На правах рукописи ФИНИЧЕНКО Василий Николаевич Специальность 05.22.07
реклама

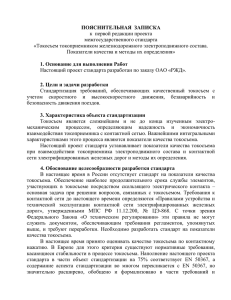
На правах рукописи ФИНИЧЕНКО Василий Николаевич СОВЕРШЕНСТВОВАНИЕ ТОКОПРИЕМНИКОВ ДЛЯ СКОРОСТНЫХ И ТЯЖЕЛОВЕСНЫХ ПОЕЗДОВ Специальность 05.22.07 «Подвижной состав железных дорог, тяга поездов и электрификация» АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук ОМСК 2008 Работа выполнена в государственном образовательном учреждении высшего профессионального образования «Омский государственный университет путей сообщения (ОмГУПС (ОмИИТ))». Научный руководитель: заслуженный деятель науки и техники РФ, доктор технических наук, профессор ГАЛИЕВ Ильхам Исламович. Официальные оппоненты: доктор технических наук, профессор МАСЛОВ Геннадий Петрович; кандидат технических наук, доцент БЕЛЯЕВ Павел Владимирович. Ведущая организация: Открытое акционерное общество «Всероссийский научно-исследовательский институт железнодорожного транспорта» (ОАО «ВНИИЖТ»). Защита диссертации состоится 30 декабря 2008 г. в 9 часов на заседании диссертационного совета Д 218.007.01 при государственном образовательном учреждении высшего профессионального образования «Омский государственный университет путей сообщения» по адресу: 644046, г. Омск, пр. Маркса, 35, ауд. 219. С диссертацией можно ознакомиться в библиотеке ОмГУПСа. Автореферат разослан 29 ноября 2008 г. Отзывы на автореферат в двух экземплярах, заверенные гербовой печатью учреждения, просим направлять в адрес диссертационного совета Д 218.007.01. Ученый секретарь диссертационного совета доктор технических наук, профессор О. А. Сидоров. ____________________________ © Омский гос. университет путей сообщения, 2008 2 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность проблемы. Важнейшую роль в техническом перевооружении железнодорожного транспорта играет электрификация железных дорог, позволяющая повысить скорость движения поездов, а следовательно, сократить время доставки грузов и пассажиров. Транспортная стратегия России, принятая 03.12.2003 на всероссийском совещании в Кремле, наметила направления развития транспортной системы страны, в том числе создание международных транспортных коридоров «Европа – Азия» и «Север – Юг», в которых основную роль будут играть электрические железные дороги. Согласно стратегическим направлениям научно-технического развития ОАО «Российские железные дороги» на период до 2015 г. («Белая книга» ОАО «РЖД») одним из важнейших направлений является создание подвижного состава и инфраструктуры для высокоскоростного движения. Спецификой электрического транспорта является подвод энергии через скользящий контакт между токоприемником и контактной подвеской, поэтому с повышением скоростей движения увеличивается мощность подвижного состава, а число токоприемников уменьшается до двух, при этом значение снимаемых полозом токов возрастает (особенно при постоянном токе), что требует совершенствования существующих элементов и узлов токоприемников. Это оставляет проблему обеспечения надежного и экономичного токосъема особенно актуальной. Цель диссертационной работы – совершенствование конструкции токоприемников электроподвижного состава при эксплуатации поездов с повышенной массой и при высоких скоростях движения. Для достижения указанной цели в диссертационной работе поставлены и решены следующие задачи: анализ существующих конструкций верхних узлов токоприемников и оценка их влияния на нагрузочную способность токоприемников; создание методики расчета взаимодействия токоприемников с контактной сетью с учетом различного исполнения верхнего узла токоприемника; разработка конструкции верхних узлов токоприемников для обеспечения качественной передачи рабочего тока до 3000 А при скоростях движения до 250 км/ч; создание методики и оборудования, обеспечивающих проведение испытаний разработанных узлов токоприемника и перспективных контактных пар, применяемых в системах токосъема магистрального электроподвижного состава; экспериментальные исследования разработанных устройств и оценка технико-экономической эффективности предлагаемых технических решений. Методы исследования. Теоретические и экспериментальные исследования проведены на основе методов системного подхода, математического моделирования на ПЭВМ с использованием универсальной математической программы MathCad. Экспериментальные исследования проводились на лабораторных установках и на действующих токоприемниках электроподвижного состава магистральных электрических железных дорог. 