АЭРОДИНАМИКА НАБОР ВЫСОТЫ И СНИЖЕНИЕ
реклама

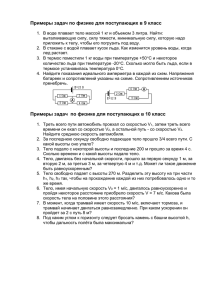
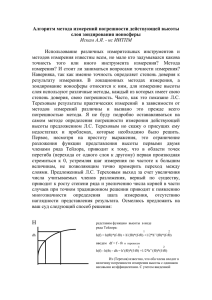
АЭРОДИНАМИКА НАБОР ВЫСОТЫ И СНИЖЕНИЕ СОДЕРЖАНИЕ: 1. Набор высоты 2. Снижение ТЕМЫ: Общие сведения о наборе высоты; Поляра скоростей набора высоты. Первые и вторые режимы набора; Потолки самолета. К содержанию Схема сил, действующих на самолёт при наборе высоты К содержанию К темам Условие прямолинейности полёта Y G y G cos н Условие равномерности полёта Pн X Gx X G sin н К содержанию К темам Воспользовавшись первым условием: Y Cy V 2 2 S G cos н определим скорость, потребную при наборе высоты: 2G cos н Vн Vгп cos н C y S К содержанию К темам Воспользовавшись вторым условием P = X + G sinqн определим тягу, потребную при наборе высоты. Для уравновешивания лобового сопротивления при наборе высоты необходима тяга такая же, как и в горизонтальном Составляющую веса ∆Р. Следовательно полете, Gsinθ т.е. Pгп=Х=G/К. уравновешивает избыток тяги G Pн Pгп P G sin н K Как видно, тяга, потребная для набора высоты, больше тяги, потребной в горизонтальном полете, на величину Gsinθ=∆Р, причем, чем больше полетный вес и угол набора, тем требуется больше дополнительной тяги. К содержанию К темам Vн Vy н н При выполнении набора высоты ∆Р=Gsinθ. Из этого выражения можно определить угол набора высоты: P Pр Pгп sin н G G Вертикальная скорость набора высоты – это высота, которую набирает самолет за 1 с. Из треугольника скоростей: P Vy V sin н V G К содержанию К темам Поляра скоростей набора высоты. Первые и вторые режимы набора. Зависимость между скоростью по траектории, вертикальной скоростью и углом набора можно представить в виде одного графика, который носит название поляры скоростей набора высоты. К содержанию К темам Режим наиболее быстрого набора высоты – определяется проведением касательной к поляре скоростей набора параллельно оси скорости. Этот режим набора применяется в случае необходимости быстро набрать заданную высоту. Режим наиболее крутого набора – определяется проведением касательной к поляре скоростей из начала координат. Этот режим набора применяется, когда необходимо «перетянуть» самолет через близко расположенное препятствие. К содержанию К темам Два режима набора высоты При одном угле θ набор высоты может совершаться на двух режимах: Первый - 1 нв ;V1 Vнв; при увеличении угла атаки угол наклона траектории увеличивается. Второй - 2 нв ;V2 Vнв; при увеличении угла атаки угол набора θ увеличивается. Границей первых и вторых режимов набора, как и в горизонтальном полете, является наивыгоднейшая скорость. К содержанию К темам Благоприятным режимом набора высоты является первый режим, т.к. при больших скоростях полёта самолёт имеет хорошую устойчивость и управляемость и, отклоняя штурвал на себя, пилот обеспечивает одновременное увеличение α и θ. К содержанию К темам Потолки самолёта Высота полета, на которой вертикальная скорость установившегося набора равна нулю, называется теоретическим (или статическим) потолком самолета. Высота полета, на которой вертикальная скорость 0,5 5 установившегося набора равна м ( м для сверхзвуковых самолётов), называется практическим потолком самолета. Разница между теоретическим и практическим потолком у современных самолетов невелика и не превышает 200 м. К содержанию К темам а - график зависимости Vу от высоты полета; б кривые потребных и располагаемых тяг на теоретическом потолке К содержанию К темам Современные самолеты при полете с большими скоростями полета обладают настолько большим запасом кинетической энергии, что могут использовать его для набора высоты. Динамический потолок самолета – высота, которой достигает самолет в результате энергичного вертикального маневра (горки) после разгона до большой горизонтальной скорости, используя для набора высоты не только тягу двигателей, но и