённым,
поэтому можно заменить степенную формулу некоторой функцией от числа
Рейнольдса.
Тогда общий вид формулы для силы сопротивления шара будет иметь
вид:
F ρ α υ β r0γ v ε K f Re .
(9.7.10)
Однако, поскольку, приравнивая показатели степеней правой и левой части
уравнения размерности (9.7.2), получено лишь три уравнения для четырёх
показателей, то задача определения показателей становится неопределенной.
Можно их определить лишь в двух предельных случаях движения жидкости.
Рассмотрим сначала случай движения при малых числах Рейнольдса.
Движение жидкости при малых числах Рейнольдса можно рассматривать как
движение жидкости, обладающей очень большой вязкостью. В этом случае,
очевидно, плотность жидкости не должна играть существенной роли и её
можно исключить из числа определяющих параметров. Тогда
определяющими параметрами будут , r0 , , имеющие независимые
размерности:
F MLT 2 , υ LT 1 , r0 L , ML1T 1 .
156
Уравнение размерностей имеет вид:
MLT 2 LT 1 L ML1T 1
(9.7.11)
Естественно, что никаких безразмерных комбинаций из этих трёх параметров
составить нельзя. Для нахождения показателей степеней имеем уравнения:
1
1
2 .
Из этой системы уравнений находим: 1 , 1 , 1 .
Следовательно, функциональная зависимость (9.7.3) имеет вид:
F r0 ηυ K .
(9.7.12)
Таким образом, получена формула Стокса для силы сопротивления
шара с неопределенным безразмерным численным коэффициентом K.
Аналитическое решение, как показано ранее, дает K 6 .
Рассмотрим другой предельный случай обтекания шара - обтекание его
при очень больших числах Рейнольдса ( Re ). Движение жидкости при
очень больших числах Рейнольдса можно рассматривать как движение
маловязкой жидкости. Тогда из определяющих параметров можно исключить
коэффициент вязкости . Размерности остальных определяющих параметров
ρ, , r0 независимы и из них нельзя образовать некоторую безразмерную
комбинацию. Уравнение размерностей имеет вид
MLT 2 ML3 LT 1 L .
(9.7.13)
Для показателей степени имеем уравнения:
1 ,
1 3 ,
2 .
Решение полученной системы уравнений даёт: 1 , 2 , 2 . Тогда сила
сопротивления зависит от определяющих параметров следующим образом:
F ρ υ r02 K .
(9.7.14)
Таким образом, сила сопротивления шара при больших числах
Рейнольдса (в том числе, и при турбулентном движении) должна быть
пропорциональна квадрату скорости, а не первой степени, как в предыдущем
случае ( Re ). Единственный неизвестный безразмерный коэффициент K
может быть определен из одного единственного опыта.
При промежуточных числах Рейнольдса метод размерностей не может
однозначно определить функциональную зависимость силы сопротивления
от всех определяющих параметров. Однако, и в этом случае метод
размерностей может быть весьма полезен. Действительно при любых числах
Рейнольдса уравнение размерностей имеет вид:
MLT 2 ML3 LT 1 L L2T 1
(9.7.15)
Система уравнений для нахождения показателей степеней содержит три уравнения
для нахождения четырех неизвестных:
1 ,
157
1 3 2 ,
2 .
Решение системы неоднозначно. Если положить 1 , то имеем:
1,
1,
1,
1 .
Тогда функциональная зависимость силы сопротивления от определяющих
параметров имеет вид:
F ρυr0 vf Re K1 .
(9.7.16)
Если положить 2 , то 1 , 0 , 2 и аналогичное выражение нужно
записать в следующем виде:
F ρυ 2 r02 vf Re K 2 .
(9.7.17)
К сожалению, теория размерностей не может указать, какая из этих
формул является правильной. Но во всяком случае имеем дело в данном
случае лишь с двумя функциональными зависимостями, и дело
экспериментатора определить неизвестные коэффициенты, функциональную
зависимость от безразмерных комбинаций определяющих параметров, а
также пределы применимости той или иной формулы.
Это обстоятельство значительно сокращает объём необходимой экспериментальной работы и является направляющей идеей для рационального
планирования эксперимента.
9.7.5. Выбор определяющих параметров и основных величин
Если известна математическая постановка задачи, то выбор
определяющих параметров следует из уравнений движения и граничных
условий. В этом случае определяющие параметры - это все данные, которые
необходимо задавать для вычисления искомых физических величин. Если же
уравнения, описывающие данное явление, неизвестны, то остается, полагаясь
на физическую интуицию и предварительные экспериментальные данные,
испытать несколько гипотез о предполагаемой системе определяющих
параметров.
Здесь были рассмотрены лишь три основных физических величины:
масса, длина и время. Поэтому для нахождения показателей степеней имелось
всегда только три уравнения и, если число определяющих параметров было
больше трёх, это ставило исследователя всегда в затруднительное, хотя и не
всегда безвыходное положение. Введение некоторых дополнительных
основных единиц измерения могло бы помочь в некоторых случаях решать
задачу однозначно, хотя вряд ли это будет полезно в методологическом
отношении.
В заключение отметим, что полезность теории размерности
заключается: во-первых, в определении точного вида функциональной
зависимости (если число независимых определяющих параметров меньше или
равно числу основных величин) и, во-вторых, в определении функциональных
158
альтернативных зависимостей (если число определяющих параметров
больше, чем число основных величин). Тем самым, она помогает, не решая
уравнений движения, правильно установить вид функциональных
зависимостей и целенаправленно поставить эксперимент, значительно сокращая
объём экспериментальной работы.
10.ТУРБУЛЕНТНОСТЬ
В теме 8 рассмотрено несколько точных решений уравнений движения
вязкой жидкости. Эти уравнения удавалось получить в том случае, когда из
уравнений по тем или иным причинам исключалось нелинейное конвективное
слагаемое
существуют
точные
решения
(υ )υ 0 . По-видимому,
гидродинамических уравнений и с нелинейным конвективным слагаемым
(например, задача Стокса).
Однако даже самые точные решения могут не описывать реальных
движений среды. Для того чтобы точные решения полностью описывали
реальные движения, необходимо, чтобы эти решения были устойчивыми по
отношению к бесконечно малым возмущениям. Если бесконечно малое
возмущение, возникшее случайно, будет в дальнейшем расти с течением
времени, то такое движение будет абсолютно неустойчивым.
Таким образом, изучение движений реальных жидкостей включает в
себя не только проблему нахождения точных решений уравнений движения, но
и проблему исследования устойчивости этих решений к бесконечно малым
возмущениям, а также проблему изучения движений жидкости после потери
устойчивости.
До сих пор изучалась лишь первая часть проблемы, т.е. получение
точных решений гидродинамических уравнений. Рассмотрим её вторую часть проблему устойчивости полученных точных решений к бесконечно малым
возмущениям.
10.1. УСТОЙЧИВОСТЬ СТАЦИОНАРНОГО ДВИЖЕНИЯ ЖИДКОСТИ
Рассмотрим лишь принципиальную постановку проблемы устойчивости
стационарного движения неcжимаемой жидкости. Пусть некоторое движение
среды описывается стационарным уравнением Навье-Стокса в отсутствии
внешних сил. Пусть υ0 υ0 ( x, y, z) и P0 P0 ( x, y, z) есть точное решение этого
стационарного уравнения. Тогда при подстановке решения в уравнение НавьеСтокса оно удовлетворяется тождественно, т.e.
1
( υ0 ) υ0
P0 ν υ0 , divυ0 0 .
(10.1.1)
ρ
Пусть на полученное точное решение наложено бесконечно малое
возмущение
υ
υ0
υ,
P
P0
P,
υ
υ0 ,
P
P0 .
(10.1.2)
160
Это означает, что в любой момент времени имеют место случайные пульсации
скорости движения и давления около их стационарных значений. Тогда,
очевидно, возмущенное движение должно быть и нестационарным и должно
удовлетворять нестационарному уравнению Навье-Стокса
υ
(υ )υ
t
1
P ν υ,
ρ
div υ
0.
Подставляя (10.2) в это нестационарное уравнение движения, получим:
υ0
t
υ
t
(υ 0
υ ) (υ 0
υ)
1
( P0
ρ
P ) ν (υ 0
υ ).
Пренебрегая членами второго порядка малости в конвективном слагаемом и
учитывая, что υ0 и P0 должны удовлетворять стационарному уравнению НавьеСтокса (10.1.1), получим:
υ
t
( υ ) υ0
1
P
ρ
( υ0 ) υ
ν υ,
divυ
0.
(10.1.3)
Очевидно, добавки υ к скорости, как и P к давлению должны равняться нулю
на ограничивающих движение неподвижных поверхностях из-за прилипания
жидкости к стенке и отсутствия пульсации давления на ней. Таким образом, для
нахождения υ имеется линейное дифференциальное уравнение 2-го порядка с
параметрами, зависящими только от координат и времени.
Общее решение такого уравнения имеет вид:
υ (r )
f k (r )e
iωk t
.
(10.1.4)
k 1
Здесь частоты ωk в общем случаи являются комплексными ωk αk iβk и не
произвольны, а определяются решением уравнения Навье-Стокса, условием
несжимаемости и граничными условиями.
Очевидно, что, если среди спектра частот ωk окажется хотя бы одна
частота, комплексная часть которой положительна ( k 0) , то возмущение υ
будет с течением времени неограниченно расти, и первоначальное
стационарное движение будет абсолютно неустойчиво. Для того чтобы
стационарное движение было устойчивым к бесконечно малым возмущениям,
а, следовательно, и могло существовать в природе, необходимо, чтобы мнимая
часть всех частот ωk была бы отрицательной. Тогда бесконечно малые
случайные возмущения, возникающие в движущейся жидкости, с течением
времени будут затухать.
При исследовании устойчивости плоского движения Пуазейля решение
(10.4) ведёт себя следующим образом. При заданной геометрии с увеличением
161
скорости движения, наконец, достигается такая скорость или число Рейнольдса,
при котором в спектре частот k появляется одна частота с k 0 . Это число
Рейнольдса определяет границу устойчивости движения и может быть названо
критическим числом Рейнольдса - Re кр . При дальнейшем увеличении скорости
(числа Рейнольдса) появляется всё больше и больше частот, мнимая часть
которых положительна ( k 0) , что указывает на всё увеличивающуюся
неустойчивость движения.
Такое описание проблемы устойчивости представляет собой общую
схему исследования на устойчивость стационарных движений вязкой
несжимаемой среды. Однако в настоящее время по такой схеме исследована
устойчивость лишь единственного стационарного движения, для которого
результаты исследования удовлетворительно совпадают с опытными данными это устойчивость стационарного движения вязкой несжимаемой среды между
двумя вращающимися коаксиальными цилиндрами. Даже для плоской задачи
Пуазейля теоретическое значение Re кр значительно отличается от
экспериментального.
Неудача объясняется, по-видимому, тем обстоятельством, что в опытах
имеют дело всегда с каналами конечной длины, тогда как теория рассматривает
бесконечно длинные каналы. Влияние концов канала на устойчивость движения
среды в нём, по-видимому, является существенным.
10.2. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ СРЕДЫ МЕЖДУ ДВУМЯ
ВРАЩАЮЩИМИСЯ КОАКСИАЛЬНЫМИ ЦИЛИНДРАМИ
Рассмотрим качественно проблему устойчивости движения вязкой
несжимаемой среды между двумя вращающимися коаксиальными цилиндрами
с радиусами R1 и R2 (Релей, 1916 г.)
Идея исследования заключается в следующем. Если какую-либо
индивидуальную частицу среды мысленно сдвинуть с её стационарной
траектории в некоторое соседнее положение и если при этом возникают
силы, стремящиеся возвратить её в исходное положение, то такое движение
считается устойчивым. В противоположном случае, когда частица стремится
уйти с установившейся траектории ещё дальше, движение считается
неустойчивым.
162
R
R11
rr0
0
Как было показано в п.8.3.5, распределение скоростей частиц среды
между вращающимися цилиндрами не зависит от
её вязкости. Поэтому можно рассматривать такое
движение как движение идеальной среды. Пусть
для определенности R2 R1 . Рассмотрим силы,
R
R22
действующие на некоторую индивидуальную
F
частицу, вращающуюся по окружности с
FЦЦ
FPP F
радиусом r0 . В стационарном состоянии на
rr
частицу действует центробежная сила Fц,
стремящаяся сдвинуть частицу вдоль радиуса
дальше от оси вращения, и равная ей, но
,
1, 2
Fр ,
противоположно
направленная
сила
1
2
обусловленная градиентом давления в зазоре
между цилиндрами. В стационарном движении
обе силы равны и противоположны, и, следовательно, частица вращается по
некоторой стационарной траектории - окружности с радиусом r0 . Центробежная сила Fц , действующая на частицу, и равная ей, но противоположно
направленная сила градиента давлений Fр могут быть выражены через момент
Рис.
Рис. 10.1
10.1
количества движения частицы в виде
M0
m
0 r0
Fр (r0 )
m
2
0 r0 ,
Fц (r0 )
Fц
m
m 2
r0
mr03
r
mr03
2
0 0
m
2
0 0
r,
M 02
.
mr03
Теперь мысленно можно сдвинуть частицу вдоль радиуса в некоторое
новое положение на расстоянии r от оси движения (рис. 10.1). Так как
рассматривается движение идеальной жидкости, то при таком перемещении
частицы должен сохраняться её момент количества движения. Следовательно,
частица, придя в новое положение, будет обладать центробежной силой, равной
Fц (r )
M 02
.
mr 3
Однако, в стационарном состоянии на расстоянии r от оси вращения действует
определяемая градиентом давления сила, возвращающая её к оси вращения, и
равная ей центробежная сила, т.е.
163
Fц (r )
M2
Fp ( r )
mr 3
.
Тогда можно предположить, что движение будет устойчивым, если
Fр ( r )
Fр ( r ) ,
M2
M 02
,
mr 3
mr
3
Fц (r )
M2
Fц (r ) ,
M 02
0.
Полагая смещение частицы малым, момент количества движения можно
разложить в ряд и, ограничиваясь членами первого порядка малости по
M / r r r0 r . После подстановки данного
r r r0 , получим M M 0
момента в четвертое неравенство условие устойчивости принимает общий вид:
(M
M0)
M
r
r 0,
r 0,
M
r
M
r r0
0.
(10.2.1)
r r0
Точное решение стационарной задачи (п.8.3.5.) даёт для скорости частиц
среды в зазоре следующую формулу:
ar
b
,
r
M
m r m(ar 2
Подставляя значения M и M
m(ar 2
M
r
b),
2amr0 . , .
r r0
r в условие устойчивости (10.2.1), получим:
b)2amr 0,
2m 2 ar 3 a
b
r2
0.
(10.2.2)
/ r a b / r 2 , поэтому условие
Но скорость углового вращения равна
устойчивости принимает вид:
2m 2 ar 3ω 0 ,
aω 0 .
Подставляя постоянную a из точного решения (см. п.8.3.5.), имеем:
2
2 R2
R22
2
1 R1
R12
0.
(10.2.3)
Условие (10.2.3) представляет собой условие устойчивого движения
среды между двумя вращающимися коаксиальными цилиндрами. Очевидно, для
рассматриваемого случая, когда R2 > R1, движение будет устойчивым, если в
любой точке зазора выполняется неравенство
(
2
2 R2
2
1 R1 )
Рассмотрим некоторые частные случаи.
0.
(10.2.4)
164
1. Цилиндры вращаются в разные стороны, т. е. 1 и 2 имеют разные
знаки. Внутри зазора скорость вращения среды
изменяет знак,
следовательно, неравенство (10.2.4) не может быть выполнено в любой точке
зазора. Поэтому движение в этом случае неустойчиво при любых значениях 1
и 2.
2.Цилиндры вращаются в одну и ту же сторону. Если это направление
вращения цилиндров считать положительным, то
и,
2 0
1 0,
0 в любой точке зазора. Поэтому условие устойчивости в
следовательно,
этом случае имеет вид:
2
2 R2
2
1 R1 ,
1
2
R22
.
R12
(10.2.5)
3. Вращается только внешний цилиндр, т.е. 1 0 , 2 0 , тогда 2 0 ,
0 и, следовательно, движение устойчиво при любых скоростях вращения
внешнего цилиндра.
4. Вращается только внутренний цилиндр, т.е. 2 0 . Из (10.2.3)
2
0 , и, следовательно, движение
0 . При
следует, что
1 R1
1 0
неустойчиво при любых скоростях вращения внутреннего цилиндра.
Все сказанное выше
можно
изобразить
1
графически (рис.10.2).
Неустойчивое
Видно,
что
график
2 2
2 2
1 R1
2 R2
движение
удовлетворяет
всем
2 2
рассмотренным
выше
2
2 R2
1
Однако,
2 случаям.
R12
категоричные
утвержРис. 10.2
дения
в
некоторых
случаях с физической точки зрения кажутся сомнительными. Например,
утверждение, что движение будет всегда неустойчивым, если вращается только
внутренний цилиндр, вряд ли справедливо при очень медленных вращениях
внутреннего цилиндра.
1
Точное решение с учётом
вязкости среды, полученное
Область
неустойчивого
движения
Тэйлором с использованием
общего метода исследования
проблемы, который описан в
2 2
2 2
2
начале раздела, приводит к
1 R1
2 R2
кр
резульатам, изображенным на
Рис.10.3
рис.
10.3.
Исследование
165
удалось провести до конца только в случае малых зазоров при выполнении
следующего условия:
h
R2
R1
R
R2
R1
2
.
На рис. 10.3 видно, что действительно, если вращается только
внутренний цилиндр ( ω1 0 ), то существует некоторая критическая скорость
его вращения 1кр . Если скорость вращения внутреннего цилиндра меньше
1кр ,
то движение жидкости в зазоре остается устойчивым, как и подсказывает
физическая интуиция. Точное решение для
41,3
1кр
h hR
1кр
даёт следующее выражение:
.
Как видно из предыдущего рассмотрения, оригинальный и простой метод Релея даёт правильную оценку устойчивости некоторых случаев движения в
зазоре. Действительно, он правильно определяет асимптоту точного решения
2
2
1 R1
2 R2 и верно предсказывает устойчивость движения в том случае, если
вращается только внешний цилиндр. Можно, по-видимому, сказать, что он даёт
необходимые условия устойчивости, но недостаточные.
Теория Тейлора обнаруживает поразительное совпадение с опытом и
является классическим примером исследования устойчивости движения вязкой
несжимаемой жидкости. Как уже указывалось, аналогичное исследование
устойчивости движения жидкости в каналах не привело к удовлетворительным
результатам, хотя этой проблемой занимались такие теоретики с мировыми
именами как Зоммерфельд, Гейзенберг, Хопф.
После потери устойчивости в зазоре образуются локальные ячеистые
вихревые движения, которые затем, по мере углубления в область
неустойчивого движения, переходят в беспорядочное турбулентное движение.
10.3. ОСОБЕННОСТИ ТУРБУЛЕНТНОГО ДВИЖЕНИЯ
Перейдём к изучению движения среды после потери устойчивости
движения. Рассмотрим движение среды в круглой цилиндрической трубе.
Рейнольдс впервые (1883г.) обратил внимание на то, что в трубе могут
существовать две резко отличающиеся формы движения жидкости. Опыты
Рейнольдса заключались в следующем. В трубку с движущейся жидкостью
вводилась тонкая трубочка, из которой в жидкость поступало некоторое
красящее вещество (рис.10.4). При малых скоростях движения жидкости в
трубке краска распространялась вдоль трубы в виде тонкой прямолинейной
166
нити с красящим веществом,
простирающейся от носика
а)
трубки
до
её
конца
(рис.10.4а.). При постепенном
увеличении
скорости
б)
движения в трубке, наконец,
достигается такая скорость,
Рис.10.4.
при
которой
струйка
красящего вещества начинает произвольно изгибаться, и затем размываться,
окрашивая равномерно всю жидкость, движущуюся в трубке. Очевидно, до
этого момента все частицы жидкости в трубе двигались параллельно оси трубы,
и движение имело слоистый характер. Такое движение Рейнольдс назвал
ламинарным, т.е. слоистым. Все точные решения уравнения Навье-Стокса
получены именно для такого ламинарного движения. После потери
устойчивости частицы жидкости, очевидно, приобретают некоторые
поперечные составляющие скорости движения, в результате чего и происходит
равномерное окрашивание поля течения. Такое движение Томсон назвал
турбулентным, т.е. вихревым.
Характерные особенности турбулентного движения в трубе:
1. Наличие поперечных составляющих скорости движения частиц
жидкости.
2. Если ламинарное движение может быть как установившимся, так и
неустановившимся (нестационарным), то турбулентное движение всегда
неустановившееся, т.к. мгновенные скорости частиц жидкости в данной точке
пространства, занятого жидкостью, всё время изменяются как по направлению,
так и по величине.
3. Турбулентное движение можно считать квазипериодическим, поскольку
через некоторый неопределенный промежуток времени в данной точке
пространства скорость снова может принять прежнее мгновенное значение.
Иногда говорят, что турбулентное движение среды в отличие от
ламинарного является вихревым. Турбулентное движение среды действительно
всегда является вихревым. Но и большинство ламинарных течений также
являются вихревыми, т.е. движениями, для которых ротор скорости в каждой
точке пространства, занятого движущейся средой, не равен нулю (см п 7.4)/
Рейнольдс, проводя опыты с различными жидкостями в трубах различных
диаметров, установил, что переход от ламинарного движения к турбулентному
d
наступает тогда, когда безразмерная комбинация величин
достигает
некоторой определенной величины. Эту безразмерную комбинацию называют
167
числом Рейнольдса. Следовательно, потеря устойчивости установившегося
ламинарного движения жидкости в трубе, а, следовательно, переход
ламинарного движения в турбулентное происходит всегда при одном и том же
числе Рейнольдса, которое называют критическим числом Рейнольдса - Re кр .
Поэтому число Рейнольдса игpaeт важнейшую роль не только в
динамическом подобии потоков вязкой несжимаемой жидкости, но и является
критерием устойчивости их движения. Если не принимать специальных мер к
сглаживанию условий входа жидкости в трубу, а также к специальному
Re кр 2300 для
устранению шероховатостей стенок трубы, то
цилиндрической трубы. Поэтому, в случае, если Re Re кр , случайные
возмущения, возникающие в потоке, будут затухать вниз по потоку, и движение
жидкости сохраняет свой ламинарный характер. Если же Re Re кр , то
возмущения, не передаваясь вверх по потоку, разрастаются вниз по течению
жидкости. Вообще сглаживанием условий входа в трубу и устранением
шероховатостей стенок трубы можно существенно затянуть переход
ламинарного течения в турбулентный. В таких случаях можно наблюдать
ламинарное движение при Re 50000 и более. Этот факт подтверждает то
обстоятельство, что, по-видимому, истинной неустойчивости движения среды
не существует, a наблюдаемая неустойчивость определяется размерами
возмущений. Опыт показывает, что Re кр 2300 не является универсальным и
оно характерно только для круглой цилиндрической трубы. Так, в
расширяющейся трубе Re кр 2300, в сужающейся трубе Re кр 2300. При
обтекании цилиндра Re кр
34 . То есть, для каждой геометрии течения имеется
свое критическое число Рейнольдса.
10.4. УРАВНЕНИЯ РЕЙНОЛЬДСА
Свойства турбулентного движения очень сложны и известны главным
образом из экспериментов. Опыты же показывают, что при установившемся
турбулентном движении скорость в данной точке пространства всё время
изменяется как по величине, так и по направлению. Так же изменяется и
давление. Если измерить изменение мгновенной продольной компоненты
скорости в данной точке трубы с течением времени высокочувствительным
прибором, то можно получить график типа представленного на рис.10.5.
Из рисунка видно, что при установившемся турбулентном движении
компонента скорости х вдоль оси х трубы пульсирует около некоторого
среднего значения x , определяющего расход среды в трубе. Если бы
использовать более чувствительный и менее инерционный прибор, то
обнаружили бы, что каждый более или менее прямолинейный участок кривой
168
рис.10.5 на самом деле представляет собой некоторую ломаную
зигзагообразную линию. Очевидно, поперечная составляющая скорости y
пульсирует около среднего значения, равного нулю.
Среднее значение некоторой компоненты скорости и давления могут быть
получены следующим образом:
1T
i dt ,
T0
i
P
1T
Pdt .
T0
Здесь T - промежуток времени, достаточно большой по сравнению с
характерным временем основных пульсаций скорости, но в то же время
достаточно малый по сравнению со временем релаксации нестационарного
движения (осреднённое движение
x
может быть и нестационарным).
Начало
отсчёта
промежутка
x
времени T произвольно и может
быть принято за нуль. Тогда
мгновенное значение скорости или
x
давления в любой момент времени
t
можно представить следующим
образом:
Т
υi
Рис.10.5.
Здесь
i
υi
υi ,
P
P
P ,
и P - пульсационная составляющая скорости и давления. Будем
полагать, что турбулентное движение может быть описано точными решениями
уравнения Навье-Стокса для осреднённых величин.
Проведём осреднение каждого слагаемого уравнения движения по
следующим правилам осреднения. Пусть f f ( x, y, z) есть некоторая
характеристика движения, мгновенное значение которой в данной точке
пространства можно в любой момент времени представить в виде
f
f
f ,
1T
fdt . ,
T0
f
.
Предполагается, что T выбрано так, что проведённое осреднение даёт величину,
при повторном осреднении неизменяющуюся. По определению f 0 .
1. Среднее значение суммы величин равно сумме средних:
f1
f2
f1
f2.
2. Среднее значение произведения двух величин, из которых лишь одна
испытывает пульсации, определяется произведением средних:
169
f1 f 2
f1 f 2 ,
f1 f 2
f1 f 2
0.,
.
3. Среднее значение произведения двух пульсирующих величин не равно
произведению средних:
f1 f 2
f1 f 2
f1 f 2 ,
f1 f 2
0.
4. Среднее значение производной от пульсирующей характеристики
определяется производной от её среднего значения:
f
t
f
,
t
f
xi
f
.,
xi
.
Следует заметить, что невозможно осреднить все характеристики
движения одинаковым образом, не нарушая вида основных физических законов
сохранения. Например, если в уравнении состояния идеального газа
одинаковым образом осреднить P,
и T , то в соответствии с
вышеприведенными правилами получим:
P
TR
TR
R
.
M
T
Но тогда закон Менделеева-Клапейрона не будет справедлив для средних
величин, что, по-видимому, физически некорректно. Поэтому в различных
теориях турбулентности применяют различные правила для осреднения
различных величин, характеризующих движение среды.
По вышеприведенным правилам проведем осреднение уравнений НавьеСтокса для несжимаемой среды:
υi
t
υk
υi
xk
υi
,
xk2
υk
xk
2
1 P
ρ xi
ν
0.
Осреднение каждого слагаемого в этих уравнениях даёт:
υi
t
υi
,
t
υk
xk
i
k
xk
υk
,
xk
1 P
ρ xi
1 P
,
ρ xi
υ
ν 2i
xk
υi
.
xk2
2
2
ν
k
xk
i k
i
xk
i
xk
i k
xk
i k
xk
i k
k
xk
xk
i k
.
Осреднённые уравнения Навье-Стокса имеют вид:
υi
t
υk
υi
xk
1 P
ρ xi
υi
xk2
2
ν
xk
υi υk ,
υk
xk
0.
Первые два слагаемых в правой части (10.4.2) можно записать в виде:
(10.4.2)
170
1 P
ρ xi
υi
xk2
2
ν
1 σ ik
,
ρ xk
σ ik
P δik
σ~ik
P δik
η
υi
xk
υk
, (10.4.3)
xi
Теперь осредненное уравнение Навье-Стокса (10.4.1) с учетом (10.4.3) можно
представить в следующем виде:
υi
t
υk
υi
xk
1
σ ik
ρ xk
υk
xk
ρ υi υk ,
0.
(10.4.4)
Из последнего уравнения видно, что уравнения движения для
осредненных величин имеют тот же самый вид, что и для мгновенных, но при
этом возникает слагаемое
i k , учитывающее дополнительные напряжения.
Это слагаемое называют тензором турбулентных напряжений, который
является симметричным тензором, и его обозначают:
Tik
i k
.
(10.4.5)
При турбулентном движении общий тензор напряжений можно записать в
виде:
ik
P
ik
~
ik
Tik .
(10.4.6)
Уравнения (10.4.2) называют уравнениями Рейнольдса для осредненного
(турбулентного) движения вязкой несжимаемой среды.
Происхождение дополнительных напряжений при турбулентном
движении физически очевидно. Вязкие напряжений возникают вследствие
направленного переноса импульса молекулами из слоя среды, движущегося с
бόльшей макроскопической скоростью, к соседнему, движущемуся с меньшей
скоростью. При турбулентном движении же перенос импульса от одного слоя к
другому, соседнему происходит не молекулами, а малыми макроскопическими
частицами среды, движущимися с макроскопическими пульсационными
скоростями. Поэтому по аналогии с обычной вязкой средой турбулентно
движущуюся
рассматривают
как
среду,
обладающую
некоторой
дополнительной турбулентной вязкостью, и записывают по аналогии с
тензором ~ik вязких напряжений тензор Tik турбулентных напряжений в
осреднённом виде:
σ~ik
η
υi
xk
υk k
,
xi
Tik
ηT
υi
xk
υk
,
xi
(10.4.7)
В этом случае центр тяжести исследования турбулентного движения
переносится на изучение турбулентной вязкости T , и уравнения Рейнольдса
принимает форму:
171
υi
t
υk
υi
xk
1 P
ρ xi
2
υ
1
(η ηт ) 2i ,
ρ
xk
υk
xk
0.
(10.4. 8)
Однако упрощение проблемы, очевидно, только кажущееся, т.к.
коэффициент турбулентной вязкости ηТ в отличие от коэффициента
динамической вязкости
η
не является достаточно консервативным
параметром, характеризующим только саму среду, а зависит от свойств
движения, в частности, от числа Рейнольдса. Причем, при турбулентном
движении коэффициент турбулентной вязкости значительно больше
коэффициента динамической вязкости ηТ >> η.
Таким образом, для определения осредненных характеристик
турбулентного движения несжимаемой жидкости имеется четыре уравнения
(10.4.6). Однако к числу неизвестных добавилось еще шесть неизвестных
компонент симметричного тензора турбулентных напряжений. Для замыкания
системы уравнений имеется два пути. Необходимо или каким-то образом
выразить компоненты тензора турбулентных напряжений через осредненные
скорости и их производные (как предлагают в теории Прандтль и Карман) или
дополнить систему уравнений какими-либо уравнениями, устанавливающими
связь между средними и пульсационными скоростями или их моментами
(Фридман). К сожалению, ни тот, ни другой путь сегодня не привел к созданию
удовлетворительной количественной теории турбулентного движения.
10.5. ТЕОРИЯ ПРАНДТЛЯ
Теория турбулентного движения Прандтля основывается на аналогии с
молекулярным движением в газе. Рассмотрим плоское турбулентное движение
несжимаемой жидкости вдоль бесконечной стенки (рис.10.6). Выберем два слоя,
параллельных оси x. Среднюю скорость движения частиц жидкости в них
обозначим через u и u+du. Будем считать, что скорость u определяется
средней пульсационной скоростью υx , которая является функцией y, а средняя
пульсационная составляющая скорости в у-направлении равна нулю, т.е.
u
υx
f ( y) ,
υy
0.
Пусть расстояние между слоями равно l . Прандтль по аналогии с
кинетической теорией газов предполагает, что l - это некоторый аналог средней
длины свободного пробега молекул в газе. На этом расстоянии частицы
жидкости могут переходить из слоя в слой лишь благодаря своим
пульсационным скоростям y . Причем, импульсы таких частиц сохраняются
при прохождении длины l . Частица жидкости, попадающая из нижнего слоя в
верхний, имеет среднюю скорость x u , отличающуюся от средней скорости
верхнего слоя на du. Очевидно, "сталкиваясь" в верхнем слое с его частицами,
172
скорость последних так же может изменяться на величину порядка du. Это
изменение создает пульсацию x порядка du . Таким образом, имеем:
du
υx du l
, l dy . (10.5.1 13)
y
dy
u + du
Предполагая турбулентность изотропной (по
крайней мере, вдали от стенки), получим:
l′
du
u
υx υ y , υ y l
.
dy
Тогда тензор турбулентных напряжений
x
можно определить:
Рис. 10.6
2
2
du
du
2
Txy ρ υx υ y ρ k l
ρ l2
, k l
l.
(10.5.2)
dy
dy
Величину l называют длиной пути перемешивания, которая может зависеть от y.
Далее Прандтль предполагает, что длина пути перемешивания прямо
пропорциональна расстоянию от стенки:
2
l
y.
(10.5.3 14)
Здесь
- некоторый безразмерный коэффициент пропорциональности.
