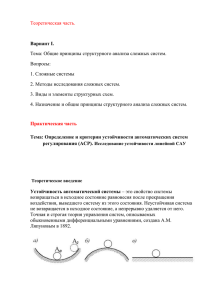
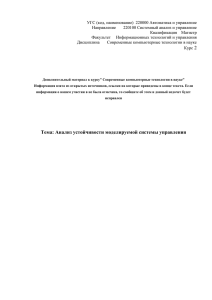
Лабораторная работа №1 Временные характеристика САУ Цель работы: Экспериментальное определение временных характеристик динамических систем и их использования для качества САУ. Рассмотрим линейную динамическую систему, движение которой описывается с помощью обыкновенных, неоднородных, линейных дифференциальных управлений в виде , (1.1) в случае одномерных систем (один вход – один выход). Если начальные условия нулевые, то движение системы можно представить на комплексной плоскости передаточной функцией (1.3) где, s – оператор Лапласа, в случае одномерных систем. Переходной функцией системы h(t), называется реакция системы на единичное ступенчатое воздействие вида , (1.8) Воздействие такого вида (функция Хевисайда) представляет собой предельный переход от непрерывной функции (1.9) приведенный на рис. 1. f(t, ) 1 0,5 t Рис1. График единичной, ступенчатой функции Импульсной переходной функцией (весовой функцией) системы к(t), называется реакция системы на единичный импульс или - функцию , (1.10) Воздействие такого вида (функция Дирака) представляет собой предельной переход от непрерывной функции (1.11) представленной на рис. 2 Рис 2. График единичного импульса. Так как функция 1[t] и представляют собой предельный переход соответствующих непрерывных функций, то существует однозначное преобразование Лапласа этих функций , (1.12) (1.13) Переходная функция системы определяется как решение неоднородного дифференциального уравнения (1.1), либо (1.2) при f(t)=1. Импульсная переходная функция определяется как решение однородного дифференциального уравнения получаемого из уравнения (1.1), либо из уравнения (1.2) При нулевых начальных условиях, используя передаточные функции (1.3), либо (1.4) изображение переходной функции получим в виде H(S)=f(s)Ф(S)= , (1.14) а изображение импульсной переходной функции k(s)=f(s)Ф(S)=Ф(S) отсюда интересующие (1.15) нас временные характеристики определяться выражениями h(t)=L-1 [ k(t)=L-1 [ , (1.16) , (1.17) будут Из выражений (1.16) и (1.17) следует, что временные характеристики определяются только параметрами системы и связаны между собой соотношением k(t)= . Импульсная (1.18) переходная движения должна удовлетворять двум условиям: k(t)=0 ,при t<0, (1.19) условию допустимой реализуемости системы и (1.20) условию устойчивости. Примем во внимание соотношение (1.18) условие (1-го) можно представить в виде Выражение (1.21) показывает, что для устойчивой системы её переходная функция стремится к некоторому установившемуся состоянию hуст =h(∞) График переходной функции называется переходным процессом, который широко используется для оценки качества системы управления. В рассмотрение вводятся следующие показатели качества системы. Время переходного процесса. Время переходного процесса характеризует быстродействие системы и определяется как время входа переходного процесса в 5 % трубку относительно h уст. (рис 3) Величина перерегулирования. Величиной перерегулирования выражением % , называется величина определяемая где -максимальная величина отклонения переходного процесса от установившегося состояния (рис 3) Величина колебательности. Величина колебательности (колебательность) переходного процесса определяется числом полных колебаний переходного процесса до его входа в 5 % трубку (рис 3) Ошибка системы в установившемся состоянии. Ошибкой системы в установившемся состоянии называется величина и характеризует статизм и астатизм системы. Если =0, то система называется астатической. Если =Const ≠ 0, то система называется статической. Выполнение работы. 1. Для передаточной функции ,определяемой номером варианта ,аналитически определить выражения для импульсной и переходной функции и построить их графики. 