Структурный и кинематический анализ Механизмы двухцилиндрового четырехтактного двигателя внутреннего сгорания
реклама

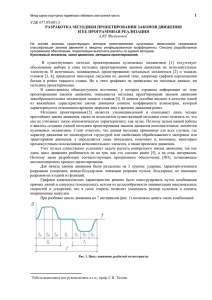
2 СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Кинематическая схема механизма построена в масштабе, в соответствии с рисунком 3. Рисунок 3 – Кинематическая схема механизма Определяем степень подвижности механизма по формуле Чебышева. 𝑊 = 3𝑛 − 2𝑝5 − 𝑝4 = 3 ∗ 5 − 2 ∗ 7 = 1 −1 Где n- число подвижных звеньев. P5 — число кинематических пар 5 класса. P4— число кинематических пар 4 класса. Следовательно, механизм имеет одну степень свободы. Структурный анализ по Ассуру. Выделим первичный механизм, в соответствии с рисунком 4: Рисунок 4 – Первичный механизм Структурные группы Ассура, в соответствии с рисунками 5, 6. Рисунок 5 – Структурная группа Ассура Рисунок 6 – Структурная группа Ассура Изм. Лист № докум. Подпись Дата 15.03.05.2020.008.007 ПЗ Лист 7 Механизм состоит из ведущего звена CОА, двух поводковых групп второго класса, второго порядка, первого и второго видов: и Кинематическая схема механизма построена в масштабе: м 𝐾𝑆 = 0,001 мм Построение начинаем от входного звена, т.е. кривошипа ОА. Из точки Р, принятой за полюс плана скоростей, откладываем в направлении вращения кривошипа ОА вектор скорости точки А. 𝑉𝑐 = 𝑉𝐴 = 2𝜋𝑛1 ∗ 𝑙𝑂𝐴 = 2 ∗ 3,14 ∗ 75 ∗ 0.05 = 23,55 где 2𝜋𝑛1 - угловая скорость. vA—скорость точки А кривошипа ОА . Построение плана скоростей группы Ассура класса 2-го вида (звеньев 2 и 3) производим по уравнению: * * * (1.7) V B V A V BA где VBA- скорость точки В звена 2 во вращательном движении относительно точки А направлена перпендикулярно оси звена АВ; VB-скорость точки В-ползуна 3, направлена вдоль оси ОВ. Из точки а проводим линию, перпендикулярную оси ОВ, а из полюса Р плана скоростей- линию, параллельную оси ОВ. Точка b пересечения этих линий дает конец вектора искомой скорости VB. Построение планов скоростей для другой группы Ассура класса 2-го вида (звеньев 4 и 5) производится согласно уравнению: 𝑉𝐷 = 𝑉𝐶 + 𝑉𝐶𝐷 где VCD- скорость точки C звена 4 во вращательном движении относительно точки C, направлена перпендикулярно оси звена CD; VD- скорость точки D ползуна 5, направлена вдоль оси ОD. Масштаб планов скоростей вычисляем по формуле: 𝑉𝐴 23,55 𝜇𝑉 = = = 0,5 м/мм 𝑝𝑎 47,1 Скорости точек S2 и S4 определяем по правилу подобия, так как ls2=lAB/3 и lS4=lAB/3, то и отрезки as2 и as4 на плане скоростей будут равны: 𝑎𝑏 𝑎𝑠2 = 𝑎𝑠4 = 3 Найденное значение точки s2 и s4 соединяем с полюсом Р. Истинное значение скорости, для 1-го положения, находим по формуле: 𝑉𝐵 = 𝜇𝑉 ∗ 𝑝𝑏 = 0,5 ∗ 18,41 = 9,205 м/с 𝑉𝐵𝐴 = 𝜇𝑉 ∗ 𝑏𝑎 = 0,5 ∗ 41,11 = 20,555 м/с 𝑉𝐷 = 𝜇𝑉 ∗ 𝑝𝑑 = 0,5 ∗ 18,41 = 9,205 м/с 𝑉𝐶𝐷 = 𝜇𝑉 ∗ 𝑐𝑑 = 0,5 ∗ 41,11 = 20,555 м/с 𝑉𝑆2 = 𝜇𝑉 ∗ 𝑝𝑠2 = 0,5 ∗ 34,88 = 17,44 м/с 𝑉𝑆4 = 𝜇𝑉 ∗ 𝑝𝑠4 = 0,5 ∗ 34,88 = 17,44 м/с Угловая скорость: Изм. Лист № докум. Подпись Дата 15.03.05.2020.008.007 ПЗ Лист 8 𝑉𝐴𝐵 20,555 = = 102,775 с−1 𝑙𝐴𝐵 0,2 𝑉𝐶𝐷 20,555 𝜔4 = = = 102,775 с−1 𝑙𝐶𝐷 0,2 Для остальных положений расчет ведем аналогично и полученные значения сводим в таблицу 1. 