Предположение (10.5.3 14) можно подкрепить рассуждением о том, что стенка
препятствует развитию поперечных пульсационных скоростей и, очевидно, на
самой стенке длина пути перемешивания или пропорциональная ей "длина
свободного пробега" должна быть равна нулю. Как и при ламинарном режиме
течения, также предполагается, что тензор турбулентных напряжений не
изменяется вдоль направления, перпендикулярного стенки и равен его значению
0 на стенке, т.е.
Txy
const .
0
Для определения средней скорости u, используя (10.5.2,3), получаем уравнение:
τ0
ρ κ
2
y
2
du
dy
2
du
dy
,
1 τ0 1
.
κ ρ y
Решение этого уравнения имеет вид:
u
1
0
ln y
c.
(10.5.4 15)
Таким образом, из (10.5.4) следует, что средняя скорость турбулентного
движения вязкой несжимаемой жидкости вдоль бесконечной стенки
распределена по логарифмическому закону.
173
1/ 2
Величина 0
в (10.5.4 15) имеет размерность скорости и её обычно
обозначают через υ . Формулу (10.5.4 15) удобно записать в безразмерной виде.
Для этого составим безразмерную комбинацию из величин (y, , ). Такой
комбинацией является выражение y υ / ν . Тогда формулу (10.4. 15) можно
записать для безразмерной скорости u в виде:
u
υ
1 yυ
ln
κ
ν
c,
u
1
ln y .
κ
(10.5.5 16)
Очевидно, что и при турбулентном движении жидкости на поверхности
обтекаемого тела вследствие условий прилипания всегда существует тонкий
слой, в котором жидкость движется ламинарно. Этот слой называют вязким
подслоем. Ясно, что формула (10.5.4 16) справедлива лишь вне вязкого подслоя.
Постоянная c1 должна быть определена экспериментально.
10.6. ТУРБУЛЕНТНОЕ ДВИЖЕНИЕ ЖИДКОСТИ В ТРУБАХ
Движение жидкости в трубах, как очень важное для практики,
интенсивно изучалось экспериментально многими исследователями, начиная с
Пуазейля (1840-42 г) и Рейнольдса (1876-83 г.). Более ранние опыты создавали,
как в настоящее время сказали бы, экспериментальную базу данных для
развития науки. Исследователи зачастую представляли только опытные
зависимости от некоторых отдельных параметров, характеризующих движение
(диаметр трубы, плотность жидкости, скорость движения и т.п.), а не имея
представления о подобии движений, не могли провести их обобщение.
Возможность правильной постановки опытов и обобщения их результатов
появилась лишь после введения в теорию критерия динамического подобия
потоков - числа Рейнольдса.
10.6.1. Движение жидкости в трубе с гладкими стенками
Шведский учёный Блазиус в 1911 г. в основу обобщения
экспериментальных результатов ввел число Рейнольдса, что позволило ему
эмпирически найти формулу для коэффициента сопротивления труб при
турбулентном движении, пригодную для любых жидкостей в широком
диапазоне скорости движения жидкости и диаметров труб.
Ранее было показано, что для расчета гидравлического сопротивления ΔР
гладких, круглых цилиндрических труб используется формула вида
P
ρυ 2 l
λ,
2 d
λ
λ (Re) ,
Re
ρυ d
.,
η
(10.6.1 17)
174
Здесь
- средняя по сечению трубы скорость движения жидкости.
Для ламинарного движения коэффициент гидравлического сопротивления
равен:
λ
64
,
Re
P~υ,
Re 2300 .
(10.6.2 18)
Для турбулентного движения Блазиус получил формулу
λ
0,3164
,
4
Re
P ~ υ7 4
υ2 ,
P ~ υ7 4
υ 2 , 2,3 103
Re 105 . (10.6.3 19)
Из предыдущих формул видно, что сопротивление труб
P при
ламинарном движении пропорционально первой степени средней скорости,
74
тогда как при турбулентном движении
или
P пропорционально
приблизительно квадрату скорости.
Предположим, что при турбулентном движении жидкости в трубе обеспечивается кинематическое подобие при изменении скорости и радиуса трубы.
Это означает, что, если в какой-то точке трубы скорость изменилась в некоторое
число раз, то во всех других точках она изменится во столько же раз. Если за
характерную выбрать скорость на оси трубы υ макс , то это условие
кинематического подобия можно записать следующим образом:
υ υмакс f
r
.
r0
(10.6.4 20)
Здесь r - расстояние от оси, r0 - радиус трубы.
Из закона сопротивления трубы при турбулентном течении при некоторых
предположениях можно вывести закон распределения скорости по сечению
трубы. Можно показать, используя формулу (10.6.3) для , что этот закон имеет
вид:
98
1/ 7
(r )
r / r0
,
(10.6.5 21)
макс 1
макс . ,
120
Таким образом, при турбулентном движении средняя скорость движения
жидкости по трубе мало отличается от максимальной в отличие от ламинарного
движения, при котором она равна υ (1/ 2)υмакс . Нa рис.10.7 представлены
примерные эпюры скоростей при ламинарном и турбулентном движении
r 2 / r02 . Как видно,
жидкости в трубе (для ламинарного движения (r )
макс 1
основное изменение скорости турбулентного движения наблюдается вблизи
поверхности, вблизи же оси это изменение мало.
В последствии турбулентное движение жидкости в трубах изучалось
многими исследователями. Для коэффициента сопротивления трубы в
175
настоящее время существует более десятка различных эмпирических формул.
Так, в 1932 г. Никурадзе, обработав свои экспериментальные результаты
согласно теории турбулентности Прандтля, получил для распределения
скоростей эмпирическую формулу:
y
r
2,5 ln
5,5 . (10.6.6 22)
турб.
ламин.
0
z
1
(r ) /
макс
Здесь у - расстояние от стенки трубы.
Характерная
скорость
по
экспериментально
измеряемым
величинам может быть определена
следующим образом
2
0
Рис.10.7
0
,
r0l
2
r0 P
,
2 l
0
2
r02 P , ,
r0 P
.,
2 l
,
.
Формула (10.6.6) хорошо описывает экспериментальные результаты во
всех точках сечения трубы, кроме, конечно, тонкого ламинарного подслоя,
примыкающего непосредственно к стенке. Из формулы (10.6.6) можно получить
уравнение для определения коэффициента λ гидравлического сопротивления
трубы:
1
0,88ln(Re
) 1,1 ,
Re
d
,
4 103
Re 3,2 106 . (10.6.7 23)
Формула Никурадзе (10.6.7) справедлива в более широком диапазоне изменения
чисел Рейнольдса, но более сложна для практического использования, чем
формула Блазиуса (10.6.3).
График зависимости коэффициента
сопротивления гладких труб от числа
Рейнольдса изображен на рис.10.8. Как
0,045
видно из рисунка, при переходе от
турб.
лам.
ламинарного
режима
течения
к
турбулентному коэффициент сопротивления
0,028
ln Re трубы возрастает скачком. Тщательные
5
опыты
Никурадзе
показывают,
что
Re 2300 Re 10
показатель степени в степенной формуле
Рис. 10.8
(10.6.5) для распределения скорости по
сечению трубы непрерывно убывает от 1/7 при Re = 4·103 до 1/10 при Re =
3,2 106. Это соответствует тому, что сопротивление трубы P с увеличением
ln
176
числа Рейнольдса приближается к квадратичному закону в зависимости от
средней по сечению скорости движения.
10.6.2.Турбулентное движение в трубах с шероховатыми стенками
Выше было рассмотрено турбулентное движение жидкости в гладких
трубах. Опыт показывает, что степень чистоты внутренней поверхности трубы
существенным образом сказывается на её сопротивлении, причем тем сильнее,
чем больше число Рейнольдса. Так трубы после длительной эксплуатации
(вследствие коррозии) увеличивают коэффициент сопротивления более, чем в
два раза. Очевидно, формулы для распределения скоростей и для коэффициента
сопротивления каким-то образом должны учитывать шероховатость труб. Это
тем более очевидно, поскольку шероховатость труб является геометрическим
параметром, необходимым для динамического подобия потоков.
Обозначим среднюю высоту бугорков шероховатостей на стенках через
h. В опытах Никурадзе шероховатость созln
давалась искусственно при помощи приклеивания к стенкам трубы песчинок, име4
ющих некоторый средний размер зерен h.
3
Очевидно, что трубы будут геометрически, а
2
1
потоки - динамически подобными, если для
I
II
III ln Re них сохраняется отношение h r0 . Следовательно, формулы
для распределения
Рис.10.9
скоростей и коэффициента сопротивления
шероховатых труб должны быть некоторыми функциями от относительной
шероховатости h r0 .
Обрабатывая многочисленные экспериментальные данные, Никурадзе
получил результаты, которые качественно иллюстрируют зависимость (Re) на
рис.10.9. Всю область чисел Рейнольдса можно разбить на три области: область
I ламинарного движения, переходную область II и область III, в которой
не
зависит от числа Рейнольдса. Как видно, трудно экспериментальные кривые
описать некоторой единой формулой. Однако для больших чисел Рейнольдса
(область III), когда коэффициент сопротивления не зависит от числа Рейнольдса,
а зависит лишь от относительной шероховатости, Никурадзе приводит
следующие эмпирические формулы:
2,5 ln
r
h
8,48 ,
1
0,87 ln
r0
h
1,74 ,
ln
h
4,25 .
(10.6.8 24)
Вышеприведенное условие применимости формул (10.6.8.24) на практике почти
всегда выполняется. Конечно, можно и не пользоваться формулами (10.6.8. 24),
а для практических расчетов брать данные прямо с графика на рис.10.9.
177
Сложный характер кривых на рис.10.9 можно объяснить физически. При
ламинарном движении (область I), если шероховатости не загромождают
сечения трубы, их влияние никак не сказывается на сопротивлении трубы. При
этом, очевидно, бугорки шероховатостей погружены в неподвижную между
ними жидкость, играющую роль смазки (рис.10.10а).
Даже при турбулентном движении в
основном потоке около стенки всегда
существует ламинарный подслой,
а) который прикрывает бугорки шероховатостей. При дальнейшем увеличеI
нии числа Рейнольдса (область II)
вершины бугорков начинают обнаб) жаться и с них срываются вихри, что
создает дополнительную турбулизацию
потока,
а,
следовательно,
II
увеличение
коэффициента
сопротивления (рис. 10б). Причем, это
в) произойдет при тем больших числах
Рейнольдса,
чем
меньше
относительная шероховатость трубы.
III
Наконец,
при
больших
числах
Рейнольдса (область III) бугорки
Рис.10.10.
шероховатостей полностью обнажаются
(рис.10.10в),
и
степень
турбулизации потока полностью определяется вихрями, срывающимися с их
вершин, и, следовательно, коэффициент сопротивления не зависит от числа
Рейнольдса, характеризующего основное движение в трубе.
Очевидно, что чем больше относительная шероховатость стенки h/r0 , тем
при меньших числах Рейнольдса наблюдается отклонение коэффициента λ от
рассчитанного по формуле Блазиуса для гладких труб, и тем большее его
значение наблюдается в области III (см. рис. 10.9).
10.7. РАЗВИТАЯ ТУРБУЛЕНТНОСТЬ
Рассмотрим свойства турбулентного движения, пользуясь методом
анализа размерностей физических величин (см тема 9)
После потери устойчивости движения в среде сначала появляются
крупные вихри, создающие крупные нерегулярные пульсации скорости:
частицы среды двигаются по сравнительно плавным траекториям, хотя их
траектории сильно перепутаны. По мере дальнейшего увеличения числа
178
Рейнольдса траектории частиц становятся менее плавными, появляются более
мелкие вихри. На фоне плавных траекторий появляются более мелкие их
искривления, а скорость частиц приобретает более мелкие нерегулярные
пульсации. При больших числах Рейнольдса турбулентное движение содержит
вихри от самых крупных до самых мелких, в которых частицы среды
перемещаются как целое с одинаковыми скоростями – такое движение
называют развитым турбулентным движением.
Очевидно, турбулентное движение можно рассматривать как результат
наложения движений различных масштабов. Под масштабом движения
понимают порядок тех расстояний, на которых скорость частиц среды
Re Re кр
изменяется
существенно.
При
появляются
сначала
крупномасштабные пульсации. Масштаб крупномасштабных движений
порядка размеров самой области движения l (для трубы порядка её диаметра d).
На
меньших
расстояниях
изменение
скорости
незначительно.
Крупномасштабные движения обладают и наибольшей амплитудой пульсаций,
т.е. разность скоростей u на концах отрезка l велика и может быть сравнимой
со средней скоростью движения на расстоянии l , т.е. u ~ .
При увеличении числа Рейнольдса появляются всё более и более
мелкомасштабные пульсации вплоть до пульсаций самого мелкого масштаба
0 . Области среды размером 0 двигаются при заданном числе Рейнольдса как
целое: внутри них частицы движутся с одинаковыми скоростями. На больших
расстояниях порядка l изменение скорости определяется, как отмечалось выше,
в основном крупномасштабными пульсациями, и по порядку величины оно
u . На малых же расстояниях изменение скорости определяется
равно
мелкомасштабными пульсациями.
Наряду с числом Рейнольдса Re (l ) / , характеризующим
турбулентное движение в целом, а так же крупномасштабное движение, можно
ввести понятие о числе Рейнольдса Reλ , характеризующим движение в любом
масштабе λ от самого мелкого до самого крупного:
Re
.
(10.7.1 25)
В (10.7.1) определяет масштаб движения, а
- порядок величины скорости
пульсационного движения этого масштаба.
При больших числах Рейнольдса скорости движения в целом велики,
велики и числа Рейнольдса крупномасштабных движений. Однако движение
среды при больших числах Рейнольдса можно рассматривать как движение
маловязкой (в пределе идеальной) среды. Поэтому крупномасштабное
движение, которое определяет и движение в целом, можно рассматривать как
движение идеальной среды, описываемое уравнением Эйлера. Отсюда следует,
179
что в крупномасштабных движениях не должно происходить заметной
диссипации энергии движения (
0 ).
С уменьшением масштаба движения
уменьшается и скорость
, а,
тем более, Re . Поэтому при уменьшении масштаба движения вязкость играет
всё большую роль вплоть до самого мелкого масштаба 0 . Именно в наиболее
мелкомасштабных движениях масштаба 0 происходит основная диссипация
энергии турбулентного движения.
Таким образом, можно представить следующую схему диссипации энергии механического движения среды при турбулентном движении. Почти вся
энергия турбулентного движения содержится в крупномасштабных движениях.
Эта энергия передается в движения самых мелких масштабов порядка 0 , в
которых и происходит её диссипация в тепло. То-есть, существует
направленный поток энергии от крупномасштабных к мелкомасштабным
движениям, причем этот поток, проходя промежуточные масштабы, остается
почти неизменным.
Определим порядок величины диссипируемой энергии Т в единицу
времени в единице массы среды. Как установлено, эта энергия определяется
крупномасштабным движением, хотя её диссипация происходит в самых
мелких масштабах. Поскольку крупномасштабное движение можно
0 ), то параметрами,
рассматривать как движение идеальной среды (
определяющими это движение, являются , u, l . Из этих определяющих
параметров можно образовать единственную комбинацию, имеющую
размерность Т:
3
T
~
u
.
l
(10.7.2 26)
Формула (10.7.2) определяет порядок величины диссипируемой энергии при
турбулентном движении в единице массы.
Как уже отмечалось, турбулентно движущуюся среду можно
рассматривать как среду, обладающую некоторой турбулентной вязкостью Т .
Очевидно, что турбулентная вязкость также должна определяться
крупномасштабным движением, т.е. теми же определяющими параметрами
, u, l , поскольку характер осредненного движения, очевидно, в основном
определяется крупномасштабными пульсациями. Из них можно образовать
лишь одну комбинацию, имеющую размерность коэффициента турбулентной
вязкости ηТ , порядок величины которой определяется выражением
T
~
u l.
(10.7.3 27)
180
Разделив правую и левую часть (10.7.3) на коэффициент динамической вязкости
получим:
T
u l
~
Re .
(10.7.4 28)
В формулах (10.7.3,4), вообще говоря, может стоять значительный
безразмерный численный коэффициент. Очевидно, что в формуле (10.7.4) этот
численный коэффициент значительно ближе к единице, если поделить правую
часть (10.7.4) на Re кр . Тогда при Re Re кр T
, что и следует из физических
соображений:
T
Re
.
Re кр
(10.7.5 29)
Тогда величина диссипируемой энергии может быть определена из (10.7.3,4)
следующим образом:
T
~
турб
u
l
2
.
(10.7.6 30)
Интересно сравнить полученное выражение с аналогичным выражением для ε
при ламинарном движении. Как показано в теме 8, энергия диссипации в
единице массы в единицу времени ламинарно движущейся несжимаемой среды
определяется по формуле:
dE
~
dt dV
2
2
i
k
xk
xi
u
l
2
.
(10.7.7 31)
Из (10.7.6, 7) видно, что формулы, определяющие порядок величины
диссипируемой энергии при турбулентном и ламинарном движениях
совершенно идентичны при замене на ηТ .
Рассмотрим движение в промежуточных масштабах
(l
0 ).
Очевидно, в качестве параметров, определяющих движение в промежуточных
масштабах можно выбрать
,
и
- поток энергии, “переходящий” от
крупномасштабных движений к движению самых мелких масштабов, в которых
он диссипируется в тепло. По-видимому, вязкость для движений в
промежуточных масштабах еще не играет заметной роли.
Оценим порядок
, т.е. величину изменения скорости на концах
отрезка порядка . Из вышеуказанных параметров можно образовать лишь
одну величину с размерностью скорости -
1/ 3
. Таким образом, имеем:
181
13
λ
υλ ~ ε λ ~ u
.
(10.7.8 32)
l
Из (10.7.8) видно, что изменение скорости на расстояниях порядка
пропорционально кубическому корню из этого расстояния. Соотношение
(10.7.8) называют законом Колмогорова-Обухова для турбулентного движения.
Перейдем, наконец, к рассмотрению самых мелких масштабов движения
0 , в которых и происходит диссипация энергии турбулентного движения
вследствие вязкости среды. Определим порядок величины самых мелких
масштабов движения 0 . Рассмотрим число Рейнольдса масштаба .
13
Re
43
u l
~
l
.
(10.7.9 33)
Очевидно, для самых мелких масштабов движения, когда вязкость играет
определяющую роль, Re 0 1 . Тогда из (10.7.9) следует:
0
~
l
Re
34
.
(10.7.10 34)
Формулу (10.7.10) можно получить, рассматривая в качестве
определяющих параметров движения в масштабах 0 параметры ,
и .
Формулой (10.7.10) определяется размер областей среды, которые при заданном
числе Рейнольдса движутся как целое. Чем больше число Рейнольдса, тем
меньше размер этих областей.
11. ПОГРАНИЧНЫЙ СЛОЙ
Как упоминалось выше, движение среды при больших числах
Рейнольдса можно рассматривать как движение идеальной среды,
подчиняющейся уравнениям Эйлера. Однако такое рассмотрение будет
заведомо неверным вблизи поверхности обтекаемого тела. При обтекании
неподвижного тела с большими скоростями скорость среды (газа)
уменьшается до нуля на его поверхности в тонком пристеночном слое,
который называют пограничным слоем. Пограничный слой характеризуется
большими градиентами скоростей, перпендикулярными к поверхности тела,
что свидетельствует о больших силах вязкости, определяющих движение
среды в этом слое.
Поэтому всю область движения обтекающей тело среды можно
разделить на две области: область тонкого пристеночного пограничного слоя,
в которой движение в основном определяется вязкостью среды, и вся
остальная область движения вне пограничного слоя, в которой среда
движется как идеальная. На такую возможность выделения двух областей при
обтекании средой тел указывал еще Д. И. Менделеев.
11.1. УРАВНЕНИЯ ПРАНДТЛЯ ДЛЯ ПОГРАНИЧНОГО СЛОЯ
11.1.1. Оценка слагаемых в уравнениях сохранения
Поскольку пограничный слой предполагается тонким, т.е. его толщина
δ значительно меньше размеров обтекаемого тела l, то движение среды в
пограничном слое можно рассматривать как плоское движение. Рассмотрим
стационарное изотермическое движение вязкой несжимаемой среды в
пограничном слое. Система уравнений сохранения имеет вид:
2
∂υ y
1 ∂P ⎛⎜ ∂ 2υ x ∂ υ y ⎞⎟
∂υ x
υx
,
+υ y
=−
+v
+
ρ ∂x ⎜⎝ ∂x 2 ∂y 2 ⎟⎠
∂x
∂y
⎛ ∂ 2υy ∂ 2υy
1 ∂P
+ υy
=−
+ v⎜ 2 +
υx
⎜ ∂x
∂x
∂y
∂y 2
ρ ∂y
⎝
∂υ y
∂υ y
∂υ x ∂υ y
+
= 0.
∂x
∂y
⎞
⎟,
⎟
⎠
(11.1.1)
183
Пусть ось x направлена вдоль поверхности обтекаемого тела
(рис.11.1.1). Оценим порядок слагаемых в уравнениях (11.1) в пограничном
слое. Очевидно скорость υ x внутри пограничного слоя порядка скорости
набегающего потока υ ∞ , а координата x порядка характерного размера l , т.е.
υ x ~ υ∞ ,
∂υ x υ∞
~
.
∂x
l
(11.1.2)
y
x
δ
l
Рис.11.1
Из
третьего
уравнения
системы (11.1.1) - уравнения
непрерывности оценка дает
υ∞ υ y
+
≅0,
δ
l
υ y ~ υ∞
δ
. (11.1.3)
l
Поскольку δ << l , то из (11.3) следует, что υ y << υ x . Остальные слагаемые
уравнений (11.1) имеют порядок:
∂υ x υ∞2
∂υ x υ∞2
∂ 2 υ x υ∞
υx
~
, υy
~
,
~
,
∂x
l
∂y
l
∂x 2
l
Подставляя эти оценки в уравнения (11.1.1), получим:
∂ 2 υ x υ∞
~ 2.
∂y 2
δ
⎛υ
υ∞2 υ∞2
υ ⎞
1 ∂P
+ v⎜⎜ ∞ + ∞2 ⎟⎟ ,
+
≈−
l
l
ρ ∂x
δ ⎠
⎝ l
⎛υ δ υ ⎞
υ∞2 δ υ∞2 δ
1 ∂P
+ v⎜⎜ ∞3 + ∞2 ⎟⎟ .
+
≈−
l
l
ρ ∂y
δ ⎠
⎝ l
.
(11.1.4)
Прежде всего, сравним слагаемые в скобках в правой части уравнения (11.1.4)
∂ 2 υx
∂x 2
2
∂ 2 υx ⎛ δ ⎞
≈ ⎜ ⎟ << 1 .
∂y 2 ⎝ l ⎠
Поэтому первым слагаемым в скобках в (11.1.4) можно пренебречь. Если
среда не вязкая ( v = 0 ), то вторыми слагаемыми в этих уравнениях можно
пренебречь, и тогда отношение поперечного градиента к продольному равно
∂P ∂P υ∞2 δ l
≈ 2 2 << 1 .
l υ∞
∂y ∂x
Такого же порядка δ l отношение любых соответствующих слагаемых в
уравнениях (11.1.4). Поэтому можно не рассматривать второе уравнение
(11.1.4), вообще полагая ∂P ∂y = 0 , свидетельствующее о том, что давление
поперек пограничного слоя постоянно и не зависит от y. С такими оценками
система уравнений (11.1.4) принимает вид:
184
∂υ x
∂υ x
∂ 2 υx
1 ∂P
υx
+ υy
=−
+v 2 ,
ρ ∂x
∂x
∂y
∂y
∂υ x ∂υ y
∂P
= 0.
= 0,
+
∂y
∂y
∂x
(11.1.5)
Обозначим скорость вне пограничного слоя через u = u ( x, y ) .
Рассмотрим линию тока, ограничивающую пограничный слой. Можно
полагать, что с внешней стороны эта линия находится в идеальной среде и
для нее справедливо уравнение Бернулли
P u2
+
= const ,
ρ 2
du
1 ∂P
= −u .
ρ ∂x
dx
(11.1.6)
С учетом этих соотношений уравнения движения вязкой несжимаемой среды
в пограничном слое имеют вид:
∂υ x
∂υ x
∂ 2 υx
du
υx
+ υy
=u
+v 2 ,
∂y
∂x
∂y
∂x
∂P
= 0,
∂y
∂υ x ∂υ y
= 0 . (11.1.7)
+
∂y
∂x
11.1.2. Уравнения Прандтля в безразмерном виде
Систему уравнений (11.1.7) называют уравнениями Прандтля для
пограничного слоя. Таким образом, задача об обтекании тела идеальной
вязкой несжимаемой средой при больших числах Рейнольдса распадается на
две задачи. Прежде всего, необходимо решить задачу об обтекании тела
несжимаемой средой, т.е. найти распределение скорости в поле течения около
тела. Причем, так как пограничный слой тонок ( δ << l ), то можно и не
увеличивать толщину тела на толщину пограничного слоя, а рассматривать
обтекание реального тела. Если первая задача решена, то известна скорость
u = u ( x, y ) .
Граничными являются условия: υ x = υ y = 0 при y = 0 , υ x = u при
y = δ . Подставляя u ( x, y ) на поверхности тела в уравнения (11.1.7), можно
найти компоненты скорости υx и υ y в пограничном слое как функции
координат, а ,следовательно, и силы вязкости, действующие на поверхность
тела со стороны движущейся среды.
Приведем уравнения Прандтля к безразмерному виду. Для этого
воспользуемся следующими масштабами измерения пространственных
координат и компонент скоростей:
x = lx* , y =
υ
υ l
l
y* , υ x = υ ∞υ* , υ y = ∞ υ ∗ y , u = υ ∞ u* , Re = ∞ . (11.1.8)
v
Re
Re
185
Здесь l – характерный размер обтекаемого тела, υ ∞ – характерная скорость –
например, скорость набегающего потока.
Подставляя соотношения (11.1.8) в уравнения Прандтля (11.1.7)
получим:
∂υ∗x υ∞ Re υ∞
∂υ∗x υ∞2 ∂u*
υ∞2
υ∞ Re ∂ 2 υ∗x
+
=
+v 2
,
υ∗x
υ∗ y
u*
∂x*
∂y*
∂x*
∂y*2
l
l
l
Re l
υ∞ ∂υ∗x υ∞ Re ∂υ∗ y
+
= 0,
l ∂x*
Rel ∂y*
∂P
= 0.
∂y
(11.1.9)
Деля первое уравнение (11.1.9) на υ ∞2 l , а второе на υ ∞ l , получим
следующие уравнения Прандтля для безразмерных величин
υ∗x
∂υ
∂υ x*
∂u ∂ 2υ∗x
,
+ υ ∗ y ∗ x = u* * +
∂y*2
∂y*
∂x*
∂x*
∂υ∗x ∂υ∗ y
∂P
+
= 0 . (11.1.10)
= 0,
∂x*
∂y
∂y*
Из уравнений (11.1.10) видно, что безразмерные уравнения не содержат
коэффициента вязкости среды. Не содержат коэффициента вязкости и
граничные условия: при y = 0 , υ x = 0 (υ ∗ x = 0 ) ; y = δ υ ∗ x = u∗ .
Общее решение системы (11.10) имеет вид:
υ∗x = f1 ( x* , y* ) ,
υ∗ y = f 2 ( x* , y* ) .
(11.1.11)
Очевидно, где-то в пограничном слое безразмерная координата y * будет
порядка единицы, т.е. y * ~ 1 . Тогда при помощи соотношений (11.1.8) можно
оценить порядок толщины пограничного слоя:
y* =
y Re
, y ~ δ,
l
y* ~ 1,
δ~
l
Re
.
(11.1.12)
11.1.3. Обтекание полубесконечной пластинки
В качестве примера рассмотрим стационарное обтекание вязкой
несжимаемой средой тонкой полубесконечной пластинки (рис.11.2).
Пусть
пластинка
y
расположена вдоль набегающего
потока. Решение первой части
задачи известно: при обтекании
пластинки идеальной средой она
υ∞
вообще не оказывает никакого
влияния на набегающий поток,
x
т.е. однородный поток остается
Рис.11.2
однородным около и после
186
пластинки. Следовательно u ( x, y ) = υ∞ = const , du / dx = 0 . В этом случае для
определения безразмерных компонент скорости движения среды внутри
пограничного слоя из (11.1.10) получаем следующие уравнения Прандтля:
υ∗x
∂υ∗x
∂υ
∂ 2 υ∗x
+ υ∗ y ∗x =
,
∂x
∂x
∂y 2
∂υ∗x ∂υ∗ y
+
= 0.
∂x
∂x
(11.1.13)
Граничные условия имеют вид:
y* = 0 , x* ≥ 0 ,
υ∗x = υ∗ y* = 0 ;
y = δ , υ∗x = 1.
Из безразмерных уравнений Прандтля (11.1.13) следует, что решение
системы можно записать в следующем общем виде:
υ∗x =
υx
f1 ( x* , y* ) ,
υ∞
υ∗ y = υ y
Re
= f 2 ( x* , y* ) .
υ∞
(11.1.14)
Однако в силу бесконечности пластинки это решение не должно зависеть от
характерного размера l. Это значит, что функции f 1 и f 2 должны зависеть от
таких комбинаций x* и y* , которые бы не содержали размер l. Такой
комбинацией является
y*
υ
y Re
=
=y ∞ .
vx
x* l x / l
(11.1.15)
Точно так же должен отсутствовать размер l и в определении υ y . Это
возможно только тогда, когда множитель перед функцией
следующее значение:
υy =
υ x
vυ∞ ⎛⎜ y* ⎞⎟
υ∞
.
f2
υ* y = ∞ ∗ f 2 ( x* , y* ) =
⎜ x ⎟ .
x
Re
Re x∗
⎝ *⎠
f2
имеет
(11.1.16)
Таким образом, искомые компоненты скорости υ x и υ y равны:
⎛ υ ⎞
υ x = υ∞ f1 ⎜⎜ y ∞ ⎟⎟ ,
vx ⎠
⎝
υy =
vυ∞ ⎛ υ∞ ⎞
⎟.
f 2 ⎜⎜ y
⎟
x
vx
⎝
⎠
(11.1.17)
При помощи уравнения непрерывности в (11.1.13) можно выразить
производную f 1′ через f 2′ или наоборот. Тогда, используя первое уравнение
Прандтля в (11.1.13), можно получить нелинейное дифференциальное
уравнение второго порядка для неизвестной производной f 2′ . Это уравнение
с использованием граничных условий может быть решено только численно и
приводит к следующим результатам. Например, сила вязкого трения σxy на
единицу площади поверхности пластины равна
187
σ xy
∂υ
=η x
∂y
= ηυ ∞
y =0
ρυ ∞ ∂f
⋅
ηx ∂y
= 0,332
y =0
ηρυ ∞3
x
.
(11.1.18)
Интегрируя вдоль пограничного слоя по x от 0 до l, получим силу
вязкого трения Fx, действующую на обе стороны пластинки единичной
ширины
l
Fx = 2 ∫ σ xy dx = 1,328 ηρlυ∞3 .
(11.1.19)
0
Толщину пограничного слоя на пластинке можно оценить следующим
образом. На границе пограничного слоя y = δ , а υ x = υ ∞ . Тогда f 1 должна
быть порядка единицы при любых x. Это, в свою очередь, может быть тогда,
когда безразмерный аргумент функции f 1 на границе пограничного слоя
( y = δ ) будет равен некоторому числу, постоянному для всего пограничного
слоя. Тогда имеем:
δ
υ∞
= const ,
vx
δ = const
vx
.
υ∞
(11.1.20)
Из (11.1.20) видно, что толщина пограничного слоя увеличивается
вдоль пластинки пропорционально корню квадратному из расстояния от
передней кромки пластинки и коэффициента кинематической вязкости. С
увеличением же скорости набегающего потока толщина пограничного слоя
уменьшается.
11.1.4. Толщина вытеснения
Вообще толщина пограничного слоя есть величина неопределенная.
Скорость среды в пограничном слое плавно переходит в скорость вне
пограничного слоя. Никакой резкой разницы между двумя областями
движения в действительности,
y
конечно, не существует. Для
определенности при сравнении
результатов различных методов
δ*
расчета пользуются понятием
толщины
вытеснения
δ*.
υ x Определение
толщины
υ∞
вытеснения очевидно из рис.11.3.
Рис. 11.3
Приравнивая площадь δ *υ ∞ и
площадь, заключенную между
188
асимптотой υ x = υ ∞ и кривой υ x = υ x ( y ) , получим:
δ* =
1
∞
υ∞
0
∫ (υ ∞ − υ x )dy .
(11.1.21)
В рассматриваемой выше задаче толщина вытеснения равна:
δ * = 1,72
vx
υ∞
(11.1.22)
.