2. Создав в командном окне Matlab передаточную функцию с помощью команды W=tf([num],[den]), где num ,den- соответственно векторы коэффициентов числителя и знаменателя передаточной функции, командами step(W) и umpulse(W), построить графики импульсной и переходной функции. Сравнить полученные графики с графиками пункта 1.Оценить показатели качества системы. № Передаточная функция № вар. вар 1 1 2 2 3 3 4 4 5 5 Передаточная функция 12. В окне модели Simulinh создать схему модели системы, структурная схема которой представлена на рис. 8. Подавая на вход системы ступенчатое воздействие с помощью элемента Step, наблюдать график переходного процесса в окне элемента Scope и оценить показатели качества переходного процесса. g( t) (-) x(t) (-) Рис 8. Структурная схема системы № вар. 1 2 3 4 5 6 7 8 9 10 K1 10 15 10 7 10 5 10 15 20 5 K2 2 1 4 5 5 5 3 2 1 5 K3 1 1 1 2 1 1 1 1 1 1 T1 1 2 1,5 2 0,7 0,8 0,5 1,5 2 0,8 T2 1 0,5 0,4 0,2 0,7 1 1,5 0,7 0,5 0,4 T3 0,1 0,1 0,2 0,05 0,15 0,2 0,1 0,2 0,1 0,2 3. Создать в окне модели генератор импульса, возникающего в момент времени t= 0, площадь импульса должна равняться 1 единице. Блок-диаграмма генератора представлена на рис.4 .Наблюдение формы импульса производится с помощью регистратора Scope. Для того чтобы площадь импульса равнялась единице, произведение длительности импульса на амплитуду должно быть равно 1. Для этого в окне свойств элемента step установить значение поля step time равное 0, а в окне свойств элемента step1 установить значение поля step time равное желаемой длительности импульса . Амплитуда импульса устанавливается в окнах свойств step и step1 в поле Final value равная . Импульс с единичной площадью можно рассматривать как приближение к 8-функции. Если длительность импульса составляет примерно 0,03-0,05 от постоянной времени типового звена, то реакции звена на это воздействие практически совпадет с импульсной функцией. Рис 4. Модель генератора единичного импульса. . Убедимся в этом: Для этого надо получить график импульсной Функций апериодического звена с помощью команд MatLab: W =tf(l,[11]) umpulse(W) Зафиксировать полученный график. Создать блок-диаграмму ,как показано на рис.5. Рис.5. получение импульсной характеристики апериодического звена Установить параметры импульса с помощью окон свойств -длительность импульса; - амплитуда импульса; Зафиксировать реакцию апериодического звена на это воздействие. Сравнить эту реакцию с импульсной переходной функцией. Уменьшив длительность импульса в два раза, увеличить амплитуду импульса также в 2 раза. Зафиксировать реакцию линейного звена на это воздействие. Сравнить эту реакцию с импульсной функцией ,убедится что они почти совпадаютЕще раз уменьшить длительность импульса в два раза, увеличив амплитуду в 2 раза. Получить реакцию линейного звена на это воздействие. Убедится, что она почти не отличается от импульсной функции. 4. Выполнить все предыдущие пункты для колебательного звена с передаточной функцией 5. Исследовать влияние постоянной времени апериодического импульсную функцию. Для этого надо собрать блок-диаграмму как показано на,рис.6. звена на Запустив процесс моделирования , наблюдать импульсные функции апериодических звеньев с различными постоянными времени. Сделать выводы о влиянии постоянной времени Т на импульсную функцию . 6. Заменить в окне модели апериодические звенья на колебательные с передаточным функциями , Для каждого звена определить постоянную времени Т и колебательность. Запустив процесс моделирования, наблюдать импульсные функции колебательных звеньев с различными значениями коэффициента колебательности . Зафиксировать результат наблюдений. 