Учебник "
реклама

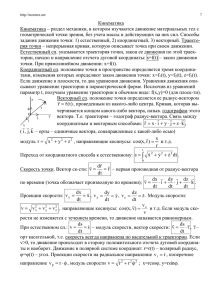
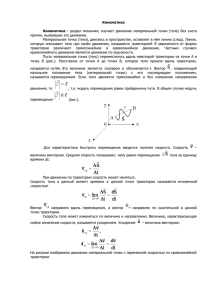
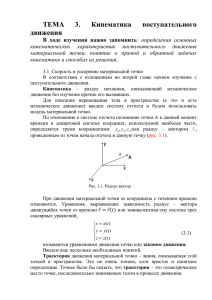
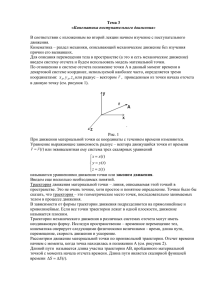
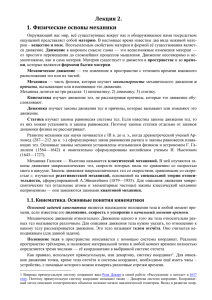
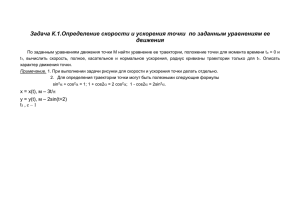
42 Раздел второй КИНЕМАТИКА Глава 5. КИНЕМАТИКА ТОЧКИ §22. Введение в кинематику Кинематикой называется раздел механики, в котором изучается механическое движение, рассматриваемое без учета сил, приложенных к движущимся объектам (точке, твердому телу, сплошной среде). В кинематике рассматривают такие характеристики движения, как скорость и ускорение точки, угловые скорость и ускорение твердого тела и др. Движение материального объекта рассматривается относительно какого-либо твердого тела – тела отсчета. С телом отсчета скрепляют систему осей координат, например декартовых, образующую вместе с телом систему отсчета. Движение тел совершается в пространстве с течением времени. Пространство в механике рассматривают как трехмерное евклидово пространство. За единицу длины принимается 1 м. Время в механике считается универсальным, т.е. протекающим одинаково во всех рассматриваемых системах отсчета. За единицу времени принимается 1 с. Время является скалярной величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Расстояние, скорость и ускорение рассматриваются как функции времени. Отсчет времени ведется от некоторого начального момента (t = 0). Основная задача кинематики точки и твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение. §23. Способы задания движения точки Движение точки задано, если известно ее положение относительно системы отсчета в любой момент времени. Существуют координатный и естественный способы задания движения точки. векторный, 43 1. Векторный способ задания движения точки. Пусть точка М движется по отношению к некоторой системе отсчета Оxyz. Положение подвижной точки М в любой момент времени можно определить при помощи радиуса-вектора r , проведенного из начала координат О в точку М (рис. 43). При движении точки М вектор r будет с течением времени t изменяться и по модулю, и по направлению. Следовательно, r является функцией, зависящей от аргумента t: r rt . (1) Это однозначная функция, потому что точка М в каждое мгновение находится в каком-либо одном месте. Равенство (1) и определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить вектор r и найти положение движущейся точки. Рис. 43 При движении точки М ее радиус-вектор r изменяется, причем начало его находится в одной неподвижной точке, а конец М скользит по траектории. Линия, описываемая концом переменного вектора, выраженного функцией времени и выходящего из одной точки, называется годографом этого вектора. Следовательно, траектория точки является годографом ее радиус-вектора r . 2. Координатный способ задания движения точки. Положение точки можно определять декартовыми координатами x, y, z, которые с течением времени будут изменяться. Чтобы знать закон движения точки, надо знать 44 значения координат точки для каждого момента времени, т.е. знать зависимости x = f1 (t) , y = f2 (t) , z = f3 (t) . (2) Это уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Если движение точки происходит в одной плоскости, то, приняв эту плоскость за плоскость Оxy, получим два уравнения движения: x = f1 (t) , y = f2 (t) . (3) При прямолинейном движении точки, если вдоль ее траектории направить ось Оx, движение будет определяться одним уравнением x = f1 (t) . (4) Исключив из этих уравнений время (t), получим уравнение траектории. Пример. Пусть движение точки в плоскости Оxy дано уравнениями x = 2t, y = 12t2 , (а) где x, y выражены в сантиметрах; t – в секундах. По этим уравнениям можно найти, что в момент времени t = 0 точка находится в положении М0(0,0) т.е. в начале координат, в момент t1 = 1 с – в положении М1(2,12) и т.д. Таким образом, уравнения (а) действительно определяют положение точки в любой момент времени. Таким образом, уравнения (а) действительно определяют положение точки в любой момент времени. Давая t разные значения и изображая соответствующие положения точки на рисунке, можем построить ее траекторию. Другим путем траекторию можно найти, исключив t из уравнений (а). Из первого уравнения находим t = x/2 и, подставляя это значение t во второе уравнение, получаем y = 3x2. Следовательно, траекторией точки является парабола с вершиной в начале координат и осью, параллельной оси Оy. 3. Естественный способ задания движения точки. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета 45 Оxyz (рис. 44). Выберем на траектории неподвижную точку О/, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления. Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О/ до точки М, взятому с соответствующим знаком. Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s = f (t). (5) Уравнение (5) и выражает закон движения точки М вдоль траектории. Рис. 44 Таким образом, чтобы задать движение точки естественным способом, надо задать: 1) траекторию точки; 2) начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета; 3) закон движения точки вдоль траектории в виде s = f (t). Заметим, что величина s в уравнении (5) определяет положение движущейся точки, а не пройденный ею путь. §24. Вектор скорости точки Одной из кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Введем сначала понятие средней скорости. Пусть точка находится в момент времени t в положении М, определяемом радиусом-вектором r , а в момент t1 приходит в положение M1, 46 определяемое вектором r1 . Тогда перемещением точки за промежуток времени Δt = t1 – t называют вектор MM 1 , проведенный из положения, занимаемого точкой в начале этого промежутка, в положение, занимаемое в конце его. Этот вектор направлен по хорде, если точка движется криволинейно (рис. 45, а), и вдоль самой траектории АВ, когда движение является прямолинейным (рис. 45, б). Рис. 45 Из треугольника ОММ1 видно, что r MM1 r1 ; следовательно, MM1 r1 r r . Отношение вектора перемещения точки к промежутку времени Δt определяет среднюю по модулю и направлению скорость точки за промежуток времени Δt: V ср r . t (6) Направлен вектор V ср при криволинейном движении вдоль хорды MM1, в сторону движения точки, а при прямолинейном движении – вдоль самой траектории. Чтобы получить точную характеристику движения, вводят понятие о скорости точки в данный момент времени. 47 Скоростью точки в данный момент времени t называется векторная величина V , к которой стремится средняя скорость V ср при стремлении промежутка времени Δt к нулю: r dr . t 0 t dt V lim (7) Вектор скорости точки V в данный момент времени равен первой производной от радиуса вектора точки по времени. Вектор скорости точки V направлен по касательной к траектории точки в сторону движения. При прямолинейном движении вектор скорости V направлен вдоль прямой, по которой движется точка и может изменяться лишь численно; при криволинейном движении кроме числового значения изменяется и направление вектора скорости точки. Размерность скорости L / T, т.е. длина/время; в качестве единиц измерения применяют м/с или км/ч. § 25. Вектор ускорения точки Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Пусть в момент времени t точка находится в положении М и имеет скорость V , а в момент t1 приходит в положение М1 и имеет скорость V1 (рис. 46). Тогда за промежуток времени Δt = t1 – t скорость точки получает приращение V V1 V . Для построения вектора V отложим от точки М вектор, равный V1 , и построим параллелограмм, в котором диагональю будет V1 , а одной из сторон V . Тогда вторая сторона будет изображать вектор V . Заметим, что вектор V всегда направлен в сторону вогнутости траектории. Отношение приращения вектора скорости V к промежутку времени Δt определяет вектор среднего ускорения точки за этот промежуток времени: a ср V . t (8) 48 Вектор a ср имеет тоже направление, что и вектор V . Ускорением точки в данный момент времени t называется векторная величина a , к которой стремится среднее ускорение a ср при стремлении промежутка времени Δt к нулю: V dV d 2 r a lim . t 0 t dt dt 2 (9) Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени. Размерность ускорения L / T2, т.е. длина/(время)2; в качестве единицы измерения применяется м/с2. При прямолинейном движении вектор a направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор a , так же как и вектор a ср , лежит в плоскости кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор a ср направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке М1 (рис. 46). В пределе, когда точка М1 стремится к М, эта плоскость занимает положение так называемой соприкасающейся плоскости. Для плоской кривой соприкасающаяся плоскость совпадает с плоскостью этой кривой. Следовательно, в общем случае вектор a лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой. Рис. 46 49 §26. Определение скорости и ускорения точки при координатном способе задания движения 1. Определение скорости точки Разложим радиус-вектор и скорость точки на составляющие, параллельные осям координат (рис. 47). Получим: r xi y j z k ; V Vx i Vy j Vz k , (10) где x,y,z – координаты точки М; i, j, k – единичные векторы осей координат; Vx, Vy, Vz – проекции скорости на оси координат. Рис. 47 Учитывая (10), согласно определению скорости имеем: V r d x i y j z k x i y j z k , t dt (11) так как i, j, k не изменяются при движении точки М. Точки над x, y, z – означают их производные по времени. Сравнивая (10) и (11), получаем для проекций скорости на декартовые оси координат следующие формулы: Vx dx dy dz x , Vy y , Vz z . dt dt dt (12) Проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени. 50 Модули и направление скорости найдутся из формул: V= Vx 2 Vy 2 Vz 2 , cosα=Vx/V, cosβ=Vy/V, cosγ=Vz/V, (13) где α, β, γ – углы, образуемые вектором скорости с координатными осями. 2. Определение ускорения точки. Разложим ускорение точки на составляющие, параллельные осям декартовой системы координат. Получим: a ax i a y j az k , (14) где aх, aу, az – проекции ускорения на координатные оси. Согласно определению ускорения и формулам (10) и (11), имеем: a dV V d dV dV Vx i Vy j Vz k x i y j z k xi y j zk . t dt dt dt dt (15) Сравнивая (14) и (15), получаем формулы для проекций ускорения на оси декартовой системы координат: aх dVy dVx dV y , az z z . x , ay dt dt dt (16) Проекции ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул: a a x2 a 2y a z2 ; cosα1 = a x a , cosβ1 = a y a , cosγ1 = a z a , (17) где α1, β1, γ1 – углы, образуемые вектором ускорения с координатными осями. В случае прямолинейного движения, которое задается одним уравнением x = f (t), будет: Vx = dx / dt, ax=dVx / dt= d 2 x / dt 2 . (18) Равенства (18) и определяют значения скорости и ускорения точки в этом случае. 