3 Научная новизна работы заключается в следующем: усовершенствование методики расчета взаимодействия токоприемников с контактной сетью с учетом различного исполнения верхнего узла токоприемника; разработка конструкций верхних узлов токоприемников для обеспечения качественной передачи рабочего тока до 3000 А при скоростях движения до 250 км/ч; создание методики и оборудования, обеспечивающих проведение испытаний предложенных узлов токоприемника и перспективных контактных пар, применяемых в системах токосъема магистрального электроподвижного состава. Достоверность научных положений и результатов диссертационной работы обоснована теоретически и подтверждена результатами лабораторных и натурных экспериментов, проведенных на действующих электрифицированных участках Октябрьской железной дороги. Расхождение результатов теоретических исследований с экспериментальными данными составляет не более 6,5 %. На предлагаемые схемные решения верхнего узла токоприемника и стенда для комплексного исследования контактных элементов получены три патента на полезные модели. Практическая ценность диссертации заключается в следующем: 1. Усовершенствованная методика расчета взаимодействия токоприемников с контактной сетью с учетом различного исполнения верхнего узла токоприемника позволяет определить параметры токосъемных устройств для обеспечения надежного и качественного токосъема. 2. Предложенные конструкции верхних узлов токоприемников обеспечивают передачу рабочего тока до 3000 А при скоростях движения электроподвижного состава до 250 км/ч. 3. Разработанные методики экспериментальной проверки параметров и характеристик верхних узлов токоприемников, а также созданный стенд для комплексного исследования контактных элементов обеспечивают проведение исследований разработанных конструкций в лабораторных условиях. Реализация результатов работы. Разработанная методика определения статических и динамических характеристик токоприемников использована при проведении испытаний скоростной системы токосъема на участке Лихославль – Калашниково Октябрьской железной дороги. Созданный для комплексного исследования контактных элементов токоприемников стенд реализован в лаборатории «Контактные сети, линии электропередачи и токосъем» ОмГУПСа и используется в учебных и научных целях. Апробация работы. Основные положения, выводы и рекомендации диссертационной работы докладывались и обсуждались на всероссийской научнотехнической конференции с международным участием «Ресурсосберегающие технологии на железнодорожном транспорте» (Иркутск, 2005), на IV международном симпозиуме «Eltrans-2007» – «Электрификация и организация скоростных и тяжеловесных коридоров на железнодорожном транспорте» (Санкт-Пе4 тербург, 2007), на международной научно-практической конференции «Актуальные проблемы Транссиба на современном этапе. Кадровое и научнотехническое обеспечение процессов интеграции в мировую транспортную систему» (Новосибирск, 2007), на V всероссийской научно-технической конференции «Политранспортные системы» (Иркутск, 2007), на научно-технических семинарах кафедры «Теоретическая механика» ОмГУПСа в 2005 – 2008 гг. Публикации. Основное содержание диссертации опубликовано в шести печатных работах, которые включают в себя четыре статьи и два тезиса докладов, получены три патента на полезные модели. Материалы диссертации вошли в отчет по научно-исследовательской работе, выполненный по заказу ОАО «Российские железные дороги». Структура и объем работы. Диссертационная работа состоит из введения, пяти разделов, заключения, библиографического списка из 151 наименования и одного приложения и содержит 150 страниц основного текста, 11 таблиц и 69 рисунков. ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во введении рассматривается состояние проблемы, обосновывается ее актуальность, формулируются задачи исследований и намечаются пути их решения. В первом разделе выполнен анализ известных скоростных токоприемников электроподвижного состава, рассмотрены конструкции верхнего узла токоприемников и названы требования, предъявляемые к верхним узлам. На основании проведенных исследований выявлены следующие пути повышения нагрузочной способности токоприемников: подрессоривание отдельных рядов контактных элементов; увеличение числа контактных элементов на полозах; улучшение электрических и динамических свойств контактных элементов токоприемников (использование материалов с низким собственным сопротивлением); улучшение условий отвода снимаемого тока с контактных элементов и каркасов полозов (снижение переходного сопротивления) и охлаждение контактных элементов. Во втором разделе рассмотрена усовершенствованная методика расчета взаимодействия токоприемников с контактной сетью с учетом различного исполнения верхнего узла токоприемника; данная методика позволяет определить параметры токосъемных устройств для обеспечения надежного и качественного токосъема. Исследования по моделированию взаимодействия «токоприемник – контактная подвеска» проводили И. И. Власов, Г. Г. Марквардт, К. Г. Марквардт, А. В. Фрайфельд, В. П. Михеев, А. В. Плакс, С. Н. Ковалев, Т. А. Тибилов, П. Д. Титаренко, А. В. Ефимов, А. Г. Галкин, В. М. Павлов, В. А. Ан, М. М. Ерофеева, В. Т. Жарков, В. И. Себелев, А. Н. Горбань, Р. Ниблер, С. Фуджии, Н. Сибата, И. Кумезава и др. 5 Расчет взаимодействия токоприемника с контактной подвеской сводится к определению характеристики контактного нажатия с учетом детерминированного воздействия со стороны контактного провода и основания токоприемника. В работе приняты следующие обозначения: жкс – жесткость контактной подвески в точке контакта; rкс – коэффициент вязкого трения в контактной подвеске; жсвязи – жесткость, имитирующая упругие связи в контактной подвеске; mкc – масса контактной подвески, сосредоточенная над одним полозом; mкэ – масса полоза токоприемника; wкэ – сила сухого трения контактного элемента; жкэ – жесткость пружины контактного элемента; жш – жесткость пружины штанги; mш – масса штанги каретки; mк – масса каретки; wк – сила сухого трения каретки; жк – жесткость пружины каретки; mр – масса системы подвижных рам токоприемника; wр – сила сухого трения в системе подвижных рам; rр – коэффициент вязкого трения в системе подвижных рам; Pр – статическое нажатие токоприемника; Pвр и Pвл – аэродинамическая сила, воздействующая на систему подвижных рам и на полоз токоприемника; Vп.с – скорость движения подвижного состава; yосн – отклонение основания токоприемника в вертикальном направлении от положения статического равновесия; yр – высотное положение рамы токоприемника; yк – высотное положение каретки; yкэ1 и yкэ2 – расстояние в вертикальном направлении от первого и от второго по ходу движения полозов до положения статического равновесия; yкс0 – высотное положение контактного провода при отсутствии под ним токоприемника; α1 и α2 – угол поворота штанги первого и второго по ходу движения полоза токоприемника. В расчетах приняты следующие допущения: рамы, штанги токоприемника и его необрессоренные части являются абсолютно твердыми, в связи с чем отсутствует необходимость учета упругих деформаций штанг и рам токоприемника, которые имеют незначительную величину и слабо влияют на процесс токосъема; контактные элементы движутся по контактному проводу безотрывно, что позволяет не рассчитывать траектории движения контактного провода и контактных элементов в отдельности, а также не учитывать ударный процесс при соприкосновении контактного элемента с контактным проводом; контактная подвеска принята упругой и представляется дискретной моделью; контактные элементы перемещаются только вертикально (незначительное перемещение