7. В окне модели заменить передаточные функции колебательных звеньев на следующие передаточные функции 1 _____ . ________ 1 _________ . _________ 1 _________ . S 2 + S + 1 ' 4 S + 2 S + 1 ' 9 S + 3 S + 1 ' Рассчитать постоянные времени и коэффициенты колебательности для этих звеньев. Запустив процесс моделирования , наблюдать импульсные функции колебательных звеньев с одинаковыми значениями и различными постоянными времени. Зафиксировать результаты моделирования и сделать выводы характеристику. о влияние постоянной времени на импульсную 8. Исследовать переходные характеристики апериодических звеньев с различными постоянными времени . Собрать блок диаграмму как показано на рис. 7. Рис 7.Исследование переходной характеристики Запустив процесс апериодических моделирования звеньев. Сделать наблюдать переходные заключение о функции влиянии на переходную функцию постоянной времени апериодического звена. 9. ______________________________________ Повторить предыдущий пункт для колебательных звеньев с одинаковыми постоянными времени и различными коэффициентами затухания , Сделать выводы о влиянии коэффициента на переходную функцию. 10.Повторить предыдущий пункт для колебательных звеньев с различными постоянными времени и одинаковыми постоянными коэффициентами колебательности. , 11.Для последних трех звеньев с помощью команды MatLab: bode получить частотные характеристики 3-х колебательных звеньев. Сопоставить эти характеристики с переходными функциями, убедиться, что чем больше полоса пропускания, тем быстрее заканчивается переходной процесс. 1.4 Контрольные вопросы 1. Что называется переходной функцией системы? 2. Что называется импульсами … функции системы? 3. Какая система называется устойчивой? 4. Какая система является …? 5. Как определяется время переходного процесса? 6. Как определяются величины …? 7. Как определяется……….. система? 8. Как определить статизм или астатизм систем? 9.Какой вид имеют временные характеристики инерциального звена? 10. Какой вид имеют временные характеристики астатического звена? 11. Какой вид имеют временные характеристики колебательного звена? Лабораторная № 2 Частотные характеристики САУ. Цель работы: Экспериментальное и аналитическое построение частотных характеристик линейных САУ. 1.1 Основные сведения о частотных характеристиках САУ. В настоящее время в теории автоматического управления частотные методы являются основой для решения широкого круга задач, связанных с проектированием систем автоматического управления, эти методы базируются на представлении системы или отдельных её составляющих экспериментным путем, либо с помощью аналитических методов. Известно, что если на вход динамической системы, движение которой описывается линейным дифференциальным уравнением вида d n (t ) d n1 (t ) d m f (t ) d m1 f (t ) a0 a1 ... an (t ) b0 b1 ... bm f (t ) dt n dt n1 dt m dt m1 , (2.1) подать на вход гармоническое воздействие f (t ) f 0 cos t , то в установившемся состоянии на выходе системы получим сигнал так же в виде гармонической функции той же частоты, но другой амплитуды и фазы x(t ) f 0 A( )cos[t ( )] , (2.2) где A( ) и ( ) - составляющие амплитудно-фазовой функции системы Ф( j ) A( )e j ( w) . (2.3) Из совместного рассмотрения выражений (2.2) и (2.3) следует, что линейная динамическая система представляет собой линейный фильтр, частотные свойства, характеристика которого целиком и полностью определяются амплитудно-фазовой функцией Ф( j ) . Для того чтобы представить систему ее частотными характеристиками, с помощью функции Ф( j ) , необходимо осуществить замену оператора S в передаточной функции системы Ф( s) на перемунную j , b ( j )m b1 ( j )m1 ... bm Ф( j ) 0 P( ) jQ( ) a0 ( j )n a1 ( j )n1 ... an (2.4) Тогда любую систему можно представить следующими частотными характеристиками: 1. Амплитудно-фазовой характеристикой (АФХ)- графиком функции Ф( j ) , построенным в координатах [ P( ) , jQ( ) ], либо[ A( ) , ( ) ]; 2. Амплитудно-частотной характеристикой (АЧХ)графиком