Лекция №18 СМА 2015x
реклама

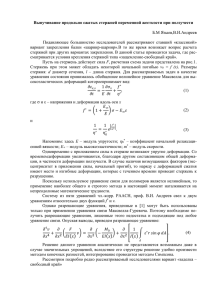
Лекция №18 Энергетические методы определения перемещений упругой стержневой системы 18.1 Потенциальная энергия деформации при центральном растяжении – сжатии. 18.2 Потенциальная энергия при объемном напряженном состоянии. 18.3 Потенциальная энергия деформации при кручении. 18.4 Потенциальная энергия деформации при изгибе. 18.5 Потенциальная энергия деформации в общем случае нагружения стержня. 18.6 Теорема Кастилиано. 18.7 Обобщенная сила и обобщенное перемещение. Перемещение от единичной силы. 18.1 Потенциальная энергия деформации при центральном растяжении – сжатии. При статическом нагружении упругого тела внешние силы совершают работу А , которая согласно закону сохранения энергии, не исчезает, а трансформируется в потенциальную энергию деформации U . Рассмотрим стержень, который растягивается в пределах упругих деформаций на величину l (рис.18.1,а). Графическая зависимость между силой F и деформацией l представлена на рис.18.1,б прямой линией. Рис.18.1 К определению потенциальной энергии деформации В процессе нагружения сила возрастает от нуля до конечного значения F . Элементарная работа текущей силы F на элементарном перемещении d( l ) равна d (A) F d(l ) , а работа на перемещении l определится по формуле l A U F d (l ) , или численно равна площади треугольника ОАС (рис.18.1,б) 0 1 F l F l . По закону Гука l . Тогда выражение для потенциальной 2 EA энергии примет вид F 2 l (18.1) U 2 E A Формулу (18.1) можно использовать только в том случае, когда продольная сила и площадь поперечного сечения стержня постоянны. Если продольная сила или площадь поперечного сечения изменяются по длине стержня, то потенциальная энергия определяется суммированием значений N 2 dx потенциальной энергии, накапливаемой на элементарном участке dU , т.е. 2 E A l N 2 dx U (18.2) 2 EA 0 A U Потенциальная энергия всегда положительная и при ее вычислении нельзя пользоваться принципом независимости действия сил, так как между U и N нет линейной зависимости. Для оценки энергоемкости материала определяют удельную потенциальную U энергию, накапливаемую в единице объема u , где V A l - объем стержня. V 2 2 F l F 1 1 ( )2 Тогда u , или 2 E A Al A 2E 2E 2 E 2 u 2 (18.3) 18.2 Потенциальная энергия при объемном напряженном состоянии Найдем удельную потенциальную энергию, накопленную вследствие упругих деформаций единицей объема материала при объемном напряженном состоянии. Для этого рассмотрим кубик со стороной равной единице, находящийся под действием главных напряжений 1 , 2 , 3 (рис. 18.2). Рис. 18.2 Объемное напряженное состояние Обобщая формулу (18.3) на случай одновременного действия трех напряжений, получим 1 u ( 1 1 2 2 3 3 ) (18.4) 2 Подставив в (18.4) выражения относительных удлинений по закону Гука 1 (1 ( 2 3 )) ( 2 (1 3 )) ( 3 (1 2 )) ,2 , 3 , E E E Получим u 1 [ 12 2 2 32 2 ( 1 2 1 3 2 3 )] . 2E (18.5) 18.3 Потенциальная энергия деформации при кручении Внешние силы, создающие упругую деформацию стержня, совершают работу, которая накапливается в объеме материала стержня в виде потенциальной энергии деформации. Выделим элемент вала длиной dx , получивший угол закручивания d от момента M x (рис.18.3,а). Момент упруго возрастает пропорционально углу d M d (рис.18.3,б). Работа момента равна площади графика, dA x . Энергия, 2 M dx накапливаемая в элементе стержня dU dA . По закону Гука d x . G Jx Рис.18.3 К определению потенциальной энергии деформации M x 2 dx Тогда потенциальная энергия деформации элемента вала равна dU . После 2G J x интегрирования по длине стержня, получим l M 2 dx U x (18.6) 2G J x 0 18.4 Потенциальная энергия