51 Задача 7. Движение точки задано уравнениями (x, y – в метрах, t – в секундах): x = 8t – 4 t 2 , y = 6t – 3 t 2 . Определить траекторию, скорость и ускорение точки. Решение. Для определения траектории исключим из уравнений движения время t. Умножая обе части первого уравнения на 3, а обе части второго – на 4 и почленно вычитая из первого равенства второе, получим: _3x = 24t – 12t2 4y = 24t – 12t2 3x – 4y = 0 или y = 3 x. 4 Следовательно, траектория – прямая линия, наклоненная к оси Ох под углом α, где tg α = 3/4 (Рис. 48). Рис. 48 Определяем скорость точки. По формулам (12) и (13) получаем: Vx x 81 t , Vy y 61 t , V= Vx2 Vy2 = 64(1 t ) 2 36(1 t ) 2 = 101 t . Теперь находим ускорение точки, формулы (16) и (17) дают: ax = x 8 м/с 2 , ay = y 6 м/с 2 , a = 10 м/с 2 . Направлены векторы V и a вдоль прямой АВ. Проекции ускорения на координатные оси все время отрицательные, следовательно, ускорение имеет постоянное направление от B к A. Проекции скорости при 0 < t < 1 положительны, следовательно, в течении этого промежутка времени скорость 52 точки напрвлена от О к В. При этом в момент времени t = 0, V = 10 м/c; в момент t = 1 c, V = 0. В последующие моменты времени (t > 1 c) обе проекции скорости отрицательные, следовательно, скорость направлена от В к А, т.е. также как и ускорение. Задача 8. Определить траекторию, скорость и ускорение середины М шатуна кривошипо-ползунного механизма (рис.49), если ОА=АВ=2b, а угол φ при вращении кривошипа растет пропорционально времени φ = ωt. Решение. Определим уравнения движения точки М. Проводя оси и обозначая координаты точки М через x и у находим: x = 2b cosφ + b cosφ, y = bsinφ. Заменяя φ его значением, получаем уравнения движения точки М: x = 3b cosωt, y = b sinωt. Для определения траектории точки М представим уравнения движения в виде: x/3b = cosωt, y / b=sinωt; Возведя эти равенства почленно в квадрат и сложив, получим: x 2 y2 1. 9b2 b2 Итак, траектория точки М – эллипс с полуосями 3b и b. Теперь по формулам (12) и (13) находим скорость точки М: Vx x 3b sin t , Vy y b cos t ; V=bω 9 sin 2 t cos 2 t . Скорость оказывается величиной переменной, меняющейся с течением времени в пределах: а) ωt=0 Vmin = bω , б) ωt = π/2 Vmax = 3bω . Далее по формуле (16) определяем проекции ускорения точки М: aх = – 3bω 2 cosωt = – ω 2 x, ay = – bω 2 sinωt = – ω 2 y; 53 отсюда, a = 4 ( x 2 y 2 ) = ω2 r, где r – длина радиус-вектора, проведенного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстоянию от центра эллипсиса. Для определения направления a имеем формулы (17): cosα1 = ax = x r, a cosβ1 = ay a = y r; Ускорение точки М все время направлено вдоль МО к центру эллипса. Рис. 49 §27. Оси естественного трехгранника. Числовое значение скорости. При естественном способе задания движения значения векторов V и a определяют по их проекциям на подвижные оси Мτnb, имеющие начало в точке М и движущиеся вместе с нею (рис. 50). Эти оси, называемые осями естественного трехгранника, направлены следующим образом: ось Мτ – по касательной к траектории в сторону положительного отсчета расстояния S; ось Mn – по нормали к траектории, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось Mb – перпендикулярно к первым двум так, чтобы она образовала с ними правую систему осей. Нормаль Mn называется главной нормалью, а перпендикулярная ей нормаль Mb – бинормалью. Скорость точки, направленная по касательной к траектории (рис. 50), определяется в осях Mτnb одной проекцией Vτ на ось Mτ. При этом Vτ = V или Vτ = –V, следовательно, Vτ или совпадает с модулем скорости V, или отличается от V только знаком. Условимся обозначать Vτ тоже символом V, 54 опуская индекс τ, и называть числовым или алгебраическим значением скорости. Модуль скорости будем тоже обозначать символом V, а когда надо подчеркнуть, что речь идет о модуле – применять символ |V|. Рис. 50 Найдем значение V. Если за промежуток ∆t точка совершит перемещение ММ1 = ∆s (см. рис. 44), то средней скоростью точки будет Vср = ∆s/∆t и в пределе найдем, что s t 0 t V lim или V ds s . dt (19) Таким образом, числовое значение скорости точки в данный момент времени равно первой производной от расстояния s этой точки по времени. Так как всегда dt > 0, то знак V совпадает со знаком ds. Следовательно, когда V > 0, скорость направлена в сторону положительного отсчета расстояния, а когда V < 0 – в противоположную сторону. Таким образом, величина V одновременно определяет и модуль скорости, и сторону, куда она направлена. §28. Касательное и нормальное ускорение точки В §25 было показано, что ускорение a точки лежит в соприкасающейся плоскости, т.е. в плоскости Мτn. Следовательно, проекция вектора a на бинормаль Мb равна нулю (ab = 0). Найдем проекции a на оси Мτ и Mn. 55 Проецируя обе части равенства (9) на оси Мτ и Mn и обозначая символами (d V )τ и (d V )n проекции вектора d V на эти оси, получим: a dV dt , a n d V n dt . (20) Вектор d V представляет собой разность между скоростями в двух | соседних точках М и М/ (рис. 51, а), т.