в горизонтальном направлении принимается равным нулю, так как оно вызывается упругими деформациями в рамах и штангах токоприемника, которые не учитываются согласно первому допущению). Влияние на контактное нажатие со стороны стрелы провеса контактного провода заключается в изменяющихся по длине пролета жесткости контактной подвески и высотном положении контактного провода при отсутствии под ним токоприемника. Значения высотного положения контактной подвески КС-200-06 в пролете и ее жесткости получены экспериментально с использованием оборудования вагона-лаборатории для испытания контактной сети на перегоне Лихославль – Калашниково Октябрьской железной дороги. Для учета изменяющейся жесткости контактной подвески использовано ее разложение в ряд Фурье: 6 n ж кс ж кс 0 1 k cosk0 t , (1) k 1 где k – номер гармонической составляющей в жесткости контактной подвески; a k k – коэффициент параметрического возбуждения k-й гармоники; аk – амæ êñ0 плитуда косинусоидальной составляющей k-й гармоники; 0 2Vï .ñ / lï ð – частота основной составляющей неравноупругости подвески; lпр – длина пролета контактной подвески. Кроме того, на токоприемник будет воздействовать переносное движение, возникающее при изменении высотного положения полоза токоприемника из-за переменной жесткости контактной подвески. На процесс токосъема влияют также колебания основания токоприемника. Аэродинамическое воздействие в расчетах взаимодействия токоприемника и контактной подвески учитывается с помощью экспериментально полученных в ходе линейных испытаний зависимостей аэродинамической подъемной силы, действующей на токоприемник (рис. 1). Для расчета взаимодействия то120 коприемника с контактной подвеской Н использованы уравнения Лагранжа 3 80 второго рода, которые подразумевают 2 расчет кинетической и потенциальной 60 энергии, диссипативной функции и Р 40 обобщенных сил. Так как конструкция 20 токоприемника имеет шесть степеней 1 свободы, то необходимо составить 0 75 100 125 150 175 км/ч 225 шесть уравнений движения. ВведенV ные обобщенные координаты отсчиРис. 1. Аэродинамическая подъемная тываются от положения статического сила предложенного токоприемника равновесия, чтобы потенциальная энергия в этом положении была нуле(линия 1 – высота подъема токовой, т. е. имела в положении равновеприемника 5,4 м; 2 – 5,6; 3 – 5,8 м) сия минимум. В связи с тем, что подвижной состав совершает колебания, положение равновесия перемещается вместе с основанием токоприемника. Таким образом, система отсчета, в которой описывается движение токоприемника, учитывает переносное движение со скоростью y осн в каждый момент времени. Дифференциальное уравнение движения рамы токоприемника имеет вид: mð yp yî ñí f ñò.êñ æ ê y p yê lê 0 rp y p yî ñí f ñò.êñ (2) Sp rê yê yð f ñò.êñ Ðð Ðy ; S уравнение движения каретки токоприемника – у 7 m ê yê yî ñí f ñò.êñ m ø 2y ê 2 y î ñí f ñò.êñ 0,5lø 1 2 æ ê yê y ð lê 0 æ êý 2 lêý0 y ê y êý1 y êý2 l 2 sin 1 sin 2 (3) Sê ; S дифференциальные уравнения движения первого и второго по ходу движения подвижного состава полозов – m êñ m êý y êý1 y î ñí f ñò.êñ æ êý y êý1 y ê lêý0 l2 sin 1 æ y y æ êñ0 ñâÿçè y êý1 y êý2 rêý y êý1 1l 2 y ê f ñò.êñ êñ êý1 Ðð n Sêý1 r y f P m a k k 2 0 cos k 0 t ; êñ êý1 ñò.êñ y êñ S æ êñ0 k 1 (4) m m y y f æ y y l l sin êñ êý êý2 î ñí ñò.êñ êý ê ý2 ê êý0 2 2 æ êñ yêý2 yêñ0 æ ñâÿçè yêý2 yêý1 rêý yêý2 2l2 yê f ñò.êñ Ðð n Sêý2 r y f P m a k k 2 0 cos k 0 t ; y êñ êñ êý2 ñò.êñ S æ êñ0 k 1 уравнения движения штанг каретки токоприемника – lø2 J 0,5m l y y f ø 1 æ ø l1l3 cos 1 ø ø ê î ñí ñò.êñ 1 2 2 2 2 lø 0 / l1 l3 2l1l3 sin 1 1 æ êý lêý0 y êý1 y ê l 2 cos 1 0,5l 2 sin 21 r l2 y l y l f l P y y P Sêý1 y y êý1 2 ê 2 ñò.êñ 2 êò1 êý1 ê x êý1 ê êý 1 2 S S Py êý1 l2 cos 1; S (5) 2 lø J 0,5m l y y f æ ø l1l3 cos 2 ø ø ê î ñí ñò.êñ 2 ø 2 2 l / l2 l2 2l l sin 1 æ l y y l cos 0,5l 2 sin 2 1 3 1 3 2 êý êý0 êý2 ê 2 2 2 2 ø0 S rêý 2l22 yêý2l2 y ê l2 f ñò.êñl2 Pêò2 y êý2 y ê Px êý2 y êý2 y ê S Sêý2 l2 cos 2 . Py S Решение систем (2) – (5) выполнено с помощью универсальной математической программы MathCAD, для этого система уравнений была преобразована к виду: rê yê y ð f ñò.