Star Recognition Approach
реклама

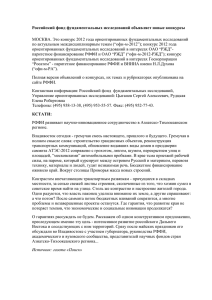
Star Recognition Approach
Real CCD-camera picture of the starry sky obtained from the Swedish Astrid-2
satellite. White bright segment is the Earth. Light strips are created by stars due
to the angular motion of the satellite. Others light points are generated by noisy.
1
Simulation of the Star
Recognition Algorithm
D ( E1 ,
(e1 ,
E1 E2 E1 [ E1 E2 ]
,
)
| E1 E2 | | E1 [ E1 E2 ] |
e1 e2 e1 [e1 e2 ]
,
)
| e1 e2 | | e1 [e1 e2 ] |
Simulation of the star recognition algorithm. Blue rectangular represents the field of view of onboard CCD-camera. The same is shown in the upper-left picture. Recognized stars with their
numbers within the Star Catalog are shown in the upper-right picture. The straight line links two
mutually outermost stars. Transformation matrix D is calculated (right-side formula) via unit
vectors of the two stars which are taken from the Catalog and calculated through measured data.
2
MUNIN Nanosatellite Engineering
Model
3
Российский наноспутник ТНС-1 с
активной магнитной системой ориентации
Для дистанционного
зондирования Земли
Стабилизация (собственным
вращением) оси симметрии на
Солнце с использованием
токовых катушек, магнитометра
и солнечных датчиков
использование глобальных
систем связи (GlobalStar,
OrbCom) для передачи
информации и управления
масса около 7 кг
4
Attitude Control System
Content of ACS
Permanent magnet
8 hysteresis rods
Content of AD
4 photodiods
horizon sensor
5
Nanosatellite TNS-0
Parameter
Magnitude
Altitude
~ 360 km
Inclination
51.6 degrs
Power sources
Two batteries
Mission control
GlobalStar/Internet
Bands
1.6/2.5/1.7 GHz
Mass
4.5 kg
ACS
Passive magnetic
6
Attitude Motion Analysis
Acquisition motion:
(initial angular velocity is
3 degrs/sec)
Steady-state motion:
7
TNS-0 N 1 Launch Campaign
(ISS, 28th of March, 2005)
8
Совместный МФТИ-ZARM
наноспутник
15 февраля 2006г.
подписано
четырехстороннее
соглашение МФТИZARM-ИПМ
им.М.В.Келдыша РАНРНИИ КП о создании
совместного
наноспутника на базе
ТНС-0
9
Прототип наноспутника
10
Gravity-gradient ACS with
magnetic torquers
Pakistanean BADR-B
experimental satellite
(launched on 10th
December, 2001 with
Meteor-3M)
50 kg mass
Sun-synchronous orbit (1050
km altitude and 98 degrees
inclination)
3-5 degree accuracy required
11
Algorithm of preliminary orientation
along vector B
M contr m B,
m
m z 0, if ( Bz Bt ) & (dBz 0) ( Bz Bt ) & (dBt 0)
0, else
Angle between axis Oz and
vector B (unit: degrees) vs
number of revolutions around
the Earth.
Librations in the vicinity of
tumbled equilibrium position
with angle of 180 degrees
correspond to required
preliminary orientation of the
satellite
12
Active damping of disturbed
motion
The Jacobi’s integral V for circular orbit is
used as a measure of deviation of the satellite
from required equilibrium
Derivative of V is governed by control torque
V (m, [w rel H])
13
Control strategy
If (m,[wrelH]) < then m=0
else
m arc min {( m, [w rel H])}
m mmax
14
Usage of the algorithm of magnetic
orientation to provide a gravity-gradient
orientation
tet33
60
S
1
2
3
50
40
30
20
10
N
0
0
5
10
15
20
25
U
30
35
40
45
50
15
Российский наноспутник ТНС-1 с
активной магнитной системой ориентации
Стабилизация (собственным
вращением) продольной оси на
Солнце с использованием
токовых катушек, магнитометра
и солнечных датчиков
использование мировых систем
связи (Глобалстар, Орбкомм,
Интернет) для передачи
информации и управления
масса около 7 кг
орбита солнечно-синхронная
высотой 650 км
Запуск – 2007 год
РНИИ КП +
ИПМ им.М.В Келдыша РАН
16
Предварительные результаты
моделирования
гашение нутаций
изменение скорости
осевой закрутки
приведение оси
вращения к заданному
направлению
17
Наше место “под Солнцем”
Область влияния: идея + математическое
моделирование + макетирование +
полунатурное моделирование = технология
Реализация и натурные испытания:
совместно с организациями
промышленности
Элементная база: MEMS + COTS
Цели: инновации + подготовка
квалифицированных кадров
18
Финансовая поддержка
выполняемых
работ
Фундаментальные разработки:
РАН
РФФИ 97-01-00910
РФФИ 00-01-00174
РФФИ 03-01-00652
РФФИ 06-01-00389
6-ой молодежный конкурс РАН
Индивидуальные гранты РФФИ для
студентов и аспирантов
INTAS, МНТЦ
Министерство науки и образования
Прикладные разработки:
Технологические разработки:
ФЦП Интеграция
Гранты Президента РФ поддержки
ведущих научных школ
Landau Network-Centro Volta (Italy)
DAAD (Germany)
Министерство промышленности,
науки и технологий России
Федеральное агентство по науке и
инновациям
НИИ Прецизионного приборостроения
РНИИ Космического приборостроения
НТЦ Реагент
Space Innovation Ltd (UK)
Institute of Space Physics (Sweden)
ZARM (Bremen, Germany)
University Federico II (Napoli, Italy)
19
Сведения об авторе
Заведующий сектором в Институте прикладной математики
им.М.В.Келдыша РАН, профессор кафедры теоретической
механики и кафедры прикладной математики МФТИ
Окончил группу 172 ФУПМ в 1977году, аспирантуру МФТИ
в 1981 году, защитил кандидатскую диссертацию в 1983
году, докторскую – в 1995 году. С 1997 года – профессор.
После окончания аспирантуры постоянно работает в
Институте прикладной математики
Читал лекции в университетах Италии, Германии, Швеции,
Англии, Португалии, Пакистана
Руководит отечественными и международными грантами и
проектами
Активно работает со студентами и аспирантами МФТИ и
других российских и зарубежных университетов
Увлечение: горные и беговые лыжи, ролики, спининг, авто
(чем дальше, тем лучше), был альпинизм и горный туризм 20
МЫ ЖДЕМ ВАС !
21