35x
реклама

УДК 622.232.72
УПРАВЛЕНИЕ ДИНАМИЧЕСИМИ СВОЙСТВАМИ ПРИВОДА
ИСПОЛНИТЕЛЬНОГО ОРГАНА ОЧИСТНОГО КОМБАЙНА
Шевченко А.А., магистрант; Гуляев В.Г., д.т.н., профессор
(Донецкий национальный технический университет, г. Донецк, Украина)
Формирование высоких динамических нагрузок в приводе
исполнительного органа очистных комбайнов при установившихся и
переходных процессах связанных с разрушением крепких включений,
является одной из основных причин снижения надежности комбайнов.
На базе выполненных исследований и выявленных закономерностей
формирования динамических нагрузок, разработаны научные основы
оптимизации динамических свойств очистных комбайнов, путем ввода в их
силовые системы виброзащитных устройств (ВЗУ) с оптимальными
параметрами [1].
Задачей данной работы является определение динамических свойств
подсистемы привода исполнительного органа очистного комбайна с ВЗУ, с
учетом требований к коэффициентам крутильной жесткости трансмиссии CТ
и линейного коэффициента сил сопротивления трансмиссии Т при сложном
спектре нагрузок на исполнительном органе.
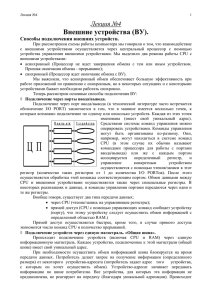
При слабом взаимодействии трансмиссии с электродвигателем
динамическую модель рассматриваемой системы можно представить как
двухмассовую, см. рис. 1.
MД
MС(t)
I1
CЭ
ε1
I2
ε2
βЭ
Рис. 1. Эквивалентная динамическая модель системы
Эквивалентные значения коэффициентов крутильной жесткости и
демпфирования для последовательно соединенных трансмиссии и ВЗУ
определяются по зависимостям:
C Э CТ C В (CТ C В ) 1 ; Э C Э2 ( В С В2 Т CТ2 ) ,
где C В , В - соответственно коэффициенты крутильной жесткости и
демпфирования ВЗУ.
С учетом принятых допущений уравнения движения для
динамической модели по рис. 1 имеют вид:
1
I 11 Э C Э M Д
I 2 2 Э C Э M С
1 2
(1)
В уравнениях (1) и на рис. 1 обозначены: M Д - момент двигателя;
M Се (t ) - момент сопротивления; I 1 - момент инерции ротора двигателя и
приведенных к нему деталей трансмиссии; I 2 - момент инерции
исполнительного органа; 1 , 2 - соответственно углы поворота двигателя и
исполнительного органа; C Э , Э - эквивалентные значения коэффициентов
жесткости и демпфирования; - суммарная угловая деформация
трансмиссии и ВЗУ. Система уравнений (1) приводится к одному
дифференциальному уравнению относительно :
(2)
2n P02 I11 M Д I 21 M C (t ) ,
Где n 0,5 Э I Э1 - коэффициент демпфирования, эквивалентный вязкому
трению; I Э I 1 I 2 ( I 1 I 2 ) 1 - эквивалентный момент инерции системы;
P0 C Э I Э - собственная круговая частота системы.
Момент сил сопротивления можно представить рядом Фурье:
m
M С (t ) M 0 M K cos( kwt K ) .Тогда
решение уравнения (2) запишется в
k 1
виде[2].
m
M0
M К cos( kt k k )
2
,
2
2 2 2
2 2 2
CЭ
K 1 ( P K ) 4n k
0
(3)
где 2 I1 ( I1 I 2 ) 1 ; k arg( P02 k 2 2 2nik ) ; k = 1, 2, …, m.
Реактивный момент, формирующийся в трансмиссии привода с ВЗУ
будет:
m
M Т Э C Э M 0 2 K Э ( ) M k cos( kt k k ) ,
(4)
k 1
где K Э ( ) - коэффициент динамичности системы, характеризующий
эффективность снижения каждой k–той гармонической составляющей от
применения ВЗУ:
(5)
K Э () (CЭ2 Э2 2 k 2 ) /[( CЭ2 I Э 2 k 2 ) Э k 2 2 ] ,
При жестком соединении исполнительно органа с приводным валом (
1
C В 0 ; В Т 0 ) в трансмиссии формируется нагрузка:
m
M Т (t ) M 0 2 M k cos( kt k ) ,
(6)
k 1
Из сравнения выражений (6) и (4) следует, что при наличии ВЗУ
динамическая нагрузка в трансмиссии привода значительно ниже, т.к.
амплитуда каждой гармонической составляющей трансформируется в
соответствии с коэффициентом K Э ( k ) . При этом в частотном диапазоне
0 k 2P0 , K Э ( ) 1 и для его снижения необходимо увеличивать Э и В .
При возмущениях с частотами K 2P0 , K Э ( ) 1 .
2
Таким образом, по уравнениям (4), (5) можно определить
рациональные параметры ВЗУ ( C В , В ) при заданных CТ и Т , и оценить
эффективность снижения амплитуд периодических составляющих нагрузок
разных частот.
Анализ показывает, что зона эффективности ВЗУ по отношению к
периодическим нагрузкам расширяется с уменьшением собственной частоты
P0 , что при заданном значении I 2 достигается снижением C В . Влияние ВЗУ
на формирование пиковых динамических нагрузок импульсного типа можно
оценить, пользуясь уравнением динамического равновесия системы по рис. 1,
под действием импульсного возмущения произвольной формы [2].
P 2 M P 2 M (t ) P 2 M ,
M
(7)
12
0
12
2 0
СИ
1 0
1
где M 12 - момент в упругой связи ВЗУ; 1 , 2 - коэффициенты,
характеризующие
соотношение масс
в
системе:
1 I 2 ( I1 I 2 ) 1 ;
2 I1 ( I1 I 2 ) 1 ; M СИ - импульс нагрузки на исполнительном органе; M 1 изменение момента двигателя за время действия импульса t и . Обычно 1 >> 2
и мало изменение момента M 1 , поэтому вторым членом в правой части
уравнения можно пренебречь.
Реакцию привода с ВЗУ на импульсное возмущение M СИ можно
характеризовать коэффициентом динамичности K Д (t и / T ) , где t и - время
действия импульса, T - период собственных колебаний системы.
Согласно [1,2] собственные частоты жестких подсистем привода (без
ВЗУ) ряда очистных комбайнов находятся в пределах 16 – 32 Гц, а
отношение t и / T {0,5 1,6} , что соответствует K Д =1,3…1,5. При введении в
состав привода ВЗУ отношение t и / T уменьшается до 0,15 - 0,35 за счет
изменения t и и T , что обуславливает снижение K Д на 20 – 40 % [2].
Полученные выше зависимости можно использовать для выбора
рациональных структурных решений и параметров ВЗУ. Учитывая
противоречивость требований к характеристикам ВЗУ, для эффективного
снижения высокочастотных периодических и пиковых нагрузок, следует
сделать вывод о целесообразности применения ВЗУ с регулируемыми
параметрами.
Перечень ссылок
1. Гуляев В.Г. Научные основы оптимизации динамических свойств
очистных комбайнов с демпфирующими устройствами// Автореферат
диссертации докт. техн. наук, Днепропетровск, ИГТМ АН УССР, 1986. – 37
с.
2. Гуляев В.Г. Динамика системы привода исполнительного органа
горного
комбайна
с
демпфирующим
устройством//
Разработка
месторождений полезных ископаемых. Вып. 75. К.: Техника,1986, с. 75 – 81
с.
3