функции A( ) ; 3. Фазовой - частотной характеристикой (ФЧХ)- графиком функции ( ) ; 4. Вещественно- частотной характеристикой (ВЧХ)- графиком функции P( ) ; 5. Мнимой - частотной характеристикой (МЧХ)- графиком функции Q( ) ; 6. Логарифмической амплитудной характеристикой (ЛАХ)- графиком функции на плоскости [20lg A();lg()] ; 7. Логарифмической фазовой характеристикой (ЛФХ)- графиком функции на плоскости [ ( ) , lg( ) ] ; 8. Логарифмической амплитудно-фазовой характеристикой (ЛАФХ)графиком функции в координатах [20lg A( ); ( )] . В теории автоматического управления наиболее часто используются такие характеристики как АФХ, ЛАХ и ЛФХ, ЛАФХ для представления систем в разомкнутом состоянии и АЧХ, ВЧХ для представления систем в замкнутом состоянии, определяемые соотношением: Ф( j ) kw( j ) 1 kw( j ) kw( j ) u ( ) jv( ) H ( )e j( ) (2.5) (2.6) Величина модуля H i ( ) выражается в децибелах; частотный диапазон с изменением частоты в 10 раз называется декадой. Аналитическое построение частотных характеристик САУ. Для построения АФХ системы в разомкнутом состоянии, представленной передаточной функции: n kw( s) kwi ( s) i 1 (2.7) где kwi ( s ) - передаточные функции типовых звеньев. необходимо построить АФХ типовых звеньев составляющих данную систему и для определенной частоты … взятой из частотного диапазона( (0 ) ), значение модулей H i ( ) перемножить, а фазы Q( ) сложить. Для построения логарифмической амплитудной характеристики типовых звеньев, составляющих систему и значение модулей типовых звеньев, выраженных в децибелах сложить. Точно также строиться и логарифмическая фазовая характеристика. Построение частотных характеристик АЧХ и ВЧХ системы в замкнутом состоянии осуществляется с использованием выражений (2.5) и (2.6) и представлением частотных характеристик системы в разомкнутом состоянии либо на плоскости ЛАФХ [ H ( ); ( )] по формулам: A( ) u 2 ( ) v 2 ( ) H ( ) 1 2u( ) u 2 ( ) v 2 ( ) 1 2 H ( )cos ( ) H 2 ( ) u ( ) u 2 ( ) v 2 ( ) H ( )cos ( ) H 2 ( ) P( ) 1 2u ( ) u 2 ( ) v 2 ( ) 1 2 H ( )cos ( ) H 2 ( ) (2.8) (2.9) Экспериментальное определение амплитудно-фазовых частотных характеристик САУ. В основу экспериментального определения АФХ системы как в разомкнутом так и в замкнутом состояния положено выражение (2.2) из которого следует, что модуль x ( ) A( ) m f0 (2.10) где xm ( ) - максимальная амплитуда выходного гармонического сигнала, 0 заданная амплитуда входного гармонического сигнала, а фаза Ф( j ) представляет собой максимальный фазовый сдвиг между входным и выходным гармоническими сигналами. Процедура экспериментального снятия АЧХ системы представлена на рис.2.1 f Рис. 2.1. Схема определения частотной характеристики САУ: 1-генератор гармонических сигналов, f (t ) f 0 cos t ; 2-реальная система с передаточной функцией Ф( s) ; 3-регистратор типовых значений амплитуды xm и f 0 ; 4- фазометр для определения фазового сдвига ( ) . Далее, по экспериментально снятым A( ) и ( ) , можно определить частотные характеристики P( ) и Q( ) использую соотношения: P( ) A( )cos ( ) (2.11) Q( ) A( )sin ( ) (2.12) 1.3 Порядок выполнения работы. 1. Снять зависимости АЧХ и ФЧХ апериодического звена с передаточной 1 W ( s) TS 1 от частоты . Для этого построить блокфункцией диаграмму модели, как показано на рис. 2.2. Рис.2.2. Схема модели 2. Изменяя значение частоты генератора Sine Wave от 0,1 до 10 рад/сек с помощью регистратора Scope снять не менее 20 точек АЧХ. При этом надо иметь в виду, что, если амплитуда входного сигнала (элемента Sine Wave) равно 1, то значение АЧХ можно получить, измерив амплитуду сигнала на выходе исследуемого звена в установившемся состоянии. Значение ФЧХ можно получить, используя показания фазометра. Блокдиаграмма модели фазометра совместно с окнами установки параметров элементов Relay и Combinational Logic приведены на рис.2.3. Параметры остальных элементов видны непосредственно на блок-диаграмме модели. Рис.2.3. Блок-диаграмма модели фазометра 3. Используя соотношение между ЛАХ и АЧХ H ( ) 20lg A() построить по полученной таблице значений A( ) и ( ) логарифмическую амплитудную характеристику и логарифмическую фазовую характеристику. При этом ось частот откладывать в логарифмическом масштабе. ( 1 декада50мм). 