11.1.5. Разгонный участок
Применим понятие о пограничном слое к оценке длины разгонного
участка в трубе. Пусть из некоторого резервуара среда поступает в плоскую
трубу, имея на входе почти однородное по сечению трубы распределение
скорости. По мере продвижения вдоль трубы профиль скорости становится
все более вытянутым и, наконец, после прохождения некоторого участка
трубы Lразг профиль скорости становится параболическим, соответствующим
точному решению задачи об установившемся ламинарном движении среды в
трубе (рис.11.4)
Lразг
y
h
1
2
3
Рис. 1.4
4
x
Можно рассматривать такую задачу следующим образом. Очевидно, в
начале трубы (участок 1 на рис.11.4) на ее стенке только начинает
формироваться пограничный слой, тогда как внутри трубы среда движется с
одинаковой по высоте трубы скоростью. По мере продвижения вдоль трубы
толщина пограничного слоя растет (участок 2 и 3), и после того, как она
становится равной высоте трубы (на участке 4, рис.11.4), можно полагать, что
профиль скорости становится параболическим, определяемым формулой
Пуазейля. Тогда, используя (11.1.22), получим формулу для определения
длины разгонного участка:
vLразг
h
,
δ * = = 1,72
2
υ
Lразг
h02υ
1
≅
≈ h Re ,
4 ⋅ 3,0v 12
Re =
υh
v
. (11.1.23)
189
Так при числе Рейнольдса, равным 600, длина разгонного участка равна
~50h. Это означает, что только на расстоянии пятидесяти высот от входного
сечения плоского канала движение в трубе будет подчиняться теоретическим
формулам, полученным для ламинарного движения. Более точное
аналитическое решение задачи о длине разгонного участка для
цилиндрической трубы с диаметром d приводит к результату:
1
Lразг = d ⋅ Re .
8
(11.1.24)
Из сравнения (11.1.23 и 24) следует, что длина разгонного участка в
цилиндрической трубе в 1.5 раза больше, чем в плоской трубе единичной
ширины. Это связано с тем, что при одинаковом расходе среды профиль
скорости в цилиндрической трубе более вытянут за счет сужения потока
стенками. В плоской трубе сужение потока осуществляется только нижней и
верхней параллельными стенками.
11.2 ИНТЕГРАЛЬНОЕ УРАВНЕНИЕ КАРМАНА
11.2.1. Решение системы уравнений Прандтля методом Кармана
От дифференциальных уравнений Прандтля (11.1.7) для пограничного
слоя можно перейти к одному интегральному уравнению. Для этого
проинтегрируем уравнения Прандтля (11.1.7) по толщине пограничного слоя.
Воспользуемся следующей известной формулой дифференцирования
интеграла с переменными пределами:
b( x )
∂ b( x )
∂f
db
da
f ( x, y )dy = ∫
dy + f ( x, b ) − f ( x, a ) .
∫
dx
dx
∂x a ( x )
a ( x ) ∂x
(11.2.1)
Проинтегрируем первое уравнение системы (11.1.7) по y от 0 до δ ( x ) .
Воспользовавшись формулой (11.2.1) получим для первого слагаемого
первого уравнения (11.1.7):
δ ( x)
∫ υx
0
∂
∂υ x
1 δ ( x) ∂ 2
(υ x )dy = 1 ∂ ∫υ x2 dy − 1 υ x2 (x,δ ( x)) dδ ( x) .
dy = ∫
dx
∂x
2 0 ∂x
2 ∂x 0
2
(11.2.2)
Интегрирование по частям второго слагаемого в (11.1.7) с использованием
второго уравнения для замены соответствующих производных дает:
190
δ
∫υ y
0
δ
∂υ y
∂υx
δ
dy = υ y υx 0 − ∫υx
dy = υ y ( x,δ )υx ( x,δ ) −υ y ( x,0)υx ( x,0) +
∂y
∂y
0
(11.2.3)
δ
∂υx
1∂δ 2
1 2
dδ
+ ∫υ x
dy =υ y ( x,δ )υx ( x,δ ) +
∫υx dy − 2υx (x,δ ) dx .
∂x
2 ∂x 0
0
При выводе соотношения (11.2.3) использованы
y = 0 , υx = 0 , υ y = 0 .
граничные условия: при
Проинтегрируем второе уравнение системы (11.1.7) - уравнение
непрерывности:
∂υ x
dy ,
0 ∂x
δ
δ
∫ dυ y = − ∫
0
υ y ( x, δ ) − υ y ( x,0 ) = −
∂δ
dδ
υ x dy + υ x ( x, δ ) . (11.2.4)
∫
∂x 0
dx
Подставляя полученное соотношение (11.2.4 26) в (11.2.3 25), получим:
∂υ x
∂ δ
1 ∂ ∂ 2
1
dδ
∫ ∂x dy = −υ x (x, δ ) ∂x ∫ υ x dy + 2 ∂x ∫ υ x dy + 2 υ x ( x, δ ) dx .
0
0
0
δ
(11.2.5)
Интегрирование слагаемых в правой части уравнения Прандтля (11.1.7)
приводит к результатам:
δ
du
du
∫ u dx dy = u dx δ ,
0
∂ 2υ x
∂υ x
∫ v ∂y 2 dy =v ∂y
0
δ
δ
= −v
0
∂υ x
∂y
.
(11.2.6)
y =0
В последнем соотношении (11.2.6) предполагается, что профиль скорости υ x
в зависимости от y плавно переходит при y = δ в скорость вне пограничного
слоя так, что ∂υ x ∂y при y = δ равно нулю. Принимая во внимание, что на
границе пограничного слоя υ x ( x, δ ) = u ( x ) и подставляя полученные
соотношения (11.2.2, 11.2.5, 11.2.6) в систему уравнений Прандтля (11.1.7),
получим интегральное уравнение Кармана для установившегося движения
вязкой несжимаемой среды в пограничном слое:
∂υ
∂ δ 2
∂ δ
υ
−
υ x dy + v x
dy
u
∫
∫
x
∂x 0
∂x 0
∂y
=u
y =0
du
δ.
dx
(11.2.7)
11.2.2. Обтекание полубесконечной пластинки
Рассмотрим решение задачи об обтекании плоской полубесконечной
пластинки потоком вязкой несжимаемой среды с использованием
интегрального уравнения Кармана (рис.11.2). Решение этой задачи приводит,
конечно, к прежним результатам, что и в п.11.2, с условием на границе
пограничного слоя вида:
191
u = υ∞ ,
u
du
= 0.
dx
(11.2.8)
Будем искать решение для υx в виде полинома третьей степени по y
υ x = a 0 + a1 y + a 2 y 2 + a 3 y 3 .
(11.2.9)
Коэффициенты a 0 , a1 , a 2 , a 3 определяются из граничных условий, и
зависят от δ как от параметра. В качестве граничных условий рассмотрим
следующие:
1. y = 0, υx = 0 ,
∂υ x
2 . y = δ , υ x = υ∞ , 3 .
∂y
=0,
y =δ
∂ 2 υx
4.
∂y 2
= 0 . (11.2.10)
y =0
Первые два граничных условия очевидны. Третье граничное условие
принимается, исходя из предположения, что скорость υx плавно переходит в
υ∞ на границе пограничного слоя. Четвертое условие следует из
дифференциального уравнения Прандтля, т.к. при y = 0 все его слагаемые
для плоской пластинки равны нулю, а, следовательно, равно нулю и
2
слагаемое ∂ 2υ x ∂y .
Из первого граничного условия следует a0 = 0 , а из четвертого условия
- a 2 = 0 . Второе и третье граничные условия приводят к уравнениям для
коэффициентов a1 и a 3 :
υ∞ = a1δ + a3δ 3 ,
0 = a1 + a3 3δ 2 .
(11.2.11)
Из решения системы уравнений (11.2.11) получаем коэффициенты а1 и а3:
a1 =
3 υ∞
,
2 δ
a3 = −
υ∞
.
2δ 3
Таким образом, скорость υx определяется соотношением
1 ⎛ y y3 ⎞
υ x = υ ∞ ⎜⎜ 3 − 3 ⎟⎟ .
2 ⎝ δ δ ⎠
(11.2.12)
После подстановки (11.2.12) в интегральное уравнение Кармана
(11.2.7),
последующего
интегрирования
и
дифференцирования
соответствующих слагаемых получим дифференциальное уравнение для δ в
виде:
13
dδ
1
υ∞
=v .
δ
140 dx
Решение этого уравнение дает:
(11.2.13)
192
280 v
δ2 =
x + C ..
13 υ∞
Постоянную интегрирования C , очевидно, следует положить равной нулю,
так как при x = 0 δ = 0 . Таким образом, толщина пограничного слоя равна:
δ=
vx
280 vx
= 4,64
.
13 υ∞
υ∞
(11.2.14)
Найдем силу σху, действующую на единицу площади пластинки:
σ xy = η
∂υ x
∂y
y =0
υ∞3 ηρ
ρηυ∞3
3
1
3
= ηυ∞ =
= 0,323
. (11.2.15)
2
x
x
δ 2 ⋅ 4,64
В точном решении (11.1.18) численный коэффициент равен 0,332. Интегрируя
вдоль длины пластинки, найдем силу Fx, действующую на обе стороны
пластинки единичной ширины длиной l:
Fx = 1,292 ηρlυ∞3 ,
(11.2.16)
В точном решении (11.1.19) численный коэффициент равен 1,328,
Найдем толщину вытеснения:
δ* =
υ∞ ⎛ y y 3 ⎞ ⎤
1 δ
1 δ⎡
⎛ 3 1⎞ 3
⎜⎜ 3 − 3 ⎟⎟⎥ dy = δ ⎜1 − + ⎟ = δ . (11.2.17)
(
)
υ
υ
dy
υ
−
=
−
∫
∫
⎢ ∞
x
∞
2 ⎝ δ δ ⎠⎦
υ∞ 0
υ∞ 0 ⎣
⎝ 4 8⎠ 8
Подставляя в это определение значение δ из (11.2.14 35), получим:
δ* = 4,64 ⋅
xv
3 xv
≅ 1,74
.
8 υ∞
υ∞
(11.2.18)
Точное решение (11.1.22) дает коэффициент 1,72 вместо 1,74,
Таким образом, интегральное соотношение Кармана позволяет
довольно просто получить решение поставленной задачи, практически не
отличающееся от ее точного решения.
193
11.3. ОТРЫВ ПОГРАНИЧНОГО СЛОЯ.
Из опыта известно, что при обтекании выпуклых тел при увеличении
числа Рейнольдса происходит отрыв потока от поверхности обтекаемого тела
и образование зоны вихревого турбулентного движения за кормой тела, что
приводит к резкому возрастанию силы сопротивления. С физической точки
зрения это явление можно объяснить следующим образом.
Рассмотрим
обтекание
υ max
некоторого выпуклого тела (рис.11.5).
Pmin
υ ↑, P ↓
υ ↓, P ↑ Максимальная площадь сечения тела
плоскостью,
перпендикулярной
набегающему
потоку,
называют
площадью миделева сечения.
Рассмотрим
линию
тока,
Рис. 11.5
граничную с пограничным слоем. Если
скорость потока велика, можно полагать, что она проходит в “идеальной”
среде. и к ней применимо уравнение Бернулли. Вдали от тела линия тока
параллельна скорости набегающего потока. Опираясь на точные решения,
можно утверждать, что скорость потока возрастает вниз по потоку от
скорости набегающего потока до некоторой максимальной скорости в
миделевом сечении. Следовательно, согласно уравнению Бернулли давление
при этом уменьшается от давления в набегающем потоке до минимального
давления в миделевом сечении. После миделева сечения картина изменяется
на обратную: скорость вниз по потоку уменьшается, а давление возрастает.
Поскольку давление поперек пограничного слоя не изменяется и
определяется давлением на его внешней границе, как отмечалось в п. 11.1, то
и внутри пограничного слоя давление после миделева сечения будет
возрастать вниз по потоку.
Таким
образом,
среда
в
пограничном слое за миделевым
сечением тормозится не только
Рмин <
< Р1
вследствие вязкости, но так же и
вследствие
противодавления,
препятствующего её движению. В
результате может оказаться. что
Рис. 11.6.
вблизи поверхности тела скорость
движения среды внутри пограничного слоя вообще окажется равной нулю не
только на поверхности тела, но и в близких к поверхности тела участках
194
среды (рис.11.6). Более того, в точках, лежащих еще ниже по потоку, среда в
пограничном слое может двигаться навстречу движению вне пограничного
слоя. На рис.11.6 изображены примерные эпюры скоростей внутри
пограничного слоя за миделевым сечением.
Ясно, что такое встречное движение стимулирует образование
завихренности потока в кормовой части тела, пограничный слой как бы
“подмывается” встречными движениями и отрывается от поверхности тела в
виде крупных нерегулярных вихрей. Это, конечно, приводит к резкому
увеличению сопротивления тела.
Следовательно, для уменьшения сопротивления обтекаемых тел
необходимо, если это возможно, предотвратить отрыв пограничного слоя
или, если это невозможно, то, по крайней мере, стремиться к тому, чтобы его
отрыв произошел как можно ближе к задней кромке обтекаемого тела. В
последнем случае размер области спутного турбулентного движения будет
меньше, а, следовательно, будет меньше и сопротивление тела.
Рис.11.7
Поэтому хорошо обтекаемые тела
должны иметь каплевидную форму с
плавной, постепенно сужающейся
кормовой
частью.
Поверхности
хорошо обтекаемых тел должны быть
гладкими,
лишенными
даже
незначительных
выступов
и
шероховатостей. Такую форму имеют
профили крыльев и фюзеляжей
современных самолетов (рис.11.7а).
Иногда для предотвращения отрыва пограничного слоя впереди крыла
ставят предкрылки, в которых воздух разгоняется и “продувает” пограничный
слой до конца профиля (рис.11.7б). Также в кормовой части используют
закрылки, выпускаемые на взлете на угол ~ 20о , а на посадке до 50о с целью
увеличения подъемной силы на малых скоростях движения и увеличения
силы сопротивления на посадке с одновременным сдвигом точки отрыва
пограничного слоя к задней кромке крыла..
Одним из способов предотвращения отрыва пограничного слоя
является также отсос воздуха внутрь обтекаемого крыла (Рис. 11.7в). При
этом пограничный слой как бы “прижимается” к поверхности обтекаемого
тела. Дополнительные энергетические затраты на отсос воздуха окупаются
уменьшением сопротивления тела, а, следовательно, уменьшением тяги
двигателя и экономией расходуемого топлива.
195
Для хорошо обтекаемых тел основной вклад в силу сопротивления дает
не лобовое сопротивление, а вязкие силы трения среды о его поверхность.
Для резкого увеличения силы лобового сопротивления (например, во время
атаки при обгоне самолета противника или на пикировании во время атаки
наземного объекта) на фюзеляже самолета в хвостовой части с обеих сторон
предусмотрены тормозные щитки площадью ~ 1.5 м2, которые могут
выпускаться под углом к продольной оси симметрии вплоть до 80о.
11.4. ТУРБУЛЕНТНЫЙ ПОГРАНИЧНЫЙ СЛОЙ И КРИЗИС
СОПРОТИВЛЕНИЯ.
11.4.1. Две области в пограничном слое
Ламинарное движение среды в пограничном слое при больших числах
Рейнольдса становится неустойчивым, и после потери устойчивости
движение в пограничном слое становится турбулентным.
Действительно, можно провести аналогию между движением в
пограничном слое и движением в плоской трубе. Средняя скорость внутри
пограничного слоя порядка скорости набегающего потока υ∞ . Вместо
расстояния между плоскостями трубы можно рассматривать толщину
пограничного слоя. Тогда число Рейнольдса в пограничном слое можно
записать, как Re = υ∞ δ v . Но ранее в п.1.2 было показано, что δ ~ x ,
поэтому и Re ~ x . При увеличении толщины пограничного слоя
увеличивается и число Re. При достижении числа Рейнольдса в пограничном
слое некоторого критического значения движение в нём становится
турбулентным.
Это означает, что если в
Внешний поток
некоторой
точке
x
число
Рейнольдса достигнет своего
критического
значения,
то
Лам. слой
Турб. слой
пограничный слой будет состоять
из двух областей: ламинарной
передней области и последующей
области турбулентного движения
Рис. 11.8.
в пограничном слое (рис.11.8).
Расчет турбулентного движения в пограничном слое основан на теории
турбулентности Прандтля, предсказывающей логарифмический профиль
скорости среды в пограничном слое с некоторыми эмпирическими
коэффициентами. Как показывает опыт, толщина турбулентного
196
пограничного слоя пропорциональна x , а не x как для ламинарного слоя,
т.е. толщина турбулентного пограничного слоя растет вниз по потоку
быстрее, чем ламинарного.
11.4.2. Кризис сопротивления при обтекании шара
В качестве примера рассмотрим изменение силы сопротивления шара
при обтекании его вязкой несжимаемой жидкостью в зависимости от числа
Рейнольдса. Экспериментальный график зависимости коэффициента
сопротивления от числа Рейнольдса имеет вид, приведенный на рис.11.9.
При
малых
числах
ln C x
I
II
Рейнольдса
коэффициент
сопротивления
определяется
формулой Стокса (область 1):
III
Cx =
I
II
24
.
Re
Re =
υ∞ d
.
v
При
дальнейшем
увеличении числа Рейнольдса
коэффициента
10 2 10 3 10 4 2,5 ⋅ 10 2
ln Re уменьшение
сопротивления
несколько
Рис. 11.9.
замедляется, а в дальнейшем
даже возрастает. Возрастание связано с тем, что при этих числах Рейнольдса
происходит отрыв ламинарного пограничного слоя от поверхности, и за
шаром образуется большая область II с нарастающей интенсивностью
турбулентного движения, размер которой в основном и определяет силу
сопротивления шара из-за возрастания коэффициента сопротивления.
Далее, в довольно широком интервале изменения чисел Рейнольдса
коэффициент
сопротивления
остается
практически
неизменным.
Действительно, как следует из безразмерных уравнений Прандтля, картина
движения в ламинарном пограничном слое при увеличении числа Рейнольдса
подвергается подобному преобразованию. При этом все продольные
координаты и скорости остаются неизменными, а поперечные уменьшаются
обратно пропорционально x . Следовательно, и продольная координата
точки отрыва пограничного слоя не изменяется при увеличении числа
Рейнольдса. Поэтому не изменяется и размер турбулентной области за шаром,
а стало быть, и коэффициент сопротивления должен оставаться
приблизительно постоянным.
При числах Re ~ 2,5·105 происходит турбулизация пограничного слоя,
что приводит к смещению точки отрыва пограничного слоя в кормовую часть
III
197
шара и резкому уменьшению коэффициента лобового сопротивления почти в
2 раза и более, хотя число Рейнольдса возрастает. Это явление называют
кризисом сопротивления шара.
При дальнейшем увеличении числа Re коэффициент лобового
сопротивления Сх несколько увеличивается, а затем остаётся постоянным.
В заключении заметим, что решение задачи о пограничном слое с
помощью безразмерных уравнений Прандтля относят к классу
автомодельных решений. В
таких решениях профили безразмерных
скоростей, давлений и температур изменяются подобным образом при
изменении безразмерных геометрических координат, т.е. не зависят от их
реальных значений. Например, независимость коэффициент Сх от числа Re в
области II и III на рис. 11.9 подтверждает автомодельность решения задачи.
197
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ........................................................................................................ 197
12.2. Параметры газа в заторможенном потоке............................................ 201
12.3.1. Максимальная и критическая скорость .................................... 203
12.3.2. Изменение плотности потока вдоль линии тока...................... 204
12.3.3. Сопло Лаваля............................................................................... 205
12.5.1. Конус Маха .................................................................................. 210
12.5.2. Поверхности разрыва. Законы сохранения ...............................211
12.6. Прямая ударная волна в сжимаемом газе ............................................ 214
12.6.1. Ударная адиабата (адиабата Гюгоньо) ...................................... 214
12.6.2. Связь между скоростями и термодинамическими
параметрами в прямой ударной волне ............................................. 215
12.7.Ударные волны слабой интенсивности................................................. 219
12.7.1. Изменение термодинамических параметров и скоростей
в прямой ударной волне..................................................................... 219
12.7.2. Образование ударных волн ........................................................ 222
12.7.3.Численный пример....................................................................... 223
12.8. Косая ударная волна............................................................................... 225
12.8.1. Уравнение ударной поляры........................................................ 225
12.8.2. Максимальный угол поворота потока....................................... 228
12.8.3. Изменение скорости за косой ударной волной ........................ 229
12.8.4. Обтекание клина сверхзвуковым потоком................................ 231
12.8.5. Трубка Пито в сверхзвуковом потоке........................................ 234
12.9. Волна разрежения .................................................................................. 236
12.9.1. Изменение термодинамических параметров и скоростей
в волне разрежения ............................................................................ 236
12.9.2. Максимальный угол поворота потока в волне
разрежения .......................................................................................... 239
12.9.3. Сектор, занимаемый волной разрежения ................................. 241
12.9.4. Тангенциальный разрыв скорости в волне разрежения. ......... 243
12.10. Взаимодействие ударных волн и волн разрежения .......................... 245
12.10.1. Отражение ударной волны от стенки...................................... 245
12.10.2. Пересечение двух ударных волн ............................................. 247
12.10.3. Взаимодействие ударной волны и волны с
тангенциальным разрывом................................................................ 249
12.10.4. Возникновение ударной волны в пограничном слое ............ 250
198
12.11. Истечение газа из сужающегося насадка........................................... 252
12.12. Сопло Лаваля в нерасчетном режиме ................................................ 253
12.13. Обтекание пластинки сверхзвуковым потоком под малым
углом атаки ................................................................................................ 254
199
12. ГАЗОВАЯ ДИНАМИКА
В предыдущих разделах в основном рассматривалось движение
несжимаемой жидкости. Если для капельных (обладающих поверхностным
натяжением) жидкостей эти рассмотрения справедливы в широком интервале
скоростей, то для газов это не так. Отмечалось, что движение газов можно
рассматривать как движение несжимаемой жидкости лишь при скорости его
движения, существенно меньшей скорости распространения в нем малых
возмущений (скорость звука). При скоростях движения газа, равных или больше
скорости звука, движение настолько специфично, что является предметом
изучения специального раздела механики - газовой динамики.
12.1. СКОРОСТЬ ЗВУКА
Известно, что скорость распространения малых возмущений в сплошной
среде или скорость звука определяется следующим соотношением:
⎛ ∂P ⎞
c = ⎜⎜ ⎟⎟ .
⎝ ∂ρ ⎠ s
(12.1.1)
Для идеального газа, занимающего объем V при давлении P и
изолированного от окружающей среды, процесс распространения малых
возмущений описывается уравнением Пуассона – уравнением адиабаты
⎛ ∂P ⎞
P RT
P
C
P
RT
⎜⎜ ⎟⎟ = γ ,
=
=
const
,
, c= γ = γ
, γ = P . (12.1.2)
γ
ρ
ρ ρ μ
ρ
μ
CV
⎝ ∂ρ ⎠ s
P
В формулах (12.1.2) γ - показатель адиабаты Пуассона, C P , CV - удельные
теплоемкости при постоянном давления и объёме, соответственно; μ молекулярный вес газа, R =8,314 Дж/ ( моль ⋅ K ) - универсальная газовая
постоянная
Для показателя адиабаты элементарная кинетическая теория дает
следующее соотношение:
γ=
N +2
,
N
γ =
i+2
.
i
Здесь N - число степеней свободы молекулы газа. Так, для одноатомного газа N=3, γ =5/3=1,67; для двухатомного газа - N=5, γ =7/5=1,4.
Из сравнения скорости звука со средней тепловой скоростью молекул
υ t = (8RT / πμ )1 / 2 , видно, что они примерно равны. Этого и следовало ожидать,
поскольку всякое взаимодействие между двумя соседними макроскопическими
200
частицами газа происходит только
через столкновения их молекул.
Следовательно, скорость распространения такого взаимодействия (скорость
распространения малых возмущений) будет происходить со средней скоростью
движения молекул. Величина γ и удельные теплоемкости мало изменяются с
изменением температуры и давления, и в большинстве задач их можно считать
постоянными.
Как видно из таблицы 12.1, величины γ и C P слабо зависят от
температуры и давления, хотя элементарная кинетическая теория такой
зависимости не предсказывает. Это происходит потому, что при повышении
температуры постепенно возбуждаются внутренние степени свободы молекул, а
при увеличении давления газ нельзя считать идеальным.
Таблица 12.1
ЭКСПЕРИМЕНТАЛЬНЫЕ ЗНАЧЕНИЯ γ
T ,K
100
500
1000
2000
Воздух P =1атм.
γ
C P , кал/(г*К)
1.42
1.39
1.34
1.27
И
CP
ДЛЯ ВОЗДУХА
Воздух при T =500K
γ
C P , кал/(г*К)
P , атм.
1
1.39
0.246
10
1.39
0.247
100
1.43
0.256
0.246
0.246
0.273
0.320
Поскольку скорость звука зависит только от температуры, то во всех
термодинамических формулах и соотношениях можно температуру заменить
скоростью звука.
Из термодинамики известно:
⎛ ∂ε ⎞
СV = ⎜ вн ⎟ ,
⎝ ∂T ⎠V
ε вн = CV T + const .
(12.1.3)
Если внутренняя энергия при T = 0 равна нулю, то ε вн = CV T .
Используя определение энтальпии единицы массы, можно получить
следующие соотношения:
RT
R
h = ε вн + PV = CV T + PV = CV T +
= (CV + )T = C PT ,
μ
С P − CV =
R
μ
PV =
,
RT
μ
,
μ
V=
1
ρ
.
(12.1.4)
Из соотношений легко получить формулу:
γ =
C
PV
CP
, CP − P =
,
CV
γ
T
СP =
γ
PV
1 PV
P
, CV =
, с 2 = γ . (12.1.5)
ρ
γ −1 T
γ −1 T
Из (12.1.3-5) легко получить следующие формулы для внутренней энергии и
энтальпии единицы массы:
201
ε вн
γPV
γ P с2
. (12.1.6)
=
=
h = C PT =
γ −1 γ −1 ρ γ −1
PV
с2
1 P
,
= СV T =
=
=
γ − 1 γ − 1 ρ γ (γ − 1)
Используя уравнение Пуассона, можно показать, что энтропия единицы массы
при изоэнтропическом движении равна:
S = CV ln
P
ργ
.
12.2. ПАРАМЕТРЫ ГАЗА В ЗАТОРМОЖЕННОМ ПОТОКЕ
При больших скоростях движение газа вне тонкого пограничного слоя
можно рассматривать как движение идеальной среды, лишенной вязкости и
теплопроводности. Тогда движение каждой индивидуальной частицы газа
можно рассматривать как адиабатическое, и для любой линии тока справедливо
уравнение Бернулли для единицы массы:
υ2
2
+ h = const .
(12.2.1)
Найдем плотность, давление и температуру газа в критической точке
на обтекаемом теле, где скорость потока равна 0. Для критической линии тока
можно записать:
υ2
υ∞2
+ h∞ = 0 + h0 = h0 ,
2
2
υ∞2
γ P∞
γ P0
.
+
=
2 γ − 1 ρ∞ γ − 1 ρ0
(12.2.2)
Из (12.2.2) имеем:
P0 ρ∞
γ − 1 2 ρ∞
γ − 1 υ∞2
.
=1+
=1+
υ∞
2γ
2 c∞2
P∞ ρ0
P∞
(12.2.3)
Здесь υ и c - скорость газа и скорость звука в одной и той же точке на линии
тока, соответственно. Отношение υ /c=M называют числом Маха.
Выражая в равенстве (12.2.3) отношение плотностей ρ ∞ / ρ 0 через
отношение давлений по уравнению Пуассона (12.1.2), получим формулы:
1
P0 P∞
,
=
ρ0γ ρ∞γ
для отношения плотностей
ρ ∞ ⎛ P∞ ⎞ γ
=⎜ ⎟ ,
ρ 0 ⎜⎝ P0 ⎟⎠
γ
P0
γ − 1 2 γ −1
= (1 +
M∞) ,
P∞
2
(12.2.4)
202
1
ρ0
γ − 1 2 γ −1
= (1 +
M∞) .
2
ρ∞
(12.2.5)
Воспользовавшись уравнением Клапейрона, получим:
P0 =
R
μ
T0 ρ 0 , P∞ =
R
μ
T∞ ρ ∞ ,
P0 T0 ρ 0
T
P ρ
. 0 = 0⋅ ∞.
=
T∞ P∞ ρ 0
P∞ T∞ ρ ∞
Из соотношения (12.2.4-5) следует:
T0
γ −1 2
=1+
M∞ .
T∞
2
(12.2.6)
Температуру газа Т0 в критической точке на обтекаемом теле называют
температурой торможения. При больших скоростях движения температура
торможения может оказаться значительной. Так, например, спутник при
торможении входит в атмосферу со скоростью υ ~ 4000м/сек, что соответствует
числу Маха, равному ~10. Вычисленная по формуле (12.2.6) для воздуха (γ =1,4)
и T∞ = 3000K температура торможения Т0 равна ~ 6000 0K. При такой
температуре поверхность спутника оплавляется, и если он не сгорает, то
только благодаря кратковременности воздействия столь высокой температуры и
теплообмену с окружающей средой. Причем, такая температура будет не только
в критической точке, но и на всей поверхности обтекаемого тела, т.к. в силу
условий прилипания на поверхности и вязкости скорость газа на поверхности
тела также равна нулю. Для спасения спутника применяются специальные
конуса, сгорающие в атмосфере, а также спецпокрытия на основе
высокопористых керамик, через которые испаряются жидкости для
уменьшения выделяющегося при торможении тепла,.
При больших скоростях сжимаемой среды справедливо уравнение
Бернулли:
υ2
2
+h=
υ2
2
+ C PT = const
При обтекании выпуклого тела скорость в миделевом сечении становится
максимальной, а, следовательно, температура газа минимальной. Этим можно
объяснить образование инверсионного следа за самолетом при полете в
воздухе, достаточно насыщенном влагой. Если температура в воздухе близка, но
несколько больше температуры конденсации, то понижение температуры,
создаваемое движением самолета, может оказаться достаточным
для
конденсации и образования за ним характерной пелены.
203
Термометр, погруженный в
движущийся
газ,
не
покажет
температуру газа, а покажет температуру торможения. Так, например,
термометр, помещенный в воздух, движущийся, со скоростью 100 м/сек,
покажет температуру:
2
⎡
⎛ 100 ⎞ ⎤
T0 = T∞ ⎢1 + 0.2⎜
⎟ ⎥ ≈ T∞ (1 + 0.018) .
⎝ 340 ⎠ ⎦
⎣
Если температура газа T∞ равна 300°К, то термометр покажет температуру на
5,4° большую, чем температура газа, которую он показал бы, если бы двигался
вместе с газом со скоростью 100 м/сек.
12.3. СТАЦИОНАРНЫЙ
ОДНОМЕРНЫЙ ПОТОК СЖИМАЕМОГО ГАЗА
12.3.1. Максимальная и критическая скорость
Рассмотрим линию тока, которая начинается в неподвижном газе,
например, в некотором содержащем неподвижный газ сосуде, который вытекает
из сосуда в окружающее пространство. Для такой линии тока можно на
основании уравнения Бернулли для адиабатного движения записать:
υ2
+ h = h0 ,
2
υ = 2(h0 − h) .
(12.3.1)
Здесь h0 – энтальпия единицы массы неподвижного газа. Скорость движения
газа имеет максимальное значение, если h = CPT= 0, что возможно только
тогда, когда абсолютная температура газа Т = 0 в объёме, в который вытекает
газ. В этом случае максимальная скорость равна
υ макс = 2h0 = c0 ⋅
2
.
γ −1
(12.3.2)
Из вывода видно, что υ макс – это максимальная скорость направленного
движения, которая может быть получена при истечении газа из сосуда в вакуум.
Характерно, что согласно определению скорости звука она зависит только от
температуры газа в сосуде, но не зависит от давления в нем. При этом
абсолютная температура вытекающего газа должна быть равна нулю.
Далее рассмотрим некоторую линию тока в потоке газа,
перемещающегося по сужающемуся насадку (трубе). Из уравнения Бернулли
для адиабатического движения следует, что при увеличении скорости вдоль
линии тока температура газа уменьшается, а, следовательно, уменьшается и
скорость звука. Может оказаться, что в какой-то точке рассматриваемой линии
тока скорость движения газа станет равной скорости звука в этой точке.
Скорость движения
газа, равную местной скорости звука, называют
204
критической
скоростью
и обозначают как
скорость может быть найдена из уравнения Бернулли:
υ2
+ h = const ,
2
c*..
Критическая
с02
с∗2
с∗2
с2
υ2
γ +1
+
=
+0= +
= с∗2
.
2 γ −1 γ −1
2 γ −1
2( γ − 1)
Таким образом, критическая скорость равна:
с* = с 0
2
.
γ +1
(12.3.3)
Из (12.3.2, 3) видно, что как максимальная, так и критическая скорости
определяются скоростью звука в неподвижном газе, и зависят лишь от
температуры неподвижного газа Т0 .
