Слайд 1 - MES conference
реклама

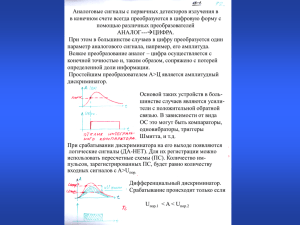
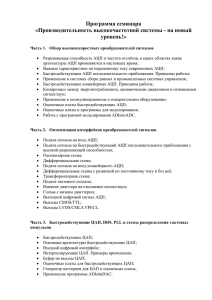
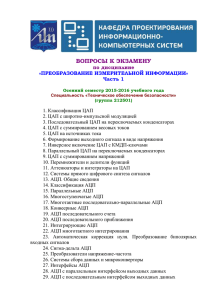
Тестирование и предельные метрологические возможности импульсно-потенциального АЦП в СнК Крутчинский С.Г. Жебрун Е.А. ИТА ЮФУ, МНТЦ «МикАн» [email protected] Исходные предпосылки • Доминирующими факторами, ограничивающими точность аналоговых интерфейсов и АЦП являются: - диапазон линейной работы по напряжению, - дрейф нуля, - неидеальность УВХ (для классических АЦП) • Диапазон линейной работы по напряжению задаётся преимущественно технологическим процессом, особенно это следует учитывать при использовании стандартных низковольтовых КМОП-транзисторов • Существуют два базовых подхода для компенсации влияния дрейфа нуля аналоговых интерфейсов на точность АЦ-преобразования: - испытания на стенде с созданием таблицы для коррекции изготовленных схем - внутрисистемная коррекция через процедуру инициализации (встроенный ЦАП) Преимущества использования импульснопотенциального АЦП Методическая погрешность такого преобразования периодом колебаний тактового генератора (2tfT) ; Предельная разрядность счётчиков цифровой части; преобразования определяется определяется емкостью При использовании стандартной 0,18мкм КМОП технологии частота счётчиков может достигать 2ГГц, что обеспечивает 6кГц частоту преобразования при 16bit точности и 100кГц при 12bit; Измерение "малых" величин осуществляется точностью в силу принципа квантования по энергии ; с более высокой Структурные особенности АЦП обеспечивают: • Оценку производной измеряемой величины; • Возможность асинхронной работы параллельных каналов преобразования и программируемого ядра МЭС; • Интеграцию в смешанные СнК и СвК без специальных интерфейсов. Структура АЦП импульсно-потенциального типа Преобразование опорного напряжения Еоп uk(t) U+ S=1 t0 Tп S=0 t1 Tп/2 Tи S=1 t2 Tп/2 S=0 S=1 t t3 t4 t5 UПреобразование измеряемой величины еx(t) t0 (U k / E0 e0 (1 k ) / E0 ), U U U U . Tи k , Tп k e x t + E 0 2 Е0 1 1 U др1 E 0 E см , uk(t) U+ tз Tп Tи tп tи t Uex ≠0 E0 ≠0 ex =0 E0 ≠0 E0 =0 интервал тестирования ex ≠0 E0 ≠0 2 U др2 U дрАИ E 0 E см . U U tп k , E0 2 1 0 U U tи k , 1 T t t Tп e x E0 и и п ; Tп tп tи - Tи T Tп Tи Tи Tп t и t п . ex E0 и E0 Tп t и Tи Tп tп В случае влияния белого шума: U U x tи k 1 1 2 где x - среднеквадратическое ( x D x) значение случайной составляющей на выходе аналогового интегратора. Приращение длительности положительного импульса, вызванное влиянием случайных воздействий: tи x / 1 Если статический коэффициент усиления ОУ достаточно велик: 2 (t ) 02 x Тогда: tи tи ; 02 2G02 f n (для стационарного процесса с постоянным спектром от –fn до +fn) 0 tи 1 при двойной разрядности преобразования tи и наихудшего случая получим взаимосвязь параметров проектирования АЦП при условии, что найденная погрешность не превышает погрешность метода преобразования: n m 1 0 2 1 tи 1 для определения постоянной времени интегратора можно использовать неравенство: 2 2n m1 1 t fT 0 Например, при диапазоне рабочих частот в 100кГц при fT=2ГГц, τ=150мкс, n=12, m=4 оказывается достаточным при Δ1=100мкВ Архитектура цифровой части Управление работой счётчиков и вспомогательных регистров Принцип взаимодействия аналоговой части АЦП с системой двоичных счётчиков uk(t) U+ tз Tп Tи tп tи t Uex ≠0 E0 ≠0 ex =0 E0 ≠0 E0 =0 ex ≠0 E0 ≠0 интервал тестирования Временная диаграмма работы АЦП в режиме тестирования В случае использовании реверсивных счетчиков чувствительность измеряемых величин минимизируется (Ти-Тп, tи-tп, tи-Ти) uk(t) U+ tз Tп Tи tп tи t Uex ≠0 E0 ≠0 ex =0 E0 ≠0 E0 =0 ex ≠0 E0 ≠0 интервал тестирования 1. be =0 , bE =0; (ex ≠0, E0≠0) 2. Измерение длительности Тп (заполнение СТ1) 3. Измерение длительности Ти (заполнение СТ3 в инкрементирующем режиме, декрементирование СТ2) 4. Измерение длительности tп (заполнение СТ1, декрементирование СТ4, be=1, bE=0 : ex=0, S1 разомкнут) 5. Измерение длительности tи (заполнение СТ2 в инкрементирующем режиме, заполнение СТ4 в инкрементирующем режиме, be =0, bE =1 : E0=0, S2 разомкнут) 6. Начало основного цикла работы АЦП (be =0 , bE =0 : ex ≠0, E0≠0) 7. Измерение длительности Тп (заполнение СТ1, декрементирование СТ3) 8. Измерение длительности Ти (заполнение СТ3 в инкрементирующем режиме) 9. Реализация соотношения для вычисления ex : e x E0 E0·(RG32/RG12)+E0·(RG31/RG22)·(RG32/RG12-RG4/RG11) Tи Tп Tи Tи Tп t и t п . E0 Tп t и Tи Tп tп 10. Переход к началу основного цикла работы АЦП (шаг 6) либо конец работы алгоритма Основные выводы Полученные в работе результаты тестирования влияния дрейфа нуля аналоговых трактов на результаты АЦ-преобразования позволяют минимизировать действие доминирующих технологических погрешностей изготовления полупроводниковых компонентов; Управление опорным источником и отключение входной величины может быть легко реализовано в современных MEMS мостового типа; За счёт тестового периода (совокупности фаз) вычисляются поправочная составляющая измеряемой величины, обеспечивающая предельную точность преобразования; При необходимости процедура тестирования может быть осуществлена повторно в ходе работы системы; Вводимый интервал тестирования не изменяет базовых свойств АЦП – асинхронность, режим прямого доступа к ОЗУ результатов преобразования, низкое влияние параметров аналоговых компонентов, а также возможность оценки производной входной величины, низкое влияние шумов и импульсных помех; Совокупность указанных результатов обеспечивает импульснопотенциальному АЦП серьёзные преимущества в СФ блоках СнК, ориентированных на датчиковую и диагностическую аппаратуру.