е. d V V V . Отложим векторы | V MA и V M|A от общего начала (рис. 51, б), тогда dV AB . Фигуру ACBD при бесконечно малом угле dφ можно рассматривать как прямоугольник, отсюда: (d V )τ = AC = DB = MB – MA = V| – V = dV. Рассматриваем AD как элементарную дугу радиуса МА. Тогда: (d V )n = AD = MA∙d = V∙d. Подставляя найденные значения (d V )τ и (d V )n в равенства (20) получим: aτ = dV/dt, an = V∙dφ/dt . (21) Угол межу касательными к кривой в двух ее точках называется углом смежности; тогда dφ – элементарный угол смежности. Напомним, что отношение dφ к ds равно M M | , определяет кривизну кривой в точке М, а кривизна k является величиной, обратной радиусу кривизны ρ в этой точке: dφ/ds = k = 1/ρ . (22) Введем эту величину во второе из равенств (21) и преобразуем его, учтя еще равенство (19) к виду: d ds 1 V2 an V V V ds dt . В результате окончательно получим: dV d 2s a , dt dt 2 V2 an , ab = 0. (23) 56 Рис. 51 Таким образом, мы доказали, что проекция ускорения точки на касательную равна первой производной от числового значения скорости или второй производной от расстояния s по времени, а проекция ускорения на главную нормаль равна квадрату скорости, деленному на радиус кривизны траектории в данной точке кривой, проекция ускорения на бинормаль равна нулю. Величины aτ и an называются касательным и нормальным ускорениями точки. Отложим вдоль касательной Мτ и главной нормали Mn векторы a и a n , т.е. касательную и нормальную составляющие ускорения (рис. 52). При этом составляющая a n будет всегда направлена в сторону вогнутости кривой, так как всегда an > 0, а составляющая a может быть направлена или в положительном, или в отрицательном направлении оси Мτ в зависимости от знака проекции aτ (см. рис. 52, а, б). Рис. 52 57 Вектор ускорения точки a изображается диагональю параллелограмма, построенного на составляющих a и a n . Так как эти составляющие взаимно перпендикулярны, то модуль вектора a и угол μ его отклонения от нормали Mn определяются формулами: a a 2 2 2 dV V , dt an2 tg a , an (24) где – π/2 μ π/2, при μ > 0 вектор a отклонен от нормали Mn в сторону оси Mμ (рис. 52, а), а при μ < 0 – в противоположную сторону (рис. 52, б). § 29. Частные случаи движения точки 1. Прямолинейное движение ( ). В этом случае an a a dV . dt 2. Равномерное a V2 0 и (25) криволинейное движение (V = const). V2 dV . 0 и a an dt В этом случае (26) Найдем закон этого движения точки. Так как V ds , то ds V dt . dt Проинтегрируем обе части равенства, учитывая при этом, что при t = 0, s s 0 , получим s t ds V dt s0 s s 0 Vt . или 0 Если в равенстве (27) s 0 0 , то s = Vt, V s t . (27/) 3. Равномерное прямолинейное движение, в этом случае an a 0 и a 0. 4. Равнопеременное криволинейное движение ( a const ). (27) 58 Найдем закон этого движения, считая, что при t = 0, s s 0 , V V0 , где V0 -начальная скорость точки. Согласно первой из формул (23) dV a dt . Интегрируя обе части этого равенства, получим : V t dV a dt V0 или V V0 at . (28) 0 Формулу (28) представим в ds V0 at dt виде или ds V0 dt a t dt . Вторично интегрируя, найдем закон этого движения точки: S t t a t 2 d s V0 dt a tdt или s s0 V0t 2 S 0 0 (29) 0 Формулы (27) – (29) определяют так же законы равномерного или равнопеременного прямолинейного движения точки, если считать s = x. При этом в равенствах (28) и (29) a a , где a – числовое значение ускорения данной точки (см. формулу (25)). § 30. Гармонические колебания точки Рассмотрим прямолинейное движение точки, при котором ее расстояние x от начала координат О изменяется со временем по закону x =Acos kt, (30) где A и k – постоянные величины. Точка М (рис. 53) совершает при этом движении колебания между положением M 0 ( A ) и M1 ( A ) . Колебания, происходящие по закону (30), называются простыми гармоническими колебаниями. Величина А, равная наибольшему отклонению точки от центра колебаний О, называется амплитудой колебаний. Начиная движение в момент t = 0 из положения M 0 , точка вновь придет в это положение в момент времени t 1 , для которого cos k t 1 = 1, т.е. kt 1 2 . 59 Рис. 53 Промежуток времени T = t 1 = 2 , в течение которого точка совершает k одно полное колебание, называется периодом колебаний. Вычисляя производные от х по t, найдем значения скорости и ускорения точки: V Vx Ak sin kt , a ax Ak 2 cos kt . (31) Следовательно, в этом движении и скорость, и ускорение точки изменяются с течением времени по гармоническому закону. Аналогичные колебания происходят и при законе x A sin kt , только движение в этом случае начинается из центра О. Гармонические колебания по закону s A coskt (или s A sin kt ) точка может совершать, двигаясь вдоль кривой. Все сказанное о характере движения при этом сохранится с той лишь разницей, что последняя из формул (31) будет определять касательное ускорение точки; кроме него точка будет еще иметь V2 нормальное ускорение an . §31. Графики движения, скорости и ускорения точки Если в масштабах откладывать вдоль оси абсцисс время t, а вдоль оси ординат – расстояние s, то построенная в этих осях кривая s f ( t ) будет изображать график расстояний, или график движения точки. Аналогично, в масштабах могут быть построены кривые, дающие зависимость V(t) – график скорости и a (t ) , an (t ) , a(t ) – график касательного, нормального, полного ускорений. На рис. 54, а, б, в сверху показаны графики движений, определяемых соответственно уравнениями (27), (29), (30). 60 Рис. 54 Ниже на тех же рисунках изображены для этих движений графики скоростей и графики касательных ускорений. График равномерного движения изображается прямой линией, график скорости – прямой, параллельной оси абсцисс (V = const), а график касательного ускорения – прямой, совпадающей с осью абсцисс ( a 0 ). Для равнопеременного движения (на рис. 54, б случае – ускоренного движения) график движения изображается ветвью параболы, график скорости – прямой, а график касательного ускорения – прямой, параллельной оси абсцисс ( a const ). Для гармонических колебаний (рис. 54, в) графики изображаются косинусоидами или синусоидами. Графики нормального и полного ускорений на рис. 54 не показаны, так как an и a кроме закона движения, зависят еще и от , т.