12.3.2. Изменение плотности потока вдоль линии тока
Рассмотрим изменение плотности потока ρυ вдоль линии тока.
Поскольку при больших скоростях необходимо учитывать сжимаемость газа, то
изменение плотности потока равно:
d ( ρυ ) = ρdυ + υdρ ,
d ( ρυ )
ρυ
=
dυ
υ
+
dρ
ρ
.
(12.3.4)
Запишем уравнение Бернулли для линии тока при адиабатическом движении:
υ2
2
+ h = const ,
υdυ + dh = 0 .
Ранее в разделе 2 (п. 7.1) было показано, что при адиабатическом движении
энтропия сохраняется, и изменение энтальпии определяется только изменением
давления, то есть dh = VdP = dP / ρ . Используя определение скорости звука
предыдущее уравнение Бернулли можно записать в
c 2 = (∂P / ∂ρ )s ,
дифференциальной форме :
υdυ + dh = υdυ +
dP
ρ
= υdυ + c
2
dρ
ρ
= 0,
После подстановки относительной плотности
d( ρυ ) ⎛ υ 2 ⎞ dυ
= ⎜⎜ 1 − 2 ⎟⎟ ,
ρυ
c ⎠υ
⎝
dρ
υ 2 dυ
.
=− 2
ρ
c υ
dρ
ρ
в (12.3.4), получим:
d ( ρυ )
υ2
= ρ (1 − 2 ) = ρ (1 − M 2 ) .
dυ
c
(12.3.5)
Соотношение (12.3.5) определяет изменение плотности потока с
изменением скорости движения. Отношение этих величин определяется
значениями плотности ρ и числа Маха М. Знак отношения (12.3.5) определяется
205
знаком дифференциалов d ( ρυ ) и dυ , которые могут быть положительными
и отрицательными.
Рассмотрим некоторую трубку тока. По определению во всех сечениях
трубки тока расход постоянен:
ρυs = const ,
ρυds + sd ( ρυ) = 0 ,
d ( ρυ)
ds
=− .
ρυ
s
(12.3.6)
Из последнего соотношения видно, что изменение плотности потока
противоположно изменению площади сечения трубки тока. Поэтому при
дозвуковом течении M<1 при увеличении скорости ( dυ >0) растет и плотность
потока ( dρυ )>0), а трубка тока сужается (ds < 0). При сверхзвуковом же
движении (M>1) при увеличении скорости ( dυ >0) плотность потока
уменьшается ( dρυ <0), а, следовательно, трубка тока расширяется (ds > 0).
Таким образом, при дозвуковом движении для увеличения скорости
движения газа вдоль трубки тока ее сечение должно уменьшаться, а плотность
потока возрастает. При этом, как следует из уравнения Бернулли,
температура газа вдоль трубки тока уменьшается, следовательно,
уменьшается и местная скорость звука, также уменьшаются вдоль трубки тока
плотность и давление:
υ2
υ2
υ2
c2
υ2
γ P
+h=
+ C pT = const =
+
=
+
=
2
2
2 γ −1 2 γ −1 ρ
2
2
γ −1
γ
(12.3.7)
υ
γ
υ
γ
+
constρ γ −1 =
+
constP .
2 γ −1
2 γ −1
При сверхзвуковом движении для увеличения скорости газа вдоль трубки
тока сечение трубки должно увеличиваться, а плотность потока уменьшаться.
Так же как и в дозвуковом потоке уменьшаются температура, скорость звука,
плотность и давление.
=
12.3.3. Сопло Лаваля
Из вышесказанного следует, что в сужающейся трубке тока не может
быть достигнута сверхзвуковая скорость, может быть достигнута только
критическая скорость. Скорость движения газа может стать сверхзвуковой
только в расширяющейся трубке тока. Для разгона газа до звуковой скорости он
должен двигаться в сужающейся трубке тока. При одномерном движении
идеального газа в реальной трубе ее стенки можно рассматривать как боковую
поверхность трубки тока. Труба, плавно переводящая дозвуковое движение газа
в сверхзвуковое, имеет сужающуюся дозвуковую и расширяющуюся
сверхзвуковую части (рис.12.1). Такую трубу называют соплом Лаваля.
Очевидно, что в самом узком сечении сопла скорость газа будет равна
206
критической (местной в этом сечении) скорости звука. Нетрудно
найти зависимость числа Мaxa от размера сечения сопла.
Разделим (12.3.5) на ρυ и
умножим на dυ, используя
(12.3.6), получим уравнение:
M<1
M>1
−
ds dυ
υ
= (1 − M 2 ), M = ,
s
c
υ
dM dυ dc
=
−
. (12.3.8)
M
υ
c
Из уравнения Бернулли имеем:
υdυ +
dυ
2
cdc = 0 ,
γ −1
υ
=−
2 c 2 dc
2 1 dc
.
=
−
γ −1υ 2 c
γ −1 M 2 c
(12.3.9)
Подставляя (12.3.9) в (12.3.8), получим:
dυ
dM
=
υ
M
1
1+ M
2
γ −1
2
.
ds
− =
s
(1 − M 2 )dM
.
γ −1 2
M (1 +
M )
2
(12.3.10)
После интегрирования (12.3.10) получаем:
γ +1
s
s min
1
=
M
⎛ 2 + ( γ − 1) M 2 ⎞ 2 ( γ −1)
⎜⎜
⎟⎟
.
γ
1
+
⎝
⎠
(12.3.11)
Здесь smin - минимальное сечение сопла Лаваля, в котором число Маха равно
единице. Формула (12.3.11) дает связь между сечением сопла и числом Маха в
этом сечении.
Выше приведен приближенный расчет сопла Лаваля, в котором не
учитывалась вязкость среды. При использовании формулы (12.3.11) для
проведения оценочных расчетов значений чисел Маха в заданном сечении
сопла следует иметь в виду следующее обстоятельство. В его конструкции не
должно быть слишком резких изменений сечения в сверхзвуковой части, так как
поток газа в противном случае может и не следовать за стенкой, а может за счет
инерциальных сил оторваться от нее с образованием между стенкой и основным
потоком газа некоторой застойной (турбулентной) зоны. Точный расчет сопла
Лаваля с учетом вязкости очень сложен и громоздкий, поэтому чаще
конструкторы проводят оценочные расчеты методом проб и ошибок по
указанной выше формуле.
207
12.4. ИСТЕЧЕНИЕ ГАЗА ИЗ РЕЗЕРВУАРА ЧЕРЕЗ СУЖАЮЩИЙСЯ
НАСАДОК
Рассмотрим истечение газа из некоторого большого резервуара через
сужающийся насадок (рис. 12.2). Пусть параметры газа в сосуде при истечении
остаются неизменными, а скорость газа в сосуде вдали от входного сечения
равна нулю. Будем постепенно уменьшать давление газа на выходе из сопла,
оставляя параметры в резервуаре постоянными и равными P0 , T0 , ρ0 и c0 .
Очевидно, с уменьшением давления на выходе увеличивается скорость на срезе
сопла, причем она максимальная в самом узком
P*
сечении сопла, т.е. на его срезе. При некотором
P0
ρ*
критическом давлении может быть достигнута
ρ0
T*
скорость движения газа, равная местной критической
T0
c*
скорости звука c∗ . Для определения параметров газа
на
срезе
сопла
можно,
обратив
задачу,
воспользоваться формулами
(12.2.4)-(12.2.6),
Рис. 12.2
полученными для нахождения давления, плотности и
температуры в критической точке на обтекаемом теле, т.е. в точке полного
торможения потока. Следует различать параметры газа ρ0 , P0 , T0 в критической
точке на обтекаемом теле, в которой скорость газа равна нулю, и параметры
ρ* , P* , T* газа в той точке на линии тока, в которой скорость газа равна местной
скорости звука. В прежних обозначениях - это параметры p∞, ρ∞ и Т∞ . При
M ∗ = 1 параметры газа имеют соответствующие критические значения согласно
(12.2.4,5):
γ − 1⎞
⎛
P* = P∞ = P0 ⎜1 +
⎟
2 ⎠
⎝
γ
1− γ
,
γ − 1⎞
⎛
ρ* = ρ∞ = ρ0 ⎜1 +
⎟
2 ⎠
⎝
1
1− γ
,
−1
γ − 1⎞
⎛
T* = T∞ = T0 ⎜1 +
⎟ .
2 ⎠
⎝
(12.4.1)
При дальнейшем уменьшении давления на выходе из сопла давление,
плотность и температура газа на срезе сопла будут неизменными, зависящими
только от давления, плотности и температуры газа в резервуаре. Скорость,
равная критической скорости, будет зависеть только от температуры газа в
резервуаре:
2
2γ RT0
с* = с0
=
.
(12.4.2)
γ +1
γ +1 μ
208
Из формулы (12.4.1) следует,
что давление P∗ , плотность ρ∗ и
температура T∗ в критическом сечении насадка определяются через их значения
в покоящемся газе следующими соотношениями:
γ
1
P∗ ⎛ 2 ⎞ γ −1
ρ∗ ⎛ 2 ⎞ γ −1 T∗
2
⎟⎟ ,
⎟⎟ ,
.
(12.4.3)
= ⎜⎜
= ⎜⎜
=
P0 ⎝ γ + 1 ⎠
ρ0 ⎝ γ + 1 ⎠
T0 γ + 1
Например, для воздуха ( γ = 1,4 ) отношения критических параметров к их
значениям в покоящемся газе равны:
ρ∗
T
= 0.63, ∗ = 0.83 .
ρ0
T0
P∗
= 0.53,
P0
(12.4.4)
C физической точки зрения достижение значений критических
параметров очевидно, так как после достижения на срезе сопла критической
скорости, равной местной скорости звука, газ внутри резервуара и сопла “не
чувствует” изменения параметров за соплом, так как возмущения,
распространяющиеся со скоростью звука, не могут проникнуть внутрь сопла.
При этом расход газа через сопло достигает своего максимального значения,
которое не зависит от дальнейшего уменьшения противодавления на срезе
сопла, и определяется только давлением покоящегося газа в резервуаре.
При помощи имеющихся в нашем распоряжении формул можно
вычислить объемный максимальный расход газа через сопло:
1/ 2
QV макс = с*S мин
⎛ 2 ⎞
= S мин с0 ⎜⎜
⎟⎟
⎝ γ +1⎠
= S мин
2γ P0
2γ RT0
= S мин
. (12.4.5)
γ + 1 ρ0
γ +1 μ
Максимальный массовый расход можно вычислить по формуле:
1
QM макс = ρ•c• S мин
γ +1
1/ 2
⎛ 2 ⎞ γ −1 ⎛ 2 ⎞
= ρ 0 ⎜⎜
⎟⎟ с0 ⎜⎜
⎟⎟
⎝ γ +1⎠
⎝ γ +1⎠
S мин
⎛ 2 ⎞ 2 (γ −1)
γP0 ρ 0 . (12.4.6)
= S мин ⎜⎜
⎟⎟
⎝ γ +1⎠
Можно получить формулу для скорости истечения газа из резервуара
при промежуточных противодавлениях. Пользуясь уравнением Бернулли для
адиабатического движения газа и прежними обозначениями, имеем:
2 γ P0 ⎛
P ρ0 ⎞
υ2
с2
υ2
γ P
γ P0
⎟.
⎜⎜1 −
, υ2 =
+
= const =
+
=
γ − 1 ρ0 ⎝ P0 ρ ⎟⎠
2 γ −1
2 γ − 1 ρ γ − 1 ρ0
(12.4.7)
Из уравнения Пуассона для адиабатического течения имеем:
P
P
= const = 0γ ,
γ
ρ
ρ0
⎛ P0 ⎞
⎜ ⎟
⎝P⎠
1/ γ
=
ρ0
.
ρ
Подставляя отношение плотностей в предыдущее равенство, получим :
209
γ −1
⎛
⎞
2γ P0 ⎜ ⎛ P ⎞ γ ⎟
1− ⎜ ⎟
.
υ=
γ − 1 ρ 0 ⎜⎜ ⎜⎝ P0 ⎟⎠ ⎟⎟
⎝
⎠
(12.4.8)
Эту формулу называют формулой Сен-Венана-Вентцеля.
Из (12.4.8) видно, что при Р=Р0 скорость истечения равна нулю, а при
критическом перепаде давления Р=Р* из (12.4.8) следует:
υ = с0
2
= с* ,
γ +1
т.е. скорость движения газа на срезе сопла равна критической скорости.
При Р=0 скорость истечения равна:
υ=
2γ P0
2
= с0
= υ макс .
γ - 1 ρ0
γ -1
Значение скорости υ макс получается за срезом сопла. Таким образом,
максимальная скорость истечения может быть достигнута лишь при истечении
в вакуум (Р=0) при абсолютной температуре вытекающего газа, равной нулю.
Приведем указанные значения скоростей для воздуха (γ=1.4) при
T=300К:
c0 = 340м/с, υ макс = 756м/с, c∗ = 310м/с.
Тот факт, что расход газа через сужающийся насадок не зависит от
давления при его уменьшении ниже критического давления на срезе сопла (при
P < P∗ ), используется в технике для стабилизации расхода газа в различных
технологических и лабораторных устройствах. Сужающийся насадок чаще
всего выполняется в виде тонкой диафрагмы с отверстием, который называют
звуковой диафрагмой. Если давление воздуха за звуковой диафрагмой будет в 2
раза меньше давления перед диафрагмой, то дальнейшее уменьшение давления
P∗ за диафрагмой и его колебания не изменяют ни объемный, ни массовый
расход газа через нее при постоянном давлении перед диафрагмой.
210
12.5. ПОВЕРХНОСТИ РАЗРЫВА, УДАРНЫЕ ВОЛНЫ И СКАЧКИ
УПЛОТНЕНИЯ
12.5.1. Конус Маха
С физической точки зрения сверхзвуковое движение газа отличается от
дозвукового характером распространения малых возмущений в потоке.
Рассмотрим, как распространяются в движущемся потоке газа малые
возмущения. Предположим, что в некоторой точке дозвукового течения газа
возникло возмущение плотности газа. Это возмущение сносится вниз по потоку
и распространяется в движении с газом со скоростью звука во все стороны.
Если газ однороден, то поверхность
υ <c
распространения
возмущения
одинаковой фазы представляет собой
υ t2
ct1
поверхность шара, расширяющегося со
скоростью звука (рис. 12.3а). При этом
O O O2
1
возмущение при дозвуковом движении
υ t1
ct 2
газа распространяется как вниз, так и
вверх по потоку.
При сверхзвуковом движении газа
Рис.12.3а
возмущения, распространяющиеся со
скоростью звука, не могут проникнуть в
область течения вверх по потоку (рис. 12.3б), а сносятся потоком вниз по
течению.
Поверхность, ограничивающая область возмущения сверхзвукового
потока, представляет собой поверхность конуса, который называют конусом
Маха. Если движение газа прямолинейное, а газ однороден, то конус Маха
. ..
υ>c
ct 2
α
ct 1
υ t1
О1
υ t2
Рис.12.3 б
О2
211
будет прямым круговым конусом. Из
конуса определяется соотношением:
рисунка (12.3б) очевидно, что угол α
c 1
sin α = = .
υ M
(12.5.1)
Угол α называют углом Маха. Поверхность конуса Маха называют
характеристической поверхностью, а линии пересечения ее с плоскостью,
проходящей через ось конуса, называются характеристиками.
Из рассмотрения рисунков (12.3а, б) очевидно, что сверхзвуковой поток
набегает на обтекаемое тело (являющееся, в частности, источником
возмущения) ''вслепую''. Сверхзвуковой поток ''не предчувствует'' обтекаемое
тело. В дозвуковом потоке влияние тела сказывается вверх по течению, т.е.
дозвуковой поток ''чувствует'' обтекаемое тело значительно раньше, чем его
достигнет.
12.5.2. Поверхности разрыва. Законы сохранения
До сих пор изучалось движение среды, при котором скорости и
термодинамические параметры изменялись непрерывно, т.е. они были
непрерывными функциями координат и времени.
Однако в действительности имеют место такие движения, при которых
термодинамические параметры и скорости могут претерпевать разрыв
непрерывности. Разрыв непрерывности скоростей и термодинамических
параметров
происходит
на
некоторых
y
поверхностях, на которых они претерпевают
скачок.
Эти
поверхности
называют
поверхностями разрыва.
P1 , T1 , ρ1 , υ1
P2 , T2 , ρ2 , υ2
При
нестационарных
движениях
поверхности разрыва сами могут двигаться
υ2 y
υ2
относительно
тела,
возмущающего
x
υ2 x
покоящуюся среду, однако скорость их
υ
υ1 y
1
поверхность
движения не имеет ничего общего со
разрыва
скоростью движения частиц газа, которые
υ1x
могут при своем движении пересекать
Рис. 12.4
поверхности разрыва.
Поверхности
разрыва,
которые
перемещаются относительно обтекаемого тела, называют ударными волнами.
Поверхности разрыва, которые неподвижны относительно обтекаемого тела,
называют скачками уплотнения.
Рассмотрим малый участок поверхности разрыва, который можно
считать плоским, и свяжем с ним оси координат. В этой системе координат
212
поверхность
разрыва
покоится. Направим ось x по нормали к
рассматриваемому участку поверхности разрыва (рис. 12.4).
Из физических соображений следует, что на поверхности разрыва
должны соблюдаться определенные граничные условия, т.е. должны
выполняться законы сохранения:
1. На поверхности разрыва должен выполняться закон сохранения массы,
т.е. плотность потока вещества должна быть непрерывна:
ρ1υ1х = ρ2 υ2 х .
(12.5.2)
2. На поверхности разрыва должен выполняться закон сохранения
энергии, т.е. плотность потока энергии должна быть непрерывна. В разделе 1
было показано, что плотность потока энергии определяется вектором УмоваПойтинга (6.8.9), который для ньютоновской среды ( μ = 0 ) равен:
⎛ υ2
⎞
Ι k = ρυk ⎜⎜ + εвн + ε пот ⎟⎟ + qk − υi ∑ ik ,
⎝ 2
⎠
∑ ik = σ ik + σ~ik = − Pδik + σ~ik .
Так как рассматривается сверхзвуковое движение газа, то можно считать газ
идеальным. Пренебрегая потенциальной энергией и учитывая, что для
идеальной среды коэффициенты теплопроводности, динамической и объемной
вязкости равны нулю ( λ = η = ζ = 0 ), а, следовательно, плотность потока тепла
w
и тензор вязких напряжений также равны нулю ( qk = 0, σ ik = 0 ), получим:
⎛ υ2
⎞
⎛ υ2
⎞
I k = ρυk ⎜⎜ + εвн + PV ⎟⎟ = ρυk ⎜⎜ + h ⎟⎟ .
⎝ 2
⎠
⎝ 2
⎠
Непрерывность потока энергии
следующему соотношению:
на
поверхности
⎛ υ12
⎞
⎛ υ 22
⎞
ρ1υ1x ⎜⎜ + h1 ⎟⎟ = ρ 2υ 2 x ⎜⎜ + h2 ⎟⎟ .
⎝ 2
⎠
⎝ 2
⎠
разрыва
приводит
к
(12.5.3)
Соотношение (12.5.3) с учетом равенства (12.5.2) дает:
υ12
2
+ h1 =
υ 22
2
+ h2 ,
(12.5.4)
т.е. на поверхности разрыва выполняется уравнение Бернулли для
изоэнтропического движения.
3. На поверхности разрыва должен выполняться закон сохранения
количества движения, т.е. плотность потока импульса должна быть
непрерывна. Это означает, что плотность потока импульса с обеих сторон
поверхности разрыва должна быть одинакова; в противном случае на
поверхность разрыва будет действовать некоторая сила, которая должна вызвать
213
движение
этой
поверхности
в выбранной
системе
координат.
Плотность потока импульса и условие для него на поверхности разрыва имеют
вид:
П ik = ρυi υk − ∑ik ,
Равенство плотностей
соотношению(i=k=x):
потока
[Pδ
в
ik
+ ρυ iυ k ]1 = [Pδ ik + ρυ iυ k ]2 .
направлении
оси
x
приводит
P1 + ρ1υ12x = P2 + ρ 2υ 22x .
к
(12.5.5)
Равенство плотностей потоков импульсов в направлении осей y и z дает
следующие равенства:
i = x, k = y , ρ1υ1x υ1 y = ρ2 υ2 x υ2 y ,
i = x, k = z , ρ1υ1 x υ1 z = ρ2 υ2 x υ2 z .
(12.5.6)
Последние два соотношения с учетом (12.5.2) дают:
υ1 y = υ2 y ,
υ1z = υ2 z
(12.5.7)
Соотношения (12.5.7) свидетельствуют о том, что на поверхности
разрыва должны быть непрерывны касательные к ней скорости движения газа.
214
12.6. ПРЯМАЯ УДАРНАЯ ВОЛНА В СЖИМАЕМОМ ГАЗЕ
12.6.1. Ударная адиабата (адиабата Гюгоньо)
Рассмотрим движение газа, при котором линии тока перпендикулярны
поверхности разрыва. Поверхность разрыва называют прямой ударной
волной, если она перемещается по отношению к обтекаемому телу, а линии
тока перпендикулярны к ней. Если же поверхность разрыва неподвижна по
отношению к обтекаемому телу, то её называют прямым скачком
уплотнения.
Из (12.5.2,4,5) следует, что в прямой ударной волне или прямом скачке
уплотнения скорости газа и термодинамические параметры должны
удовлетворять следующим соотношениям:
ρ1υ1 x = ρ2 υ2 x ,
υ12
υ22
+ h1 =
+ h2 ,
2
2
P1 + ρ1υ12x = P2 + ρ2 υ22x .
(12.6.1)
По определению прямой ударной волны υ1 y = υ1z = 0 . Равенство
(12.5.7) свидетельствует о том, что и υ2 y = υ2 z = 0 . Следовательно, если линия
тока до прямой ударной волны перпендикулярна поверхности разрыва, то она
останется перпендикулярной и после нее, т.е. линия тока при прохождении
прямой ударной волны не испытывает излома. Поэтому в равенствах (12.6.1)
υ1x ≡ υ1 , а υ 2 x ≡ υ 2 и их можно записать в окончательном виде:
υ12
υ22
, P1 + ρ1υ12 = P2 + ρ2 υ22 .
ρ1υ1 = ρ2 υ2 , h1 +
= h2 +
2
2
(12.6.2)
Установим соотношение между термодинамическими параметрами и
скоростями в прямой ударной волне. Введем следующие обозначения:
ρ1υ1 = J 1 , ρ2 υ2 = J 2 ,
Vi =
1
ρi
, υ1 = J 1V1 , υ 2 = J 2V2 .
Из первого уравнения (12.6.2) имеем:
J1 = J 2 = J .
Воспользуемся третьим уравнением системы (12.6.2), умножив и разделив
вторые слагаемые в нем на ρ1 и ρ 2 , соответственно. Используя определение
плотности потока массы J 1 , можно записать:
P1 + J 2V1 = P2 + J 2V2 ,
P2 − P1 = J 2 (V1 − V2 ) ,
Из второго уравнения (12.6.2) следует:
J2 =
P2 − P1
.
V1 − V2
(12.6.3)
215
h2 − h1 =
J2 2
2
(V1 − V2 ) . (12.6.4)
2
P
Используя
определение
энтальпии h через скорость звука c,
2
это равенство можно преобразовать:
γ
α
( P2V2 − P1V1 ) =
1
γ −1
P1
.
1
= ( P2 − P1 )(V1 + V2 )
2
V1
V
(12.6.5)
Рис.12.5
Данное уравнение называют
уравнением ударной адиабаты или
уравнением адиабаты Гюгоньо. Это уравнение при известных
термодинамических параметрах набегающего потока P1 и V1 определяет
зависимость P2 = f (V2 ) за прямой ударной волной, представленную на (рис.
12.5). Угол между прямой, соединяющей точки 1 ( P1 , V1 ) и 2 ( P2 , V2 ), и осью V
на рис. 12.5 определяется соотношением:
tgα =
P2 − P1
= J2.
V1 − V2
(12.6.6)
12.6.2. Связь между скоростями и термодинамическими
параметрами в прямой ударной волне
Найдем связь между скоростями и термодинамическими параметрами
в прямой ударной волне в сверхзвуковом потоке сжимаемого идеального газа.
Если разделить уравнение ударной адиабаты (12.6.5) на P1 и V1, то, можно
определить
связь
удельных
P2/P1
объемов и давлений в прямой
γ −1
ударной волне.
γ +1
V2
P2
V1
=
,
V2
P1
( γ − 1) − ( γ + 1)
V1
− ( γ + 1) + ( γ − 1)
0
γ −1
−
γ +1
V2/V1
Рис. 12.6
P
( γ + 1) + ( γ − 1) 2
V2
P1
=
.
P2
V1
( γ − 1) + ( γ + 1)
P1
(12.6.7)
216
Как видно из (12.6.7), функция P2 / P1 = f (V2 / V1 ) является равнобочной
гиперболой с асимптотами (см. рис.12.6):
V2
P
γ −1
→ ∞, 2 → −
,
V1
P1
γ +1
P2
V
γ −1
.
→ ∞, 2 →
P1
V1
γ +1
(12.6.8)
Из уравнения состояния идеального газа следует:
P1V1 =
R
μ
T1 ,
P2V2 =
R
μ
P2
P1
T2 P2V2 P2
. (12.6.9)
=
= ⋅
P2
T1 P1V1 P1
( γ − 1) + ( γ + 1)
P1
( γ + 1) + ( γ − 1)
T2 ,
Р2
V
γ −1
равно:
→∞ и 2 →
Р1
V1
γ +1
Т2
γ − 1 P2
.
(12.6.9а)
→
Т1
γ + 1 P1
Предельное отношение температур при
Таким образом, при очень большом скачке давления скачок
температуры в ударной волне может быть сколь угодно большим. Однако
отношение плотностей стремится к некоторому постоянному пределу,
определяемому соотношением (см. 12.6.8):
V2 ρ1
γ +1
γ −1
(12.6.10)
=
→
ρ1 .
, ρ2 →
V1 ρ2
γ −1
γ +1
Для воздуха ( γ = 1.4 ) предельное значение плотности за прямой ударной
волной при P2 / P1 → ∞ равно ρ2 → 6 ρ1 .
Для скоростей можно получить следующие соотношения из первого
граничного условия (12.5.2) на поверхности разрыва:
⎛
P ⎞
P1 ⎜⎜ − 1 + 2 ⎟⎟
P1 ⎠
P − P1
2
υ12 = J 12V12 = V12 2
= V1 ⎝
.
V1 − V2
⎛ V2
⎞
V1 ⎜⎜ − + 1⎟⎟
⎝ V1
⎠
Если в этом определении использовать замену V2 /V1 согласно (12.5.2), то
γ −1+
υ12 = V1 P1
P2
(γ + 1) 2
⎤
P1
c ⎡
P
= 1 ⎢(γ − 1) + 2 (γ + 1)⎥ .
P1
2
2γ ⎣
⎦
Аналогичное выражение можно получить для υ2 :
(12.6.11)
217
2
⎡
⎤
P
γ + 1 + 2 (γ − 1)⎥
⎢
2
P
c12 ⎢⎣
⎥⎦
2
2 ⎛ V2 ⎞
υ2 = υ1 ⎜⎜ ⎟⎟ =
.
2
γ
V
⎤
⎡
P
⎝ 1⎠
2
(γ + 1)⎥
⎢(γ − 1) +
P1
⎦
⎣
(12.6.12)
Используя определение плотностей потоков массы и (12.6.3), для разности
скоростей получим соотношение:
⎛ P2
⎞
⎜⎜ − 1⎟⎟
⎝ P1
⎠
2
⎛P
⎞⎛ V ⎞
2
.
υ1 − υ2 = P1V1 ⎜⎜ 2 − 1⎟⎟⎜⎜1 − 2 ⎟⎟ = c1
P
V
γ
⎡
⎤
P
⎝ 1
⎠⎝
1 ⎠
2
⎢( γ − 1) + ( γ + 1) P ⎥
⎣
1⎦
(12.6.13)
В соответствии с (12.1.6) и (12.6.2) имеем:
υ2
+ h = const ,
2
γ
c2
h=
PV =
.
γ −1
γ −1
Тогда критические скорости до и после ударной волны можно определить
следующим образом:
υ12
c12
c12∗
c12∗
υ22
c22
c22∗
c22∗
γ +1
γ +1
2
.
+
=
+
= c1∗
=
+
=
+
= c22∗
2 γ −1 2 γ −1
2( γ − 1) 2 γ − 1 2 γ − 1
2( γ − 1)
Из данного соотношения следует, что
с1∗ = с2∗ = с∗ = с0
2
.
γ +1
(12.6.14)
Для изоэнтропического движения согласно уравнению Бернулли для
произвольных точек и точек полного торможения потока на линии тока
можно записать равенство:
υ2
υ12
+ с PT1 = c PT10 = 2 + с PT2 = c PT20 .
2
2
Из этого равенства следует, что температура торможения в прямой ударной
волне сохраняется, т.е.
T10 = T20 ,
(12.6.15)
218
Пользуясь вышеприведенными формулами можно доказать следующее
соотношение:
υ1υ 2 = c∗ .
2
(12.6.16)
Интересующие нас соотношения можно выразить через число Маха. Так из
формулы (12.6.12) можно получить следующее соотношение для давлений:
P2
2γ
γ −1
,
=
M 12 −
γ +1
P1 γ + 1
(12.6.17)
В свою очередь M 2 можно выразить через M 1 , пользуясь формулами
(12.6.12), (12.6.13) и (12.6.17):
2 + (γ − 1) M 12
M =
,
2 M 12γ − (γ − 1)
2
2
(12.6.18)
Отношение скоростей из (12.6.12, 13, 17) определяется по формуле:
υ2
2 + ( γ − 1) M 12
,
=
υ1 2 M 12 γ − ( γ − 1)
(12.6.19)
Наконец, пользуясь формулой (12.6.16), из последнего соотношения имеем:
υ
M 1* = 1 ,
c*
( γ + 1) M 12
,
M =
2 + ( γ − 1) M 12
2
1∗
M 2* =
υ2
,
c*
M 2* =
υ2
M 1* .
υ1
(12.6.20)
219
12.7.УДАРНЫЕ ВОЛНЫ СЛАБОЙ ИНТЕНСИВНОСТИ
12.7.1. Изменение термодинамических параметров и скоростей в
прямой ударной волне
Для определения направления изменения термодинамических
параметров и скоростей в ударной волне рассмотрим ударные волны слабой
интенсивности, т.е. будем полагать, что, например, изменение давления в
ударной волне незначительно:
(P2 − P1 )
P1 << 1 .
Из законов сохранения в прямой ударной волне следует, что при
прохождении газа через нее, изменяются скорость и давление, а,
следовательно, изменяется и энтропия идеального газа. Будем предполагать,
что за счет изменения давления и энтропии изменяются энтальпия и
удельный объем при прохождении газом прямой ударной волны, т.е.
h = h( P, S ),
V = V ( P, S ) .
Представим энтальпию h2 после ударной волны в виде ряда Неймана
около ее значения h1 перед ударной волной (в состоянии 1):
1 ⎛ ∂ 2h ⎞
⎛ ∂h ⎞
⎛ ∂h ⎞
2
h2 = h1 + ⎜ ⎟ (P2 − P1 ) + ⎜ ⎟ (S 2 − S1 ) + ⎜⎜ 2 ⎟⎟ (P2 − P1 ) +
2 ⎝ ∂P ⎠ S1
⎝ ∂S ⎠ P1
⎝ ∂P ⎠ S1
1 ⎛ ∂2h ⎞
1 ⎛ ∂ 3h ⎞
3
2
+ ⎜⎜ 2 ⎟⎟ (S 2 − S1 ) + ⎜⎜ 3 ⎟⎟ (P2 − P1 ) + ...
2 ⎝ ∂S ⎠ P1
6 ⎝ ∂P ⎠ S1
. (12.7.1)
Ограничимся в ряду (12.7.1) слагаемыми третьего порядка малости по
(P2 − P1 ) , и в последующих выражениях будем пренебрегать слагаемыми,
пропорциональными ( S 2 − S1 ) 2 и (S 2 − S1 )(P2 − P1 ) . Аналогично удельный
объем после прямой ударной волны представим в виде ряда:
1 ⎛ ∂ 2V ⎞
⎛ ∂V ⎞
⎛ ∂V ⎞
2
⎜⎜ 2 ⎟⎟ (P2 − P1 ) + ... .(12.7.2)
(
)
(
)
V2 = V1 + ⎜
P
P
S
S
−
+
−
+
⎟
⎜
⎟
2
1
2
1
2 ⎝ ∂P ⎠ S1
⎝ ∂P ⎠ S1
⎝ ∂S ⎠ P1
Вспомним следующие термодинамические соотношения:
dh = TdS + VdP ,
⎛ ∂h ⎞
⎜ ⎟ = V1 ,
⎝ ∂P ⎠ S1
⎛ ∂ 2h ⎞
⎛ ∂V ⎞
⎜⎜ 2 ⎟⎟ = ⎜
⎟ ,
∂
∂
P
P
⎝
⎠ S1
⎝
⎠ S1
⎛ ∂h ⎞
⎜ ⎟ = T1 , .