𝜔2 = Таблица 1 Параметр Положение кривошипа 0 1 2 3 4 5 6 7 8 9 10 11 Va, м/с 23,55 Vc, м/с 23,55 Vb, м/с 0 9,205 17,69 23,55 23,005 14,34 0 14,34 23,005 23,55 17,69 9,205 Vba, м/с 23,55 20,555 12,6 23,55 12,6 20,555 23,55 20,555 12,6 23,55 12,6 20,555 Vd, м/с 0 9,205 17,69 23,55 23,005 14,34 0 14,34 23,005 23,55 17,69 9,205 Vcd, м/с 23,55 20,555 12,6 23,55 12,6 20,555 23,55 20,555 12,6 23,55 12,6 20,555 Vs2, м/с 7,85 17,44 21,05 23,55 22,67 18,56 7,85 18,56 22,67 23,55 21,05 17,44 Vs4, м/с 7,85 17,44 21,05 23,55 22,67 18,56 7,85 18,56 22,67 23,55 21,05 17,44 Определяем абсолютное ускорение точки А и С кривошипа 1. Так как угловая скорость кривошипа постоянна, то полное ускорение точек А и С равно соответственно нормальному ускорению: 𝑎𝐴𝑛 = 𝑎𝐶𝑛 = 𝜔12 ∗ 𝑙𝑂𝐴 = (2 ∗ 3,14 ∗ 75)2 ∗ 0,05 = 11092,05 м/с2 Вектор 𝑎𝐴 направлен по кривошипу ОА от точки А к точке О (к центру вращения кривошипа), а вектор 𝑎𝐶 - по кривошипу ОС от точки С к точке О. Задаемся масштабом плана ускорений μa = 100 (м/с2/мм) и вычисляем длину отрезков pa и pc, изображающих в выбранном масштабе соответственно вектора ускорений 𝑎𝐴 и 𝑎𝐶 : 𝑎𝐴 𝑎𝐶 𝑝𝑎 = 𝑝𝑐 = = = 110,92 мм 𝜇𝑎 𝜇𝑐 Откладываем эти отрезки на листе 1 графической части в указанных направлениях. Составляем векторное уравнение для определения ускорения точки В группы Ассура (2-3) и ускорения точки D группы (4-5): 𝑛 𝜏 𝑎𝐵 = 𝑎𝐴 + 𝑎𝐵𝐴 + 𝑎𝐵𝐴 𝑛 𝜏 𝑎𝐷 = 𝑎𝐶 + 𝑎𝐷𝐶 + 𝑎𝐷𝐶 В данных уравнениях вектора 𝑎𝐴 и 𝑎𝐶 уже полностью известны, а величина 𝑛 𝑛 векторов 𝑎𝐵𝐴 и 𝑎𝐷𝐶 вычисляется по формулам: 𝑛 𝑎𝐵𝐴 = 𝜔22 ∗ 𝑙𝐴𝐵 = 2112,54 м/с2 𝑛 𝑎𝐷𝐶 = 𝜔22 ∗ 𝑙𝐶𝐷 = 2112,54 м/с2 𝑛 𝑛 Величина отрезка an2 и cn4, изображающего вектор 𝑎𝐵𝐴 и 𝑎𝐷𝐶 на плане ускорений будет равна: Изм. Лист № докум. Подпись Дата 15.03.05.2020.008.007 ПЗ Лист 9 𝑛 𝑎𝐵𝐴 2112,54 𝑐𝑛4 = 𝑎𝑛2 = = = 211,254 𝜇𝑎 100 Уравнения ускорений решаем графически методом построения плана ускорений. Векторы в уравнении для группы (2-3) направлены следующим образом: 𝑎𝐵 𝑛 𝜏 || OB; 𝑎𝐵𝐴 || AB (направлен от точки А к точке В), 𝑎𝐵𝐴 ┴АВ. 𝑛 К вектору 𝑎𝐴 прикладываем вектор 𝑎𝐵𝐴 (т.е. от точки а откладываем в указан𝑛 ном направлении отрезок an2, а через конец вектора 𝑎𝐵𝐴 (через точку n2) проводим 𝜏 направление вектора 𝑎𝐵𝐴 . В соответствии с левой частью уравнения через полюс p проводим направление вектора 𝑎𝐵 . Точку пересечения указанных направлений обозначим малой буквой b. Вычисляем: 𝜏 𝑎𝐵𝐴 = 𝜇𝑎 ∗ 𝑛2 𝑏 = 100 ∗ 29,28 = 2928 𝑎𝐵 = 𝜇𝑎 ∗ 𝑝𝑏 = 100 ∗ 109,877 = 10987,7 Векторы в уравнении (для группы 4-5) направлены следующим образом: 𝑎𝐷 𝑛 𝜏 || OD; 𝑎𝐷𝐶 || DC (направлен от точки C к точке D), 𝑎𝐷𝐶 ┴ DC. Решив уравнение графически, определяем отрезки n4d и pd, которые изобра𝜏 жают в принятом масштабе соответственно ускорения 𝑎𝐷𝐶 и 𝑎𝐷 . Измеряем величины этих отрезков и вычисляем: 𝜏 𝑎𝐷𝐶 = 𝜇𝑎 ∗ 𝑛4 𝑑 = 100 ∗ 29,28 = 2928 𝑎𝐷 = 𝜇𝑎 ∗ 𝑝𝑑 = 100 ∗ 109,877 = 10987,7 Зная касательные ускорения находим величину угловых ускорений шатунов: 𝜏 𝜏 𝑎𝐵𝐴 𝑎𝐷𝐶 2928 𝜀2 = = 𝜀4 = = = 14640 𝑐 −1 𝑙𝐴𝐵 𝑙𝐶𝐷 0,2 Аналогично, как и при построении планов скоростей определяем положение центров масс шатунов на плане ускорений (точку s2 на отрезке ab, точку s4 на отрезке cd). Соединив центры масс с полюсом плана ускорений (точкой p) определяем ускорение центра масс: 𝑎𝑠2 = 𝑎𝑠4 = 100 ∗ 46,0288 = 4602,88 м/с2 Изм. Лист № докум. Подпись Дата 15.03.05.2020.008.007 ПЗ Лист 10