Конференция_Чан_Ван_Нам Проектированиеx
реклама

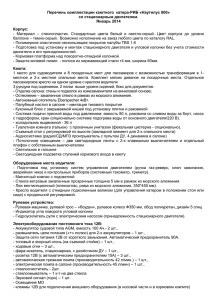
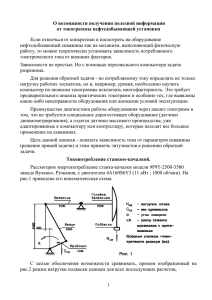
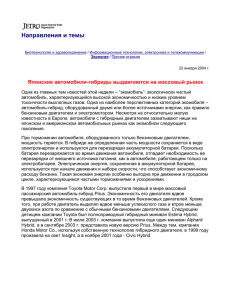
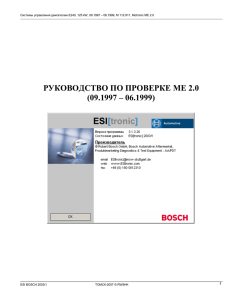
ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Чан Ван Нам Национальный исследовательский Томский политехнический университет, г. Томск Научный руководитель: Леонов С.В, доцент/ кафедра ИКСУ В данной статье осуществляется подбор двигателя постоянного тока по параметрам, определённым исходя из условия задания. Двигатель обеспечивает преобразование электрической энергии в механическую в соответствии с алгоритмом работы технологической установки. Подбираются силовой драйвер, датчики скорости и тока, микроконтроллер, который позволяет управлять двигателем. Проведена настройка и синтез регулятора. Электромеханическая система служит для преобразования электрической энергии в механическую и состоящая из следующих частей: электродвигатель; преобразовательного устройства; передаточного устройства. ПУ – преобразовательное устройство; ПУ – передаточное устройство; РД – ротор двигателя; ЭМП – электромеханический преобразователь; ИМ – исполнительный механизм; ЗУ – задающее устройство; ДОС – датчик обратной связи. Рисунок 1. Структурная схема электропривода Исходя из требования характеристик и диаграммы работы исполнительного механизма, нам необходимо определить средний момент электропривода и среднюю мощность за цикл работы. Рассчитаем средней мощность за цикл работы по следующей формуле: Pс где: 6 ( Pck * номk )2 tk2 k 1 6 Bk tk k 1 kдин Pсk M k .k / , k 0 (1 0 ) дин 460 , 0 0, 7...0, 78 . pk ном , kдин 1,1...1,3 , Определяем средний момент двигателя по следующей формуле: 6 Mc M k 1 2 k tk 2 6 t k 1 k При полученных Pс и M с производим выбор двигателя, при этом мощность двигателя Pд Pс M д M с . В этой ситуации мы проводим на пример выбора систему управления вентильным двигателем. Подбор силового драйвера: Мы будем использовать модуль управления двигателем модернизированный МУКДМ. Такой модуль предназначен для управления коллекторным двигателем постоянного тока. МУКДМ выполнен на основе современных достижений технологий микроэлектроники, цифроаналоговых интегральных схем и контроллеров обработки цифровых и аналоговых сигналов со встроенными ШИМ- схемами. Модуль МУКДМ представляет собой сборку модуля управления транзисторами М31 и модуля управления МККД. Структурная схема МУКДМ представлена на рис 2. Рисунок 2.Структурная схема МУКДМ Силовой выход : Рисунок 3. Схема подключения МУКДМ с типом силовой сборки «4» Выбор датчиков тока и скорости Используя датчик тока мы можем измерить тока якоря двигателя U y . Датчик подбирается таким образом, чтобы его максимальный ток был больше максимального тока двигателя. Для измерения скорости ротора необходимо выбрать датчик способный осуществить данные задачи. Наиболее подходящим для двигатель постоянного двигателя будет энкодер. С помощью системы датчиков возможно получить сигнал из работающего двигателя. Потом такие сигналы падает в вход микроконтроллера, чтобы управляет двигателем. Выбор микроконтроллера Для управления двигателем мы будем выбрать микроконтроллер фирмы ATMEL ATmega 16. По количеству портов вводов-выводов, а также по параметрам своей вычислительной мощности данный микроконтроллер подходит для управления вентильным двигателем. Выбор микроконтроллера основывался на следующих требованиях: Контроллер должен обрабатывать 5-7 входных сигналов и выполнять ряд математических операций. Частота дискретизации широтно-импульсного преобразователя 15-20 кГц. Необходимо обеспечить переключение на выходе по 2-3 фазам с частотой не менее 20 кГц. Заключение В ходе выполнения данной стати было знакомство с проектированием системы управления двигателем на базе микроконтроллера ATmega 16 фирмы ATMEL. При проектировании были выбраны наиболее подходящие элементы силовой и микроконтроллерной части. Полученные знания проектирования системы управления электроприводом очень важны в дальнейшем, так как в современном мере происходит все большая автоматизация производства, создание роботов, в основе работы которых лежат приводы, управляемые с помощью микроконтроллеров, и могут быть применены в будущем на практике. Список литературы 1. Парфенов А.Н. Автоматизированный электропривод в нефтяной промышленности . 2. К.А. Хорьков, А.К. Хорьков “Электромеханические системы (часть 1, 2)”. Учебное пособие, Томск 1999