⎝ ∂S ⎠ P1
⎛ ∂ 3h ⎞
⎛ ∂ 2V ⎞
⎜⎜ 3 ⎟⎟ = ⎜⎜ 2 ⎟⎟ .
⎝ ∂P ⎠ S1 ⎝ ∂P ⎠ S1
(12.7.3)
220
Подставляя (12.7.1,2) в уравнение ударной адиабаты (12.6.5), и
используя (12.7.3), получим:
S 2 − S1 =
1 ⎛ ∂ 2V
⎜
12T1 ⎜⎝ ∂P 2
⎞
⎟⎟ ( P2 − P1 ) 3 .
⎠ S1
(12.7.4)
Из (12.7.4) следует, что скачок энтропии в ударной волне является
величиной третьего порядка малости по отношению к скачку давления.
Соотношение (12.7.4) замечательно тем, что оно указывает на изменение
энтропии в ударной волне в идеальном газе, лишенном трения и
теплопроводности. Следовательно, ударные волны являются еще одним
механизмом (наряду с трением и теплопроводностью) возрастания энтропии
в движущихся идеальных сжимаемых газах.
⎛ ∂ 2V ⎞
Во всех известных случаях производная ⎜⎜ 2 ⎟⎟ положительна, и для
⎝ ∂P ⎠ S
1
идеального газа при изоэнтропическом движении, описываемом уравнением
Пуассона, она равна
⎛ ∂ 2V
⎜⎜ 2
⎝ ∂P
⎞
γ +1
⎟⎟ = 2
.
2
⎠ S1 P1 ρ1γ
Поскольку энтропия может лишь возрастать ( S2 > S1 ), то поэтому из
соотношения (12.7.4) следует:
P2 > P1 .
Из определения J 2 =
P2 − P1
можно сделать вывод, что:
V1 − V2
V1 > V2 ,
ρ2 > ρ1 .
Из граничных условий ρ1υ1 = ρ2 υ2 можно заключить:
υ2 < υ1 .
Из уравнения ударной адиабаты (12.6.5) или уравнения Бернулли (второе
уравнение в 12.6.2) можно прийти к следующему выводу:
h2 > h1 ,
c PT2 > c P T1 ,
T2 > T1 .
Поскольку скорость звука зависит только от температуры, то имеем:
с= γ
RT
,
μ
c2 > c1 .
Из определения скорости звука следует:
221
⎛ ∂P ⎞
⎛ ∂P ⎞
с1 = ⎜⎜ ⎟⎟ = − V12 ⎜
⎟ ,
∂
V
∂
ρ
⎝
⎠ S1
⎝ ⎠ S1
⎛ ∂P ⎞
c2 = − V22 ⎜
⎟ .
∂
V
⎝
⎠ S2
(12.7.5)
Скорости движения газа в ударной волне могут быть определены из
равенства плотностей потока на поверхности разрыва (12.6.2), (12.6.3) и
(12.6.6):
υ1 = JV1 = V12
P2 − P1
= V12tgα ,
V1 − V2
υ2 = V22 tgα .
(12.7.6)
На графике ударной адиабаты P2 = f (V2 ) (рис. 12.5) видно, что производная
(∂P / ∂V ) S в точках ( P1 ,V1 ) и ( P2 ,V2 ) различны. Из сравнения (12.7.5) и (12.7.6)
приходим к заключению:
⎛ ∂P ⎞
⎛ ∂P ⎞
−⎜
⎟ < tgα , − ⎜
⎟ > tgα , υ1 > c1 , M 1 > 1 , υ2 < c2 , M 2 < 1 .
⎝ ∂V ⎠ S1
⎝ ∂V ⎠ S2
(12.7.7)
Как видно из (12.7.7), для образования ударная волна необходимо, чтобы газ
до ударной волны двигался со сверхзвуковой скоростью. Следовательно, в
газе, прошедшем прямую ударную волну, не могут существовать новые
ударные волны.
Таким образом, в прямой ударной волне выполняются следующие
неравенства для скоростей и термодинамических параметров:
S 2 > S1 , P2 > P1 , V2 < V1 , ρ 2 > ρ 1 , T2 > T1 , c 2 > c1 , υ2 < υ1 , υ1 > c1 , υ2 < c2 ,
с1∗ = с 2∗ , T10 = T20 .
В газе, прошедшем прямую ударную волну, возрастают энтропия, давление,
плотность и температура, уменьшаются лишь удельный объем и скорость
движения газа, становясь дозвуковой.
До сих пор рассматривали неподвижную прямую ударную волну или
скачок уплотнения. Если на рассматриваемое движение наложить скорость
υ1 , направленную справа налево (рис. 12.6), то газ в области 1 окажется
неподвижным относительно наблюдателя, а ударная волна будет двигаться
справа налево со скоростью υ1 , за ударной волной в области 2 газ будет
двигаться справа налево со скоростью υ1 − υ2 = υСП - скоростью спутного
потока. Из формулы (12.6.11) следует, что скорость движения плоской
ударной волны тем больше, чем интенсивнее волна, т.е. чем больше
отношение давлений P2 / P1 .
222
12.7.2. Образование ударных волн
Образование прямой ударной волны с физической точки зрения можно
понять, рассматривая следующий опыт. Пусть имеется некоторая бесконечная
труба с газом, на одном конце которой расположен подвижный поршень
(рис. 12.7). Пусть в некоторый момент времени поршень внезапно начинает
двигаться с некоторой скоростью, а дальше продолжает двигаться со
скоростью спутного потока. Тогда в первоначальный момент времени перед
поршнем образуется уплотнение газа. Примерный график изменения
плотности в трубе в этот момент изображен на рис. 12.7.
Разделим этот уплотненный участок газа на тонкие элементарные
слои. Поскольку более интенсивное уплотнение распространяется в газе с
большей скоростью, то в процессе движения более
1
2
плотные задние слои будут догонять менее плотные
передние слои, и в последующий момент t1 график
ρ − ρ 0 = f ( x ) будет иметь более крутой вид. При
υ2
υ1
дальнейшем движении крутизна увеличивается, и в
конце концов возникнет разрыв, имеющий очень
υ1
малую толщину и двигающийся слева направо со
скоростью υ1 , т.е. возникнет ударная волна. За
Рис. 12.6
ударной волной газ будет двигаться со скоростью
спутного потока υсп = υ1 − υ2 . Таким образом, ударные волны являются
самоформирующимися образованиями в газе. Не очень резко ограниченное
уплотнение в газе по мере движения автоматически переходит в резко
ограниченную ударную волну. Очевидно, что толщина поверхности разрыва
x
υ0 = 0, P0 , ρ0 , T0
ρ − ρ0
t 1 >t 0
t
0
0
x
Рис. 12.7
223
термодинамических параметров и скоростей в прямой ударной волне должна
быть порядка нескольких длин свободного пробега молекул газа. При
последующем движении ударной волны в реальном газе ударная волна
“размывается” и исчезает вследствие диссипации её кинетической энергии в
окружающее пространство за счет вязких сил.
Если поршень резко сместить влево, то в начальный момент времени
перед ним возникнет разрежение. Это разрежение будет в дальнейшем
распространяться вправо. Однако те же рассуждения показывают, что в этом
случае не происходит самоформирования резкого перехода между
невозмущенным газом и областью разрежения. Наоборот, более или менее
резкое возмущение - разрежение газа в начале движения поршня при
дальнейшем движении “расползается”, занимая постепенно все большую и
большую область пространства трубы. Это значит, что ударные волны
разрежения, т.е. резкие переходы, при которых в газе после их прохождения
давление уменьшается, существовать не могут. То же самое можно показать,
пользуясь уравнением ударной адиабаты (12.6.5). Точки ударной адиабаты
(рис. 12.5) правее точки ( P1 ,V1 ), которые соответствовали бы ударной волне
разрежения ( P2 < P1 ) нереальны, т.к. они соответствуют такому процессу, при
котором энтропия бы уменьшалась (см.(12.7.4)).
12.7.3.Численный пример
Рассмотрим численный пример. Оценим параметры ударной волны,
образующейся при взрыве атомной бомбы. При взрыве атомной бомбы
образуется сферическая или полусферическая ударная волна. Вдали от
эпицентра взрыва участок сферической ударной волны можно приближенно
рассматривать как плоский и для расчетов пользоваться полученными выше
формулами для плоской ударной волны. Интенсивность волны
характеризуют отношением давлений P2 / P1 . Эксперимент показывает, что
при взрыве мегатонной бомбы на расстоянии 2,5-5 километров от эпицентра
взрыва P2 / P1 ≈ 2 . Скорость звука в неподвижном воздухе (γ = 1) при
нормальных условиях равна с1 =340м/сек.
Вычислим скорость движения ударной волны υ1 . Из формулы
(12.6.11) имеем:
υ1 = с1
⎤
1 ⎡
(γ − 1) + P2 (γ + 1)⎥ ≈ c1 0,4 + 4,8 = c1 5,2 ≈ 1,35c1 .
⎢
P1
2γ ⎣
2,8
2,8
⎦
Таким образом, скорость распространения ударной волны в полтора
раза больше, чем скорость звука в неподвижном газе. Поэтому наблюдатель
224
сначала обнаружит ударную волну, а уж затем услышит звук взрыва.
Причем, скорость распространения ударной волны тем больше, чем больше
P
ее интенсивность, т.е. чем больше отношение 2 .
P1
Найдем скорость υ 2 , необходимую для вычисления скорости спутного
движения воздуха за ударной волной. Согласно (12.6.12) имеем:
(γ + 1) + P (γ − 1)
2
υ 2 = с1
P1
⎡
⎤
P
2γ ⎢(γ − 1) + 2 (γ + 1)⎥
P1
⎣
⎦
= c1
2,4 + 0,8
= 0,84c1 .
2,8(0,4 + 4,8)
Скорость спутного потока газа за ударной волной равна:
υ сп = υ1 − υ 2 = (1,35 − 0,84)с1 ≈ 0,5с1 = 170 м / c .
Таким образом, воздух за ударной волной движется с ураганной
скоростью, производя большие разрушения. Найдем температуру воздуха за
ударной волной, если температура неподвижного воздуха T1 = 300 K . То
согласно (12.6.9) с использованием уравнения непрерывности на границе
раздела можно получить:
T2 P2 V2 P2 υ 2
0,84
=
=
≈2
= 1,244 ,
1,35
T1 P1 V1 P1 υ1
T2 = 1,244T1 = 1,244 ⋅ 300 = 373K
Таким образом, объекты, подвергающиеся воздействию ударной
волны, не только испытывают резкий, воспринимаемый как удар, перепад
давления при ее прохождении ( P2 / P1 = 2 ), но также могут разрушиться и
даже при больших (Р1 /Р2) возгораться под воздействием горячего (~100 o C)
ураганного ветра (~170м/c), создаваемого спутным потоком, движущимся
вслед за ударной волной. Вблизи эпицентра взрыва к тепловому воздействию
ударной волны добавляется еще тепловое излучение от вспышки.
Разбегающийся с большой скоростью от эпицентра взрыва воздух
создает около него область очень низкого давления. Поэтому спустя
некоторое время после прохождения ударной волны воздух устремляется по
поверхности Земли обратно к эпицентру, неся с собой много пыли. Этот
запыленный нагретый воздух, устремляясь вверх, и создает тот “гриб”,
который характерен для наземных ядерных взрывов.
225
12.8. КОСАЯ УДАРНАЯ ВОЛНА
12.8.1. Уравнение ударной поляры
Рассмотрим общий случай, когда линии тока в набегающем потоке не
перпендикулярны ударной волне (рис. 12.8).
y
υ1t = υ 2t
A1
υ 2t
B1
B
υ1n
υ2y
r
υ1
ϕ
A
υ2
υ 2n
C
χ
υ2x B
2
x
υ1t
A2
ударная волна
Рис. 12.8
Такую волну называют косой ударной волной. Направим ось x по
линии тока в набегающем потоке. Разложим скорость набегающего потока на
перпендикулярную и касательную к ударной волне компоненты скорости.
Так как тангенциальная компонента скорости движения газа в ударной
волне непрерывна, а нормальная компонента после прохождения ударной
волны (прямая ударная волна) уменьшается, то, следовательно, линия тока
после прохождения косой ударной волны поворачивает, приближаясь к
ударной волне. Очевидно, для нормальных компонент скорости справедливы
все те соотношения, которые мы ввели для прямой ударной волны.
Обозначим угол между осью x и косой ударной волной через ϕ , а угол
поворота через χ . Тогда из условия непрерывности тангенциальной
компоненты скорости имеем:
υ1t = υ 2 t ,
υ1 cosϕ = υ 2 x cosϕ + υ 2 y sin ϕ ,
ctgϕ =
υ2y
.
υ1 − υ 2 x
(12.8.1)
226
По аналогии с прямой ударной волной согласно (12.6.19) для
отношения нормальных компонент скоростей можно записать:
υ 2 n 2 + (γ − 1) M 12n
=
,
υ 1n
(γ + 1) M 12n
υ1n = υ1 sin ϕ ,
M 1n =
υ 1n
c1
.
(12.8.2)
υ 2 n = υ 2 x sin ϕ − υ 2 y cosϕ .
Из соотношений (12.8.2) имеем:
υ 2 x sin ϕ − υ 2 y cos ϕ
2c12
γ −1
,
=
+
υ1 sin ϕ
(γ + 1)υ12 sin 2 ϕ γ + 1
sin 2 ϕ =
1
. (12.8.3)
1 + ctg 2ϕ
Последнее соотношение можно записать в следующем виде:
−
ctg 2ϕ =
υ2x γ −1
2c12
+
−
(γ + 1)υ12 υ1 γ + 1
.
2 c12 υ1 − υ 2 x
+
γ + 1 υ12
υ1
(12.8.4)
Если умножить числитель и знаменатель (12.8.4) на υ1 , а также вычесть и
прибавить в числителе υ1 , получим следующую формулу:
c12 ⎞
2 ⎛
⎜⎜υ1 − ⎟⎟ − (υ1 − υ 2 x )
2
υ
+
γ
υ1 ⎠
1
⎞
⎛
2y
⎝
⎟⎟ =
ctg 2ϕ = ⎜⎜
.
2
c
2
υ
υ
−
1
2x ⎠
⎝ 1
υ1 − υ 2 x +
γ + 1 υ1
(12.8.5)
Таким образом, окончательно имеем следующее уравнение:
υ 22y
c2 ⎞
2 ⎛
⎜⎜υ1 − 1 ⎟⎟ − (υ1 − υ2 x )
γ + 1⎝
υ1 ⎠
.
= (υ1 − υ2 x ) 2 ⋅
2 c12
⋅
υ1 − υ2 x +
γ + 1 υ1
υ12
с12
с∗2
с∗2
γ +1
,
+
= +
= с∗2
2 γ −1 2 γ −1
2(γ − 1)
с12 = с∗2
γ +1
2
(12.8.6)
− υ12
γ −1
2
.
(12.8.7)
После подстановки (12.8.7) в (12.8.6) получим:
υ 22y = (υ1 − υ 2 x )
υ1υ 2 x − c∗2
2
2 2
c − υ 2 xυ1 +
υ1
γ +1
2
∗
.
(12.8.8)
227
При заданных υ1 и c∗ функция υ 2 y = f (υ 2 x ) представляет собой уравнение
строфоиды и имеет вид, изображенный на рис. 12.9.
υ2y
D
υ 2n
υ1t = υ 2t
ϕ=β
υ1n
K
υ2y
υ2
ϕ
c∗
0
χ
C1
υ2x
A
υ 2⊥
B
υ2x
υ1
Рис. 12.9
Обозначим точки пересечения строфоиды с осью x через А и В.
Очевидно, что радиус-вектор, проведенный из начала координат в любую
точку С строфоиды представит скорость υ 2 , т.к. υ 2 = υ 22x + υ 22y . Угол,
составляемый этим вектором и осью υ 2 x , будет углом поворота потока χ
после косой ударной волны. Координаты точек А и В могут быть определены
из условия υ 2 y = 0 . Приравнивая нулю левую часть уравнения (12.8.8), для
координат точек А и В получим следующие значения. Двойная точка
2
пересечения В из условия (υ1 − υ 2 x ) = 0 очевидно имеет координаты:
(υ )
2x
= υ1 .
B
Координаты точки А следуют из равенства нулю числителя (12.8.8):
υ1υ 2 x −c = 0 ,
2
∗
υ2x =
c∗2
υ1
.
Но для прямой ударной волны согласно (12.6.16) c∗2 = υ1υ 2 , поэтому имеем:
(υ )
2x
A
= υ 2⊥ .
Таким образом, точки А и В ударной поляры определяют скорости в
прямой ударной волне. Точки строфоиды за точкой В нереальны, т.к.
228
соответствовали бы условиям в ударной волне, при которых υ 2 > υ1 , что
невозможно. Проведем прямую через точки В и С и опустим из точки С
перпендикуляр на ось υ 2 x . Обозначим угол ВСС 1 через β , тогда из рис. 12.9,
согласно (12.4), следует:
ctgβ =
υ2y
= ctgϕ ,
υ1 − υ 2 x
β =ϕ .
Следовательно, угол β равен углу наклона косой ударной волны к
скорости набегающего потока. Далее из рис.12.9 следует:
OD = υ 1 cos ϕ = υ 1t = υ 2 t ,
BD = υ 1 sin ϕ = υ 1n ,
DC = υ 2 sin (ϕ − χ ) = υ 2 n .
12.8.2. Максимальный угол поворота потока
При увеличении числа М 1 за счет увеличения скорости набегающего
потока υ1 , точка В передвигается вправо, а точка А влево, т.к. υ1υ 2 = c∗ .
Поэтому ударные поляры для меньших М 1 располагаются внутри ударных
поляр, построенных для больших М 1 . Найдем уравнение ударной поляры
при М 1 → ∞ . При этом ”критическое” число Маха имеет следующее
предельное значение согласно (12.5):
2
М
2
1∗
(γ + 1)М
=
2 + (γ − 1)М
2
2
1
2
1 М 1 →∞
γ +1
γ + 1 ⎛ υ1 ⎞
= υ12мах , (12.8.9)
, υ12 = с∗2
=
= ⎜⎜ ⎟⎟
γ −1
γ − 1 ⎝ с∗ ⎠ М → ∞
υ2 y
Подставляя
полученные
в
предельные
значения
υ1
уравнение
ударной
поляры
(12.8.8), получим:
K
0
χ max
A
1
B
⎞⎛
⎛
γ +1
γ −1 ⎞
⎟
υ 22y = ⎜⎜ c∗
− υ 2 x ⎟⎟⎜⎜υ 2 x − c∗
⎟
γ
1
γ
1
+
−
⎠
⎠⎝
⎝
.(12.8.10)
Рис. 12.10
Уравнение (12.8.10) представляет
собой уравнение окружности
(рис.12.10) радиусом R, равным:
1
1
1 ⎛ γ +1
γ −1 ⎞
⎟.
R = (OB − OA) = ((υ 2 x )B − (υ 2 x )A ) = c∗ ⎜⎜
−
2
2
2 ⎝ γ −1
γ + 1 ⎟⎠
Т.е. при М 1 → ∞ строфоида вырождается в окружность. Окружность
пересекает ось υ 2 x в точках А и В, имеющих координаты соответственно:
229
(υ )
2x
A
= c∗
γ −1
= OA ,
γ +1
(υ )
2x
B
γ +1
= OB .
γ −1
= c∗
Касательная, проведенная к окружности из начала координат, имеет
угол с осью υ 2 x , определяемый соотношением:
sin (∠BOK ) =
R
1
= .
R + OA γ
По определению, угол ВОК является максимально возможным углом
поворота потока χ max в косой ударной волне, достигаемый только при
бесконечном числе Маха в набегающем потоке. Для воздуха γ = 1,4002 ,
тогда:
sin χ max =
1
γ
=
1
, χ max = 45o .
1,4002
(12.8.11)
Таким образом, для воздуха поток, прошедший косую ударную волну,
нельзя повернуть на угол, больший, чем 45 o .
12.8.3. Изменение скорости за косой ударной волной
Рассмотрим изменение скорости за косой ударной волной, при
заданном М 1 , при изменении угла χ (рис. 12.11).
Если точка С приближается к точке В, то при этом υ 2 x стремится к υ1 .
Скачок скорости уменьшается и косая ударная волна в пределе переходит в
слабый разрыв - в слабую ударную звуковую волну. Однако при этом угол ϕ
имеет конечное значение ϕ = ϕ К . Это значение ϕ можно определить из
уравнения для ctg 2ϕ (12.8.5):
⎛ υ2y
⎜⎜
⎝ υ1 − υ 2 x
2
⎞
1
⎟⎟ = ctg 2ϕ =
−1 =
2
sin
ϕ
⎠
c12
2 ⎛
⎜υ 1 −
γ + 1 ⎜⎝
υ1
υ1 − υ 2 x
⎞
⎟⎟ − (υ1 − υ 2 x )
⎠
.
2 c12
+
γ + 1 υ1
(12.8.12)
При υ 2 x → υ1 имеем:
ctg ϕ
2
υ 2 x →υ1
υ12
1
=
−1 → 2 −1,
c1
sin 2 ϕ
sin ϕ →
1
= sin α ,
M1
ϕ → α .(12.8.13)
Таким образом, действительно убеждаемся, что слабая косая ударная волна
(звуковая волна), как и следовало ожидать, распространяется под углом Маха.
230
υ2y
D
.
K
ϕ
c∗
0
.
С
υ2
χ
υ2x
A
.
B
υ2x
υ2
υ1
Рис. 12.11
При перемещении точки С к точке А скорость υ 2 за косой ударной
волной уменьшается и после прохождения точки К становится дозвуковой.
При этом угол ϕ монотонно увеличивается и, наконец, в точке А угол ϕ
становится равным 90 o , что соответствует прямой ударной волне. Из
соотношения (12.8.12) для ctg 2ϕ при υ 2 x = υ 2 ( ϕ = 90 o ) немедленно следует
формула (12.6.19), полученная для прямой ударной волны:
υ 2 2 + (γ − 1) M 12
=
.
υ1
(γ + 1) M 12
(12.8.14)
На рис. 12.11 видно, что если угол ϕ при перемещении точки С от
точки В к точке А растет монотонно, то угол χ достигает некоторого
максимального значения в точке К (в точке К υ 2 ≈ с∗ ), а затем начинает
убывать. Точка К делит ударную поляру на две части. Часть ВК, для которой
υ 2 > c∗ и часть КА, в точках которой υ 2 < c∗ , причем точка К почти в точности
совпадает с точкой касания касательной, проведенной к поляре из начала
координат. Следовательно, для точек поляры ВК скорость газа, прошедшего
косую ударную волну остается сверхзвуковой, а для точек КА скорость газа
после косой ударной волны становится дозвуковой.
Точки части поляры ВК называют точками слабого семейства, а
точки части поляры КА точками сильного семейства ударных волн.
Заданному углу χ на ударной поляре всегда (кроме точки К) соответствует
231
две точки, из которых одна принадлежит слабому, а другая сильному
семейству. Опыт показывает, что в действительности реализуются лишь
точки слабого семейства ударных волн. Точки сильного семейства никогда не
реализуются, кроме как в прямой ударной волне (точка А). По-видимому,
ударные волны, соответствующие точкам сильного семейства, кроме точки А,
неустойчивы. Поэтому за косой ударной волной скорость потока газа
остается сверхзвуковой (υ 2 > c∗ ), и в нем могут образовываться еще косые
или прямые ударные волны.
12.8.4. Обтекание клина сверхзвуковым потоком
υ1τ
Рассмотрим
обтекание
сверхзвуковым потоком газа плоского
A
клина (рис. 12.12). Пусть заданы υ1 и М 1 .
M 1 > 11 υ1n
Необходимо найти угол косой ударной
ϕ
υ1 > c1
χ
волны. Для практических расчетов
параметров
косой
ударной
волны
0
существуют
номограммы,
которые
представляют собой ударные поляры,
A1
вычисленные для различных М 1 . Они
изображены в виде строфоид, вложенных
одна в другую. Причем, строфоида,
Рис. 12.12
построенная
для
меньшего
М1,
расположена внутри строфоиды для большего М 1 . При заданных υ1 и М 1
поток должен повернуть вдоль поверхности клина ОА, поэтому известен
также угол поворота потока χ .
Выберем на номограмме строфоид для различных чисел Маха
заданную строфоиду для (М1)2 и ближайшие к ней (рис.12.13). Проводем из
начала координат прямую под углом χ, которая пересекает ударную поляру
для (М1)2 в двух точках. Выберем точку С слабого семейства. Отрезок ОС
определяет скорость υ 2 за косой ударной волной. Проводя секущую через
точки В и С и опуская на нее перпендикуляр из начала координат, получаем
угол ϕ между этим перпендикуляром и осью υ 2 x , или угол косой ударной
волны.
υ1
232
υ2y
( М 1 )1 < ( M 1 ) 2 < ( M 1 ) 3
D
C
ϕ
χ
B
υ2x
(М 1 )1
0
(М 1 ) 2
(M 1 ) 3
υ1
Рис.12.13
В прямой ударной волне отношение давлений P2/P1 определяется по
формулу (12.6.17):
P2
γ −1
2γ
.
=
M 12n −
P1 γ + 1
γ +1
(12.8.14)
Для косой ударной волны в (12.17) необходимо вместо М1 подставить М1n ,
определяемое нормальной составляющей набегающего потока υ1n (см.
(12.8)), тогда аналогичное уравнение имеет следующий вид:
М 1n =
υ 1n
c1
,
υ1n = υ1 sin ϕ .
2γ υ12
γ − 1 2γ
γ −1
P2
.
=
sin 2 ϕ −
=
M 12 sin 2 ϕ −
2
γ +1 γ +1
γ +1
P1 γ + 1 c1
(12.8.15)
Отношение остальных термодинамических величин может быть получено из
введенных выше формул (12.6.7), (12.6.9) с использованием (12.8.15)
P2
(γ − 1)
V2 ρ 1
P1
=
=
,
P2
V1 ρ 2
γ − 1 + (γ + 1)
P1
γ +1+
T2 P2 V2
.
=
T1 P1 V1
(12.8.16)
Из сравнения формул (12.8.15) и (12.8.16) видно, что при заданном
М 1 скачок давления в косой ударной волне всегда меньше, чем скачок
давления в прямой ударной волне на sin 2 ϕ . Также меньше скачки и для
233
других термодинамических величин, в том числе и энтропии. Скорость газа
за косой ударной волной тоже изменяется меньше, чем в прямой, оставаясь
сверхзвуковой.
Можно при заданном (М 1 ) 2 увеличивать угол
раствора клина χ до некоторого наибольшего значения
χ наиб , соответствующего касанию вектора скорости υ 2 к
строфоиде. При дальнейшем увеличении χ > χ наиб вектор
скорости υ 2 не пересекается с ударной полярой,
построенной для выбранного (М 1 ) 2 . В этом случае, как
Рис. 12.14
показывает
опыт,
перед
клином
образуется
отсоединенная ударная волна (рис. 12.14).
Если увеличить число (М 1 ) 2 до (M 1 )3 , то состояние газа за косой
ударной волной будет описываться ударной полярой, соответствующей
(М 1 )3 > (M 1 )2 . вектор скорости υ 2 может пересечься с этой ударной полярой.
Это означает, что косая ударная волна снова будет ”посажена” на носик
клина.
Если при заданном (М 1 )3 снова увеличить угол раствора клина χ , то
может оказаться, что вектор скорости υ 2 не пересечется с ударной полярой
( M 1 ) 3 > M 2 . В этом случае косая ударная волна опять «отойдет» от носика
клина, т.е. снова образуется отсоединенная ударная волна. И так далее. Повидимому, это рассуждение можно продолжить до тех пор, пока угол
раствора клина не достигнет максимального значения:
sin χ max =
1
γ
.
Для клина, имеющего угол раствора χ > χ max даже при бесконечном
числе Маха ударная волна воегда отсоединенная (для воздуха χ max ≈ 45o ). Для
тупого тела ударная волна всегда отсоединенная.
Отсоединенную ударную волну
M 1 < 1M < 1
можно
рассматривать
как
волну,
1
содержащую
участки
прямой
и
последовательной серии косых ударных
волн. Так, участок отсоединенной
М1 > 1
M1 > 1
ударной волны перед самым носиком
клина можно рассматривать как прямую
ударную волну. Поскольку скачек
Рис.12.15
Рис.12.15
давления в прямой ударной волне при
заданном М 1 больше, чем в косой, то и лобовое сопротивление клина
больше, чем оно было бы при косой присоединенной ударной волне. Поэтому
для снижения сопротивления тел в сверхзвуковом потоке необходимо
234
стремиться к тому, чтобы перед обтекаемым телом не образовывалось
отсоединенных ударных волн. При заданном числе М 1 это можно сделать
только уменьшением угла раствора клина. Таким образом, хорошо
обтекаемые тела в сверхзвуковом потоке должны иметь острую переднюю
кромку в отличие от удобообтекаемого дозвукового профиля (рис. 12.15).
С образованием ударных волн связан и так называемый звуковой
барьер. При достижении самолетом с дозвуковым профилем крыла скорости,
равной скорости звука, на передних кромках
r
υ
обтекаемых частей самолета образуются
υ
υn τ
прямые ударные волны, что приводит к резкому
увеличению сопротивления, а это, в свою
очередь, резко увеличивает нагрузки на
различные элементы конструкции самолета.
Увеличение сопротивления ведет к снижению
скорости самолета до дозвуковой. Уменьшение
же дозвуковой скорости ведет к снижению
Рис. 12.16
сопротивления. При той же мощности
двигателей самолет снова разгоняется и достигает звуковой скорости и т.д.
Таким образом, самолет, увеличивая скорость, как бы постоянно
«натыкается» на некоторый барьер, для преодоления которого необходимы
более мощные двигатели и достаточно прочная конструкция самолета.
С той же целью уменьшения сопротивления крылья современных
самолетов делаются стреловидными (рис. 12.16). Действительно, при
заданной скорости полета скорость потока, набегающего на крыло, можно
разложить на касательную и нормальную составляющие к передней кромке
крыла. При этом нормальная составляющая, ответственная за образование
ударной волны на крыле, окажется, конечно, меньше скорости набегающего
потока на косинус угла стреловидности.
Поэтому если самолет сверхзвуковой, то отсоединенный скачок на
стреловидном крыле появится при большей скорости, а косой скачок будет
менее интенсивным. На таком же крыле дозвукового самолета скачок
уплотнения в миделевом сечении может появится при большей скорости
полета
12.8.5. Трубка Пито в сверхзвуковом потоке
Теория трубки Пито в сверхзвуковом потоке, обязательно должна
учитывать образование перед ней отсоединенной ударной волны, т.к. по
необходимости передний носик трубки Пито является тупым. Как следует из
вышесказанного, перед носиком трубки обязательно образуется
отсоединенная ударная волна. Участок волны перед приемным отверстием
235
.
можно считать прямым и для определения давления Р0 можно
воспользоваться соотношениями для прямой ударной волны. Газ между
ударной волной и носиком трубки
подвергается
адиабатическому
M1 υ1 P1
υ2 M2 P2
торможению. Согласно формуле
(12.6.5) в обозначениях рис. 12.17,
имеем:
γ
P0
γ − 1 2 γ −1
= (1 +
M 2 ) . (12.8.17)
P0 υ0=0
P2
2
Но из формул (12.6.18) и (12.6.17)
следует:
Рис. 12.17
M 22
2 + ( γ − 1 )M 12
=
,
2γ M 12 + γ − 1
P2
2γ
γ −1
.
=
M 12 −
γ +1
P1 γ + 1
(12.8.18)
Формулы (12.8.17) и (12.8.18) позволяют выразить Р0 через Р1 и М1.
Зная давление Р1 и температуру Т1 можно вычислить М1. В свою очередь,
если известна температура набегающего потока Т1 (а, следовательно и С1), то
по данным формулам можно вычислить и скорость набегающего потока υ1
или скорость полета самолета. Для увеличения точности измерения и
определения различных поправок трубки Пито градуируются в
аэродинамических трубах.
236
12.9. ВОЛНА РАЗРЕЖЕНИЯ
12.9.1. Изменение термодинамических параметров и скоростей в
волне разрежения
Рассмотрим обтекание сверхзвуковым потоком плоского тупого угла β
(рис. 12.18). Линию АОВ можно рассматривать как одну из двух стенок
плоского расширяющегося насадка. Пусть газ движется вдоль АО с
постоянной сверхзвуковой скоростью υ1 > c1 и вытекает в пространство, в
котором давление Р2 меньше, чем
давление Р1 в набегающем потоке.