е. от вида траектории, и при одном и том же законе s f ( t ) будут для разных траекторий разными. Глава 6. ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА §32. Поступательное движение Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению. 61 Свойства этого движения определяются теоремой: при поступательном движении все точки тела описывают одинаковые траектории и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения. Для доказательства возьмем две произвольные точки А и В тела, совершающего поступательное движение (рис. 55). Тогда r B r A AB . (32) При этом длина АВ постоянна, а направление AB остается неизменным ( AB = const). Вследствие этого, как видно из равенства (32), траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор AB . Следовательно, траектории точек А и В будут одинаковыми кривыми. Рис. 55 Продифференцируем обе части равенства (32) по времени, получим: d r B d r A d AB . Но dt dt dt d AB 0. dt В результате находим, что: VA VB . Продифференцируем обе части этого равенства по времени, найдем: dVA dVB dt dt или Таким образом, теорема доказана. a A aB . 62 Из теоремы следует, что поступательное движение тела определяется движением какой-нибудь его точки. §33. Вращательное движение твердого тела вокруг оси. Угловая скорость и угловое ускорение При вращении твердого тела вокруг неподвижной оси точки, лежащие на оси, неподвижны, остальные точки описывают окружности с центром на оси вращения, а плоскости окружностей перпендикулярны оси вращения. Пусть I – неподвижная полуплоскость, проведенная через ось Az, II – подвижная полуплоскость жестко связанная с телом и проходящая через ось Az (рис. 56). Тогда положение тела однозначно определится углом поворота тела , который считается положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (если смотреть с положительного конца оси Az), и отрицательным, если по ходу часовой стрелки. Чтобы знать положение тела, надо знать зависимость угла от времени t, т.е.: f (t) . (33) Уравнение (33) выражает закон вращательного движения твердого тела вокруг неподвижной оси. Рис. 56 63 Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость и угловое ускорение . Угловая скорость характеризует быстроту изменения с течением времени угла поворота. Если за промежуток времени t t1 t тело совершает поворот на угол 1 , то численно средней угловой скоростью тела будет cp . t В пределе при t 0 найдем, что d . dt (34) Таким образом, числовое значение угловой скорости тела в заданный момент времени равного первой производной от угла поворота по времени. В качестве единицы измерения угловой скорости применяют рад/с или 1/с. Угловую скорость тела можно изобразить в виде вектора , который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис. 57). Рис. 57 Угловое ускорение характеризует быстроту изменения с течением времени угловой скорости. Если за промежуток времени t t1 t угловая скорость тела изменяется на величину 1 , то числовое значение среднего углового ускорения тела будет ср что . В пределе при Δt0 найдем, t 64 d d 2 . или dt dt 2 (35) В качестве единицы измерения углового ускорения применяют рад/с2 или 1/с2. Угловое ускорение тела можно изобразить в виде вектора , направленного вдоль оси вращения. При этом d . dt (35/) Если возрастает, то и d направлено в сторону , значит и направлен в ту же сторону (рис 57, а). Если убывает, то d направлен противоположно и направлен противоположно вектору (рис 57, б). §34. Равномерное и равнопеременное вращения твердого тела Если угловая скорость тела остается во время движении постоянной ( const), то вращение тела называется равномерным. Найдем закон равномерного вращения. Из формулы (34) имеем d dt . Проинтегрируем обе части равенства, учитывая при этом, что при t = 0, 0 , получим : t 0 0 d dt 0 t или (36) Из равенства (36) следует, что при равномерном вращении, когда 0 0 , t и t (37) В технике скорость равномерного вращения определяют числом n оборотов в минуту. Найдем зависимость между n об/мин и 1/с. При одном обороте тело повернется на угол 2 , а при n оборотах на 2n ; этот поворот делается за время t = 1 мин = 60 с. Тогда n 0,1n . 30 (38) Если угловое ускорение вращающегося тела остается постоянным ( const ), то вращение называется равнопеременным. Найдем закон равнопеременного вращения. Из формулы (35) 65 d dt . имеем Проинтегрируем обе части равенства, учитывая, что при t = 0, 0 , получим: t d dt 0 или 0 t (39) 0 Представим выражение (39) в виде d 0 t или d 0 dt tdt . dt Вторично интегрируя, найдем t t d 0 dt tdt 0 0 или 0 0 t t 2 2 . (40) 0 Уравнение (40) выражает закон равнопеременного вращения. §35. Скорости и ускорения точек вращающегося тела 1. Скорости точек тела. При вращении тела точка М описывает окружность радиуса h (см. рис. 56) Если за время dt происходит поворот тела на угол d , то точка М при этом совершает элементарное перемещение ds hd . Тогда числовое значение скорости точки будет равно отношению ds к dt, т.е. V ds d или V h . h dt dt (41) Таким образом, числовое значение скорости точки вращающегося тела равно произведению угловой скорости тела на расстояние от этой точки до оси вращения. Направлена скорость по касательной к описываемой точкой окружности. 