êñ rêý 2yê f ñò.êñ yêý1 yêý2 l2 1 2 Py 8 y p f y p , y p , y ê , y ê , y î ñí , y î ñí , y î ñí ,f ñò.êñ ; y f y , y , y , y , y , , , , , , , y , y , y , y ,f p p ê ê î ñí 1 1 1 2 2 2 êý1 êý1 êý2 êý2 ñò.êñ ; ê f y , y , y , y , , , , y , y ,f ê ê ê î ñí 1 1 1 êý1 êý1 ñò.êñ ; 1 (6) f y , y , y , y , , , , y , y ,f ; 2 ê ê ê î ñí 2 2 2 êý2 êý2 ñò.êñ yêý1 f y ê , y ê , y î ñí , 1 , 1 , y êý1, y êý1, y êý1, y êý2 ,f ñò.êñ ; yêý2 f yê , yê , yî ñí , 2 , 2 , y êý1 , y êý2 , y êý2 , y êý2 ,f ñò.êñ . В результате решения системы уравнений (6) получены графики зависимости перемещений и скоростей движения элементов токоприемников от времени. Силы контактного нажатия определяются по формулам: Pêò1 æ êñ yêý1 yêñ0 rêñ yêý1 f ñò.êñ mêñ yêý1 æ ñâÿçè yêý1 yêý2 ; (7) Pêò2 æ êñ yêý2 yêñ0 rêñ yêý2 f ñò.êñ mêñ yêý2 æ ñâÿçè yêý2 yêý1 . Разработанная модель для расчета взаимодействия токоприемника с контактной сетью позволила добиться приемлемой сходимости расчетных и экспериментальных данных, полученных в ходе линейных испытаний на участке Лихославль – Калашниково Октябрьской железной дороги (токоприемник фирмы Siemens, контактная подвеска – КС-200-06; расхождение результатов – не более 6,5 %). С использованием предложенной математической модели расчета получены зависимости среднеквадратического отклонения (СКО) контактного нажатия токоприемника фирмы Siemens от скорости движения при различной жесткости кареток полоза (рис. 2), совпадающие с результатами линейных испытаний (рис. 3) на участке Лихославль – Калашниково. Из графиков рис. 2 видно, что на скорости 220 км/ч наблюдается резонанс, приводящий к увеличению СКО контактного нажатия; снижения влияния резонанса можно добиться уменьшением жесткости верхнего узла до 4,5 кН/м, при этом необходимо учитывать, что чрезмерное уменьшение жесткости приведет к сдвигу резонанса в сторону меньших скоростей и увеличению амплитуды СКО контактного нажатия. Введение в верхний узел токоприемника элементов вторичного подрессоривания контактных элементов позволяет для скоростей до 250 км/ч в два раза уменьшить значение СКО контактного нажатия и практически убрать резонанс на скорости 220 км/ч (рис. 4), при этом наименьшее СКО контактного нажатия соответствует жесткости каретки и элементов вторичного подрессоривания, равной 3,0 и 3,0 кН/м соответственно (рис. 5). Расчет системы «токоприемник – контактная подвеска» на динамическую устойчивость представляет собой определение областей динамической неустойчивости, форма которых определяет поведение исследуемой системы при различных внешних воздействиях (например, при влиянии кривой жесткости 9 контактной подвески в пролете). В результате расчета на динамическую устойчивость определены собственные частоты колебаний системы «токоприемник – контактная подвеска» (3,5; 2,7; 2,63; 1,187; 1,13 и 1,96 Гц), в диапазоне рабочих скоростей наблюдается единственная область динамической неустойчивости, которая соответствует скорости движения 340 км/ч. Для исследуемого диапазона скоростей движения определены области динамической неустойчивости токоприемника в зависимости от скорости движения подвижного состава для частоты 1,13 Гц (рис. 6). Результаты расчета показали, что скорость, на которой будет в наибольшей степени проявляться параметрический резонанс, составляет 340 км/ч, данная скорость соответствует максимуму главной области неустойчивости. Вторая и третья области неустойчивости намного меньше главной области, следовательно, на скоростях 150 – 230 км/ч заметное увеличение СКО контактного нажатия в пролете будет возникать только при больших коэффициентах возбуждения μ (жкс0). Полученные расчетные зависимости подтверждаются результатами линейных испытаний. 