Верификация личности по геометрии и текстуре руки
реклама

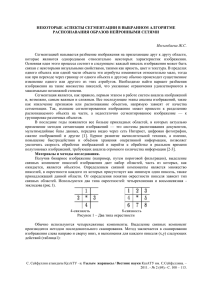
Бесконтактное распознавания личности по геометрии руки Цель работы Исследование и разработка методов сегментации и распознавания изображений в контексте их практического применения в области биометрических технологий. Предметная область Биометрия – всевозможные методы автоматической идентификации человека и подтверждения личности человека, основанные на физиологических или поведенческих характеристиках, называемых биометрическими идентификаторами. Физиологические: отпечатки пальцев, лицо, радужная оболочка) Поведенческие: походка, роспись, речь Постановка задачи Исследовать современные методы и подходы аутентификации, изучить состояние современного рынка биометрии. Проанализировать достоинства и недостатки современных систем распознавания по геометрии руки. Исследовать методы сегментации изображений. Разработать метод сегментации для выделения руки на изображении с произвольным задним фоном для обеспечения бесконтактного сканирования. Разработать алгоритмы распознавания состояния руки и аутентификации по контуру. Оценить возможность использования текстуры (рисунка) ладони для повышения точности аутентификации личности. Провести тестирования разработанных методов и алгоритмов, используя все возможные средства. Состояние рынка Отпечатки пальцев Лицо Геометрия руки Радужка Достоинства подхода геометрии руки Не нарушает конфиденциальность личности. Практически все работающие люди имеют руки. Рука человека имеет способность легко менять состояние и непосредственно сканирование не требует никаких сложных оптических устройств. Идеально подходит к использованию в комбинации с другими биометриками, такими как отпечатки пальцев. Критерий дружественности Схема работы универсальной системы распознавания Верифи кация Нет Да Ввод данных Сканирование Системная БД Блок извлечения признаков Блок сравнения Вывод результата Недостатки существующих методов сегментации Пороговая сегментация: Совпадение по яркости сегментируемого объекта и объектов заднего плана. Градиентная сегментация: Неоднородность заднего фона, присутствие посторонних объектов. Сегментация по цвету: Совпадение цветов сегментируемого объекта и объектов заднего плана Метод бинокулярной сегментации Исходный метод получения z-координаты: Введение обратной связи: Результаты сегментации Фильтрация, контрастирование Для устранения точек выброса на изображении был применен медианный фильтр: 0 1 0 W 1 1 1 0 1 0 Линейное контрастирование позволило выявить глубинную структуру изображения: g = af + b, a g maz g min f g f min g maz , b maz min , f maz f min f maz f min где fmin,fmax реальный динамический диапазон яркостей, gmin,gmax – новый диапазон Построение контура изображения руки Алгоритм следящей пары для построения непрерывного контура: (q x p y q y , q y q x p x ), если p x q x или p y q y R(rx , ry ) , ( r ( p q p q ) / 2 , r ( p q q p ) / 2 ) x x y y y y y x x x где P(px,py) – черная точка; Q(qx,qy) – белая точка; R(rx,ry) – следующая точка контура. Применение контурного медианного восстановления контура руки: W 1 2 2 2 1. фильтра для Метод контрольных точек Определение положения и поворота кисти руки Определение состояния руки (положение пальцев) по контрольным точкам: ai,bi,ri: 1 tR Ri Rпр , 2 R i t R где t – некоторая точка контура; R – ее окрестность; Ri – радиус искривления в точке i контура. Ri рассчитываются по двум соседним точкам с помощью системы, построенной по уравнению окружности (x-x1)2 +(y-y1)2= R2: ( xi 1 x1 ) 2 ( yi 1 y1 ) 2 R 2 2 2 2 ( xi x1 ) ( yi y1 ) R 2 2 2 ( xi 1 x1 ) ( yi 1 y1 ) R Алгоритм хроматической коррекции Изображение руки фильтруется по цвету источника света с помощью цветовой модели HSB, в результате чего формируется нормализованное изображение – отпечаток ладони. H ij , F [0;360o ], H ij F , если H ij F 180o V , o o 360 H F , если H F 180 ij ij 255 V / , если V Gij , 0 , если V где Hij – координата Hue исследуемого пиксела; F – координата Hue для источника света; G – разность цветовых тонов; – допустимый диапазон Расхождение отпечатков Отпечатки ладони: а – освещение сверху, б – освещение сбоку, в – расхождение. Оценка полученного метода Недостатком разработанного метода является достаточно низкая производительность. Это обуславливается большим количеством преобразований, которым подвергается исходное изображение. Выход: Применение способа «постепенного уточнения», применяемого в современных системах распознавания текста. Тестирование методов и алгоритмов Введение обратной связи в алгоритме построения буфера глубины стереоизображения. Выбор параметров для медианной фильтрации. Применение медианной фильтрации для восстановления контура изображения и устранение нестабильных контрольных точек. Проверка качества хроматической коррекции Тестирование позволило усовершенствовать разработанные методы и алгоритмы сегментации и распознавания изображения руки и подтвердило их эффективность и пригодность для использования в реальных биометрических системах.