Кинетическая энергия ИДЗ. Прим
реклама

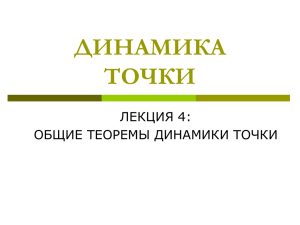
Кинетическая энергия системы материальных точек. Теорема об изменении кинетической энергии системы материальных точек Кинетическая энергия точки и твердых тел. Кинетическая энергия точки Кинетическая энергия тела при поступательном движении Кинетическая энергия тела при вращательном движении Кинетическая энергия тела при плоскопараллельном движении Кинетическая энергия системы тел mV 2 T 2 mV 2 T 2 T J z 1 2 T mVc 2 2 2 J c 2 2 T = ∑Tk Элементарная работа силы (скалярное произведение) Работа силы на конечном перемещении по кривой М0М1 dA F dr AM 0 M1 F ds M 0 M1 Работа силы на конечном перемещении в декартовой системе координат Работа момента М x1 y1 z1 xo yo zo AM 0M1 Fx dX Fy dY Fz dz 1 AM Md o Работа момента, если М-const AM M (1 0 ) Теорема об изменении кинетической энергии системы (в дифференциальной форме). dT dA dA e dA A i e i - элементарная работа внешних сил - элементарная работа внутренних сил Дифференциал кинетической энергии механической системы равен элементарной работе внешних и внутренних сил, действующих на систему. Теорема об изменении кинетической энергии системы (интегральная форма) dT dA dA e е i Интегрируем: i T T0 A А e A i A - работа внешних сил на конечном перемещении -работа внутренних сил на конечном перемещении Изменении кинетической энергии системы на некотором конечном перемещении равно сумме работ внешних и внутренних сил, приложенных к системе, на том же перемещении. Индивидуальное задание Теорема об изменении кинетической энергии механической системы. Постановка задачи . Механическая система под действием сил тяжести приходит в движение из состояния покоя. Начальное положение системы показано на схеме. Учитывая трение скольжения тела 1 и сопротивление качению тела 3, катящегося без скольжения определить скорость тела 1 в тот момент, когда пройденный им путь станет равным S. В задании приняты следующие обозначения: массы тел 1, 2, 3, 4 – m1,m2,m3,m4; R, r - радиусы больших и малых окружностей ; ρ- радиусы инерции тел 2, 3, 4 относительно горизонтальных осей, проходящих через их центры тяжести; fТр– коэффициент трения скольжения; δ – коэффициент трения качения. Необходимые для решения данные приведены в таблице 4. Во всех вариантах m1=10m . Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами. Наклонные участки нитей параллельны соответствующим наклонным плоскостям. Система неизменяемая. i A 0 Система начала двигаться из состояния покоя Т0 = 0 е TA (*) Пример №1 2 о 2 1 3 Vс P 3 B С п 1 T3 J2 TA Теорема об изменении кинетической энергии в интегральной форме для неизменяемой системы при T0=0 пп вр 2 J2 п m1V12 3 2 2 2 1 2 вр m3Vc 2 2 е Решение. T T T2 T пп V1 Дано: m1= m; m2= 2m m3=m; fтр=0,1 R3=2r3=0,6м ρ3= 0,4м;S1=2м ОпределитьV1 J3 2 m2 R22 2 3 T T 2 mR2 ; J 3 m3 3 0,16m. 2 2 Пример №1 2 V1 о 2 1 3 P 3 V1 Vс V1 B С Дано: m1= m; m2= 2m m3=m; fтр=0,1 R3=2r3=0,6м ρ3= 0,4м; S1=2м ОпределитьV1 Выразим все кинематические характеристики (ω2; ω3; VC )через V1 2 3 V1 R2 V1 BP п V1 r3 R3 вр T T1 T2 T3 m1V12 2 mV12 2 2 J2 2 mR2 2 V12 2 R2 2 2 V1 0,9 Vc 3CP ; V1r3 r3 R3 пп m3Vc 2 2 3 2 m V1 2 9 J3 2 2 2 0 ,16 m V1 2 0 ,81 1,16mV 2 1 V31 е TA T= 1,16mV12 Yo o N3 Xo 2 S1 P С Fтр 1 3 Sс N1 G2 α B A( e ) AG1 AFтр AG3 Vc ; V1 3 Sc S1 3 G3 S1 G1 Дано: m1= m; m2= 2m m3= m; fтр=0,1 R3=2r3=0,6м ρ3= 0,4м α=300; S1= 2м ОпределитьV 1 AG1 m1 gS1 sin 9,8m AFтр Fтр S1 fТр NS1 fТр mgS1 cos 1,7m AG3 m3 gSc mg S31 6,5m A(e) m(9,8 1,7 6,5) 1,6m 1,16mV 1,6m 2 1 V1 1,2 мс Пример2. Система тел движется под действием сил тяжести. Масса тела 1 m1=6m; масса ролика m2=2m, масса однородного катка m3=4m. Радиус R2=2r2=0,4м. Каток 3 катиться по неподвижной поверхности без проскальзывания. R3=0,6м. Радиус инерции ролика ρ= 0,4м. Коэффициент трения качения катка δ=2см. Система начала двигаться из состояния покоя. Определить скорость V1 при S1=2м. B3 3 B2 c Vc Теорема об изменении кинетической энергии в интегральной форме для неизменяемой системы. T0=0 ω2 2 е p T T1 T2 T3 V1 m1V 21 2 J 2 m2 2 0,32m; J 3 TA 1 m3 R3 2 2 J2 2 2 2 0,72m; 2 Vr ; VB VB 2 R2 VrR 2V1 ; 1 3 1 2 2 3 VB3 VB B3 P 2 3 2 R3 2V1 2 R3 2 V1 R3 Vc 3CP 3 R3 V1 ; m3Vc 2 2 J3 2 (*) 3 2 Выразим все нужные кинематические характеристики через V1, которую надо найти. T T1 T2 T3 10mV A(e) AG1 AM k m1 gS M k 3 N φ3 Mk 3 M k N m3 g 0,8m 2 c Fсц 2 1 S 3 CP c Vс G2 р G3 SC R3 ; VC V1 интегрируем 1 S SC S1 S ; 3 S R3 G1 A(e) AG1 AM k m1 gS M k 3 119,7m Работа остальных сил равна 0 Подставляем все в (*) 10mV21=119,7m; V1=3,46м/с