100 100 3,0 4,5 6,0 Н Н - 160 км/ч; - 180 км/ч; 60 60 - 200 км/ч; - 220 км/ч; жк=10,0 кН/м sРкт 40 sРкт 40 - 240 км/ч 20 20 0 0 100 200 V 300 км/ч 500 Рис. 2. Зависимость СКО контактного нажатия токоприемника от скорости движения при различной жесткости кареток полоза 15-й 13-й Анкерный участок Рис. 3. Зависимость СКО контактного нажатия при различных скоростях движения электроподвижного состава (Лихославль – Калашниково) По результатам проведенных исследований можно сделать вывод, что предложенная методика расчета взаимодействия токоприемника электроподвижного состава с контактной подвеской позволяет рассчитать ряд известных и новых конструкций токоприемников и определить их параметры для обеспечения надежного и качественного токосъема. В третьем разделе предложены конструкции верхних узлов, повышающих нагрузочную способность токоприемников, и рассмотрены предъявляемые к ним технические нормы. В ОмГУПСе разработаны две конструкции полоза токоприемника: полоз токоприемника с неоднородными по ширине контактными элемен10 тами, который позволяет снимать большие тяговые токи за счет исключения переходного сопротивления между коробом и контактными накладками, а также улучшает динамические свойства полоза за счет снижения массы контактных накладок и введения элементов вторичного подрессоривания; полоз токоприемника, который позволяет стабилизировать нажатие токоприемника на контактный провод за счет изменения его ширины, обеспечивая равномерный износ контактных элементов, и снимать большие тяговые токи за счет улучшенных динамических свойств полоза. 140 140 Н Н 100 100 80 80 4,5 и 6,0 6,0 и 3,0 4,5 и 4,5 sРкт 60 sРкт жк=4,5 кН/м и жкэ=3,0 кН/м 40 4,5 и 3,0 40 20 0 60 жк=3,0 кН/м и жкэ=3,0 кН/м 20 100 200 V 300 км/ч 500 Рис. 4. Зависимость СКО контактного нажатия от скорости движения при различной жесткости пружин подрессоривания контактных элементов 0 100 200 V 300 км/ч 500 Рис. 5. Зависимость СКО контактного нажатия от скорости движения при различной жесткости пружин кареток На основании результатов расчета предложена схема верхнего узла Н/м токоприемника, позволяющая стабилизировать контактное нажатие токо866,4 приемника и увеличить его нагрузочную способность при увеличении 577,6 ж скорости движения электроподвиж144,4 ного состава, определены технические параметры верхнего узла. 0 км/ч В четвертом разделе описаны V методики лабораторных испытаний Рис. 6. Области динамической разработанных элементов и узлов тонеустойчивости токоприемника коприемников. Испытания элементов для частоты 1,13 Гц и узлов токоприемников – это процесс экспериментального определения качественных и количественных харак11 1444,0 кс пс теристик, свойств объекта и его функций. В лаборатории «Контактные сети и линии электропередачи» ОмГУПСа разработаны стенды, позволяющие проводить все виды износных и нагрузочных испытаний, в том числе: стенд для комплексного исследования контактных элементов токоприемников, позволяющий реализовать токовые нагрузки в диапазоне от 0 до 1500 А при скоростях до 300 км/ч с учетом приведенных масс рам токоприемника и кареток; кольцевой стенд для имитации элементов контактной подвески при испытаниях токоприемников, рассчитанный на протекание токов до 3000 А в часовом режиме и до 2000 А – в суточном; разрывной стенд для исследования физико-механических свойств контактных элементов и проводов. Использование предлагаемого стенда позволяет получить износные характеристики с учетом неравномерности контактного нажатия и отрывов, приводящих к повышенному электрическому износу. Исследование взаимодействия образцов контактных элементов с контактными проводами целесообразно проводить в соответствии с методикой ОмГУПСа, которая включает в себя следующие виды испытаний: определение допустимого тока контактного элемента при движении с различными нажатиями и скоростями движения производится на износном стенде в широком диапазоне контактного нажатия при протекании переменного и постоянного тока различной полярности от 0 до 1500 А при скоростях движения 50, 100, 150, 200, 250, 300 км/ч; определение зависимости превышения температуры контактного элемента от величины снимаемого тока производится для уровней контактного нажатия, определенных ранее, для скоростей движения 50, 100, 150, 200, 250, 300 км/ч с соответствующим