1. Система фазовой синхронизации
реклама

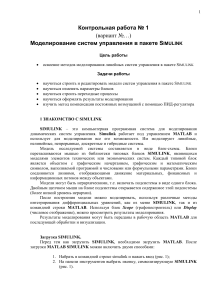
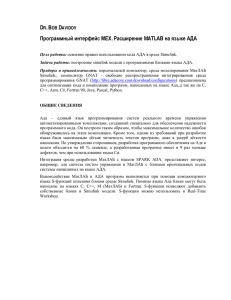
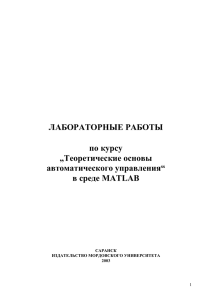
Поволжская Государственная Академия Телекоммуникаций и Информатики МЕТОДИЧЕСКИЕ УКАЗАНИЯ к контрольной работе по дисциплине "Цифровая обработка сигналов" для специальности 230105 Одобрено Методическим Советом ПГАТИ Авторы-составители: АКЧУРИН Э.А., д.т.н., профессор Редактор: АКЧУРИН Э.А., д.т.н., профессор Рецензент: КОРАБЛИН М.А., д.т.н., профессор Самара 2008 2 Введение Контрольная работа включает в себя 3 задачи ► ► ► Система фазовой синхронизации. Коррекция сигнала данных. Моделирование устройства в Simulink. 1. Система фазовой синхронизации 1.1. Подготовка к работе 1. 2. 3. Изучить: ► Принципы фазовой синхронизации. ► Программирование в Mathcad.. Составить программу моделирования. Проанализировать данные, получаемые при прогоне программы. 1.2. Контрольные вопросы 1. 2. 3. 4. Принцип фазовой синхронизации. Что такое УКГ. Выбор частоты дискретизации. Влияние петлевого усиления на переходные процессы в системе. 1.3. Задание к работе Составить программу моделирования в Mathcad системы фазовой синхронизации, которая подстраивает частоту управляемого генератора (УКГ) под частоту опорного сигнала, равную номинальному значению частоты УКГ. При выполнении работы можно использовать алгоритм работы УКГ, представленный в примере исполнения. Варианты заданий: № 1. 2. 3. 4. 5. 6. 7. 8. 9. Частота дискретизации 8 9 10 11 12 13 14 15 16 Относительная расстройка 0.005 0.006 0.007 0.008 0.009 0.01 -0.004 -0.005 -0.006 3 10. 11. 12. 13. 17 18 19 20 1.4. Пример выполнения -0.007 -0.008 -0.009 -0.01 4 5 2. Коррекция сигнала данных 2.1. Подготовка к работе 1. 2. 3. Изучить: ► Принципы коррекции символов данных. ► Программирование в Mathcad.. Составить программу моделирования. Проанализировать данные, получаемые при прогоне программы. 2.2. Контрольные вопросы 1. 2. Принцип коррекции символов данных. Коррекция плавной огибающей. 2.3. Задание к работе Составить программу моделирования в Mathcad системы коррекции сигнала данных плавной огибающей. Система сглаживает сигнал данных, уменьшая ширину его спектра. При выполнении работы можно использовать алгоритм работы, представленный в примере исполнения. Варианты заданий: № 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. Число символов 4 5 6 7 8 9 10 11 12 13 14 15 16 Длительность символов 8 10 12 14 16 18 20 22 24 26 28 30 32 6 2.4. Пример выполнения 7 8 3. Моделирование устройства в Simulink 3.1. Подготовка к работе По указанной литературе изучить: основы Simulink, правила создания моделей в Simulink, правила моделирования в Simulink, иерархическую библиотеку Simulink. Разработать структуру модели устройства для варианта задания. 3.2. Контрольные вопросы 1. 2. 3. 4. 5. Назначение Simulink. Правила построения моделей в Simulink. Правила моделирования в Simulink. Структура иерархической библиотеки Simulink. Блоки из библиотек. 