2. Ускорения точек тела. Для нахождения ускорения точки М воспользуемся формулами a = dV/dt , an = V2/. В нашем случае h . Подставляя значение V из равенства (41) в выражения a и an , получим d a = h , dt h 2 2 an или окончательно h a h , an h2 . (42) Касательная составляющая ускорения a направлена по касательной к траектории (в сторону движения при ускоренном вращении тела и в обратную 66 сторону при замедленном); нормальная составляющая a n всегда направлена по радиусу MC к оси вращения (рис. 58). Полное ускорение точки будет a a2 an2 или a h 2 4 . (43) Рис. 58 Отклонение вектора полного ускорения от радиуса MC определяется углом , который вычисляется по формуле tg = a /an . Поставляя сюда значения a и a n из равенств (42), получаем tg . 2 (44) 3. Векторы скорости и ускорения точек тела. Чтобы найти выражения для V и a , проведем из произвольной точки О оси АВ радиус-вектор r точки М (рис. 59). Рис. 59 67 Тогда h r sin и по формуле (41) V h r sin или V r . Таким образом, модуль векторного произведения r равен модулю скорости точки М. Направление векторов r и V тоже совпадает и размерности их одинаковы. Следовательно V r. (45) Формулу (45) называют формулой Эйлера. Беря от обеих частей последнего равенства производные по времени, получим d V d dr r dt dt dt или a r V . (46) Вектор r направлен, как и вектор r , т.е. по касательной к траектории точки М, а r r sin h . Вектор V направлен вдоль МС, а V V sin 900 2 h , т.к. V = h. Учитывая эти результаты, а также формулы (42), заключаем, что r a и r an . Глава 7. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА §36. Уравнения плоскопараллельного движения. Разложение движения на поступательное и вращательное Плоскопараллельным (или плоским) движением называется такое движение твердого тела, при котором все его точки перемещаются параллельно некоторой фиксированной плоскости П (рис. 60) Например, движение книги на плоскости стола. Рассмотрим сечение S тела плоскостью Oxy, параллельной плоскости П (рис. 60). Все точки тела, лежащие на прямой MM/, перпендикулярной сечению 68 S, т.е. плоскости П, движутся тождественно. Поэтому для изучения движения тела достаточно изучить, как движется в плоскости Oxy сечение S. Положение фигуры S в плоскости Oxy определяется положением отрезка AB, проведенного на этой фигуре (рис. 61). Положение отрезка АВ определяется координатами xA, yA точки А, называемой полюсом, и углом , который отрезок АВ образует с осью x. При движении фигуры S величины xA, yA и будут изменяться со временем, т.е. x A f1 ( t ), y A f 2 ( t ), f3 ( t ) (47) Уравнения (47) являются уравнениями плоскопараллельного движения твердого тела. Рис. 60 Рис. 61 Движение плоской фигуры может рассматриваться как слагающееся из поступательного движения при const , при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг полюса при x A const , y A const . При изучении движения можно в качестве полюса выбирать другую точку фигуры. Выберем в качестве полюса точку С и будем определять положение фигуры отрезком СD, образующим с осью ох угол 1 (рис. 62). Характеристики поступательной части движения изменяется и в общем случае V C V A и a С a A (иначе движение фигуры было бы поступательным). Характеристики вращательной части движения, т.е. и , остаются неизменными. В самом 69 деле, проведя из С прямую CB1 , параллельную AB, мы видим, что 1 , 1 или 1 , 1 . где const . Отсюда 1 , Следовательно, вращательная часть движения от выбора полюса не зависит. Рис. 62 §37. Определение скоростей точек плоской фигуры Теорема. Скорость любой точки М плоскости фигуры геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости, которую точка М получает при вращении фигуры вокруг этого полюса. В самом деле, положение точки М определяется по отношению к осям / Oxy радиусом-вектором r r A r (рис. 63), где r A – радиус вектор полюса А, / r AM – вектор, определяющий положение точки М относительно осей Ax /y/, перемещающихся вместе с полюсом А поступательно. Тогда / dr dr A dr VM . dt dt dt / dr dr A V A ; величина, Здесь равна скорости V M A , которую точка М dt dt получает при r A const , т.е. относительно осей Ax/y/, или, при вращении фигуры вокруг полюса А. В результате имеем где VM VA VMA , (48) V M A MA ( V M A MA ), (49) 70 – угловая скорость фигуры. Таким образом, теорема доказана. Модуль и направление скорости VM находятся построением соответствующего параллелограмма (рис. 64). Рис.63 Рис. 64 §38. Теорема о проекциях скоростей двух точек тела Теорема. Проекции скоростей двух точек тела на ось, проходящую через эти точки, равны друг другу. Рассмотрим две точки А и В плоской фигуры. Принимая точку А за полюс (рис. 65), получаем по формуле (48) что V B V A V BA . Отсюда, проецируя обе части равенства на ось, направленную по АВ, и учитывая, что вектор V BA перпендикулярен АВ, находим: VB cos VA cos , (50) и теорема доказана. Рис. 65 71 §39. Определение скоростей точек плоскости фигуры с помощью мгновенного центра скоростей Мгновенным центром скоростей (МЦС) называется точка плоской фигуры, скорость которой в данный момент времени равно нулю. Пусть в момент времени t точки А и В плоской фигуры имеют скорости V A и V B , не параллельные друг другу (рис. 66). Тогда точка Р, лежащая на пересечении перпендикуляров Аа к вектору V A и Вb к вектору V B и будет МЦС, т.к. V P =0. В самом деле, если допустить, что V P 0, то по теореме о проекциях скоростей вектор V P должен быть одновременно перпендикулярен и АР (так как V A АР) и ВР (так как V B ВР), что невозможно. Если в момент времени t взять точку Р за полюс, то по формуле (48) скорость точки А будет: V A = V P + V PA = V PA , так как V P = 0. Следовательно, скорости точек плоской фигуры определяются так, как если бы движение фигуры было вращением вокруг МЦС. При этом, согласно соотношением (49): VA = PA (V A PA) , VB PB (VB PB) , VB . PB (51) Из равенства (51) следует, что VA VB , PA PB (52) т.