Газ будем полагать идеальным
(η=0, λ=0), а движение установившимся. В данной задаче,
очевидно, удобно воспользоваться
полярной системой координат.
Если
плоское
сопло
очень
широкое, то движение газа можно
рассматривать
как
плоское,
Рис. 12.18
в котором все термодинамические величины и скорости зависят только от
угла φ полярной системы координат с началом в точке 0 и не зависят от r (для
упрощения задачи). Пусть линия φ=0 определяет начало отсчета углов φ.
Непрерывность термодинамических величин и скоростей в волне
разрежения позволяет не брать какие-то интегральные соотношения типа
законов сохранения, а обратиться непосредственно к уравнениям движения.
Принимая во внимание вышесказанное, из п.8.3 (цилиндрическое
течение Пуазеля) из системы уравнений сохранения (8.3.17) для идеальной
среды (ν=0) в цилиндрической системе координат получим следующую
систему уравнений эволюции:
υϕ ∂υ r υ 2ϕ
1 ∂p
−
=0=−
,
1.
r ∂ϕ
r
ρ ∂r
2.
υϕ ∂υϕ υ rυϕ
1 ∂p
+
=−
,
r ∂ϕ
r
rρ ∂ϕ
∂υ r
= υϕ ,
∂ϕ
υϕ (υ r +
∂υϕ
∂ϕ
(12.9.1)
)=−
1 ∂p
,
ρ ∂ϕ
3. 0 ≡ 0, .
4.
1 ∂ρυϕ ρυ r
+
= 0,
r ∂ϕ
r
υϕ
∂υϕ
∂ρ
+ρ
+ ρυ r = 0 ,
∂ϕ
∂ϕ
∂υ
ρ⎛
∂ρ
= − ⎜⎜υ r + ϕ
υϕ ⎝
∂ϕ
∂ϕ
⎞
⎟⎟ .
⎠
237
Проведем следующие преобразования, используя 2 и 4 уравнения (12.9.1) :
∂P ⎛ ∂P ⎞ ∂ρ
∂ρ
,
= ⎜⎜ ⎟⎟
= с2
∂ϕ ⎝ ∂ρ ⎠ ∂ϕ
∂ϕ
∂υ
⎛
υϕ ⎜⎜υ r + ϕ
∂ϕ
⎝
⎞ с2
⎟⎟ =
⎠ υϕ
∂υ
⎛
⎜⎜υ r + ϕ
∂ϕ
⎝
⎞
⎟⎟ .
⎠
Таким образом, имеем следующее уравнение:
∂υ
⎛
⎜⎜υ r + ϕ
∂ϕ
⎝
⎞⎛
с 2 ⎞⎟
⎜
⎟⎟ υϕ −
= 0.
⎜
υϕ ⎟⎠
⎠⎝
(12.9 2)
Уравнение (12.9.2) удовлетворяется в двух случаях.
∂υ ⎞
⎛
⎜⎜υ r + ϕ ⎟⎟ = 0 .
Первый случай.
∂ϕ ⎠
⎝
Принимая во внимание
последовательных выводов:
∂υ
⎛
⎜⎜υ r + ϕ
∂ϕ
⎝
⎞
⎟⎟ = 0 ,
⎠
∂P
= 0,
∂ϕ
dh 1 ∂P
=
,
dϕ ρ ∂ϕ
2
уравнение
dh = TdS +
P = const ,
h = const ,
(12.9.1),
h = C PT ,
1
ρ
получим
ряд
S = const ,
dP ,
T = const .
Из уравнения Бернулли следует, что в этом случае и υ=const. Далее
можно показать, что при этом и направление потока не изменяется.
Действительно. Рассмотрим направление скорости в какой-либо точке
потока (рис. 12.19). Пусть угол φ полярной системы координат и угол χ,
определяющий направление скорости в любой точке потока по отношению к
выбранному постоянному направлению (линия АО) отсчитываются, как
показано на рис. 12.19.
Из рисунка следует:
ϕ = χ + arcctg
υr
.
υϕ
После дифференцирования по φ имеем:
+1 =
Рис. 12.19
∂χ
+
∂ϕ
1
υ 2r
1+ 2
υϕ
⎛ 1 ∂υ r υ r ∂υϕ ⎞
⎟
⎜
⎜ υ ∂ϕ − υ 2ϕ ∂ϕ ⎟ .
⎠
⎝ ϕ
Т.к. из 1-го уравнения (12.9.1)
и (12.9.2) υ r = −
∂υϕ
∂ϕ
∂υ r
= υϕ
∂ϕ
, то получаем:
238
∂χ
= 0,
∂ϕ
χ = const .
Следовательно, в этом случае не изменяются ни термодинамические
параметры и модудь скорости, но и направление потока.
Таким образом, первое решение описывает тривиальный случай
плоско-параллельного поступательного движения сверхзвукового потока.
Второй случай.
υϕ −
с2
υϕ = c .
= 0,
υϕ
Из 4-го уравнения (сохранения м ассы или непрерывности ) (12.9.1), имеем:
∂ρυ ϕ
∂ϕ
+ ρυ r = 0 ,
ϕ = −∫
d ( ρυϕ )
ρυ r
= −∫
d ( ρс )
ρυ r
.
(12.9.3)
Но скорость υr может быть определена из следующих соображений:
2
2
2
2
υ2
γ + 1 с*
с2
.
+
=
2 γ −1 γ −1 2
υr = υ − с ,
υ = υϕ + υ r = с + υ r ,
2
2
2
2
2
Компонента скорости υr может быть определена через c и c*.:
γ + 1 2 2с 2
γ +1 2 2
υr =
с* −
− с2 =
(с − с ) ,
γ −1
γ −1
γ −1 ∗
υr =
2
γ +1 2 2
(с − с ) .
γ −1 ∗
Далее можно сделать следующие преобразования:
с =γ
2
P
ρ
,
P
ρ
γ
γ −1
с = constγρ
2
= const ,
2
ρ = constс ,
γ −1
P1
ρ1
γ
=
γ −1
P*
ρ*
γ
с = constρ 2 ,
,
=
P2
ρ2
γ
.
(12.9.4)
Подставляя полученные соотношения в (12.9.3) , получим:
2
ϕ = −∫
γ + 1 γ −1
с dс
γ −1
γ +1
с
γ −1
2
γ −1
с 2* − с 2
=
γ +1
с
arccos + const .
γ −1
с*
(12.9.5)
Очевидно, что постоянная интегрирования связана с началом отсчета
углов, и пока положим ее равной нулю, а начало отсчета найдем из
физических соображений.
239
Если в уравнении 2 системы (12.9.1) использовать замену:
∂ρ
∂P ⎛ ∂P ⎞ ∂ρ
и уравнение адиабаты, то можно показать, что:
= с2
=⎜ ⎟
∂ϕ
∂ϕ ⎝ ∂ρ ⎠ s ∂ϕ
⎛ γ −1 ⎞
ϕ ⎟⎟ ,
+
1
γ
⎝
⎠
υ ϕ = с = с* cos⎜⎜
⎡
υ r = c*
γ +1 ⎛ γ −1 ⎞
ϕ⎟,
sin⎜
γ − 1 ⎜⎝ γ + 1 ⎟⎠
(12.9.6)
⎛ γ − 1 ⎞ γ + 1 2 ⎛ γ − 1 ⎞⎤
ϕ ⎟⎟ +
ϕ ⎟⎟⎥ .
sin ⎜⎜
1
γ
γ
γ
−
+
1
1
+
⎠⎥⎦
⎝
⎠
⎝
υ 2 = υ 2 r + υ 2 ϕ = c 2 * ⎢cos 2 ⎜⎜
⎣⎢
Если использовать 2-е уравнение системы (12.9.1), (12.9.6), уравнение
адиабаты и уравнение идеального газа, то термодинамические параметры в
волне разрежения равны:
2
⎛
γ − 1 ⎞ γ −1
⎜
ρ = ρ * ⎜ cos
ϕ ⎟⎟ ,
γ
+
1
⎝
⎠
2γ
⎛
γ − 1 ⎞ γ −1
⎜
P = P* ⎜ cos
ϕ ⎟⎟ ,
γ
+
1
⎝
⎠
⎛ γ −1 ⎞
T = T* cos 2 ⎜⎜
ϕ ⎟⎟ .
+
1
γ
⎝
⎠
(12.9.7)
Движение газа, описываемое соотношениями (12.9.6,7), называют
волной разрежения.
Из полученных соотношений (12.9.6), (12.9.7) видно, что с
увеличением угла φ, все термодинамические величины и скорости
изменяются непрерывно. Причем с увеличением угла φ плотность, давление и
температура газа, а, следовательно, и скорость звука, убывают. Модуль же
скорости движения газа, как это следует из уравнения Бернулли,
возрастает. Таким образом, изменение всех термодинамических величин и
скоростей в волне разрежения обратно пропорционально их изменению в
ударной волне. p↓ ,ρ↓ ,T↓ ,c↓ , υ↑..
Следует еще раз подчеркнуть, что если в ударной волне они
изменяются скачком, то в волне разрежения все
термодинамические
величины и скорости изменяются непрерывно. Следовательно, волна
разрежения занимает определенную область пространства в движущемся
газе.
12.9.2. Максимальный угол поворота потока в волне разрежения
Из физических соображений следует, что поток, движущийся вдоль
стороны АО тупого угла должен повернуть вдоль стороны угла ОВ
(рис. 12.18). Если теперь угол φ отчитывать по направлению потока, то,
очевидно, что компонента полной скорости υφ должна быть всегда
240
положительна υφ > 0. Положительной должна быть и компонента скорости υr
(υr >0) в области возмущенного движения, так как возмущение, вызываемое
вершиной угла, распространяется вдоль прямых характеристик, исходящих из
вершины угла в положительном направлении.
Тогда из формулы (12.9.6) следует, что υφ и υr могут быть
одновременно положительны только в первом квадранте изменения их
аргумента. Поэтому φ может изменяться только в следующих пределах:
0=
γ −1
ϕ min , ϕ min = 0 ,
γ +1
π
2
=
γ −1
ϕ max ,
γ +1
ϕ max =
π γ +1
. (12.9.8)
2 γ −1
Поэтому волна разрежения занимает сектор с вершиной в точке О,
ограниченный прямыми, исходящими из точки О с углом раствора, равным:
Δϕ max = ϕ max − ϕ min =
π γ +1
.
2 γ −1
Для воздуха γ=1.4, тогда Δϕ max =219о.
Начертим линию тока в волне разрежения, и введем угол χ,
характеризующий поворот потока. Рассмотрим, как изменяется угол χ
(рис. 12.20) при изменении угла φ.
Рис. 12.20
Отчет обоих углов будем вести по потоку от некоторого начального
направления φ = 0. Из рис. 12.20 следует:
χ = ϕ + arctg
υϕ
⎡ γ −1
γ −1 ⎤
= ϕ + arctg ⎢
ctg
ϕ⎥ .
+
+
1
1
υr
γ
γ
⎣
⎦
(12.9.9)
Угол χ изменяется от его значения χmin при φmin=0 до его значения χmax при
φmax, определяемого формулой (12.9.8), подстановка которой в (12.9.9) дает
следующие пределы для угла поворота потока χ:
241
χ min =
π
2
,
χ max = ϕ max =
π ⎛ γ +1 ⎞
π γ +1
− 1⎟ . (12.9.10)
, Δχ max = χ max − χ min = ⎜⎜
2 ⎝ γ − 1 ⎟⎠
2 γ −1
Таким образом, из (12.9.10) следует, что поток в волне разрежения
нельзя повернуть на угол, больший, чем угол Δχmax. Для воздуха Δχmax=130о.
Из формул (12.9.6-8) следует, что при φ= φmax параметры поля и
скорости равны
ρ = 0, P = 0, T = 0, υϕ = 0,
υ r = c*
2
2
γ +1
γ +1
= c0
= c0
= υ max .
γ −1
γ +1 γ −1
γ −1
(12.9.11)
Следовательно, линия φ=φmax есть линия, граничащая с вакуумом, когда
температура вытекающего газа становится равной нулю. Только в этом случае
возможен поворот потока воздуха на ~130о.
(характеристика и
Угол 130о получается при υ1=с1=с*, тогда φ1=0
начало поворота потока совпадают). При υ1>с2 угол поворота будет меньше,
вплоть до 0, а так как направление φ=0 искусственное (там поток еще не
поворачивает), то и значение χ0=π/2 получается неестественное и на самом
деле поток поворачивает на совсем другой угол (при очень больших
скоростях).
Прямому лучу φ=0 соответствует υ1=с1=с*; при М1>1 такой линии
фактически нет, так как везде υ/с>1. Представляя себе, однако, волну
разрежения формально продленной в область правее ОС (рис. 12.20) и
воспользовавшись формулой (12.9.5), найдем, что разрыву ОА надо придать
значение угла φ, равное:
ϕ1 =
c
γ +1
arccos 1 .
c*
γ −1
12.9.3. Сектор, занимаемый волной разрежения
Для построения сектора, занимаемого волной разрежения, необходимо
найти начало отсчета углов φ и χ. Для нахождения начала отсчета углов,
можно воспользоваться физическими соображениями. Действительно,
вершина обтекаемого угла является источником возмущений. Возмущения же
распространяются в движущемся газе под углом Маха α (sinα=1/M1).
Возмущения, вызывающие образование слабых разрывов, исходящих
от особой линии (ось OZ) распространяются по направлению от нее. Это
значит, что ограничивающие волну разрежения слабые разрывы должны быть
“исходящими” по отношению к точке О, т.е. касательная к слабому разрыву
компонента скорости υr должна быть положительна.
242
Поэтому, начало возмущенного потока или начало волны разрежения
определяется линией, проведенной из вершины угла под углом α к
направлению набегающего потока или к направлению стороны угла АО. Эта
линия, очевидно, является первой характеристикой, ограничивающей волну
разрежения слева, т.е. со стороны невозмущенного потока.
Очевидно, этой начальной характеристике необходимо приписать угол
φ=φ1, который следует из соотношений (12.9.6) при υφ=υ1. Таким образом,
первой характеристике необходимо приписать угол:
ϕ1 =
υ
γ +1
arccos 1 .
γ −1
c*
(12.9.12)
Откладывая угол φ1 от линии, проведенной под известным (при данном М1)
углом α влево, получим начало отсчета угла φ. В свою очередь, угол χ1,
очевидно, может быть определен по формуле (12.9.9) при подстановке в нее
угла φ1.
Вторую характеристику, ограничивающую волну разрежения справа,
можно найти, используя следующие соображения. Пусть поток после
прохождения угла АОВ поворачивает и движется вдоль стороны угла ОВ.
Тогда известен угол поворота потока Δχ. Причем, из рис.12.21 следует, что
Рис. 12.21
Δχ = χ − χ = 180 o − β , χ = 180 o − β + χ = 180 o − β + ϕ + α .(12.9.13)
2
1
2
1
1
Поскольку известны углы χ1 и β, то известен и угол χ2. Тогда,
подставляя χ= χ2 в формулу (12.9.9), можно определить и угол φ2,
отсчитываемый от вычисленного выше начала отсчета углов и определяющий
вторую характеристику, ограничивающую волну разрежения справа.
Таким образом, можно найти сектор, занимаемый волной
разрежения.
243
12.9.4. Тангенциальный разрыв скорости в волне разрежения
Характер движения газа при обтекании тупого угла сверхзвуковым
потоком в существенной мере зависит от противодавления Р2, т.е. давления,
которое встречает поток газа, движущийся вдоль стороны угла АО. При
заданном М1 и угле β, как показано выше, можно рассчитать противодавление
Р2теор, при котором поток в волне разрежения в точности повернет вдоль
стороны угла ОВ. Для этого
необходимо
определить
начало отсчета углов φ1
(согласно (12.9.12)), по
P2 ρ2 M2>1 формуле (12.9.9) определить
P1, ρ1, M1>1, T1
χ1, по формуле (12.9.13)
вычислить χ2, по формуле
A
β
(12.9.9) определить φ2 и,
Рис.12.22
C
наконец,
по
формуле
(12.9.7)
и
уравнению
B
адиабаты, зная Р1 и ρ1,
найти Р2теор.
Если Р2>Р2теор, то поток при заданных Р1, М1 и β не будет двигаться
вдоль стороны угла ОВ. Между стороной ОВ и крайней линией тока
образуется застойная зона покоящегося газа, т.е. наблюдается
тангенциальный разрыв скорости (рис. 12.22).
В застойной зоне вследствие вязкости реальных газов будут
образовываться крупные нерегулярные вихри. Если уменьшать давление Р2,
то при достижении Р2=Р2теор поток будет полностью прилегать к стороне угла
ОВ без образования застойной зоны. Если дальше уменьшать давление
Р2<Р2теор, то поток будет продолжать двигаться вдоль стороны угла ОВ. Если
при Р2=Р2теор уменьшить угол β, то газ снова не будет следовать вдоль ОВ и
снова в газе должен образоваться тангенциальный разрыв скорости ОС на
линии тока, граничащей с неподвижным газом, который будет в
действительности (в силу вязкости реальных жидкостей) размываться в зону
вихревого турбулентного движения. Если при уменьшении угла β уменьшить
и противодавление, то можно добиться давления Р2, при котором газ снова
будет двигаться вдоль ОВ без образования застойной зоны и т.д.
Очевидно, при Р2=0 угол β будет минимален, а угол поворота
максимален (для воздуха Δχmax=130о). При этом граничная линия тока, как
указывалось выше, должна граничить с вакуумом, температура газа должна
быть равна нулю, а компоненты скорости равны: υφ=0 и υr=υmax (рис. 12.23).
244
0
A
Β=50
o
Δχmax=130o
υ2= υ2max
B
Рис.12.23
Если теперь угол β еще уменьшить, то газ не будет следовать вдоль
стороны угла ОВ и между стороной ОВ и граничной линией тока будет зона
вакуума.
Рассмотрим движение, при котором противодавление Р2 больше, чем
давление в набегающем потоке (Р2>Р1). Очевидно, что в этом случае должна
образовываться косая ударная
P1 ρ1 M1
P2>P1 волна, исходящая из вершины
обтекаемого угла АОВ. Зная Р1,
C
М1 и Р2, можно определить
χ
φ
угол φ – угол наклона косой
0
A
ударной волны к направлению
β
набегающего
потока
Рис.12.24
B
(рис. 12.24).
Зная угол φ и М1 по
ударной поляре можно найти υ2 и χ. При этом должен образовываться
тангенциальный разрыв скорости ОС, разграничивающий область
движущегося газа и застойную зону хаотического турбулентного движения
(для реальных газов). При дальнейшем увеличении Р2>Р1 может оказаться,
что sinφ, окажется больше 1. Это означает, что в движущемся газе должна
образовываться отсоединенная ударная волна (рис. 12.25).
Рис.12.25
245
12.10. ВЗАИМОДЕЙСТВИЕ УДАРНЫХ ВОЛН И ВОЛН РАЗРЕЖЕНИЯ
Ударные волны и волны разрежения в движущемся газе могут
накладываться друг на друга, пересекаться или, падая на твердую стенку,
ограничивающую движение, отражаться от нее или, встречая
тангенциальный разрыв, также испытывать отражение или преломление.
Рассмотрим качественно отражение или пересечение ударных волн и
волн разрежения с тангенциальным разрывом.
y
χ
O
φ1
υ1
С
υ2
φ2 υ
3
χ
В
φпад
χ
φотр
А
Рис. 12.26
12.10.1. Отражение ударной волны от стенки
Пусть на твердую стенку падает косая ударная волна (рис. 12.26).
Можно представить, что вдали от стенки в сверхзвуковой поток помещен
клин, от которого отошла рассматриваемая ударная волна. Для определения
движения газа за падающей ударной волной можно воспользоваться ударной
полярой (рис. 12.27).
Выберем на номограмме поляру, соответствующую заданному числу
Маха М1. Проведем из начала координат прямую под известным углом φ1,
найденным по углу полураствора клина χ. Из точки В1 опустим на эту
прямую перпендикуляр. Тогда, как известно, пересечение этого
перпендикуляра с ударной полярой определит отрезок ОС1, определяющий
скорость υ2 за падающей ударной волной, а также угол поворота потока χ.
Зная М1 и φ1 по формуле (12.8.4) определим М2 – число Маха за падающей
ударной
волной.
Очевидно
М2<М1.
Поэтому
ударная
поляра,
соответствующая М2, будет лежать внутри ударной поляры соответствующей
М1. На рис.12.26 можно провести линию тока за падающей ударной волной.
246
υ2 y
D1
D2
ϕ1
υ1
C1
υ2
ϕ2
О
·
А1
B1
C2
χ
А2
υ2 x
B2
M2
M1
Рис. 12.27
Но газ за падающей ударной волной должен двигаться вдоль твердой
стенки. Это значит, что от точки пересечения с падающей ударной волной со
стенкой (точка О), должна отойти также косая ударная волна, в которой газ
должен повернуть на тот же самый угол χ и двигаться вдоль стенки.
Скорость за отраженной ударной волной может быть найдена, если
определена точка С2 – точка пересечения линии ОС1 с ударной полярой М2.
Если теперь из точки В2 провести через точку С2 линию, а на нее из начала
координат опустить перпендикуляр, то линия ОD2 определит угол φ2 – угол
отражения падающей ударной волны. Снова, зная М2 и φ2, можно определить
число Маха за отраженной волной. Очевидно, М3<М2. Поскольку М2<М1, то
φ2>φ1. Пользуясь формулой (12.8.4), это можно легко показать аналитически.
Таким образом, падающая на твердую стенку ударная волна
отражается от нее тоже в виде косой ударной волны, причем угол
отражения не равен углу падения (см. рис. 12.26). Только очень слабые
(звуковые) ударные волны М2 ≈ М1 будут отражаться от твердой поверхности
“зеркально” (φ2 ≈ φ1).
Если падающая ударная волна настолько интенсивная, что φ2
становится больше φmax, то в этом случае отражение будет неправильным
(рис. 12.28).
υ1> υ2>с2
υ1> υ2<с2
0
Рис.12.28
247
Между стенкой и точкой отражения возникает участок прямой
ударной волны ОО1. Вообще, скорость газа, прошедшего через отраженную
волну, может быть и не равна скорости газа, прошедшего прямую ударную
волну. Это значит, что от точки О1 может отойти тангенциальный разрыв, то
есть линия, на которой все термодинамические параметры непрерывны,
нормальная компонента скорости равна нулю, а тангенциальная к
поверхности разрыва скорость газа испытывает скачок.
Ударная волна мощного надземного взрыва отражается неправильно, и
вдоль поверхности земли двигается прямая ударная волна.
12.10.2. Пересечение двух ударных волн
Рассмотрим взаимодействие в газе двух ударных волн. Снова можно
представить, что они образовались от двух клиньев, обтекаемых
сверхзвуковым потоком газа (рис. 12.29).
Если
ударные
волны
одинаковой
A
интенсивности, то линия тока, проходящая
1
через точку пересечения (точка О), не должна
претерпевать каких-либо изменений и ее можно
рассматривать
как
твердую
стенку.
Воспользуемся предыдущим рассмотрением
отражения падающей ударной волны от твердой
2 Рис. 12.29 B
стенки.
Если ударные волны имеют достаточно
большую интенсивность, то пересечение становится неправильным.
Образуется участок прямой ударной волны; а от точек О и О’ отойдут
тангенциальные разрывы (рис.12.30)..
Рис.12.30
Рис. 12.31
Если интенсивность пересекающихся ударных волн неодинакова, то
направление поворота потока определяется так: поток, прошедший ударную
248
волну большей интенсивности, повернет в сторону менее интенсивной
ударной волны (рис. 12.31).
М=0.80
М=0.90
М=0.95
М=0.98
Рис. 12.31а
Развитие следа при возрастающем числе М с . взаимодействием
ударных волн можно наблюдать на рис. 12.31а. По мере того как число Маха
невозмущенного потока внеозрастает, приближаясь к единице, след за
круговым цилиндром переходит от периодического схождения вихрей,
характерного для малых скоростей, к квазистационарному следу с шейкой,
устанавливающемуся при сверхзвуковых скоростях. Взаимодействие косых
ударных волн с турбулентным следом за цилиндром приводит к образованию
«неправильной» косой ударной волны с участком прямой за кормой
цилиндра. [Dyment, Gryson, Ducruet, 1980]
249
12.10.3. Взаимодействие ударной волны и волны разрежения с
тангенциальным разрывом
Предположим, что в движущемся газе есть тангенциальный разрыв.
Под тангенциальным разрывом понимают такую поверхность, на которой
все термодинамические величины непрерывны, а тангенциальные
компоненты скорости терпят разрыв. Непрерывность термодинамических
величин следует из уравнений сохранения на поверхности разрыва (см.12.5).
Если с одной стороны поверхности разрыва термодинамические
параметры и скорости есть P1 , ρ1 , T1 , υ n1 , υτ 1 , а с другой - P2 , ρ 2 , T2 , υ n 2 , υτ 2 . То
на поверхности тангенциального разрыва выполняются равенства P1=P2, ρ1=
ρ2, T1=T2, υп1= υп2 , но υ1τ ≠ υ2τ.
Пусть на такой тангенциальный разрыв падает ударная волна (рис.
12.32) . В газе, прошедшем через ударную волну, давление возрастает. Но в
поле течения за областью взаимодействия ударной волны с тангенциальным
разрывом давление должно уменьшиться до начального P1. Следовательно,
должен существовать механизм, который понижал бы давление с Р2 до Р3=Р1.
Это может быть только волна разрежения (давление в области, ограниченной
характеристиками 1 и 2, понижается). В соответствии с изменением
направления скорости в ударной волне и волне разрежения, поворачивает
тангенциальный разрыв.
υ1
υ1
P1
P3=P1<P2
P1
P1
P3< P1< P2
P2> P1
Рис. 12.32
Таким образом, косая ударная волна, падающая на тангенциальный
разрыв, отражается в виде волны разрежения; и наоборот, волна разрежения,
падая на тангенциальный разрыв, отражается в виде косой ударной волны.
250
12.10.4. Возникновение ударной волны в пограничном слое
Вспомним явление отрыва пограничного слоя при М<1. В
соответствии с уравнением Бернулли при обтекании профиля крыла самолета
дозвуковым потоком до миделева сечения давление уменьшается, .скорость
растет, а после него, наоборот, давление возрастает, скорость уменьшается. В
миделевом сечении υ= υmax, p= pmin. Если скорость движения увеличится, то
даже при дозвуковой скорости в миделевом сечении она может оказаться
равной местной скорости звука. Возможным становится образование ударной
волны – скачка уплотнения. Газу за миделевым сечением приходится
преодолевать не только противодавление, но и скачок уплотнения, который
дополнительно стимулирует отрыв пограничного слоя. Ясно, что отрыв будет
происходить в миделевом сечении. Этот скачок. а также увеличение давления
за миделевым сечением и являются причинами отрыва пограничного слоя и
его турбулизации.. Величина же турбулентной зоны за миделевым сечением
до 80% определяет сопротивление тела.
Возникновение ударных волн в пограничном слое при дозвуковом
обтекании выпуклого тела показано на рис. 12.33-35.
Множественные
ударные
волны на профиле с ламинарным
пограничным слоем показаны на
рис.12.33.
Область местного
сверхзвукового течения обычно
заканчивается ударными волнами,
на форму которых оказывает
влияние пограничный слой. Если
этот слой ламинарен, то сначала
Рис. 12.33
Появляется последовательность так
называемых ламбдообразных ударных волн. На этой шлирен-фотографии,
выполненной при вертикальной кромке ножа, видна картина обтекания
двояковыпуклого профиля 12%-ной толщины при числе Маха
невозмущенного потока, равном 0,8 (Н. W. Liepmann)
Ламбдообразные ударные волны над ламинарным пограничным слоем
при возрастающих числах Маха представлены на рис. 12.34. Видно, что при
возрастании местного числа Маха, значения которого приводятся под каждой
парой шлирен-фотографий, ламбдообразные ударные волны сливаются
между собой. Здесь ламинарный пограничный слой формируется на
искривленной пластинке, которая создает растущую ограниченную область
сверхзвукового течения, погруженную в дозвуковой поток. Тем самым
251
имитируется сверхкритическое обтекание профиля. Символы на снимках
слева указывают, что кромка ножа вертикальна для верхнего ряда, а для
нижнего горизонтальна [Ackeret, Feldmann, Rott, 1946].
Рис. 12.34
Рис. 12.35 иллюстрирует
одиночную
ламбдообразную
ударную волну на профиле с
ламинарным пограничным слоем.
При увеличении числа Маха
множественные ударные волны,
показанные
на
предыдущем
снимках, сливаются в одну волну.
Здесь
видно
(кромка
ножа
горизонтальна), что при М = 0,9
Рис. 12.35
ламинарный пограничный слой
оторвался от поверхности двояковыпуклого профиля перед ударной волной и
стал турбулентным (Н. W. Liepmann).
.
Рис. 12.36
На рис. 12.36 показан шар в свободном
полете в воздухе при числе Рейнольдса
920 000, который схвачен вспышкой при
теневом
фотографировании
почти
за
пределами поля зрения. Видно, что λ-скачок
уплотнения
вызывает
турбулентный
отрыв пограничного слоя перед экватором.
При
малых числах Маха отрыв слоя
происходит за экватором вниз по потоку в
зависимости от числа М (A. Stilp, 1965).
252
12.11. ИСТЕЧЕНИЕ ГАЗА ИЗ СУЖАЮЩЕГОСЯ НАСАДКА
Рассмотрим качественно истечение газа из сужающегося насадка в
неподвижный газ. Выше уже отмечалось, что при достижении на выходе
сопла некоторого давления, равного его критическому значению, скорость
газа на срезе сопла достигает критической скорости звука c*. Однако, вне
сопла давление может оказаться и больше и меньше этого критического
значения. Рассмотрим случай, когда давление вне сопла больше критического
давления, то есть Р0>Р*. Нарисуем качественно картину движения газа вне
сопла.
Будем полагать для простоты, что
P1>P0>P*
сопло плоское. Край сопла можно
рассматривать как источник возмущения
P1>P*
(рис. 12.36). Газ вне сопла неподвижен, а
выходящий из сопла газ имеет скорость,
P=P* P0
равную критической скорости звука на
Рис. 12.36
срезе сопла. Тогда от края сопла должен
отойти тангенциальный разрыв скорости. Для того чтобы давление в
выходящем газе повысилось от давления Р* до давления Р0>Р*, необходимо,
чтобы от края сопла отошла ударная волна. Ударные волны, отошедшие от
обеих кромок сопла, пересекутся по известному закону, а затем упадут на
тангенциальный разрыв, от которого они отразятся в виде волн разрежения. В
свою очередь, волны разрежения после пересечения отразятся от
тангенциального разрыва в виде ударных волн и так далее. Газ, прошедший
ударные волны, тормозится, и давление возрастает. Газ, прошедший волны
разрежения, ускоряется, и давление в нем падает. Это чередование ударных
волн и волн разрежения будет происходить до тех пор, пока в силу вязкости и
теплопроводности кинетическая энергия движения не диссипируется
настолько, что скорость движения газа станет дозвуковой.
Если давление газа вне сопла Р0 меньше чем Р*, то есть Р0<Р*, то от
кромок сопла, прежде всего, отойдут волны разрежения (рис. 12.37), которые
отражаются от тангенциального разрыва в
виде косых ударных волн.
P0<P*
Далее вниз по течению картина
повторяется до тех пор, пока скорость
P1>P*
газа не станет дозвуковой. При Р0=Р* вне
сопла движение газа будет происходить
P
0
Рис. 12.37 без образования ударных волн или волн
P=P
разрежения.
253
Если давление вне сопла значительно превосходит критическое
давление, то, очевидно, при пересечении первых ударных волн, отошедших
от кромки сопла, возможно неправильное пересечение с образованием
участка прямой ударной волны.
12.12. СОПЛО ЛАВАЛЯ В НЕРАСЧЕТНОМ РЕЖИМЕ
Режим движения газа в сопле Лаваля в существенной мере зависит от
противодавления. Рассмотрим качественно, как будет происходить движение
внутри сопла Лаваля по мере уменьшения противодавления.
На рис. 12.38 представлен график изменения давления вдоль сопла в
зависимости от противодавления.
P0
P0
P*
χ
P
Pвых
Р’вых
Р”вых
O
χ
Рис. 12.38
Если Рвых=Р0, то очевидно движение газа внутри сопла отсутствует и
давление будет одинаковым в любом сечении сопла (кривая 1). По мере
уменьшения выходного давления, газ начнет двигаться вдоль сопла, и
распределение давления вдоль сопла представится некоторой кривой 2.
Очевидно, минимальное давление всегда будет в самом узком сечении сопла.
