по материалам эл. учебника проф. Шевцова С.Н.
реклама

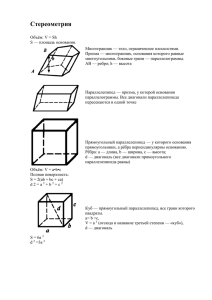
Имитационное моделирование (по материалам эл. учебника проф. Шевцова С.Н.) Система Simulink Пакет Simulink представляет собой мощнейший инструмент для создания, исследования и практического использования моделей широкого круга систем, включая линейные и нелинейные с дискретным и непрерывным временем. Являясь расширением системы Matlab, Simulink использует все его графические и вычислительные средства, добавляя возможности: А. быстро создать символическую схему моделируемого устройства Б. гибкого изменения параметров каждого используемого блока, создания субблоков, а также их векторизации и регистрации пересечения нуля. В. наблюдения динамики поведения любых переменных модели с помощью гибко настраиваемых средств визуализации. Г. генерации кода разработанных моделей на языках С и С++, откомпилировав который, пользователь получает полноценное автономное Windows-приложение. Д. анимации движущихся систем и создания видеоклипов. Графический интерфейс программы позволяет создать и отладить модель исследуемого процесса. Библиотека модулей Simulink Библиотека основных модулей включает шесть отделов: Источники– модули, создающие сигнал возбуждения различной амплитуды, формы, периодичности, сдвига по фазе. В зависимости от точки, куда подводится этот сигнал, он может быть по своей природе силой, скоростью, давлением, информационным сигналом и т.д. Стоки – элементы, на которые подается выходной сигнал, и благодаря этому, может быть зарегистрирован. Дискретные элементы – элементы, воспринимающие и трансформирующие дискретные (цифровые) сигналы, распространяющиеся через равные дискретные интервалы времени. Линейные элементы - элементы, воспринимающие и трансформирующие непрерывные (аналоговые) сигналы. Нелинейные элементы – в основном, представляют собой функции или функционалы, структурно входящие в модель. Соединители – элементы, служащие для объединения сигналов, задания начальных условий, установления точек начала и окончания работы модели. Внешние блоки и расширения – позволяют подключить внешние библиотеки, сложные и специализированные модули, а также выполнить компиляцию в С и С++ созданных моделей. Имитационное моделирование в системе MathConnex MathConnex представляет собой интегрированную среду для визуального создания проектов, связывающих различные приложения и источники данных. Эта система позволяет создавать проекты чрезвычайно сложных систем, отдельные части которых имитируются работой таких приложений, как MS Excel, MathCAD, MATLAB. Естественно, работа комплексного проекта происходит при совместном функционировании всех включенных в проект приложений. Система имеет очень высокие изобразительные возможности. Использование MathConnex целесообразно в следующих случаях: 1.Если нужно связать в общую модель отработанные модули системы, созданные в различных приложениях. 2.Если недостаточно изобразительных средств, доставляемых одним приложением. 3.Большие массивы данных в формате MS Excel необходимо обработать с использованием вычислительных средств MathCAD. 4.При моделировании нелинейных систем, изменяющих в процессе внешних воздействий реакцию на эти воздействия. Имитационное моделирование в системе GranMoS Система GranMoS предназначена для моделирования динамики гранулированных сред при воздействии на них внешнего механического возбуждения со стороны границ. Сконструировав систему, т.е. задав размеры и физико-механические свойства сферических гранул, форму ограничивающего контейнера и закон его движения, законы взаимодействия гранул друг с другом и с границами, системе предоставляют возможность развиваться в соответствии с законами динамики. Система отрабатывает каждое взаимодействие частиц, определяя момент ближайшего во времени. Такое моделирование называется управляемым событиями . Процесс моделирования может занимать от нескольких минут до десятков часов. Завершив моделирование, можно увидеть движение системы частиц в реальном времени, поле скоростей и плотности частиц. Система используется для проектирования технологических машин, работающих с гранулированными средами: вибростанков, транспортеров, сепараторов, сит и т.п. Моделирование объемных тел и поверхностей Первые системы сквозного проектирования удалось создать только тогда, когда первичными стали не чертежи машины и всех её деталей, а их трехмерные образы. Трехмерный образ изделия всегда позволяет, выполнив простейшие процедуры проектирования и оформления, получить комплект чертежей. Более того, для трехмерных конструктивных элементов связь-соответствие с инструментом и станком является простой и логичной. Поэтому практически все без исключения современные системы сквозного проектирования исходят из трехмерного представления изделия. Такое представление является по своей сути модельным. Каждое моделируемое тело сложной формы ограничено дискретной кусочно-плоской поверхностью, представляющей собой совокупность треугольных, трапециедальных и прямоугольных ячеек-сплайнов. Существуют следующие уровни визуализации: Уровень габаритных контейнеров, при котором каждый именованный трехмерный объект изображается на экране в виде прямоугольного параллелепипеда, охватывающего полностью данный объект. Уровень каркасов предусматривает изображение видимых ребер сплайновой сетки, ограничивающей тело. Уровень освещенных каркасов, при котором каркасы подсвечены так, что видна их трехмерность. На этом уровне изображаются также стороны каркасов, скрытые от наблюдателя. На уровне граней изображается поверхность тела, обтянутая оболочкой. Острые ребра сплайнов хорошо видны. На уровне освещенных граней – видны блики на ограненной поверхности тел. На уровне сглаживания граней поверхности лишены следов сплайновых ребер. Уровень сглаживания граней и световых бликов дает наиболее реалистичное изображение. В любой системе 3D- моделирования имеется обширный набор средств создания трехмерных объектов. В том числе: - Создание объектов на основе трехмерных примитивов. Стандартные примитивы – это типовые геометрические тела, такие, как параллелепипеды, цилиндры, конусы, комбинируя которые можно построить более сложные объекты. -Создание объектов на основе сечений. Этот метод предполагает использование двух обязательных элементов: сечения – формы (Shape) и образующей – пути (Path), по которому будет перемещаться сечение, формируя при этом тело или оболочку. Поэтому вначале необходимо построить сечение будущей поверхности и путь, по которому это сечение будет перемещаться (кинематическая операция). - Клоны и ортогональные преобразования. Многие изделия обладают повторяющимися конструктивными элементами, например, группа отверстий при фланцевом креплении и т.д. Для исключения необходимости повторного формирования таких элементов применяется операция клонирования (создание массивов ). - Создание объектов с помощью модификаторов. Модификаторы нужны для изменения объектов, например, скручивание, изгиб, заострение.