ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
реклама

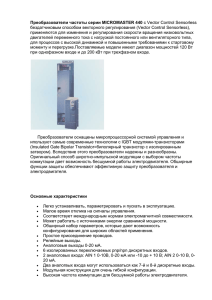
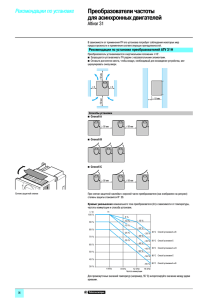
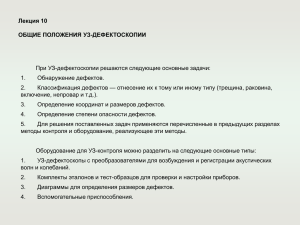
ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН Общие характеристики Устройства, преобразующие величину измеряемого неэлектрического параметра (температура, давление, масса, длина и т.п.) в электрический сигнал – ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН (Общее: датчик, детектор, измеритель, зонд, чувствительный элемент… Специальное: акселерометр, расходометр, тахометр… ) ПАССИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ – использует для преобразования энергию измеряемого параметра. АКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ – использует для рпеобразования энергию внешнего источника. Чувствительность: S = XВЫХ / ХВХ Линейность : S = const Гистерезис показаний: Зависимость выходной величины преобразователя от знака изменения входной величины (возрастание или убывание) При использовании преобразователей необходимо помнить: - о его частотных характеристиках; - о его помехоустойчивости ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН Общая конструкция преобразователя. Чувствительный элемент воспринимает свойство объекта и преобразует его в другую физическую величину. Преобразующий элемент – превращает эту физическую величину в электрический сигнал. Схемы включения преобразователей: -Последовательная структурная схема включения преобразователей – входной сигнал каждого последующего преобразователя является выходным сигналом предыдущего, а входной величиной первого – измеряемая величина; -Дифференциальная схема соединения преобразователей; -Логометрическая схема подключения преобразователей -Компенсационная схема включения преобразователей. ПОСЛЕДОВАТЕЛЬНАЯ СТРУКТУРНАЯ СХЕМА ВКЛЮЧЕНИЯ Термоанемометр – измерение скорости потока газа. Платиновая проволока с сопротивлением Ri включена в схему измерения тока. При обдувании провода потоком газа со скоростью V изменяется сопротивление Ri , соответственно изменяется ток I и стрелка отклоняется на угол y. Последовательность преобразований: 1. t = F ( V ) 2. Ri = Rt ( 1 + t ) 3. I = E / ( R0 + Rt ) 4. = SA I и илилокончательно: =иSA I = SA E / ( R0 + Rt )= SA E / ( R0 + Rt ( 1 + F ( V ) )) Для чувствительности: S1 = dt / dV ; S2 = dR / dt ; S3 = dI / dR ; S4 = d / dI или SM = d / dV = S1 S2 S3 S4 Общая чувствительность прибора равна произведению чувствительностей, входящих в него преобразователей. ПОСЛЕДОВАТЕЛЬНАЯ СТРУКТУРНАЯ СХЕМА ВКЛЮЧЕНИЯ Погрешности измерений Каждое преобразование вносит свою погрешность, которые накапливаются: Y1 = Y1H + Y1 Y2 =Y2H + S2 Y1 + Y2 Y3 = Y3H + (S2 Y1 + Y2 ) S3 + Y3 = Y3H + S2 S3 Y1 + S3 Y2 + Y3 Общая погрешность составит при этом: Y = Y - Y H = S 2 S3 Y 1 + S 3 Y 2 + Y 3 Приведенная погрешность при этом равна сумме приведенных погрешностей Y = Y1 +Y2 +Y3 Приведенная среднеквадратичная погрешность равна: 2 2 2 2 ПР 1 ПР 2 ПР 3 ДИФФЕРЕНЦИАЛЬНАЯ СХЕМА ВКЛЮЧЕНИЯ Дифференциальная схема содержит два канала с последовательным соединением преобразователей, выходные сигналы которых поданы на схему сравнения, ее выходной сигнал представляет собой функцию разности двух входных сигналов. 1. Линейная функция: Y1 = S X1 + Y0 ; Y2 = S X2 + Y0 Y = S ( X1 - X2 ) Варианты: 1.1. X2 = const dY / dX = S 1.2. X1 = X0 + X ; X2 = X0 - X Y = 2 S X ; dY / dX = 2 S 2. Нелинейные функции преобразования каналов: Y1 = F ( X0 + X) ; Y2 = F ( X0 - X) – раскладываем в степенной ряд: Y1 = F ( X0 ) + F '(X0 ) X + [ F '' ( X0 ) / 2!] X2 +…. Y2 = F ( X0 ) - F '(X0 ) X + [ F '' ( X0 ) / 2!] X2 - …. Y = Y1 - Y2 = 2 F '(X0 ) X – функция преобразования – ЛИНЕЙНА!!! Как правило, первичные преобразователи имеют равные аддитивные погрешности, не зависящие от входной величины, тогда: Y1 = F ( X1 ) + Y ; Y2 = F ( X2 ) + Y; Y = Y1 - Y2 = F ( X1 ) - F ( X2 ) В дифференциальных преобразователях аддитивные погрешности каналов – КОМПЕНСИРУЮТСЯ ! КОМПЕНСАЦИОННАЯ СХЕМА ВКЛЮЧЕНИЯ В компенсационной схеме входная величина Х подается на один вход сравнивающего устройства, а на другой вход подается сигнал обратной связи ХОС, величина которого определяется размером выходной величины Y. Разность Х = Х - ХОС поступает в преобразователь «1». Если преобразователи «1» и «2» имеют линейные функции преобразования: Y = S1 X ; XOC = S2 Y , то XOC = S1 S2 X = S1 S2 (Х - ХOC ) или X = ( 1 + 1 / S1 S2 ) XOC Поскольку, как правило, S1 S2 >> 1 , то X = XOC Значит величина Y определяется преобразователем «2» и мало зависит от преобразователя «1». Функция преобразователя и его чувствительность оценим в предположении, что первичные преобразователи имеют пропорциональные функции преобразования Y = S1 X ; XОС = S2 Y , Y = [S1 / (1 + S1 S2 )] X или тогда S = S1 / (1 + S1 S2 ) 1 / S2 КОМПЕНСАЦИОННАЯ СХЕМА ВКЛЮЧЕНИЯ Погрешности устройства. Погрешности устройства можно определить из анализа чувствительности S = F (S1 S2 ) Изменение S можно определить как полный дифференциал: S = ( dF / dS1 ) S1 + ( dF / dS2 ) S2 ( dF / dS1 ) = 1 / (1 + S1 S2 )2 ( dF / dS2 ) = - S1 2 / (1 + S1 S2 ) Относительная погрешность Y = Y / Y равна относительному изменению чувствительности S / S, тогда : Y = Y / Y = [ Y1 / (1 + S1 S2 )] - [ Y2 / (1 + 1 / S1 S2 )] или при S1 S2 >> 1 Y = Y1 / S1 S2 - Y2 В приборах с обратной связью существенно уменьшается вклад первого преобразователя в общую погрешность прибора. ЛОГОМЕТРИЧЕСКАЯ СХЕМА ВКЛЮЧЕНИЯ Схема содержит два канала с последовательным соединением преобразователей, выходные сигналы которых поданы на логометрический преобразователь, выходная величина которого является частным от деления входных величин..