обдувом; определение среднего износа контактного элемента производится во время ресурсных испытаний при протекании номинального тока, при скорости движения 250 км/ч, контактном нажатии, определенном ранее; определение удельного износа контактного элемента и контактных проводов на единицу пробега в зависимости от нажатий, скорости движения и значения снимаемого тока. В пятом разделе рассмотрены результаты экспериментальных исследований предложенных конструктивных решений верхнего узла токоприемников и рассчитана их технико-экономическая эффективность. Анализ данных, полученных в результате экспериментальных исследований, позволяет судить о параметрах и характеристиках предложенных конструкций верхних узлов токоприемников, современных контактных элементов, а также прогнозировать их работу в условиях эксплуатации и технико-экономическую эффективность применения данных конструкций на электрическом транспорте. В ходе проведения нагрузочных испытаний получены зависимости разницы температуры нагрева набегающего и сбегающего рядов контактных эле12 ментов полоза при изменении его ширины для различных скоростей движения и снимаемых токов (рис. 7, 8). Из полученных графиков (см. рис. 7, 8) видно, что чем уже полоз, тем больше разница температуры нагрева набегающего и сбегающего рядов вставок. Кроме того, при увеличении ширины полоза на 500 мм и более разница температур рядов вставок уменьшается незначительно, что подтверждают расчетные кривые. 350 А 300 А 250 А 250 км/ч 200 км/ч 150 км/ч Рис. 7. Разница температуры нагрева набегающего и сбегающего рядов контактных элементов полоза при изменении его ширины для различных скоростей движения (Рр=100 Н; I=350 А) Рис. 8. Разница температуры нагрева набегающего и сбегающего рядов контактных элементов полоза при изменении его ширины для различных снимаемых токов (Рр=100 Н; Vдв = 200 км/ч) Для дальнейшего эксперимента исследуемый полоз был оборудован подрессоренными рядами контактных элементов, жесткость пружин вторичного подрессоривания контактных элементов составляла 3,0 кН/м. Испытания проводились в той же последовательности, что и для полоза с неподрессоренными контактными элементами. Введение элементов вторичного подрессоривания контактных элементов позволяет в два раза уменьшить разницу температуры нагрева набегающего и сбегающего рядов контактных элементов, не увеличивая значительно ширины полоза токоприемника. При экспериментальном определении износных характеристик контактных элементов исследовались опытные образцы современных контактных элементов. Из полученных зависимостей видно, что для дисперсно-упрочненного контактного элемента типа «Сэндвич» на основе железа с графитовыми стержнями в продольных пазах (рис. 9) наилучшее Рис. 9. Износные характеристики удельное статическое нажатие на 13 контактных элементов контактный провод составляет 0,35 – 0,38 Н/мм2. Полученные данные позволяют рекомендовать для исследуемых контактных элементов наилучшее статическое нажатие токоприемника на контактный провод в процессе эксплуатации, обеспечивая тем самым экономичный токосъем при минимальном износе контактирующих элементов. Экономический эффект от внедрения предложенных полозов токоприемников электроподвижного состава достигается за счет снижения затрат на их обслуживание и составляет 13,5 млн р. на 100 токоприемников за 10 лет, инвестиционный проект можно считать экономически эффективным, так как индекс рентабельности инвестиций по результатам расчетов больше единицы. ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ 1. На основании проведенного анализа существующих конструкций верхних узлов токоприемников и их характеристик выявлены пути обеспечения качественного токосъема за счет повышения нагрузочной способности токоприемника, уменьшения приведенной массы и износа контактных элементов путем их подрессоривания и использования современных материалов. 