4. Учитывая, что вещественная частотная характеристика P( ) может быть определена, как P( ) A( )cos ( ) , а мнимая составляющая АФХ Q( ) A( )sin ( ) , по полученной таблице значений A( ) и ( ) , получить значения P( ) и Q( ) построить на комплексной плоскости АФХ апериодического звена. 5. Сравнить полученные графики с графиками ЛАХ и ФЧХ полученными с помощью команды bode(W), где W- передаточная функция, которая должна предварительно задаваться командой W tf (num, den) ; num -числитель передаточной функции, а den - знаменатель должны быть заключены в квадратные скобки. 6. Сравнить построенную АФХ с АФХ полученной с помощью команды nyquist(w), где аргумент w такой же, как в и для команды bode(…). 7. Построить логарифмическую амплитудно-фазовую частотную характеристики ЛАФЧХ, используя полученные данные. 8. Выполнить все предыдущие пункты для колебательного звена с 1 1 W ( s) 2 W ( s) 2 S S 1 и S 0.5S 1 . передаточной функцией 1.4 Контрольные вопросы 1. На чем основано построение частотных характеристик САУ? 2. Какой вид имеют все частотные характеристики типовых звеньев САУ? 3. Какое влияние постоянная времени на вид частотных характеристик апериодического звена, дифференциального звена первого порядка, .? 4. Какое влияние оказывает … на вид частотных характеристик колебательного звена? 5. Как построить АФХ разомкнутой системы? (показать на примере) 6. Как построить ЛАХ разомкнутой системы? (показать на примере) 7. Чем отличается асимптотическая ЛАХ от реальной ЛАХ? 8. Как построить АЧХ И ВЧХ замкнутой системы по АФХ и ЛАФХ разомкнутой системы? 9. Какая существует связь 10. Какое значение имеет вещественная частотная характеристика замкнутой системы не частоте среза? 11. Какая существует связь величина 12. Какая существует связь Лабораторная работа №3 Устойчивость линейных непрерывных САУ Цель работы: знакомство с методами анализа устойчивости линейных непрерывных динамических систем и оценки влияния параметров системы на характеристики устойчивости. 3.1. Основные сведения об устойчивости САУ Под устойчивостью линейной системы понимается ее способность возвращаться в состояние равновесия, из которого она была выведена некоторым воздействием после его снятия. То есть линейная система является устойчивой, если ее свободное движение, при не равных нулю начальных условиях, носит затухающий характер. Рассмотрим систему, представленную структурной схемой (рис 3.1) g(t) KW(s) x(t) (-) Рис.3.1. Структурная схема замкнутой системы Представим передаточную функцию разомкнутой системы в виде N ( s) , тогда передаточная функция замкнутой системы будет иметь вид P( s) KW ( s) N (s) F ( s ) P( s ) N ( s ) . В этом случае полином Ô ( s) 1 KW ( s) P( s) N ( s) представляет собой характеристический полином замкнутой системы, а P( s) KW ( s) характеристический полином разомкнутой системы. В этом случае, для экспериментального определения устойчивости системы достаточно исследовать свободный (переходный) процесс при действии любых начальных условий, отличных от нуля. На рис. 3.2 - 3.5 показан характер свободного движения системы x(t) в зависимости от расположения корней характеристического уравнения замкнутой системы F ( s ) =0. На рис. 3.2б показан свободный переходный процесс x(t) устойчивости САУ, когда все корни характеристического уравнения замкнутой системы F ( s ) =0 расположены в левой полуплоскости плоскости коней