е., что скорости точек плоскостей фигуры пропорциональны их расстоянием от МЦС. Рис. 66 72 Рассмотрим частные случаи определения МЦС. а) Если плоскость движения осуществляется путем качения без скольжения одного цилиндрического тела по поверхности другого неподвижного, то точка Р катящегося тела (рис. 67) является МЦС. Примером служит качение колеса по рельсу. б) Если скорости точек А и В плоской фигуры параллельны друг другу, причем линия АВ не перпендикулярна V A (рис. 68, а), то МЦС лежит в бесконечности и скорости всех точек параллельны V A . При этом из теоремы о проекциях скоростей следует, что VA cos VB cos , то есть VB = VA . Угловая скорость тела в этот момент времени равна нулю. в) Если скорости точек А и В плоской фигуры параллельны друг другу и при этом линия АВ перпендикулярна V A , то МЦС определяется построением, показанным на рис. 68, б. Справедливость построений следует из пропорции (52). г) Если известны вектор скорости V B точки В фигуры и ее угловая скорость , то МЦС можно найти из последнего выражения равенства (51), которое дает РВ = VB . Рис. 67 Рис. 68 Задача 9. Определить скорость точки М обода катящегося колеса с помощью МЦС. 73 Решение. Точка касания колеса Р (рис. 69) является МЦС, поскольку V P = 0. Следовательно, V M PM . Так как прямой вписанный угол РМD опирается на диаметр, то направление вектора скорости V M любой точки обода, проходит через точку D. Составляя пропорцию VM VC и замечая, PM PC чтоPC = R, а РМ=2Rcos, находим VM 2VC cos . Угловая скорость колеса имеет значение VC VC . PC R Задача 10. Определить скорость центра С подвижного блока радиуса r и его угловую скорость (рис. 70), если груз А поднимается со скоростью V A , а груз В поднимается со скоростью V B . Рис. 69 Рис. 70 Решение. Скорости точек а и b блока равны по модулю скоростям грузов (нить не проскальзывает), то есть Va = VA и Vb = VB . Зная скорости точек а и b и пологая для определенности VB > VA , находим положение мгновенного центра скоростей Р подвижного блока таким же приемом как и в случае, показанном на рис. 68, б. Скорость центра С блока изображается вектором V С . Для определения модуля VC и угловой скорости подвижного блока используем формулы (51), (52), которые для данного случая запишем в виде: 74 Vb Va V , b Pb Pa Pb Преобразуем первое равенство: Vb ∙Pa = Va∙Pb или Pa найдем Vb Pb V 2r Pa , а так как Pb 2r Pa, то b . Отсюда Va Pa Va Pa 2Va r , Vb Va VC Pс (r Pa) Pb 2Vb r . Vb Va Тогда VB VA , 2r VB VA . При VB VA центр С блока поднимается; 2 если VB VA , он будет опускаться. При VB VA получим VC = 0. Глава 8. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ §40. Относительное, переносное и абсолютное движения При решении задач механики в ряде случаев оказывается целесообразным рассматривать движение точки (или тела) одновременно по отношению к двум системам отсчета, из которых одна считается основной или условно неподвижной, а другая определенным образом движется по отношению к первой. Движение, совершаемое при этом точкой (или телом) называют составным или сложным. Например, шар, катящийся по палубе движущегося парохода, можно считать совершающим по отношению к берегу сложное движение, состоящее из качения по отношению к палубе (подвижная система отсчета), и движение вместе с палубой парохода по отношению к берегу (неподвижная система отсчета). Таким путем сложное движение шара разлагается на два более простых и более легко исследуемых. Рассмотрим точку М, движущуюся по отношению к подвижной системе отсчета Оxyz, которая в свою очередь как-то движется относительно другой системы отсчета О1x1y1z1, которую называют основной или условно неподвижной (рис. 71). Каждая из этих систем отсчета не связана с определенным телом, на чертеже не показанным. Введем следующие определения. 75 1. Движение, совершаемое точкой М по отношению к подвижной системе отсчета (к осям Оxyz) называется относительным движением (такое движение будет видеть наблюдатель, связанный с этими осями и перемещающийся вместе с ними). Траектория АВ, описываемая точкой, в относительном движении, называется относительной траекторией. Скорость точки М по отношению к осям Оxyz называется относительной скоростью (обозначается V от ), а ускорение – относительным ускорением (обозначается a от ). Рис. 71 2. Движение, совершаемое подвижной системой отсчета Оxyz (и всеми связанными с нею точками пространства) по отношению к неподвижной системе О1x1y1z1 является для точки М переносным движением. Скорость той связанной с подвижными осями Оxyz точки m, с которой в данный момент времени совпадает движущаяся точка М, называется переносной скоростью точки М в этот момент (обозначается V пер ), а ускорение этой точки m – переносным ускорением точки М (обозначается a пер ). Таким образом Vпер Vm , a пер a m . (53) Если представить, что относительное движение тачки происходит по поверхности тела, с которым тесно связаны подвижные оси Оxyz, то переносной скоростью (или ускорением) точки М в данный момент времени 76 будет скорость (или ускорение) той точки m тела, с которой в этот момент совпадает точка М. 3. Движение, совершаемой точкой по отношению к неподвижной системе отсчета О1x1y1z1 называется абсолютным. Траектория СD этого движения – называется абсолютной траекторией, скорость – абсолютной скоростью (обозначается V аб) и ускорение – абсолютным ускорением (обозначается a аб ). В приведенном примере движении шара относительно палубы парохода будет относительным, движение парохода до отношению к берегу будет для шара переносным движением, а скорость той точки палубы, которой в данный момент времени касается шар, будет в этот момент его переносной скоростью; движение шара по отношению к берегу будет его абсолютным движением, а скорость – абсолютной скоростью шара. §41. Теорема о сложении скоростей Рассмотрим сложное движение точки М. Пусть эта точка совершает за промежуток времени t t1 t вдоль траектории АВ относительное / перемещение, определяемое вектором MM (рис. 72, а). Кривая АВ, двигаясь вместе с подвижными осями 0xyz (на рисунке не показаны), перейдет за тот же промежуток времени в новое положение А1В1. Одновременно та точка m кривой АВ, с которой в момент времени t совпадает точка М, совершит переносное перемещение mm1 Mm1 . В результате точка М придет в положение М1 и совершит за время t абсолютное перемещение MM1 . Из векторного треугольника Mm1M1 имеем MM1 Mm1 m1M1 . Деля обе части равенства на t и переходя к пределу, получим lim MM1 t lim Mm1 t + lim m1M1 t . t 0 t 0 t 0 Но по определению lim MM1 t V аб , lim Mm1 t V пер . t 0 t 0 77 Рис. 72 Что касается последнего слагаемого, то, так как при t 0 кривая А1В1 стремится к совпадению с кривой АВ, в пределе / lim m1M1 t lim MM t V от . t 0 t 0 В результате находим, что V аб V от V пер . (54) Направлены векторы V аб , V от , V пер по касательным к траекториям (рис. 72, б). Таким образом, доказана следующая теорема о сложении скоростей: при сложном движении абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей. Построенная на рис. 72, б фигура называется параллелограммом скоростей. Если угол между векторами V от и V пер равен , то по модулю 2 2Voт Vпер cos . Vаб Voт2 Vпер (55) Рассмотрим пример решения задачи. Задача 11. Точка М движется вдоль прямой ОА со скоростью u (рис. 73), а сама прямая вращается в плоскости Оx1y1 вокруг центра О с угловой скоростью . Определить скорость точки М относительно осей Оx1y1 в зависимости от расстояния ОМ = r. 78 Решение. Скорость u , направленная вдоль ОА, будет относительной скоростью точки. Вращательное движение прямой ОА вокруг центра О является для точки М переносным движением, а скорость той точи m прямой ОА, с которой в данный момент совпадает точка М, будет ее переносной скоростью V пер. Так как эта точка прямой движется по окружности радиуса Оm = r, то по модулю скорость Vnep r и направлена перпендикулярно Оm. Строя на векторах u и V пер параллелограмм, найдем абсолютную скорость V аб точки М по отношению к осям Оx1y1. Так как u и V пер взаимно перпендикулярны, то по модулю V аб u 2 2 r 2 . Рис. 73 §42. Теорема о сложении ускорений (теорема Кориолиса) Проведем без доказательства следующую теорему Кориолиса о сложении ускорений: при сложном движении ускорение точки равно геометрической сумме трех ускорений: относительного, переносного и кориолисова, то есть a аб a от a пер a кор . (56) Кориолисово ускорение вычисляется по формуле: a кор 2 Vот . (57) 79 Таким образом, кориолисово ускорение равно удвоенному векторному произведению переносной угловой скорости (угловой скорости подвижной системы отсчета) на относительную скорость точки. В случае поступательного переносного движения = 0, и, следовательно, a кор = 0. В результате равенство (56) дает: a аб a от a пер , (58) т.е. при поступательном переносном движении абсолютное ускорение точки равно геометрической сумме относительного и переносного ускорений. Результат здесь аналогичен тому, который дает теорема о сложении скоростей. Модуль кориолисова ускорения, если угол между векторами и V от обозначить через , будет равен a кор 2 | | | Vот | sin . (59) Направлен вектор a кор так же, как и вектор V от , т.е. перпендикулярно плоскости, проходящей через векторы и V от , в ту сторону, откуда кратчайшее совмещение с V от видно происходящим против хода часовой стрелки (рис. 74, а). Из рис. 74, а видно также, что направление вектора a кор можно определить, спроектировав вектор V от на плоскость П, П перпендикулярную , и повернув эту проекцию V от на 900 градусов в сторону переносного вращения. Рис. 74 Если относительная траектория – плоская кривая и перемещается все время в своей плоскости, то угол 90 0 (рис. 74, б) и в этом случае по модулю 80 a кор 2 | | | Vот | . (60) Кроме того, как видно из рис. 74, б, направление a кор можно в этом случае найти, повернув вектор относительной скорости V от на 900 в сторону переносного вращения (т.е. по ходу или против часовой стрелки, в зависимости от направления вращения). На рис. 75 для иллюстрации приведенных правил показано направление кориолисова ускорения шарика М, движущегося вдоль трубки АВ в случаях, когда трубка вращается в плоскости чертежа (рис. 75, а) и когда она при вращении описывает конус (рис. 75, б) Рис. 75 Из формулы (59) видно, что кориолисово ускорение может обращаться в нуль в следующих случаях: 1) когда 0 , т.е. когда переносное движение является поступательным (формула 58) или если переносная угловая скорость в данный момент времени обращается в нуль; 2) когда V от = 0, т.е. когда относительная скорость в данный момент времени обращается в нуль; 3) когда 0 или 1800, т.е. когда относительное движение происходит по направлению, параллельному оси переносного вращения, или если в данный момент времени вектор V от параллелен этой оси.