2. Усовершенствована методика расчета взаимодействия токоприемников с контактной сетью с учетом различного исполнения верхнего узла токоприемника, в которой система токосъема представлена в виде математической модели с шестью степенями свободы и введена величина «изгибной жесткости», имитирующая упругие связи в подвеске, позволяющая определить параметры токосъемных устройств для обеспечения надежного и качественного токосъема. 3. На основании полученных в результате математического эксперимента данных разработаны конструкции верхних узлов токоприемников с возможностью передачи рабочего тока до 3000 А при скоростях движения электроподвижного состава до 250 км/ч. 4. Разработаны методики и оборудование, обеспечивающие проведение лабораторных испытаний разработанных верхних узлов токоприемников и перспективных контактных пар. 5. Проведены экспериментальные исследования разработанных устройств, подтверждающие их работоспособность. Экономический эффект от использования модернизированных токоприемников составляет 13,5 млн р. на 100 токоприемников за 10 лет, срок окупаемости инвестиций составляет два года. Список работ, опубликованных по теме диссертации 1. Ф и н и ч е н к о В.Н. Пути повышения нагрузочной способности токоприемников электроподвижного состава / В.Н. Ф и н и ч е н к о // Ресурсосберегающие технологии на железнодорожном транспорте: Материалы всерос. науч.техн. конф. с междунар. участием. Красноярск: Гротеск, 2005. Т. 1. С. 457 – 462. 2 П а в л о в В.М. Пути улучшения взаимодействия токоприемника с кон14 тактной подвеской / В.М. П а в л о в , В.Н. Ф и н и ч е н к о // Повышение динамических качеств подвижного состава и поезда в условиях Сибирского региона: Межвуз. темат. сб. науч. тр. / Омский гос. ун-т путей сообщения. Омск, 2006. С. 37 – 40. 3. Условия и предпосылки получения фактических параметров и характеристик контактных подвесок в ходе проведения линейных испытаний / В.М. П а в л о в , А.Г. Г а л к и н , В.Н. Ф и н и ч е н к о и др. // Транспорт Урала / Уральский гос. ун-т путей сообщения. Екатеринбург, 2007. № 3. С. 51 – 53. 4. Повышение достоверности лабораторных исследований с применением износных стендов / О.А. С и д о р о в , А.Н. С м е р д и н , В.Н. Ф и н и ч е н к о и др. // Политранспортные системы: Материалы V всерос. науч.-техн. конф. / Сиб. федер. ун-т, Политехн. ин-т. Красноярск, 2007. Ч. 1. С. 355 – 359. 5. Ф и н и ч е н к о В.Н. Совершенствование эксплуатационной работы токоприемников электроподвижного состава / В.Н. Ф и н и ч е н к о // Актуальные проблемы Транссиба на современном этапе. Кадровое и научно-техническое обеспечение процессов интеграции в мировую транспортную систему: Тез. междунар. науч.-практ. конф. / Сибирский гос. ун-т путей сообщения. Новосибирск, 2007. Ч. 1. С. 181, 182. 6. П а в л о в В.М. Совершенствование методов исследований контактных элементов устройств токосъема / В.М. П а в л о в , И.Е. Ч е р т к о в , В.Н. Ф и н и ч е н к о // Электрификация и организация скоростных и тяжеловесных коридоров на железнодорожном транспорте: Тез. докл. IV междунар. симпозиума «Eltrans-2007» / ПГУПС. СПб, 2007. С. 78. 7. Пат. РФ на полезную модель № 58992, МПК В 60 L 5/00. Полоз токоприемника электроподвижного состава / И.И. Г а л и е в , В.М. П а в л о в , И.Е. Ч е р т к о в , В.Н. Ф и н и ч е н к о . – № 2006122819/22; Заявлено 26.06.2006; Опубл. 10.12.2006 // Открытия. Изобретения. 2006. № 34. 8. Пат. РФ на полезную модель № 68975, МПК В 60 L 5/00. Полоз токоприемника электроподвижного состава / И.И. Г а л и е в , В.М. П а в л о в , А.Н. С м е р д и н , И.Е. Ч е р т к о в , В.Н. Ф и н и ч е н к о . – № 2007128550/22; Заявлено 24.07.2007; Опубл. 10.12.2007 // Открытия. Изобретения. 2007. № 34. 9. Пат. РФ на полезную модель № 68974, МПК В 60 L 5/00. Стенд для комплексного исследования контактных элементов токоприемника / И.И. Г а л и е в , В.М. П а в л о в , О.А. С и д о р о в , А.Н. С м е р д и н , И.Е. Ч е р т к о в , В.Н. Ф и н и ч е н к о . – № 2007128548/22; Заявлено 24.07.2007; Опубл. 10.12.2007 // Открытия. Изобретения. 2007. № 34. ___________________________________________________ Типография ОмГУПСа. 2008. Тираж 120 экз. Заказ 15 . 644046, г. Омск, пр. Маркса, 35 16