деформации при изгибе. Составим выражение для энергии деформации однородной линейно-упругой балки при плоском поперечном изгибе (рис.18.4) Рис. 18.4 Энергия деформации элемента балки равна сумме энергий деформаций изгиба (а) и сдвига (б). Каждый элемент балки длиной dx деформируется от двух факторов: от изгибающего момента элемент искривляется на угол d z и от поперечной силы Q y возникает деформация сдвига со средним углом сдвига ср . Энергию деформации получим как сумму энергий искривления и сдвига l l 0 0 U U Mz U Qy dU Mz dU Qy , где - U Mz и U Qy соответствующие части энергии, накапливаемой в элементе балки dx . Энергия сдвига равна: l k Qy2 U Qy dx , 2G A 0 где S отс k A ( z ) 2 dA . Jz b A (18.7) (18.8) k учитывает неравномерность распределения напряжений xy по сечению балки. Значение k зависит от формы сечения. Так, например, для 6 А прямоугольника k 1, 2 , для двутавра при изгибе в плоскости его стенки k , 5 Аст где А -площадь всего сечения двутавра; Аст - площадь стенки. Коэффициент l M z d z M z2 dx M 2 dx Энергия изгиба: dU Mz и, следовательно, U Mz z . 2 E Jz 2 2 E Jz 0 Окончательно выражение потенциальной энергии при плоском изгибе примет вид l l k Qy2 M z2 dx U U Mz U Qy dx (18.9) 2 E J z 0 2 G A 0 18.5 Потенциальная энергия деформации в общем случае нагружения стержня. Согласно принципу суперпозиции потенциальная энергия деформации U в общем случае нагружения будет равна сумме потенциальных энергий растяжения, сдвига, изгиба и кручения: l l l l l k y Qy2 M y2 dx l M x2 dx k z Qz2 M z2 dx N2 , U dx dx dx (18.10) 2 EA 2GA 2GA 2 EJ z 2 EJ y 0 2GJ x 0 0 0 0 0 где k y , k z - коэффициенты формы, зависящие от вида сечения (табличные данные) и учитывающие неравномерный характер распределения касательных напряжений по сечению. 18.6 Теорема Кастилиано Рассмотрим метод определения перемещений, основанный на вычислении потенциальной энергии деформации и предложенный Кастелиано. Условимся под перемещением в заданном направлении понимать проекцию полного перемещения на заданное направление. Поэтому перемещение точки приложения силы по направлению этой силы надо понимать как проекцию на направление силы полного перемещения этой точки. Рассмотрим балку, нагруженную системой сосредоточенных сил P1 , P2, , Pn (рис.18.5,а). Под действием этих сил балка прогнется по кривой I и останется в равновесии (рис.18.5,а) Рис. 18.5 Необходимо определить перемещение yn . Для этого переведем балку из состояния I в состояние II путем добавления к балке бесконечно малой добавки dPn . Изменение работы при переходе из состояния I в состояние II равно изменению потенциальной энергии (18.11) A II AI dU Так как при переходе от состояния I к состоянию II приращение получила только сила Pn , то U dU dPn (18.12) Pn Работа сил в первом состоянии 1 1 1 AI P1 y 1 P2 y 2 Pn y n . (18.13) 2 2 2 Изменим порядок приложения сил. Для определения работы во II-ом состоянии сначала к упругому телу приложим силу dPn , при этом балка немного прогнется (под силой на величину dyn ) и займет положение III (рис.18.5,б). После этого нагрузим балку статически приложенными силами P1 , P2, , Pn . При этом к первоначальным прогибам dy1 , dy2, , dyn добавятся прогибы y1 , y2, , yn . Тогда (18.14) 1 1 1 1 dPn dyn P1 y 1 P2 y 2 Pn y n dPn yn 2 2 2 2 Здесь сила dPn сначала совершает собственную работу на перемещении dy n , а затем AII дополнительную работу на перемещениях y n , вызванным другими силами (нет коэффициента 1/2). Подставляем (18.12), (18.13), (18.14) в выражение (18.11), получаем: 1 U 1 dPn dPn dyn dPn yn .