При дальнейшем уменьшении Рвых в минимальном сечении скорость газа
может достигнуть скорости звука в этом критическом сечении, а давление
будет равно Р*. При этом возникнет альтернатива. Или дальше за
критическим сечением газ будет двигаться дозвуковым образом, а давление
вниз по потоку будет возрастать от Р* до Р’вых (кривая 3), или газ будет
двигаться далее сверхзвуковым образом, а давление будет продолжать падать
до Р”вых (кривая 4). Очевидно, что эта альтернатива разрешается величиной
противодавления. Давление Р”вых можно рассчитать следующим образом. В
12.3. была получена формула, связывающая величину поперечного сечения
сверхзвуковой части сопла Лаваля с числом Маха (12.21):
254
γ +1
S вых
S min
⎛ γ − 1 2 ⎞ 2 (γ −1)
1+
M вых ⎟
1 ⎜
2
⎟
= ⎜
,
γ +1
M⎜
⎟
⎜
⎟
⎝
⎠
2
S вых
= f (M ) .
S min
Поэтому, зная Sвых и Smin, мы могли бы рассчитать число Маха в
сечении Sвых и, в частности, число Маха в выходном сечении Мвых. Далее,
используя уравнение Бернулли и уравнение для адиабатического движения
P
ργ
= const , можно легко получить формулу, аналогичную (12.9), как это
сделано в 12.7. и можно вычислить расчетное значение Р”вых по формуле:
P
//
вых
= P0 (1 +
γ −1
2
M
2
вых
)
γ
γ −1
.
(12.2)
Таким образом, если выходное давление будет равно Р”вых,
рассчитанному по формуле (12.88), то газ будет двигаться за критическим
сечением (Sмин) сверхзвуковым образом. Если давление на выходе из сопла
будет меньше расчетного Р”вых, то дальнейшее ускорение потока и падение
давления будет происходить вне сопла.
Если же давление на выходе сопла будет больше расчетного Р”вых, то
движение газа внутри сопла за критическим сечением не может быть везде
сверхзвуковым. В этом случае образуется прямая ударная волна, переводящая
в этом сечении давление до ударной волны в давление Рвых> Р”вых. По мере
увеличения давления от Р”вых до Р’вых, ударная волна проникает все глубже и
глубже внутрь сопла (кривые 5,6,7).
12.13. ОБТЕКАНИЕ ПЛАСТИНКИ СВЕРХЗВУКОВЫМ ПОТОКОМ ПОД
МАЛЫМ УГЛОМ АТАКИ
Пусть пластинка, расположенная под углом α, обтекается
сверхзвуковым потоком. Газ, движущийся выше АО, воспримет пластинку
как тупой угол. Поэтому от точки О отходит волна разрежения, в которой газ
поворачивает вдоль пластинки, давление и температура уменьшается, а
скорость потока возрастает.
Газ же, движущийся ниже АО, воспринимает пластинку как клин.
Поэтому на пластинке возникает косой скачок уплотнения, за которым
давление и температура возрастают, а скорость потока уменьшается. После
пластинки оба потока объединяются и продолжают движение в
первоначальном направлении вдоль АО с одинаковыми давлениями и
255
скоростями. Поэтому в точке О’ образуется косая ударная волна в верхнем
полупространстве и волна разрежения -.в нижнем.
1
2 Fy
P1
P1>P2
O
A
M1>1
υ1>с1
F
Fx
α
P1
B
P2’>P1
P1<P2’
Рис.12.39
Рассчитав ударную волну и волну разрежения, можно найти Р2 и Р’2 , а также
найти полную силу F и составляющие - силу сопротивления Fx и подъемную
силу Fy..
13. МАГНИТНАЯ ГИДРОДИНАМИКА. ..................................................................... 257
13.1 Уравнения Максвелла. .........................................................................257
13.1.1 Ограничение класса рассматриваемых сред и движений..........258
13.2 Уравнения движения проводящей жидкости в .................................259
магнитном поле. ...........................................................................................259
13.2.1 Электрические массовые силы. ....................................................260
13.2.2 Магнитные массовые силы. ..........................................................260
13.2.3 Граничные условия. .......................................................................263
13.2.4 Тензор плотности потока импульса. ........................................264
13.2.5 Вектор Умова. ................................................................................265
13.3 Принцип вмороженности магнитных силовых линий. .................266
13.4 Диффузия магнитного поля. ...............................................................270
13.4.1 Задача Гартмана. ............................................................................271
13.5.1 Магнитогидродинамические машины. Электромагнитные
насосы. .....................................................................................................................276
13.5.2 Магнитогидродинамический генератор – МГД. ........................280
5.3 Плазменные двигатели. .........................................................................282
6. Спонтанное магнитное поле при турбулентном движении
проводящей жидкости. ...........................................................................................283
7. Одномерное движение проводящей сжимаемой жидкости в
поперечном магнитном поле. ................................................................................285
7.1 Уравнения движения в магнитной гидродинамике ........................285
7.2 Уравнение Бернулли в магнитной гидродинамике. ........................288
8. Ударные волны в магнитной гидродинамике ......................................289
257
13. МАГНИТНАЯ ГИДРОДИНАМИКА
ВВЕДЕНИЕ
За последние два десятилетия получил большое развитие раздел
механики сплошных сред, называемый магнитной гидродинамикой. Толчком к
развитию этого раздела послужила, с одной стороны, практическая потребность
создания электромагнитных насосов для атомной промышленности и
магнитогидродинамических генераторов для энергетики, плазменных
двигателей ракет, с другой стороны бурное развитие термоядерных
исследований и физической астрономии.
Если проводящая жидкость движется в магнитном поле, то в ней
индуцируются электрические токи, которые в свою очередь создают магнитные
поля. Взаимодействие последних с основным полем оказывает существенное
влияние на движение самой жидкости. Таким образом, полное описание
сложной картины взаимодействия и движения проводящей жидкости в
магнитном поле должно основываться на совместном рассмотрении
механических и электродинамических уравнений.
13.1. Уравнения Максвелла
Механические уравнения движения рассмотрены в предыдущих
разделах. Рассмотрим уравнения электродинамики применительно к магнитной
гидродинамике.
Уравнения электродинамики в неподвижной системе координат имеют
вид:
1 D 4
j,
1. rotH
C t
C
1 B
2. rotE
,
C t
3. divB 0 ,
(13.1.1)
4. divD 4 ,
5. j E ,
B H .
D E ,
Здесь E, H - векторы напряженности электрического и магнитного полей, D, B векторы электрической и магнитной индукции, , - диэлектрическая
постоянная и магнитная проницаемость среды, C - скорость света, - плотность
сторонних электрических зарядов, - проводимость среды, j - плотность тока.
Если среда движется, то напряженность электрического поля в
движущейся системе координат равна:
1
~
E E υ H .
C
Для изотропной среды, движущейся со скоростью υ , закон Ома следует
записать в виде:
258
1
j E υ H .
C
(13.1.2)
13.1.1. Ограничение класса рассматриваемых сред и движений
Магнитная гидродинамика как раздел механики рассматривает лишь
такие среды, для которых с большой точностью можно положить: 1, 1.
Несмотря на это ограничение набор сред магнитной гидродинамики, имеющих
практический интерес достаточно велик. Это проводящие жидкости,
расплавленные металлы, ионизированные газы, плазма.
В магнитной гидродинамике обычно рассматриваются лишь изотропные
среды. Если для , это ограничение достаточно определенно, то требование
изотропности проводимости необходимо рассмотреть более подробно на
микроскопическом уровне. В магнитном поле движущиеся заряды,
обуславливающие ток проводимости, движутся по сложным винтовым
траекториям. Так, частица, имеющая заряд e и массу m , влетая в однородное
магнитное поле напряженностью H перпендикулярное скорости частицы,
eH
будет вращаться вокруг силовой линии с угловой частотой Лармора
.В
mC
то же время заряженная частица, движущаяся вдоль силовой линии магнитного
поля не испытывает со стороны последнего никакого влияния. Поэтому
проводимость среды в магнитном поле может быть существенно анизотропной.
Проводимость вдоль магнитного поля будет значительно больше чем поперек.
Сравним период Ларморовской прецессии- t ЛАР и время между двумя
последовательными столкновениями молекул в газе- tСТ . Очевидно:
1
mC
t ЛАР
; t СТ
.
eH
t
Здесь t - средняя тепловая скорость частиц. Не трудно понять, что для того,
чтобы проводимость газа была изотропной, необходимо, чтобы выполнялось
следующее условие:
mC
t СТ t ЛАР ;
t .
(13.1.3)
eH
В этом случае частые столкновения частиц не позволят им описывать
замкнутые траектории в поперечном магнитном поле. Траектории на малой
длине свободного пробега будут почти прямолинейными и определятся
столкновением, а не магнитным полем. Следовательно, проводимость будет
изотропной, не зависящей от направления магнитного поля.
В магнитогидродинамических задачах обычно пренебрегают токами
смещения по сравнению с токами проводимости. Т.е. предполагается что:
D
t
1 .
(13.1.4)
J
Так, если среда находится в периодическом электрическом поле
E E 0 sin t , то отношение амплитуд равно:
259
D E , j E;
D
t
.
j
Поэтому для того чтобы пренебречь токами смещения по сравнению с
токами проводимости необходимо выполнение следующего неравенства:
1 .
(13.1.5)
Неравенство (13.1.5) означает, что при заданной проводимости магнитная
гидродинамика
не
рассматривает
слишком
быстропеременных
электромагнитных процессов, при которых ток смещения играл бы
существенную или определяющую роль (электромагнитные волны).
Например, проводимость меди равна 5 1017 , проводимость земной
ионосферы 1010 , проводимость солнечной короны 10 15 единиц CGSE. Из
формулы (13.1.5) следует, что ограничение по скорости изменения
электродинамических и механических величин в магнитной гидродинамике не
слишком сильное. Поскольку практически рассматриваются сравнительно
медленные движения сплошной среды, включая и ударные волны, то и
вызываемые ими скорости изменения электрических и магнитных величин
практически всегда удовлетворяют неравенству (13.1.5).
Физически же пренебрежение токами смещения означает, что между
изменениями E, H нет запаздывания. Значения H
в некоторый момент
времени определяется значениями E в тот же момент времени. Таким образом,
уравнения электродинамике в магнитной гидродинамике имеют вид:
4j
1. rotH
,
C
1 H
2. rotE
,
C t
3. divH 0 ,
4. divE 4 ,
(13.1.6)
1
5. j E υ H .
C
13.2 Уравнения движения проводящей жидкости в магнитном поле
Из уравнений системы (13.1.6) следует, что уравнения движения
проводящей жидкости и уравнения электродинамики могут быть связаны через
силу Лоренца, входящую в закон Ома.
Уравнение движения проводящей жидкости в общем виде можно
записать следующим образом:
i
i 1 ik
k
fi .
(13.2.7)
t
x k x k
260
В уравнении (13.2.7) f I -по-прежнему массовая сила не электромагнитного
происхождения. Для непроводящей жидкости, как и прежде, имеем:
2
ik ik ~ik ik i k ik l ik l .
xi 3
xl
xl
x k
В проводящей же жидкости, находящейся в электрическом и магнитном
полях, возникают силы электромагнитного происхождения тензорного
характера. Эти силы определяются, как известно тензорами электрических и
магнитных напряжений. При постоянных 1, 1 они имеют вид:
ik E 1 E i E k 1 E 2 ik ; ik H 1 H i H k 1 H 2 ik . (13.2.8)
4
2
4
2
Силы электрического и магнитного происхождения, действующие на
единицу массы проводящей жидкости, могут быть найдены по общему
правилу:
( ik ) H
1 ik E
f i H 1
( fi )E
;
.
(13.2.9)
x K
x K
Очевидно, следует добавить к правой части уравнения (13.2.7).
13.2.1. Электрические массовые силы
Найдем силу, действующую на единицу массы со стороны
электрического поля ( 1 ):
E
E
E
f i E 1 Ei E k 1 E 2 ik 1 Ei k E k i E k k
4 x k
2
x k
x i
4 x k
E i E k
1 E k
.
E
E
i
k
4 x k
x
x
i
k
Не трудно видеть, что последнее выражение можно записать в
следующем векторном виде:
1
EdivE (E rotE).
fE
4
Если на вещество действует только электрическое поле, то из системы
уравнений (13.1.6) следует (при H 0 ), что rotE 0 . Принимая во внимание
систему (13.1.6) имеем:
1
f E E .
(13.2.10)
13.2.2. Магнитные массовые силы
Рассмотрим силы, действующие на проводящее вещество в магнитном
поле. Если выделить в веществе единичный кубик с гранями,
перпендикулярными осям координат (рис.1), то силы, действующие на грани
этого кубика можно получить, рассмотрев компоненты тензора магнитных
напряжений:
261
ik H
1
1 2
H i H k H ik .
4
2
z
(13.2.11)
( zx )H
P ( xx )H
P
( yx )H
x
y
Рис.1
Так, силы, действующие нормально к граням кубика, очевидно,
представляют из себя магнитные давления и равны:
xx H 1 H x2 1 H 2 ,
4
2
1 2 1 2
yy H
H y H ,
4
2
zz H 1 H z2 1 H 2 .
4
2
Недиагональные элементы тензора напряжений, очевидно, представляют
собой касательные силы, действующие на грани единичного кубика:
xy H yx H 41 H x H y ,
xz H zx H 1 H x H z ,
(13.2.12)
4
yz H yz H 41 H y H z .
Пусть постоянное магнитное поле направлено вдоль оси Z то есть
H z H .Представим себе, что элементарные кубики нанизаны на соседние
магнитные силовые линии. Тогда взаимодействие магнитного поля с веществом
можно в духе Максвелла представить в виде отталкивания друг от друга
H2
H2
магнитных силовых линий с силой P
и их натяжения с силой 2 P
.
8
4
В однородном магнитном поле эти силы, действующие на соседние
элементы объема, взаимно компенсируются и не приводят к их взаимному
262
перемещению. Не скомпенсированные силы, приводящие к движению
вещества, возникают только тогда, когда существуют градиенты магнитного
поля и определяются по общему правилу:
f i H 1 ik H .
x k
Здесь, f i H i -ая компонента силы, действующей со стороны
магнитного поля на единицу массы вещества. Таким образом, если
пользоваться наглядным представлением об отталкивании магнитных силовых
линий и их натяжении, то можно сказать, что магнитные силовые линии всегда
стремятся выпрямиться или сжаться (если они замкнутые) вследствие их
натяжения, а их распределение в веществе стремится стать однородным
вследствие их взаимного отталкивания.
Таким образом, сила, действующая на единицу массы проводящей
жидкости со стороны магнитного поля, равна ( 1 ):
( ik ) H
1
1 2
f i H 1
H i H k H ik .
x k
4 x k
2
По аналогии с предыдущим вычислением имеем:
1
HdivH (H rotH) 1 H rotH .
fH
4
4
Согласно уравнениям Максвелла (13.1.6) получаем:
1
fH
(J H ) .
(13.2.13)
C
Таким образом, в уравнении движение Навье Стокса должен быть
добавлен еще один член (13.2.13), представляющий собой массовую силу,
действующую со стороны магнитного поля на движущуюся проводящую
жидкость.
Рассмотрим остальные уравнения полной системы уравнений движения
вязкой проводящей жидкости.
Очевидно, что уравнение непрерывности, как уравнение сохранения
вещества полностью сохранит свой вид:
divυ 0 .
(13.2.14)
t
Обратимся к уравнению сохранения внутренней энергии, для
непроводящей жидкости имели:
d
вн divq ik i , ik p ik ~ik .
dt
x k
Из последнего уравнения следует, что внутренняя энергия единицы
объема непроводящей жидкости изменяется вследствие притока тепла извне в
эту единицу объема, а также вследствие его сжатия и диссипации в нем
механической энергии из-за вязкости жидкости.
263
В проводящей жидкости появляется еще один источник изменения
внутренней энергии единицы объема жидкости - это джоулевы потери.
Джоулевы потери в единице объема проводящей жидкости равны:
J2
C2
2
Q ДЖ
rot
H
.
(13.2.15)
16 2
С учетом (13.2.13) и (13.2.15) уравнения движения проводящей жидкости
в магнитном поле имеют вид:
υ
1
1
2
1
υ υ p υ graddivυ
(H rotH ) f ,
1.
t
3
4
d вн
i
C2
2
2.
divq ik
rot
H
; ik p ik ~ik ,
2
dt
X k 16
divυ 0 ,
3.
(13.2.16)
t
4
4
1
J
E (υH) ,
4. rotH
C
C
C
1 H
5. rotE 1
.
C t
В уравнении 1 системы
(13.2.16)
массовая
сила
не
fэлектромагнитного происхождения, например сила тяжести. В 2 системы
(13.2.16) I . K - тензор напряжений не проводящей жидкости
определяемый соотношениями (13.2.7). Система
(13.2.16) содержит 11
уравнений для нахождения 16 неизвестных υ, E, H, p, , q, ВН . Вместе с
калорическим уравнением состояния ВН f p, и термическим уравнением
состояния p f , t система
(13.2.16)
полностью
определяет
механические термодинамические характеристики проводящей жидкости
движущейся в магнитном поле. Для ее решения необходимо задать четыре
феноменологических коэффициента - , - коэффициенты вязкости, коэффициент теплопроводности и - проводимость жидкости.
Решения системы должны удовлетворять дополнительным условиям:
(13.2.17)
divE 0 , divH 0 .
13.2.3. Граничные условия
Запишем наиболее характерные граничные условия.
1.На неподвижной твердой поверхности υ 0 . Если тело движется в
жидкости со скоростью U , то в каждой точке поверхности тела должно
выполняться условие: υ U .
2. На границе двух несмешивающихся проводящих жидкостей:
4
H1.t H1.t
J.
E1.t E 2.t ,
H1.n H 2.n ,
C
264
В последнем выражении J - плотность поверхностного тока на границе
жидкостей.
Из 4 и 5 уравнений системы (13.2.16) можно исключить напряженность
электрического поля E . Для этого возьмем операцию rot от обеих частей
уравнения 4 системы (13.2.16):
4
1
rotrotH
rotE rot(υ H ) ,
C
C
поскольку rotrot graddiv .Получаем:
4 H 4
graddivH H 2
2 rot(υ H) .
C t
C
Последнее соотношение, так как divH 0 можно записать в следующем
виде:
H
C2
rot(υ H )
H .
(13.2.18)
t
4
Если не интересоваться напряженностью электрического поля, то тогда полная
система уравнений будет состоять из уравнений 1, 2, 3 системы (13.2.16)и
уравнения(13.2.18). В этом случае будем иметь лишь 8 уравнений с 13
неизвестными. Если из этой системы найдена напряженность магнитного поля,
как функция координат и времени, то напряженность электрического поля при
необходимости может быть найдена из уравнения 5 системы (13.2.16).
Для несжимаемой жидкости уравнения системы (13.2.16) упрощаются.
Для несжимаемой жидкости имеем:
2
i 1 i k
.
ik
divυ 0 ,
X k 2 X k X i
В частности уравнение движения примет вид:
υ
1
H2
1
HH υ .
υ υ p
t
8 4
Здесь использована векторная формула:
1
(H rotH) H 2 H H .
2
13.2.4 Тензор плотности потока импульса
Тензор плотности потока импульса, очевидно, имеет вид:
1
1 2
ik i k ik ik H i k p ik ~ik
H i H k H ik .
4
2
(13.2.19)
~
Здесь ik - тензор вязких напряжений в обычной гидродинамике. Здесь
опущен тензор электрических напряжений ik E , как указывалось выше, в
проводящей жидкости не может быть сколько-нибудь значительных
электрических полей.
265
13.2.5. Вектор Умова
Вектор плотности потока энергии – вектор Умова в обычной
гидродинамике имеет вид:
(13.2.20)
I k k q k i ik .
В выражении (13.2.20) вн пот кин - полная энергия единицы
массы жидкости, q K - плотность потока тепла, ik - тензор напряжений. В
магнитной гидродинамике к указанным в (13.2.20) членам следует добавить
плотность потока электромагнитной энергии – вектор Пойтинга:
C
S
(E H ) .
(13.2.21)
4
Тогда в магнитной гидродинамике вектор плотности потока полной
энергии будет иметь вид:
I k k q k i ik S k .
В формуле (13.2.21) E может быть выражена через H при помощи
уравнений 1,5 системы(13.1.6). Имеем:
C
1
E
rotH (υ H) .
4
C
Подставляя последнее выражение в (13.2.21) и добавляя полученное к
правой части (13.2.20) имеем:
2
1
H (υ H)k C 2 (H rotH) k . (13.2.22)
I k k q k i ik
4
16
Выражение (13.2.22) представляет собой вектор Умова – вектор
плотности потока полной энергии в магнитной гидродинамике. Поскольку
H2
плотность магнитной энергии единицы объема равна
, то полная энергия
8
H2
единицы объема в магнитной гидродинамике будет равна:
. Поэтому
8
закон сохранения полной энергии запишется в виде:
H2
divI .
(13.2.23)
t
8
Где вектор I определен выражением (13.2.22).
Трудность понимания процессов, происходящих в проводящей жидкости,
движущейся в магнитном поле, заключается в том, что здесь нарушаются
обычные причинные связи, известные нам из лабораторной практики.
В обычной лабораторной практике причинная связь явлений заключается
в следующем: некоторая ЭДС определяет электрический ток, ток в свою
очередь определяет магнитное поле и т.д.
В магнитной гидродинамике причинная связь чаще следующая:
движущаяся жидкость изменяет магнитное поле, изменение магнитного поля,
согласно уравнениям Максвелла, вызывает электрическое поле, определяющее
ток, который, в свою очередь, создает магнитное поле, влияющее на движение
жидкости.
266
13.3. Принцип вмороженности магнитных силовых линий
Рассмотрим принцип, формулировка и доказательство которого
принадлежит Альфену. Этот принцип играет большую роль в создании тех
немногих образных представлений, которые возможны в магнитной
гидродинамике.
Рассмотрим уравнение (13.2.18):
H
C2
rot(υ H )
H .
t
4
Если проводимость - очень велика, то последним членом в уравнении
(13.2.18) можно пренебречь. Таким образом, при из уравнения (13.2.18)
получаем следующее уравнение:
H
rot(υ H ) .
(13.3.24)
t
Преобразуем правую часть уравнения (13.3.24):
roti (υ H ) ikl
(υ H ) l ikl
lmn m H n lik lmn
m H n
x k
x k
x k
H n
m
H k
i
H i
k
i
Hm
Hk
k
Hi
x k
x k
x k
x k
x k
x k
Из последнего соотношения следует векторная формула:
rotυ H υdivH H υ υ H Hdivυ .
Поскольку divH 0 , то уравнение (13.3.24) можно переписать в виде:
H
H υ υ H Hdivυ .
(13.3.25)
t
Из уравнения непрерывности имеем:
1 1
divυ
υ divυ ; div υ
υ .
t
t
t
Подставляя последнее выражение в (13.3.25), получим:
H
H
H υ υ H
.
(13.3.26)
t
t
Рассмотрим выражение:
H
H 1 H H 1
2
υ H 2 υ
υ
t
t t
(13.3.27)
1 H 1
1 H
υ H
υ .
t
t
Комбинируя (13.3.27) и (13.3.26) получим:
1 H
H 1 H 1
υ H
H υ υ H .
υ
t
t
t
Сократив члены в последнем выражении имеем:
im kn in km m
267
d H H
H H
(13.3.28)
υ .
υ υ;
t
dt
Рассмотрим смысл полученного выражения, Пусть в жидкости имеется
некоторая “жидкая” линия то есть линия, состоящая из одних и тех же частиц
(см. рис. 2):
υ dυ
l
l
l
l
l
l
υ
Рис. 2
Рассмотрим малый участок l этой жидкости. Так как скорости концов
участка l жидкой линии различны, то она будет растягиваться или сжиматься,
Найдем изменение длины выделенного участка l с течением времени,
Очевидно, что за время dt участок l получит приращение:
d l l ldt . Последнее соотношение можно записать в следующем
l
виде:
d l l l dt l n l dt .
l
Здесь n - единичный вектор отрезка l . Можно далее записать:
d l l l dt .
l n l ,
Или в векторном виде предыдущее выражение можно записать:
d l
l υ .
d l l υdt ,
(13.3.29)
dt
Сравнивая уравнения (13.3.29) и (13.3.28) приходим к заключению, что
H
величины
и l описываются одним и тем же уравнением. Если при этом
начальные и граничные условия к обоим уравнениям идентичны, то и решения
будут тождественны.
268
Отсюда можно сделать следующие заключения:
H
и l
были параллельны, то они останутся параллельными и во все последующие
моменты времени, а их величины будут изменяться пропорционально. Это в
свою очередь означает, что если две близкие жидкие частицы находились на
одной магнитной линии, то они останутся на ней во все последующие моменты
времени.
2.
Если расстояние между двумя жидкими частицами увеличивается,
H
то соответственно увеличивается и величина .
Таким образом, если перейти к конечным расстояниям между жидкими
частицами, то можно прийти к выводу, что, если вещество с бесконечной
проводимостью перемещается
в магнитном поле, то вместе с ним
перемещается и магнитное поле. Обзорно говоря, магнитные силовые линии
как бы «вклеены», «вморожены» в вещество. Если const , то вследствие
растяжения жидкой линии напряженность магнитного поля вдоль нее будет
увеличиваться и наоборот.
Рассмотрим некоторый жидкий контур (рис. 3) перпендикулярный
напряженности магнитного поля. Если теперь каким-либо образом стянуть этот
контур, то в силу вмороженности магнитных силовых линий стянется и
магнитное поле. Поскольку поток напряженности магнитного поля через этот
контур останется постоянным, то при сокращении контура напряженность поля
внутри его увеличивается, это явление используется при создании
сверхсильных импульсных магнитных полей. Вещество сжимается взрывом, в
результате чего магнитное поле на короткое время в некоторой ограниченной
области достигает сотен тысяч эрстед.
H
1.
Если в некоторый начальный момент времени вектора
Рис. 3
На этом же принципе основано устройство сверхпроводящих экранов.
Если есть необходимость какую-то часть экспериментального объема защитить
от воздействия внешних магнитных полей, то она окружается оболочкой из
сверхпроводника, охлаждаемого жидким гелием. И в этом случае магнитные
силовые линии внешних магнитных полей «приклеенные» к сверхпроводящей
оболочке не могут проникнуть внутрь экспериментального объема.
269
Эта идея используется в термоядерных устройствах для удержания и
сжатия плазмы. Пусть в плазме организованной в виде тонкого шнура течет
ток, вызванный некоторым сторонним источником (рис. 4.)
H
J
Рис. 4
Вокруг этого шнура с током образуется, соленоидальное магнитное поле.
В силу максвелловского натяжения магнитных силовых линий, силовые линии
соленоидального магнитного поля также стремятся сократиться. Действительно
натяжение магнитной силовой линии можно определить, пользуясь тензором
магнитных напряжений: если магнитное поле направлено вдоль оси Х, то
магнитная сила, действующая на единичную площадку перпендикулярную оси
Х равна:
2
1
1 2 Hx
.
xx H H x H x H x xx
4
2
8
Но в силу «вмороженности» магнитных силовых линий сокращаясь, они
увлекают за собой и вещество, сжимая его в еще более тонкий шнур.
Это сжатие будет проходить до тех пор, пока все увеличивающееся
давление в плазме шнура не будет равно магнитному давлению. Если в
предыдущем примере магнитное поле создается электрическим током в
сжимаемом веществе, то можно себе представить и устройства, в которых
сжатие вещества происходит некоторым независимым внешним магнитным
полем (магнитные «бутылки», «ловушки») (рис. 5.).
Рис. 5
В этом случае плазма помещается в нарастающее магнитное поле,
которое адиабатически сжимая ее, одновременно увеличивает ее плотность и
температуру.
Одни из возможных источников сильных магнитных полей в
космическом пространстве является столкновение двух областей межзвездного
газа обладающих до столкновения в силу некоторого направленного движения
заряженных частиц или по другим причинам слабыми магнитными полями.
В этом случае сжатие межзвездного газа в результате столкновения
приведет также и к концентрации магнитного поля в сравнительно небольших
областях, а значит, к увеличению в них напряженности магнитного поля.
270
Опираясь на принцип вмороженности магнитного поля в вещество не
трудно понять и запаздывание частиц, приходящих на землю вследствие
взрывов на солнце. Наблюдения показывают, что после некоторого взрыва на
солнце на землю обрушивается поток заряженных частиц спустя примерно 20
часов. Сами индивидуальные частицы движутся со скоростями достаточными
для прохождения расстояния от солнца до земли на несколько десятков минут.
По-видимому, во время взрывов от солнца отрываются большие «куски»
плазмы вместе с магнитным полем, магнитное поле удерживает частицы как в
«мешке», который движется к земле с некоторой гидродинамической
коллективной скоростью (1500км/сек) значительно меньшей, чем скорость
индивидуальных частиц в «мешке». Подходя к земле и нарушая ее магнитное
поле, заряженные частицы высыпаются на землю, производя магнитные бури и
полярные сияния.
13.4. Диффузия магнитного поля
Как видно из вывода принцип вмороженности магнитных силовых линий
позволивший образно рассмотреть ряд важных явлений следует из общих
уравнений электродинамики в том случае, когда среда имеет бесконечную
проводимость. Однако, все реальные среды (кроме сверхпроводников) имеют
конечную проводимость. Следовательно, любая реальная среда будет
просачиваться, диффундировать через магнитное поле, или магнитное поле
будет диффундировать в проводящую среду. Рассмотри для простоты
неподвижную проводящую среду υ 0 , тогда уравнение (13.2.18) примет
вид:
H
c2
.
(13.4.30)
t 4
Уравнение (13.4.30) имеет вид уравнения диффузии с коэффициентами
диффузии равным:
c2
DH
.
(13.4.31)
4
Из (13.4.31) следует, что коэффициент диффузии тем меньше, чем
больше проводимость среды и он равен нулю при бесконечной проводимости,
что и следует из принципа «вмороженности» магнитных силовых линий.
Если некоторое количество вещества М в начальный момент времени
сосредоточено в начале сферической системы координат в другом веществе, в
котором оно может диффундировать, то в последующие моменты времени его
концентрация в различных точках основной среды будет описываться
решением уравнения диффузии аналогичным уравнению (13.4.30).
Это решение, как указывалось выше, имеет вид:
r2
M
.
cr , t
exp
3
8Dt 2
4Dt
Очевидно, время релаксации концентрации будет равно:
271
tP
r2
.
4D
(13.4.32)
Пользуясь последним соотношением можно оценить время релаксации
магнитного поля в неподвижное вещество. Предположим, что внутри земли
возникло каким-либо образом некоторое магнитное поле. Тогда время в
течение, которого это поле достигает поверхности земли можно оценить по
формуле (13.4.32):
r 2
tP 2 .
c
Если бы земля имела проводимость равную проводимости меди, то из
последней формулы мы имели бы:
5 1017 4 1017
tP
2 1014 сек 10 7 лет
21
10
Для медного шара радиусом 100 см, имеем:
5 1017 10 4
tP
5сек
10 21
13.4.1 Задача Гартмана
Рассмотрим установившееся движение
проводящей несжимаемой
жидкости между двумя параллельными бесконечными пластинами в
перпендикулярном магнитном поле напряженностью H 0 . Будем полагать, что
движение вызывается градиентом давления направленным вдоль пластин
(рис.6.).
z
H0
+a
0
x
-a
Рис. 6
Пусть расстояние между пластинами равно 2а. Движение жидкости
должно подчиняться следующим уравнениям:
1
1
(H rotH) ,
1. υ υ υ
4
C2
H 0 ,
2. rot(υ H )
4
(13.4.33)
272
3. divυ 0 ,
divH 0 .
Будем полагать, что скорость жидкости направлена вдоль пластин и
зависит лишь от координаты Z :
y 0,
z 0 .
x x (Z ) ,
В силу бесконечности пластин в направлении осей X и Y очевидно
напряженность магнитного поля может зависеть только от координаты Z. Тогда
задача может рассматриваться как плоская.
Hy 0,
H x H x (Z ) ,
H Z H Z (Z ) .
Спроектируем уравнение движения на оси координат:
H k
H i
(H rotH ) i H k
Hk
,
X i
X k
roti (υ H) i divH H i divυ υ H i H i
i
H i
k
.
x k
x k
Проектируя на оси X,Y,Z (H rotH) с учетом топологии движения
получаем:
H x
(H rotH) x H z
; (H rotH) y 0; (H rotH) z
z
H x
H x
H z
H z
Hx
Hz
Hz
Hx
.
z
z
z
z
Для проекций rot(υ H) получаем:
x
rot x (υ H ) H z
, rot y (υ H ) 0 , rot z (υ H) 0 .
z
Таким образом, имеем следующую систему уравнений:
2 x
H x
p
1
1.
H
,
z
x
4
z
z 2
p
0,
2.
y
H i υ H i
Hk
2
p
1 H x
3.
,
z
8 z
2
x
C2 Hx
4. H z
,
z
4 z 2
5. 0=0,
C 2 H z
0,
6.
4 z 2
7. 0=0,
H z
0.
