Фотограмметрия вчера, сегодня, завтра МИИГАиК 17 ноября 2015 Гук А.П.
реклама

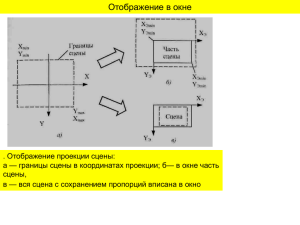
Фотограмметрия вчера, сегодня, завтра Гук А.П. Чибуничев А.Г. МИИГАиК 17 ноября 2015 Этапы развития фотограмметрии Аналоговая фотограмметрия Аналитическая фотограмметрия Цифровая фотограмметрия Конец 19 века конец 20 века середина 50х – начало 2000х Конец 80х годов настоящее время - Аналоговые АФА - Фототеодолиты - Стереокомпараторы + компьютеры - Аналитические стереоплоттеры - Цифровые АФА - Цифровые камеры - Цифровые фотограмметрические системы - Аналоговые АФА - Фототеодолиты - Аналоговые универсальные стереоприборы - Фототрансформаторы Факторы, влияющие на развитие фотограмметрии: - Разработка новых и совершенствование существующих аэро, космических и наземных съемочных систем - Разработка новых и совершенствование существующих алгоритмов автоматической обработки снимков - Развитие компьютерной техники и интернета Цифровые АФА с наклонными камерами Leica RCD30 Oblique Vexcel Osprey 2 IGI Quattro DigiCam Oblique VisionMap A3 Edge Беспилотники Мобильные картографические системы Измерения, используемые или планируемые к использованию для определения элементов внешнего ориентирования сенсоров Инерциальные системы Аэрорадиолокационная интерферометрия Воздушное лазерное сканирование Аэросъемка с помощью сканерных камер Аэросъемка с помощью кадровых камер Аэросъемка с помощью кадровых камер с БВС Наземные мобильные картографические системы x: обычно используется. +: планируется использовать. ГНСС Одометр Атомные часы Связующ ие точки Связующ ие линии Связующие плоскости x x x x x x x x x x x x x x + x x x x x + Опорные точки x + + x x x x + x x Новые алгоритмы - Алгоритмы автоматической фототриангуляции - Автоматическое нахождение связующих точек, прямых линий и плоскостей - Совместное уравнивание всех измерений (полевых геодезических, бортовых и фотограмметрических) - Самокалибровка - Алгоритмы отождествления соответственных точек - Алгоритмы построения плотных моделей поверхности - Алгоритмы построения действительного ортофотоплана на основе плотной ЦМП - Алгоритмы автоматической обработки плотной цифровой модели поверхности с целью создания ЦМР, выделения домов, дорог и других векторных объектов с построением реалистических 3D моделей - алгоритмы распознавания образов с целью автоматической векторизации объектов по снимкам. Самокалибровка Фурье a 11 X X S a 21 Y YS a 31 Z Z S x dx 0 a 13 X X S a 23 Y YS a 33 Z Z S a 12 X X S a 22 Y YS a 32 Z Z S y0 f y dy 0 a 13 X X S a 23 Y YS a 33 Z Z S x0 f 𝑀 𝑛=𝑁 𝑑𝑥 = 𝑁 (𝑎𝑚,𝑛 𝑐𝑚,𝑛 + 𝑏𝑚,𝑛 𝑠𝑚,𝑛 ) + 𝑚=1 𝑛=−𝑁 𝑀 (𝑎0,𝑛 𝑐0,𝑛 + 𝑏0,𝑛 𝑠0,𝑛 ) 𝑛=1 𝑛=𝑁 𝑑𝑦 = 𝑁 (𝑎′𝑚,𝑛 𝑐′𝑚,𝑛 + 𝑏′𝑚,𝑛 𝑠′𝑚,𝑛 ) + 𝑚=1 𝑛=−𝑁 Ряды Фурье – ортогональны и универсальны (𝑎′0,𝑛 𝑐′0,𝑛 + 𝑏′0,𝑛 𝑠′0,𝑛 ) 𝑛=1 Полуглобальный метод отождествления соответственных точек 𝑬 𝒑 = 𝑪𝒙𝒚𝒑 + 𝑷1 𝒑 − 𝒑𝒒 = 1 + 𝑷2 𝒑 − 𝒑𝒒 > 1 Модифицированный метод полуглобального отождествления соответственных точек 𝑪𝑿𝒀𝒁 𝑬 𝒁 = 𝑪𝑿𝒀𝒁 + 𝑷1 𝒁 − 𝒁𝒒 = 1 + 𝑷2 𝒁 − 𝒁𝒒 > 1 Пример плотного облака точек, полученное в программе SURE по снимкам PentaCam IGI Принцип построения действительного ортофото по ЦМП ЦМП М М d d Ортофото М0 Ортофото по ЦМР М0 Ортофото по ЦМП Развитие компьютерной техники и интернета - параллельные вычисления - облачные технологии - интеграция ЦФС с геопорталами для обмена данными Спасибо за внимание