S (рис 3.2а). а) б) Рис. 3.2 Расположение корней на комплексной плоскости (а) и соответствующий свободный переходный процесс (б) устойчивой системы На рис. 3.3б показан свободный переходный процесс x(t) апериодически неустойчивой (нейтральной) системы, когда наряду с левыми корнями в уравнении F ( s ) =0 есть один нулевой корень (рис 3.3а). Рис. 3.3 Расположение корней на комплексной плоскости (а) и соответствующий свободный переходной процесс (б) нейтральной САУ . На рис. 3.4б показан свободный переходный процесс колебательно неустойчивой системы, когда в уравнении F ( s ) =0 наряду с левыми корнями присутствует пара мнимых корней (рис. 3.4.а). Рис. 3.4 Расположение корней на комплексной плоскости (а) и соответствующий колебательный свободный переходный процесс колебательно неустойчивой системы Графики, представленные на рис. 3.5 иллюстрируют неустойчивую систему с парой комплексно-сопряженных правых корней характеристического уравнения замкнутой системы F ( s ) =0. Рис. 3.5 Расположение корней на комплексной плоскости (а) и соответствующий расходящийся свободный процесс (б) неустойчивой САУ Заметим, что характер свободного процесса и, в частности, его время затухания Òñâ существенно зависит от корней характеристического уравнения замкнутой системы, расположенных наиболее близко к оси – так называемых доминирующих корней характеристического полинома F ( s ) . В теории автоматического управления для исследования устойчивости существуют алгебраические и частотные критерии, позволяющие не решая характеристического уравнения, оценить устойчивость системы при различных значениях ее параметров. Алгебраический параметр устойчивости Рауса-Гурвица Среди множества алгебраических критериев устойчивости наибольшее распространение получил критерий Рауса-Гурвица, формирующий условия устойчивости в виде системы алгебраических неравенств, составленных из коэффициентов ài , (i=0,1,…,n) характеристического уравнения замкнутой системы F ( s ) a0 S n a1 S n 1 ... an 1 S an 0 . (3.5) При этом критерий устойчивости Рауса-Гурвица формируется в следующем виде. Для того, чтобы действительные части всех корней характеристического уравнения замкнутой системы были отрицательными, необходимо и достаточно, чтобы определитель n , составленный из коэффициентов ài , (i=0,1,…,n) характеристического уравнения, и его главные диагональные миноры были неравны нулю и имели знаки, одинаковые со знаком a0 . Если a0 >0, а определитель n a1 a3 a5 a7 ... 0 a0 a2 a4 a6 ... 0 0 a1 a3 a5 ... 0 0 a0 a2 ... ... ... a4 ... 0 ... ... 0 0 0 0 ... an 0 , (3.6) то для обеспечения устойчивости замкнутой системы необходимо выполнение неравенств: 1 a1 0; 2 a1 a3 a0 a2 0,..., n 0 . (3.7) Частотный критерий устойчивости Найквиста-Михайлова В основу всех частотных критериев устойчивости положен принцип аргумента. Одним из наиболее часто используемых частотных критериев устойчивости является критерий Найквиста-Михайлова, позволяющий оценить устойчивость замкнутой системы по частотным характеристикам разомкнутой системы. Для применения критерия Найквиста-Михайлова требуется знание следующих характеристик разомкнутой системы: а) амплитудно-фазовая характеристика (АФХ), либо логарифмическая амплитудная и фазовая характеристики (ЛАХ, ЛФХ) разомкнутой системы; б) количество r правых корней характеристического уравнения P(s)=0, если разомкнутая система неустойчива; в) количество нулевых корней, или корней принадлежащих мнимой оси, характеристического уравнения P(s)=0 разомкнутой системы. При использовании АФХ разомкнутой системы критерий устойчивости Найквиста-Михайлова формулируется следующим образом. Если разомкнутая система устойчива (r=0), то замкнутая система так же будет устойчива, если АФХ разомкнутой системы не охватывает точку (-1;j0), при изменении от - до + . Если