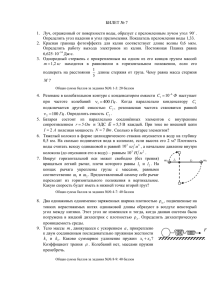
МЕХАНИЗМЫ ПРЕРЫВИСТОГО ДВИЖЕНИЯ ИХ ВИДЫ И ОСНОВНЫЕ РАСЧЕТЫ 1. МАЛЬТИЙСКИЙ МЕХАНИЗМ При конструировании различных машин, например, манипуляторов, автоматических линий и т. п., часто возникает необходимость в механизмах, обеспечивающих прерывистое движение рабочих органов машины. Одним из таких, наиболее распространенных в технике, является мальтийский механизм. В этом механизме выходное звено имеет периоды движения и покоя при непрерывном движении входного звена. Кривошип выполняется в виде диска-фиксатора А (в дальнейшем – фиксатор), на котором закреплен рычаг Ввс виде роликом С, называемый цевкой Мальтийский крест выполняется диска с радиальными (рисунок На фиксаторе, вырезами симметрично оси которым его вращения, возможно пазами Е1а). и сегментными F, по скользит диск Мальтийские механизмы представляют собойγ между трехзвенные размещение цевок, располагаемых под мальтийского углом ними, а фиксатора несколько А, обеспечивая неподвижность креста. угол между первой цевками β (рисунок На фиксаторе механизмы, состоящие из стойки 0, входного (кривошипа) 1 Число пазовпоследней на крестеиможет варьироваться от 3звена до1b). 12, и они всегда также имеются сегментные вырезы D,2. обеспечивающие работу и выходного звена (мальтийского креста) располагаются симметрично. мальтийского механизма без заклинивания. Мальтийские механизмы с двумя и более цевками применяются в случае необходимости получения разных периодов движения и покоя мальтийского креста, при этом угол между цевками γ должен быть больше угла φ. Для таких механизмов значения углов γ задаются в исходных данных. Для успешной работы мальтийского механизма Исходными данными необходимо, чтобы для синтеза кривошип О1А, при его мальтийского обычно заходе в паз, была являются: межосевое перпендикулярен оси этого паза О2А, то2 есть расстояние О1О = а, угол АО2 должен быть числоО1пазов прямым. мальтийского креста Угол α между осями z, количество цевок соседних пазов n определяется по ц и угол γ между ними формуле 360 z Из треугольника О1АО2 следует, что угол поворота кривошипа φ, соответствующий углу поворота мальтийского креста α φ = 180º – α. Этот угол не может превосходить угол между цевками γ. При равенстве числа пазов и цевок на фиксаторе, (если цевки размещены симметрично), φ = γ. В противном случае φ < γ, и максимальное количество цевок, которое может быть размещено на кривошипе max ц ≤ n (360º – φ)/γ Коэффициентом движения мальтийского креста называется отношение 1 t 30( z 2) n1 0,5 ( z 2) 1 д Кд Т z n1 60 z диаграмма движения мальтийского креста а) диск-фиксатор имеет только одну цевку. Величина t д1 обратно пропорциональна количеству пазов на кресте, она будет максимальна при z = 3; б) диск-фиксатор имеет три цевки, расположенные не симметрично. Здесь φ = γ, поэтому вначале, при прохождении трех цевок, крест не имеет периодов покоя, но после прохождения последней, третьей цевки, он покоится, пока кривошип делает поворот на угол β, в) диск-фиксатор также имеет три цевки, но здесь γ > φ. В этом случае, при последовательном проходе трех цевок, после каждого прохода появляются периоды покоя креста, в течение которых кривошип поворачивается на угол γ-φ, а потом крест покоится при прохождении кривошипом угла β ДЕМОНСТРАЦИЯ ВИДЕО 2. ХРАПОВЫЙ МЕХАНИЗМ Храповые механизмы применяют для осуществления движений подачи инструмента и обрабатываемого материала в различных станках. Кроме того, их используют в качестве тормозных устройств, препятствующих обратному ходу. Так, храповой механизм в грузоподъемных лебедках предотвращает падение поднятого груза. Храповой механизм — устройство, допускающее вращение оси в одном направлении и исключающее вращение этой же оси в противоположном направлении. Основой храпового механизма служит храповая пара (рис. а), состоящая из звена 1, называемого храповиком, и звена 2, называемого собачкой или щеколдой. Замыкая оба звена пружиной 3, получаем храповой механизм. Храповые механизмы делятся на два основных класса: 1. Механизмы, в которых храповик задерживается собачкой только в одном направлении, а в другом направлении может двигаться и приподнимать собачку. К этому классу относятся механизмы, имеющие храповики с острыми зубьями 2. Механизмы, в которых храповик затормаживается в двух направлениях. К этому классу относятся механизмы, имеющие храповики с симметричными зубьями. Действие такого храповика соответствует работе двух противоположно действующих храповых механизмов. Пружины храпового механизма создают момент, прижимающий собачку к храповому колесу. Однако этот момент не предназначен для преодоления сил и моментов, которые могут действовать на собачку от храпового колеса. Усилие пружины оказывается для этой цели недостаточным. Оно лишь вводит собачку в зацепление с храповым колесом. ДЕМОНСТРАЦИЯ ВИДЕО