Слагаемое dPn dyn отбросим, как величину второго 2 Pn 2 U dPn . Сокращая на dPn , порядка малости, в результате получим dPn yn Pn окончательно получим U yn . (18.15) Pn Таким образом, в рассмотренном случае частная производная от потенциальной энергии деформации по силе равна перемещению точки приложения силы в ее направлении. Полученный результат можно обобщить. Пусть на балку действуют в разных сечениях пары сил M 1 , M 2, , M n . Все предыдущие рассуждения можно повторить и при вычислении работы моментов следует умножать M 1 не на прогиб y1 , а на угол поворота 1 , тех сечений, где эти пары приложены. Тогда формула (18.15) примет вид U n (18.15) M n Полученные результаты можно обобщить в теореме Кастилиано. Перемещение точки приложения обобщенной силы по направлению её действия равно частной производной от потенциальной энергии деформации по этой силе: U P , (18.16) P где P - полное перемещение (линейное перемещение или угол поворота ) от обобщенной силы; P - обобщенная сила (собственно сила или момент пары сил) 18.7 Обобщенная сила и обобщенное перемещение. Перемещение от единичной силы. Обозначим P - любой силовой фактор (сосредоточенную силу, пару сил, распределенную нагрузку) и назовем его обобщенная сила; - перемещение, на котором совершает работу обобщенная сила, назовем его обобщенное перемещение. Каждой силе соответствует свое обобщенное перемещение. Рис. 18.6 Обобщенные перемещения от различных нагрузок Сосредоточенная сила P совершает работу на линейном перемещении (рис.18.6,а). Работа внешней сосредоточенной силы A P имеет размерность [ н м ]. Пара сил P M совершает работу на угловом перемещении (рис.18.6,б). Тогда работа пары сил A P M также имеет размерность [ н м ]. Для распределенной нагрузки P q обобщенным перемещением является площадь , ограниченная упругой осью балки до и после деформации (рис.18.6,а). Работа, совершенная распределенной нагрузкой A P q имеет размерность [ н м ]. Введем понятие перемещения от единичной силы. При упругой деформации, когда справедлив закон Гука, перемещение пропорционально приложенной нагрузке. Это перемещение можно записать как произведение силы на перемещение от единичной силы P , где перемещение от силы P 1 ( -коэффициент податливости). Например, при растяжении стержня силой P (рис.18.7,а) Pl 1 l 1 l P P , где , EA EA EA при изгибе балки, нагруженной на конце силой P (рис.18.7,б). P l3 1 l 3 1 l 3 P P ,где , 3E J 3E J 3E J при кручении стержня крутящим моментом M x (рис.18.7,в). 1 l M xl 1 l . x Mx M x , где G Jx G Jx G Jx Рис. 18.7 К определению перемещений от единичной силы Получим практическую формулу для вычисления перемещений. При изгибе в плоскости xoy (рис.18.7,б) после дифференцирования под интегралом имеем U U 2 dx P P 0 2 E J z 20 l M z2 l Окончательно: U P 0 l M z M z l Mz P dx P dx . E J z 0 E J z Mz M z P dx . E J z Mz (18.17) Для балки, нагруженной на конце силой P (рис.18.8,б) определим линейное и угловое l перемещение имеем: M z P x , M z 3 l l P dx ( P x ( x)) dx P x 2 dx P l . E J E J z E J z 0 3E J z z 0 M z x , P Mz 0 Аналогично при растяжении (рис.18.7,а) N l N U P dx . P 0 E A Перемещение конца стержня: (18.18) N P, N 1, P N l l P 1 P P l P dx dx dx . EA EJ z EA0 EA 0 0 Аналогично при кручении l N M x l Mx U P dx . P 0 G J x (18.19) Угол закручивания стержня: Mx M , M x M x 1 P M M x l l P dx M 1 dx M dx M l . 0 G J x G Jx G J x 0 G Jx 0 Таким образом, перемещения, вычисленные с помощью теоремы Кастилиано, совпадают с результатами, полученными на основе интегрирования дифференциальных уравнений: растяжения-сжатия, кручения, изгиба стержня. Способ, предложенный Кастилиано, позволяет определять перемещения не на всей оси стержня, а только в отдельных его точках, но с меньшими вычислительными затратами. l Mx