разомкнутая система неустойчивая (r 0), то замкнутая система будет устойчива, если АФХ разомкнутой системы охватит точку (-1;j0) в положительном направлении r раз при от - до + , где r-количество правых корней характеристического уравнения разомкнутой системы. В случае, когда корней характеристического уравнения P(s)=0 разомкнутой системы нулевые, например у систем, передаточная функция которых содержит интегрирующих звеньев, KW ( s ) N 0 (s) , s P0 ( s ) (3.8) АФХ разомкнутой системы при =0 имеет неопределенность так, как амплитудная характеристика при 0 равна . Устранение этой неопределенности при переходе от бесконечно малых частот отрицательного знака к бесконечно малым частотам положительного знака осуществляется поворотом ветви АФХ по окружности бесконечного радиуса на угол , то есть по часовой стрелке. При практическом применении критерия Найквиста-Михайлова количество охватов АФХ точки (-1;j0) удобно определять по количеству пересечений АФХ вещественной оси на интервале ( ;-1). Обозначим П -количество пересечений сверху вниз, а П -количество пересечений снизу вверх АФХ разомкнутой системы вещественной оси на участке ( ;-1). При этом направление означает увеличение фазы, а направление - ее уменьшение. Тогда при устойчивой в разомкнутом состоянии системе (r=0), замкнутая система будет устойчива, если П -П =0 (3.9) во всем диапазоне частот от - до + . Если разомкнутая система неустойчива (r 0), то замкнутая система будет устойчива, если П -П =2 (3.10) Используя соотношения (3.9) и (3.10) можно перейти к формулировке критерия Найквиста-Михайлова по логарифмическим характеристикам. В этом случае рассматривается разность пересечений ЛФХ разомкнутой системы уровня 180o снизу вверх и сверху вниз при положительных значениях ЛАХ в диапазоне частот от 0 до . Если разомкнутая система устойчива (r=0), то замкнутая система является устойчивой при условии П -П =0 (3.11) Если разомкнутая система не устойчива (r 0), то замкнутая система будет устойчива при условии П -П = r 2 (3.12) При практическом применении критерия Найквиста-Михайлова, устойчивость замкнутой системы можно оценить по запасам устойчивости. Для этого введем в рассмотрение частоту , при которой ( ) 180o и частоту среза ñð , при которой H (ñð ) 1 или H äá (ñð ) 0 . Запас устойчивости по фазе - это величина, показывающая, на сколько можно уменьшить фазу системы на частоте среза, чтобы устойчивая прежде система оказалась на границе устойчивости: (cð ) (3.13) Запас устойчивости по амплитуде – это величина, показывающая, во сколько раз можно увеличить или уменьшить передаточный коэффициент системы при неизменных значениях всех остальных параметров, чтобы устойчивая прежде система оказалась на границе устойчивости: H 1 , или H äá H äá ( ) H ( ) (3.14) Если замкнутая система устойчивая, то она имеет запасы устойчивости и по амплитуде- H и по фазе- . На рис. 3.6-3.9 показаны различные варианты применения критерия Найквиста-Михайлова. Рис.3.6 Пример неустойчивой замкнутой системы Рис.3.7 Пример устойчивой замкнутой системы Рис.3.8 Пример устойчивой замкнутой системы Рис.3.9 Пример устойчивой замкнутой системы 3.2 Задание на выполнение лабораторной работы 1. Для замкнутой системы, заданной передаточной функцией Ф(s), экспериментально оценить ее устойчивость. 