3.3. Задание к работе Создать модель устройства в соответствии с вариантом задания. Регистратор с тремя входами позволяет наблюдать сигналы на входах и выходах функциональных блоков. Провести ее моделирование. Варианты заданий № Источник сигнала 1. Sine Wave - Синус 2. Pulse Generator - Импульсы 3. Repeating Sequence - Пила 4. Ram - Линейно нарастающий 5. Chirp Signal - Переменная частота 6. Sine Wave - Синус 7. Pulse Generator - Импульсы Блоки Первый Gain – Усиление Saturation – Ограничитель Quantizer – Квантизатор Derivate – Дифференциатор Integrator – Интегратор Transport delay – Задержка Dead Zone – Мертвая зона Дополнительный Derivate – Дифференциатор Integrator – Интегратор Gain - Усиление Saturation – Ограничитель Quantizer – Квантизатор Derivate – Дифференциатор Integrator – Интегратор 9 8. Repeating Sequence - Пила 9. Pulse Generator - Импульсы 10. Chirp Signal - Переменная частота 11. Sine Wave - Синус 12. Pulse Generator - Импульсы 13. Repeating Sequence - Пила Gain – Усиление Saturation – Ограничитель Quantizer – Квантизатор Derivate – Дифференциатор Integrator – Интегратор Transport delay – Задержка Transport delay – Задержка Dead Zone – Мертвая зона Gain – Усиление Saturation – Ограничитель Quantizer – Квантизатор Derivate – Дифференциатор В таблице названия функциональных блоков даны на русском и английском языках (так, как они названы в браузере библиотеки блоков Simulink). Методические указания по созданию модели Модель устройства содержит источник сигнала, функциональные блоки и средства наблюдения за поведением системы (дисплей, численный индикатор и др.). Во всех вариантах задания нужно использовать дисплей с одним входом в задаче 1 и с двумя входами в задаче 2. Первое действие - запустить MATLAB. При этом возникает стартовое диалоговое окно, в котором докированы три встроенных окна: Command Window (командное) - справа, Launch Pad (Средства запуска) - в левом верхнем углу, Command Hustory (История команд) - в левом нижнем углу. Каждое подокно можно освободить из дока. 10 Для создания модели нужно выполнить действие File => New => Model. Это приводит к запуску программы Simulink, которая создает пустое окно модели. Далее нужно вызвать браузер библиотеки компонент, используя меню или кнопку в панели инструментов Library Brouser. Окно браузера содержит две панели: слева иерархическое дерево библиотеки, справа - содержимое выбранной в левой панели папки с блоками. В папке могут быть подбиблиотеки и блоки. Каждый блок и подбиблиотека имеют визуальный семантический образ и надпись. 11 Разместите окна браузера и модели таким образом, чтобы они не перекрывали друг друга. Теперь можно формировать модель визуальным методом. Скопируйте мышью из браузера в окно модели нужные блоки и удобно разместите их. При переносе блока в модель там создается экземпляр блока с именем, совпадающим с надписью под блоком (при необходимости, когда однотипных блоков в модели несколько, в имя блока добавляется номер). Соедините блоки коннекторами. Для этого нужно протаскивать мышь от одной соединяемой точки к другой. При отпускании кнопки мыши в модели отображается коннектор со стрелкой. Установите для каждого блока свойства. Для этого нужно на блоке сделать двойной щелчок мышью, что приведет к появлению окна со свойствами блока. Установите нужные свойства в полях окна. Пример выполнения Задание Двусторонний ограничитель синусоидального сигнала и блок мертвой зоны Создать модель. Провести ее моделирование. Формируем модель. Установим параметры блоков. У регистратора Scope изменим число осей на 3. Соединим третий вход Scope с выходом Dead Zone. Соединим вход Dead Zone с выходом Sine Wave. Выполнить моделирование. В окне Scope графики выходных сигналов. 12