8.
z
(13.4.34)
273
Решение системы проведем следующим образом: Из уравнения 8 системы
(13.4.34) имеем:
H Z
0 , H Z const H 0 .
(13.4.35)
Z
Тогда уравнение 6 системы (13.4.34) удовлетворяется тождественно. Из
уравнения 2 системы (13.4.34) следует:
p p( X , Y ) .
Из уравнения 3 системы (13.4.34) имеем:
H 2X
H 2X
P( X ) .
p
0 , p
(13.4.36)
8
Z
8
Далее дифференцируем уравнение 1 системы (13.4.34) по Z:
3 X
2H X 2 p
2 p
1
H 2X
P( X )
H0
;
ZX
4
8
Z 3
Z 2 XZ ZX
P H 2 X
0.
X Z Z X 8
Поэтому с учетом (13.4.35), (13.4.36), (13.4.37) и 4 уравнения (13.4.34) 1
уравнение (13.4.34) имеет вид:
3 X H 20 X
0 .
Z 3 C 2 Z
Последнее уравнение можно записать следующим образом:
d 3 1 d
C 2
2
0
.
(13.4.37)
dZ 3 2 dZ
H 2 0
Решение уравнения (13.4.37) имеет вид:
1
1
1
A exp rZ r 3 2 r 0 ; r1 0, r2 , r3 ,
Z
Z
A1 A2 exp A3 exp .
(13.4.38)
Постоянные A1 , A2 , A3 могут быть найдены из граничных условий:
0 .
Z a , 0 ,
Z 0 ,
Подставляя в решение (13.4.38), имеем систему уравнений для
нахождения постоянных A1 , A2 , A3 :
1. 0 A1 A2 A3 ,
a
a
2. 0 A1 A2 exp A3 exp ,
a
a
3. 0 A1 A2 exp A3 exp .
Из уравнений 2, 3 системы (13.4.39) имеем:
(13.4.39)
274
A3 A2 exp a A3 A2 exp a A3 A2 exp a exp a 0 A3 A2 .
Тогда уравнения 1, 2 системы (13.4.39) можно записать следующим
образом:
0 A1 2 A2 ,
(13.4.40)
a
0 A1 2 A2 ch .
Из (13.4.40) имеем:
a
0 ch
0
.
A1
A2 A3
,
(13.4.41)
a
a
1 ch
1 ch
Таким образом окончательно решение имеет вид:
V0
z
a
(13.4.42)
V
ch ch .
a
(ch 1)
Для нахождения Нх проинтегрируем один раз уравнение 4 (13.4.34):
H x
4H 0
4H 0 V0 a
z
V
A
ch ch . (13.4.43)
x
2
2
a
z
c
c
ch 1
В выражении (13.4.43) постоянная A не зависит от z. Но т.к. Нх не зависит
от х то А не должна зависеть от координаты х. Т.е. постоянная А не зависит от
координат. Обозначая коэффициент перед квадратичными скобками в (13.4.43)
через в результате интегрирования (13.4.43) имеем:
a
z
H x zch sh Az C .
(13.4.44)
Поскольку на границе z=a нет ни каких поверхностных токов
проводимости, то при z=a должна быть непрерывна тангенциальная
составляющая напряженности магнитного поля. Кроме того из симметрии
задачи ясно, что Нх=0 при z=0.
Таким образом напряженность магнитного поля должна удовлетворять
следующим граничным условиям:
1. z=a Нх=0 ,
2. z=0 Нх=0 .
Из второго граничного условия следует: С=0. Первое граничное условие
ведет к результату:
a
a
A ach sh .
a
Подставляя полученное значение постоянной А в (13.4.44) имеем:
275
a
a
z
H x sh sh .
a
Используя выражение для и окончательно имеем:
(13.4.44’)
2V0
V0H 0 2 a
z H 0 a
z
ch
sh .
sh ch
a
a
4 a
a
a
2
2
(ch 1)
c (ch 1)
(13.4.45)
Величина V0 зависит от градиента давления. Эта связь может быть
найдена из уравнения 1(13.4.34). Дифференцируя (13.4.42) и используя
(13.4.44’) имеем:
z sh a sh z
a
4
.
H x V0
(13.4.46)
a
c
ch 1
2
Из (13.4.46), подставляя H 0 2 c 2 имеем:
a
1
2 ch
a
P
V0
.
(13.4.47)
a a x
sh
Обычный гидродинамический результат из (13.4.47) можно получить в
том случае когда жидкость не взаимодействует с магнитным полем. Это будет
тогда, когда или отсутствует магнитное поле, или когда проводимость
жидкости равна нулю. (Н=0 или =0). В этом случае , а a/0. В этом
пределе раскрывая неопределенность в (13.4.47) по правилу Лопиталя получаем
известный результат для плоского течения Пуазейля. (h=2a):
a 2 P
.
V0
2 x
Точно также из формулы (13.4.42) при снова имеем результат
обычной гидродинамики:
a
z a
ch ch
z 2
a
V V0
V 0 1 2 .
a
a
0
a
ch 1
Из формул (13.4.36) и (13.4.45) следует, что только при z=a и z=0
давление в жидкости равно гидростатическому давлению. Во всех остальных
точках поперечного сечения плоской трубы остается неизменной лишь сумма
H2
p x
. Следовательно, в этих точках недостаток гидростатического
8
давления восполняется магнитным давлением так, что сумма их остается
постоянной в данном сечении.
P
x
276
1разлагая в ряд числитель и знаменатель (13.4.47) с
2
точностью до a
получим:
2
2
a 2
1 a 2 dp
a 2
1 a H 0 dp
. (13.4.48)
V0
1
1
2 12 2 dx
2 12 c 2 dx
Из последнего выражения видно, что при заданном градиенте
гидростатического давления при увеличении Н0 или скорость уменьшается,
т.е. магнитное поле препятствует движению проводящей жидкости и это
сопротивление тем больше, чем больше проводимость жидкости и
напряженность магнитного поля. Профиль скорости становится более плоским
как при турбулентном движении (рис. 7), а магнитные силовые линии
изгибаются (натягиваются) в направлении движения жидкости.
При a
H0
H=0
H
H0
Рис.7
13.5.1 Магнитогидродинамические машины. Электромагнитные
насосы
В последнее время широкое развитие для перекачки проводящих
жидкостей получили электромагнитные насосы. Они оказались особенно
необходимыми в атомных реакторах с жидкими металлическими
теплоносителями типа калия, натрия и их смесей. Преимущества
электромагнитных насосов, которые обеспечили их широкое развитие и
применение являются следующие.
Чрезвычайная простота конструкции и простота регулировки их
производительности как по величине, так и по направлению.
Абсолютная герметичность насоса, что очень важно при перекачке
вредных агрессивных или взрывоопасных веществ. Так утечка жидкого натрия
из контура охлаждения создает большую пожарную опасность, т.к. при
277
соединении с водой (например, находящейся в теплообменнике) реакция идет
со взрывом.
Простота монтажа насоса в магистральном трубопроводе без создания
дополнительных гидравлических сопротивлений.
Все электромагнитные насосы можно разделить на два класса –
индукционные насосы и насосы прямого действия (Фарадеевского типа).
Принцип действия индукционного насоса можно понять следующим образом.
Представим себе, что статор асинхронного двигателя разрезан и
развернут вдоль трубопровода с проводящей жидкостью. Два таких
развернутых статора, по обе стороны трубопровода и создают индукционный
насос (рис. 8).
Рис. 8
Ясно, что часть трубопровода находящаяся между статорами должна
быть сделана из немагнитного материала с малой электропроводностью
(например тонкая нержавеющая сталь). Если обмотки в неразрезанном статоре
при пропускании через них переменного тока создают вращающееся магнитное
поле, которое индукционно увлекает ротор, то в разрезанных статорах
магнитное поле будет бегущим вдоль трубопровода. Бегущее магнитное поле
также индукционно увлекает проводящую жидкость в трубопроводе
прокачивая ее по трубопроводу в том или ином направлении в зависимости от
направления «бега» магнитного поля.
Индукционный насос можно осуществить следующим образом.
Если в неразрезанный статор асинхронного движения поставить стакан
со ртутью, то при включении статора его вращающееся магнитное поле будет
увлекать ртуть в стакане и придаст ей вращательное движение. Теперь можно
представить, что статор одет на трубопровод, а внутри трубопровода находится
винт (рис.9). Тогда вращающаяся проводящая жидкость будет «ввинчиваться»
создавая поступательное движение жидкости в трубопроводе.
278
Рис. 9
К сожалению КПД индукционных насосов очень мал и составляет 2-3%.
Т.к. велики потери в стенках трубопровода и самой жидкости на ее нагрев.
Принцип действия электромагнитных насосов прямого действия ясен из
рис. 10.
b
H
2a
b
J
Рис. 10
В насосе прямого действия магнитное поле Н постоянно и создается или
электромагнитом, или постоянным магнитом. Между полосами расположен
прямоугольный
участок
трубопровода
с
проводящей
жидкостью.
Неперпендикулярно магнитному полю через большую поверхность
трубопровода,
а
следовательно
и
жидкость,
течет
ток
J
создаваемый также независимым источником тока. Если постоянное магнитное
поле создается электромагнитом, то ток J и ток электромагнита могут
создаваться одним и тем же источником тока. Ясно, что боковые поверхности
прямоугольной трубы должны быть изготовлены из хорошо проводящего
магнитного материала, в то время как поверхности перпендикулярные
магнитному полю – из немагнитного материала обладающего плохой
проводимостью. Коэффициент полезного действия насосов прямого действия
значительно выше чем индукционных насосов и составляет 25-30%. Причем в
этот КПД входит и КПД выпрямительных устройств источников питания.
Сделаем грубый, ориентировочный расчет насоса прямого действия.
Будем полагать, что магнитное поле постоянно, однородно в объеме abl и
определяется только полем постоянного магнита. Магнитное поле
индукционных токов мало и слабо влияет на магнитное поле постоянного
магнита. Будем также полагать, что b>>a, тогда задачу о движении жидкости в
279
прямоугольном канале можно рассматривать как плоскую, как задачу о
движении проводящей жидкости между двумя параллельными бесконечными
плоскостями (рис. 11).
Z
a
H0
Рис. 11
X
Пусть в трубопроводе нет градиента гидростатического давления не
электромагнитного происхождения. Тогда в стационарном случае имеем
следующее уравнение движения для несжимаемой жидкости:
2V x 1
(13.5.49)
H0J .
2
z 2
Решая обычную задачу Пуазейля мы имели точно такое же уравнение с
H J
теми же граничными условиями для скорости, только вместо 0
мы имели
c
p . Таким образом можно воспользоваться прежним решением заменяя
x
H J
везде p на 0
.
c
x
В частности для объемного расхода жидкости через единицу ширины
плоской щели имели:
a3 H 0 J
.
QV
12 C
Следовательно, расход проводящей жидкости через трубопровод
шириной “b” (пренебрегая торможением жидкости боковыми поверхностями
трубы) будет равен:
a3b H 0 J
.
13.5.50)
QV
12 C
Сделаем примерный расчет насоса прокачивающего смесь 56% Na + 44 %
K, применяемую в качестве теплоносителя в атомных реакторов. Приведем
исходные данные:
Н0=103, I=200 A. , (250 0C)=0,0346 пуаз. а=2 см, b=10 см, l=40 см.
Плотность тока равна:
I
едCGSE
J 3 10 9
.
la
см2
Подставляя вышеприведенные значения величин входящих в формулу
(13.5.50) для объемного расхода получаем:
280
3
a3bH0 I 3 109 4 10 103 200 3 109
л
4 см
.
QV
5
10
50
12lac
12 0,035 40 3 1010
с
с
средняя скорость будет равна:
Q 50 10 3
м
25 .
QV ba
ba
2 10
с
электродинамическая сила эквивалентна следующему перепаду давления на
длине l.
H0J
10 3 200 3 10 9
дин
Па
p p H 0 J
l
10 4 2 0.01 2 .
, p
10
c
3 10 2
см
м
x
l
c
Конечно, приведенный расчет претендует, лишь на порядок цифр тук как
мы не учитывали магнитное поле создаваемое самим током, что существенно
будет снижать расход.
При расчете реальной гидравлической системы, разумеется, необходимо
знать ее гидравлическое сопротивление и расход жидкости в ней будет в
существенной мере определяться именно этим сопротивлением системы.
13.5.2 Магнитогидродинамический генератор – МГД
Очевидно, электромагнитный насос прямого действия можно обратить.
То есть если по трубе (рис. 10) при помощи некоторой электромагнитной силы
двигать проводящую жидкость, то на боковых поверхностях трубы возникает
разность потенциалов. Если теперь эти боковые поверхности соединить с
внешним сопротивлением, то через него потечет ток. В этом случае устройство
(рис. 10) будет работать как генератор электрической энергии называемый
магнитогидродинамическим генератором (МГД). Преимущество МГД перед
существующими генераторами очевидно. В МГД нет движущихся частей; нет
паровых турбин и как показывают расчеты КПД магнитогидродинамического
генератора большой мощности может достигать 60% против 40% у
существующих электростанций. Поэтому проблема создания МГД большой
мощности в настоящее время интенсивно разрабатывается как у нас так и за
рубежом.
Оценим
мощность
развиваемую
магнитогидродинамическим
генератором. В устройстве (рис. 10) υ H без внешней цепи напряженность
электрического поля будет равна:
1
1
J E υ H 0 , E vH 0 .
(13.5.51)
c
c
Если боковые поверхности трубы (рис. 9) соединить с внешней нагрузкой
сопротивлением RH, то в электрической цепи потечет ток равный:
U
I
.
R ВН R Н
Мощность потребляемая во внешней цепи будет равна:
U 2 RH
2
W I RH
.
( R ВН R Н ) 2
281
Внутреннее сопротивление генератора определяется проводимостью
столба газа площадью la и длиной b. Поэтому сопротивление RВН равно:
1
la
b
R BH
.
R BH
b
la
Если RBH=RH (при заданном U максимальная мощность W), то с учетом
(13.5.51) имеем:
U 2 H 02V
W
, V lab .
(13.5.52)
4c 2
Электрическая энергия может быть получена только за счет торможения
и сжатия вещества. Если бы внутри трубы постоянного сечения двигалась бы
проводящая несжимаемая жидкость (например, ртуть), то в силу
несжимаемости жидкости или непрерывности расхода (постоянства скорости
движения жидкости) такое устройство не могло бы служить генератором
электрической энергии. Поэтому рабочим веществом в МГД может служить
только газ.
Как следует из формулы (13.5.52) рабочий газ должен обладать
определенной
проводимостью.
Следовательно,
это
должен
быть
ионизированный газ.
Достаточную ионизацию газа можно получить или нагревая его до
высоких температур (36)103 К или добавляя к нему легко ионизирующиеся
присадки. В качестве присадок могут служить вещества с малым потенциалом
ионизации, например, пары цезия. Так потенциал ионизации азота равен 14,5
эв., кислорода – 13,5 эв., а цезия – 3,88 эв.. из всех этих элементов цезий имеет
наименьший потенциал ионизации. Достаточная ионизация воздуха, а
следовательно его достаточная проводимость может быть достигнута только
при очень высоких температурах порядка (5-6)103 К. но в настоящее время не
существует конструкционных материалов, который бы длительное время
выдерживали столь высокую температуру. Именно с целью снижения
температуры газа для обеспечения его достаточной проводимостью и
необходимо делать легкоионизирующиеся присадки. Но поскольку цезий
дорогой материал, то очевидно, что газ с присадкой должен циркулироваться в
некотором замкнутом контуре обеспечивающим сохранность присадки.
Сделаем ориентировочный расчет. Пусть МГД имеет следующие
характеристики:
см
1
4
5
,
12
м
Н0=10 э , =1000
=10 с
l=100см , а=10см , =10 с .
с
Тогда напряжение на боковых пластинах МГД будет равно:
100 10 5 10 4 10
10 300
1
CGSE
1000 В .
U=bE=b H0=
с
3 1010
3
3
Мощность генератора:
1012 1010 108 10 5
эрг
W
2,5 1013
2,5 10 6 ВТ=2500кВТ .
20
4 9 10
с
282
Из формулы (13.5.52) следует, что наряду с увеличением проводимости
рабочего газа необходимо увеличивать его скорость и напряженность
магнитного поля. В настоящее время конструкторы стремятся использовать
явление сверхпроводимости для создания сильных постоянных магнитных
полей.
Формула (13.5.52) может использоваться только для очень грубых
оценок, т.к. при ее выводе мы не учитывали много факторов сильно влияющих
на эффективность работы МГД (магнитное поле тока в электронном
промежутке, торможение газа и т.д.).
Реальные магнитогидродинамические генераторы состоят их камеры
сгорания или нагрева рабочего газа с присоединенным к ней сопло Лаваля в
котором газ ускоряется. Сопло Лаваля помещено в поперечное постоянное
магнитное поле. Внутри сопла также смонтированы токоприемные пластины к
которым и подключается внешняя электрическая нагрузка.
5.3 Плазменные двигатели
Тяга создаваемая реактивным двигателем равна M, где М – масса
вещества, отбрасываемая двигателем в 1 секунду, - скорость с которой эта
масса отбрасывается. Следовательно, для создания максимальной тяги при
заданном количестве вещества она должна отбрасываться двигателем с
максимальной скоростью. Если воспользоваться газодинамическим способом
ускорения газового потока, то скорость вытекающего газа из сопла двигателя
не может быть больше максимальной скорости:
RT0 1
1
.
(13.5.53)
max c 0
1
M 1
Из формулы (13.5.53) видно, что для увеличения скорости истечения газа
необходимо увеличивать его температуру Т0 и использовать газ с малым
молекулярным весом. Формула (13.5.53) приведена лишь затем, чтобы
показать, что существует предел увеличения скорости газодинамическими
средствами. В действительности как показывалось в разделе “волна
разряжения” скорость max может быть достигнута при истечении в вакуум при
абсолютной температуре вытекающего газа равной нулю. При этом поток
должен повернуть на определенный угол так, что реактивная тяга,
направленная вдоль двигателя, некоторой части струи будет равна нулю или
даже отрицательной.
Однако существует возможность увеличить скорость отбрасываемого
вещества экспериментальными способами. Это можно сделать в устройстве
типа электромагнитного насоса прямого действия если газ является достаточно
хорошо проводящей плазмой. Если же в двигателе каким-либо способом
организовать источник ионов, то их можно разогнать то их можно разогнать в
электростатическом поле практически до субсветовых скоростей. Конечно как
в том, так и в другом случае на борту космического корабля должен быть
достаточно мощный источник электрической энергии.
283
6. Спонтанное магнитное поле при турбулентном движении
проводящей жидкости
Из принципа ”вмороженности” магнитных силовых линий в вещество
следует, что магнитное поле будет препятствовать возникновению
турбулентного режима течения проводящей жидкости. Так если поле
направлено вдоль трубы по которой течет проводящая жидкость то очевидно
что возникновение поперечных составляющих скорости вследствие натяжения
при этом магнитных силовых линий будет затруднено, а, следовательно
переход от ламинарного режима течения к турбулентному будет происходить
при больших числах Рейнольдса нежели в непроводящей жидкости или в
проводящей жидкости, но без магнитного поля. Точно также магнитное поле
направленное вдоль танцевального разрыва в проводящей жидкости
увеличивает его устойчивость.
Турбулентное движение проводящей жидкости обладает интересным
свойством, свойством возникновения в нем сравнительно больших магнитных
полей.
В проводящей жидкости всегда существуют эффекты приводящие к
возникновению слабых магнитных полей, например магнитомеханический
эффект или флуктуации электрического заряда.
Рассмотрим, как будет вести себя в дальнейшем раз возникшее слабое
магнитное поле при турбулентном движении проводящей жидкости.
Для этого, очевидно, мы должны рассмотреть два конкурирующих
эффекта.
При движении жидкости в возникшем слабом магнитном поле в ней
будут наводиться индукционные токи, а, следовательно, будет происходить
диссипация электрической энергии из-за джоулевых потерь, что в конечном
счете должно уменьшать спонтанно возникшее магнитное поле.
С другой стороны поле будет стремиться увеличиться в силу принципа
”вмороженности” магнитных силовых линий, поскольку оно пропорционально
расстоянию между двумя близкими жидкими частицами, а это расстояние при
турбулентном движении в среднем всегда увеличивается с течением времени.
Очевидно, что при некоторых условиях обе тенденции могут оказаться
равносильными и в турбулентной жидкости возникнет магнитное поле
определенной напряженности.
Для оценки этой напряженности рассмотрим уравнения движения.
До тех пор пока напряженность магнитного поля мала в уравнении
движения Навье-Стокса для несжимаемой жидкости можно пренебречь
магнитной массовой силой как квадратичной по малой величине Н. Тогда
уравнение Навье-Стокса можно, как указывалось выше записать в следующем
виде:
1
ω
rotυ ω ω , ω rotυ .
(13.6.54)
t
2
В магнитной гидродинамике для напряженности магнитного поля имеем
следующее уравнение:
284
H
c2
rotυ H
H .
(13.6.55)
t
4
Сравнивая уравнения (13.6.54) и (13.6.55) обнаруживаем, что эти
2
уравнения совершенно идентичны, а если с
, то и тождественны при
4
этой замене ω и H .
Следовательно, должны учитывать решения этих уравнений вида:
ω =const H .
В этом случае при постоянной завихренности может присутствовать и
стационарное магнитное поле. При этом ни завихренность ни магнитное поле
не увеличиваются и не убывают.
Сама величина этого стационарного (в турбулентном смысле) поля может
быть определена лишь из решения уравнений (13.6.54) и (13.6.55).
Однако, очевидно можно сделать следующее заключение. Если
2
c 4 , то диссипация магнитного поля через индукционные токи (
2
Q J ) будет меньше и магнитное поле может возрастать даже благодаря
дж
растяжению магнитных силовых линий.
2
Если же c
, то напряженность магнитного поля должна убывать.
4
Таким образом, для того, чтобы напряженность спонтанного магнитного
поля при турбулентном движении проводящей жидкости возрастала
необходимо, чтобы выполнялось условие:
4
1 .
(13.6.56)
с2
Возрастание напряженности магнитного поля не может быть
беспредельной, т.к. сильное магнитное поле в свою очередь будет подавлять
механическое турбулентное движение, и наше рассмотрение будет
несправедливым. Поскольку в уравнении Навье-Стокса уже нельзя будет
пренебрегать магнитной массовой силой.
Из общих физических соображений ясно, что максимальная
напряженность магнитного поля не должна превышать величину при которой
энергия единицы объема магнитного поля примерно равна кинетической
энергии единицы объема движущейся жидкости.
2
Н max
2
.
8
2
Рассмотренный механизм позволяет объяснить возникновение
значительных магнитных полей во вселенной и в частности на Солнце.
К сожалению проверить сделанные выше выводы в земных условиях
2
довольно затруднительно, т.к. например для ртути (=1016 1
, =10-7 м )
с
сек
имеем:
285
4
2
10 10 7 1016
17
10 7 1 .
с
10
Однако во вселенной в достаточно разреженных (малая плотность)
ионизированных (большая проводимость) газовых скоплениях условие (13.6.56)
может выполняться, и в этом случае в газовых скоплениях и на поверхности
Солнца могут существовать значительные магнитные поля напряженностью в
десятки и сотни эрстед.
7. Одномерное движение проводящей сжимаемой жидкости в
поперечном магнитном поле
7.1 Уравнение движения в магнитной гидродинамике
Рассмотрим одномерное движение проводящей сжимаемой жидкости в
поперечном магнитном поле (рис.12 ). Пусть ось Х направлена вдоль линии
тока, а ось Z перпендикулярно к ней. Пусть напряженность магнитного поля
имеет единственную компоненту перпендикулярную линии тока и,
следовательно, оси Х. Таким образом, топология движения определена
следующим образом:
z
z=0 ,
x=x(x) , y=0 ,
Hx=0 ,
Hy=0 ,
Hz=Hz(x)
HZ
x
Рис. 12
Будем полагать, что жидкость имеет бесконечную проводимость = и
является идеальной в гидродинамическом смысле (==0). В такой жидкости
не может происходить никаких диссипативных процессов ни вследствие
вязкости жидкости ни вследствие джоулевых потерь (S=const).
Уравнения движения такой жидкости имеет вид:
υ
1
1
H rotH ,
( υ )υ
1.
t
4
H
rotυ H ,
2.
(13.7.57)
t
divυ 0 .
3.
t
Как было показано выше из уравнений 2, 3 системы (13.7.57) следует:
H H
(13.7.58)
υ .
t
Проектируя уравнения 1 (13.7.57) и
(13.7.58) получим:
286
1.
x
H z
1
1
x x
Hz
,
t
x
x 4
x
(13.7.59)
Hz
0.
2.
t
Из второго уравнения системы (13.7.59) следует:
Hz
const b , H z b .
Тогда первое уравнение системы (13.7.59) можно записать в виде:
2
x 1 x 2
2b 2
1
1 H z
1
(13.7.60)
(P
) .
t
я x
x 8 x
ч
8
Из уравнения (13.7.60) не трудно видеть, что оно совсем не содержит
магнитного поля и имеет обычный гидродинамический вид, если в качестве
давления взять давление определяемое соотношением:
H2
2b 2
PP
P z .
(13.7.61)
8
8
Очевидно и все решения уравнения (13.7.60) можно получить из решений
обычного гидродинамического уравнения если в них вместо Р подставить P.
Этот результат почти очевиден, поскольку P - представляет собой полное
давление равное сумме гидростатического давления Р и магнитного давления
H z2
.
8
В частности, скорость звука или скорость распределения малых
возмущений вдоль оси Х представляющих из себя продольные волны сжатия
может быть определена по известной формуле:
P
2 b 2
2b 2
2
(13.7.62)
С Н
C
C 2 U 2 .
8
S 8
Из (13.7.62) следует, что скорость распространения малых возмущений в
проводящей жидкости () перпендикулярно магнитному полю возрастает на
величину U равную:
1
.
(13.7.63)
U Hz
4
Скорость U называется скоростью волн Альвена. Полученный результат
физически понятен. Скорость распространения упругих продольных волн в
проводящей жидкости в поперечном поле возрастает поскольку в силу
натяжения магнитных силовых линий упругость проводящей среды как бы
возрастает, что и ведет к увеличению скорости.
Хотя ртуть имеет конечную проводимость () по формуле (13.7.63)
можно оценить порядок скорости волн Альвена. При НZ=1000 э, =13 г 3
см
имеем:
287
1
75 см .
с
4 13
Для скорости звука в ртути добавка очень мала, однако для разряженного
вещества (ионосфера Земли, солнечная корона) скорость может оказаться
сравнимой со скоростью звука. Очевидно, на скорость распространения
продольных колебаний направленных вдоль магнитного поля последнее не
оказывает ни какого влияния.
Замечательно то, что в проводящей жидкости в магнитном поле могут
распространяться и поперечные волны. Если первоначально возмущение
перпендикулярно магнитным силовым линиям, то это возмущение
распространяется вдоль силовой линии как по резиновому натянутому шнуру,
что приведет (в силу «вмороженности» магнитных силовых линий) и
распространению поперечных колебаний и материальной проводящей среде.
Для вычисления скорости распространения колебаний распространения
поперечных колебаний воспользуемся аналогией.
Уравнение поперечных колебаний в направлении оси Z струны
расположенной вдоль оси X как известно имеет вид:
2U
2U
(13.7.64)
m 2 K 2 .
t
x
Здесь UZ - смещение точек струны в направлении оси Z, m – масса
струны на единицу длины, K – натяжение струны. По общему свойству
U 1000
m
волнового уравнения K
1
2
- есть скорость распространения волны вдоль оси
x.
1
K 2
(13.7.65)
Ct .
m
Рассмотрим вещество, находящееся около магнитной силовой линии в
прямоугольном параллелепипеде поперечным сечением (перпендикулярно
силовой линии) равным 1 см2.
Тогда в формуле (13.7.64) m=, а К – есть натяжение на единицу
H X2
площади, т,е. K
.
4
Поэтому скорость распространения поперечных колебаний проводящей
жидкости в магнитном поле равна:
1
.
(13.7.66)
Ct H x
4
В отличие от скорости распространения продольных колебаний, которая
складывается из обычной скорости звука и скорости волн Альвена скорость
распространения поперечных колебаний в невязкой жидкости с бесконечной
проводимостью является единственной возможностью.
288
7.2 Уравнение Бернулли в магнитной гидродинамике.
Уравнение (13.7.60) представляет проекцию уравнения Навье-Стокса в
магнитной гидродинамике на ось Х или линию тока, совпадающую с осью Х.
Для стационарного движения из (13.7.60) имеем:
2
x
1 P
1 H z2
1 P
1 2 2
(13.7.67)
b .
x 2
x 8 x
x 8 x
Поскольку ось Х совпадает с линией тока, то скорость жидкости имеет
единственную компоненту х , т.е. х2=2. по определению напряженность
магнитного поля так же имеет единственную компоненту, перпендикулярную
линии тока. Следовательно Нz2=Н2.
Правую часть уравнения (13.7.67) можно записать в виде:
1 P H 2
.
x x 4
В обычной термодинамике имеем:
1
dhT TdS dP .
В жидкости, лишенной трения и имеющей бесконечную проводимость
энтропия каждого индивидуального объема постоянна, поэтому имеем:
1 P
hT
.
x
x
Тогда уравнение (13.7.67) примет вид:
2
H 2
2
H2
hT
0
hT
const . (13.7.68)
x 2
4
2
4
В (13.7.68) постоянная не зависит от Х, т.е. она постоянна для
рассматриваемой линии тока. Уравнение (13.7.68) и есть уравнение Бернулли в
магнитной гидродинамике.
Последнему уравнению можно придать иной вид, если в качестве
давления взять полное давление P:
h=вн+ P V= BH
P
H2
.
8
Таким образом энтальпия в магнитной гидродинамике вследствие
2
изменения внутренней энергии на величину H
имеет вид:
8
H2
.
h hT
8
Подставляя в уравнение Бернулли (13.7.68) имеем:
2
H2
(13.7.69)
h
const .
2
8
Уравнение Бернулли в виде (13.7.69) представляет уравнение сохранения
энергии частицы жидкости единичной массы вдоль линии тока.
289
8. Ударные волны в магнитной гидродинамике
Для простоты рассмотрим прямую ударную волну в проводящей
сжигаемой жидкости при отсутствии вязкости и при бесконечной
проводимости. Рассмотрим лишь случай, когда напряженность магнитного
поля направлена параллельно линии разрыва или перпендикулярно линии тока
вещества.
На прямой ударной волне должны быть следующие величины:
- плотность потока вещества: 11 2 2 .
(13.8.70)
H 12
H 22
2
P2 2 2
- плотность потока импульса: P1 11
.(13.8.71)
8
8
12
H 12 22
H 22
- плотность потока энергии:
. (13.8.72)
h1T
h2T
2
41
2
4 2
Кроме того, в силу «вмороженности» магнитных силовых линий следует
соотношение:
H1 H 2
H
const
.
(13.8.73)
2
1 2
Таким образом, из (13.8.70) следует, что полученные выше формулы
будут справедливы и в магнитной газодинамике, если в них сделать замену:
H2
H2
Pi P
hT
PV .
,
,
h hT
1
8
8
1
В частности уравнение ударной адиабаты h1 h2 ( P2 P1 )(V1 V2 ) 0
2
будет иметь вид:
1
1
1
h1T h2T
( H 12V1 H 22V 2 ) (V1 V 2 )( P2 P1 )
(V1 V 2 )( H 22 H 12 ) 0 .
4
2
16
(13.8.74)
В уравнении (13.8.74) при помощи соотношения (13.8.73) везде можно Н2
заменить через Н1 и 2 . Таким образом уравнение будет зависеть лишь от
1
Н1, которое предполагается заданным. После громоздких преобразований
можно получить уравнение ударной адиабаты в магнитной гидродинамике в
следующем виде:
3
1 2
1 2 H 12 2
P1
P2
1
1 0 .
(13.8.75)
1 1 8 1
1 1
Не решая уравнений можно сделать некоторые качественные выводы.
Так как плотность газа за ударной волной растет, то из (13.8.73) следует, что за
ударной волной растет и напряженность магнитного поля. Поскольку
магнитное давление препятствует сжатию вещества, то очевидно скачек
плотности на прямой ударной волне в магнитном поле будет меньше, чем без
него. Следовательно меньше будет и скачек температуры и энтропии, т.к.
290
кинетическая энергия газа переходит не только в тепловую, но и в энергию
поля.
В косой ударной волне, если магнитные силовые линии пересекают
поверхность разрыва, то они преломляются на ней, приближаясь к поверхности
разрыва. При этом на поверхности косой ударной волны испытывают скачек не
только нормальные составляющие скорости движения газа, но и
потенциальные, что невозможно без поля. В этом случае поле влияет меньше на
сжатие и нагрев газа, чем в прямой ударной параллельной полю.