кинетическую энергию, накопленную при разгоне. К содержанию К темам ТЕМА: Общие сведения о снижении Поляра скоростей снижения К содержанию К содержанию К темам Для осуществления снижения необходимо: а) условие выполнения полета с постоянным углом снижения: Y =mg cosθ б) условие выполнения снижения с постоянной скоростью: X =mg sinθ + P К содержанию К темам Если тяга Р=0, то самолет планирует. Постоянный угол планирования обеспечивается равенством: Y = mg cos θ, а полет с постоянной скоростью будет при равенстве: X = mg sinθ. К содержанию К темам Воспользовавшись условием: Y Cy V 2 2 S G cos сн определим потребную скорость снижения: Vсн 2G cos сн Vгп cos сн C y S К содержанию К темам При выполнении снижения Х = Gsinθ + Рсн. Из этого равенства угол снижения определяется по формуле: X Pсн sin сн G Так как при малых углах снижения Y»G и sin qcн » tg qсн, то: X Pсн 1 Pсн tg сн Y G K G Если самолет планирует, то Рсн=0, а угол планирования будет: tg пл 1 K Отсюда видно, что угол планирования зависит от аэродинамического качества (угла атаки, положения шасси и механизации крыла, обледенения самолета и числа М). При наивыгоднейшем угле атаки аэродинамическое качество максимальное, а угол планирования минимальный. К содержанию К темам Вертикальная скорость снижения определяется по формуле: 1 Pсн V y V sin сн Vсн K G Величина вертикальной скорости снижения зависит от полетного веса, угла атаки, положения шасси и механизации крыла (закрылков, предкрылков и гасителей подъемной силы), обледенения самолета, плотности воздуха (высоты полета), числа М и величины тяги К содержанию К темам 1 Pсн V y V sin сн Vсн K G при увеличении полетного веса самолета вертикальная скорость снижения увеличиваются; скорость и при выпуске шасси и механизации крыла, а также при обледенении, аэродинамическое качество самолета уменьшается, угол снижения и вертикальная скорость возрастают; при меньшей плотности воздуха вертикальная скорость увеличиваются; скорость снижения и при снижении на больших числах М (на высоте) вследствие сжимаемости воздуха аэродинамическое качество уменьшается, угол и вертикальная скорость снижения возрастают; увеличение тяги при снижении уменьшает угол и вертикальную скорость снижения. К содержанию К темам Дальность снижения – это расстояние, которое проходит самолет по горизонту, снижаясь с данной высоты. H сн сн Lсн Дальность снижения определяется по формуле: Если самолет планирует, то: 1 tg сн K а дальность планирования: Lпл H K H сн Lсн tg сн Наибольшая дальность планирования будет при aнв, так как аэродинамическое качество при этом максимальное. К содержанию К темам Если тяга Рсн>0, то: а дальность снижения: 1 Pсн tg сн K G H сн Lсн 1 Pсн K G К содержанию К темам График, показывающий зависимость вертикальной скорости снижения от поступательной скорости на различных углах атаки, называется полярой скоростей снижения. К содержанию К темам По поляре скоростей планирования можно определить ряд характерных скоростей и режимов планирования: Vэк- скорость планирования, соответствующая Vнв- Vyмин; точка касания поляры прямой, проведённой из начала координат. На этой скорости угол снижения минимальный, а дальность планирования - максимальная. К содержанию К темам Два режима планирования При одном угле наклона траектории θ планирование может совершаться в различных режимах: Первый - 1 нв ;V1 Vнв ; планирование на малых углах атаки с большими скоростями. На этом режиме при случайном увеличении угла атаки угол планирования уменьшается. Второй - 2 нв ;V2 Vнв; планирование на больших углах атаки с малыми скоростями. При увеличении α планирование становится более крутым и возможно попадание самолёта в диапазон закритических углов атаки. К содержанию К темам Благоприятным является первый режим планирования, т.к. планирование на втором режиме опасно. К содержанию К темам