2. Для замкнутой системы, заданной передаточной функцией в разомкнутом состоянии KW ( s ) k (T2 s 1) , s (T1s 1)(T3 s 1) 2 (3.15) при значениях параметров, взятых из таблицы(3.2), оценить ее устойчивость, используя алгебраические и частотные критерии устойчивости и проверить полученные результаты экспериментально. Таблица (3.2) Номер варианта 1 2 3 4 5 6 7 8 9 10 10 10 10 10 10 10 10 10 10 10 T1 2 1.5 1.4 1.6 1.7 1.8 1.7 1.9 2.1 2.2 T2 0.4 0.4 0.3 0.45 0.5 0.3 0.5 0.45 0.5 0.35 T3 0.02 0.02 0.025 0.04 0.06 0.03 0.04 0.02 0.05 0.03 Параметр k 3.3 Порядок выполнения лабораторной работы 1. В командном окне Matlab создать передаточные функции, используя команду wi=tf([num],[den]), где num, den- соответственно векторы коэффициентов числителя и знаменателя передаточной функции. Принять T1 =1, =0.5. Ô1 ( s ) 1 ; T1 S 1 1 ; T S 2 T1 S 1 1 Ô3 ( s ) 2 2 ; T 1 S 1 1 Ô 4 (s) ; T1 S 1 Ô 2 ( s) 2 1 2 Используя команду pole( Wi ) найти корни характеристических уравнений. Командой step( Wi ) построить графики переходных процессов для W1 , W2 , W3 , W4 . Убедиться в том, что: а) наличие правых корней приводит к тому, что выходная координата с течением времени неограниченно увеличивается. б) наличие мнимой составляющей у корней характеристического уравнения приводит к тому, что переходный процесс становится колебательным. 2. Создать передаточную функцию KW ( s ) k (T2 s 1) ; s (T1s 1)(T3 s 1) 2 Значения k , T1 , T2 , T3 выбрать в соответствии с номером варианта из таблицы (3.2). 3. С помощью команды WS=feedback(W,1) получить передаточную функцию замкнутой системы. Определить (командой pole(W)) корни характеристического уравнения. Убедиться, что все они имеют отрицательные вещественные части, т.е. система в замкнутом состоянии устойчива. 4. Используя команду margin(W) построить частотные характеристики разомкнутой системы и определить запас устойчивости замкнутой системы по фазе и амплитуде. 5. Командой nyquist(W) построить годограф Найквиста-Михайлова (АФХ разомкнутой системы) и убедиться, что он не охватывает точку с координатами (-1;j ). Для более детального исследования годографа Найквиста-Михайлова можно явным образом в команде nyquist(W,[ h : : k ]) задавать диапазон частот, для которого строится кривая. Здесь h , , k - начальные значения частоты, шаг изменения и конечное значение частоты. 6. Использовать критерий Михайлова для проверки устойчивости той же системы. Для этого рассматривая условно знаменатель передаточной функции замкнутой системы (характеристический полином передаточной функции замкнутой системы) как передаточную функцию WM(s), с помощью команды WM=tf([ a0 , a1 ,..., an ],1) создать ее, а затем командой nyquist(WM) построить кривую Михайлова. Убедиться, что кривая Михайлова выходит из положительной части вещественной оси и проходит в положительном направлении 4 квадрата комплексной плоскости. 7. Командой step(WS) построить кривую переходного процесса замкнутой системы. Увеличить коэффициент передачи системы в 2 раза, определить запасы устойчивости системы с новым коэффициентом и построить кривую переходного процесса, наблюдать, как уменьшение запасов устойчивости влияет на качество переходного процесса. Дома, используя традиционные методы построения кривых Михайлова, Найквиста-Михайлова, ЛАХ, ФЧХ построить их, включить в отчет и сравнить с ранее полученными в Matlab характеристиками. 3.4 Контрольные вопросы 1. Что понимается под устойчивостью системы? 2. Какой вид имеют импульсная переходная и переходная функция устойчивой системы? Привести пример передаточной функции. 3. Какой вид имеют импульсная переходная и переходная функции нейтрально устойчивой системы (границы апериодической неустойчивости)? Привести пример передаточной функции. 4. Какой вид имеют импульсная переходная и переходная функции систем на границе колебательной неустойчивости? Привести пример передаточной функции. 5. При каком соотношении параметров система с передаточной функцией в разомкнутом состоянии KW ( s) k будет устойчива в (T1s 1)(T2 S 1) замкнутом состоянии по критерию Рауса-Гурвица? 6. Что понимается под запасом устойчивости системы по фазе? 7. Что понимается под запасом устойчивости системы по амплитуде? 8. Определить запасы устойчивости для системы из пункта 5 по АФХ, ЛАХ и ЛФХ и оценить влияние параметров k , T1 , T2 на величину этих запасов.