ТЕМА 2. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ.ЛЕКЦИЯ № 10
реклама

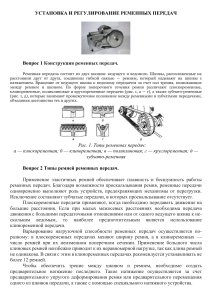
ТЕМА 2. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ. ЛЕКЦИЯ № 10. РЕМЕННЫЕ ПЕРЕДАЧИ Вопросы, изложенные в лекции 1 Ременные передачи. Общие сведения. 2 Классификация ременных передач. 3 Геометрия и кинематика РП. 4 Силовые соотношения в ременной передаче. Критерии работоспособности. 5 Материалы и конструкция ремней РП. Натяжные устройства. Ременные передачи Ременная передача – это механизм, предназначенный для передачи вращательного движения посредством фрикционного взаимодействия или зубчатого зацепления замкнутой гибкой связи (ремня) с жесткими звеньями (шкивами), закрепленными на входном и выходном валах механизма. Рисунок 1 – Принципиальная схема ременной передачи Ременные передачи Достоинства: 1 Возможность передачи движения на достаточно большие расстояния (до 15 м). 2 Плавность и малошумность работы. 3 Смягчение крутильных вибраций и толчков за счет упругой податливости ремня. 4 Предохранение механизмов от перегрузки за счет проскальзывания ремня при чрезмерных нагрузках. Недостатки: 1 Относительно большие габариты. 2 Малая долговечность ремней. 3 Непостоянство передаточного числа за счет проскальзывания ремня. 4 Высокая чувствительность передачи к попаданию жидкостей (воды, топлива, масла) на поверхности трения. Ременные передачи. Классификация 1 По форме поперечного сечения ремня: 1.1 Плоскоременные (рисунок 2 а). 1.2 Клиноременные (рисунок 2 б). 1.3 Поликлиноременные (рисунок 2 г). 1.4 Круглоременные (рисунок 2 в). 1.5 Зубчатоременная (рисунок 2 д). Рисунок 2 – Основные виды фрикционных ремней: а) плоский; б) клиновой; в) круглый; г) поликлиновой; д) зубчатый. Ременные передачи. Классификация 2 По взаимному расположению валов и ремня. 2.1 Открытая передача – передача с параллельными геометрическими осями валов и ремнем, охватывающим шкивы в одном направлении (шкивы вращаются в одном направлении) (рисунок 3 а). 2.2 Перекрестная передача – передача с параллельными валами и ремнем, охватывающим шкивы в противоположных направлениях (шкивы вращаются во встречных направлениях) (рисунок 3 б). 2.3 Полуперекрестная передача – оси валов которой перекрещиваются под некоторым углом (чаще всего 90) (рисунок 3 в). Рисунок 3 – Виды ременной передачи Ременные передачи. Классификация 3 По числу и виду шкивов, применяемых в передаче: 3.1 С одношкивными валами. 3.2 С двушкивным валом, один из шкивов которого холостой. 3.3 С валами, несущими ступенчатые шкивы для изменения передаточного числа (для ступенчатой регулировки скорости ведомого вала). 4 По количеству валов, охватываемых одним ремнем: двухвальная, трех-, четырех- и многовальная передача. 5 По окружной скорости ремня: 5.1 Тихоходные (V≤10 м/с). 5.2 Среднескоростные (10<V≤30 м/с). 5.3 Быстроходные (V>30 м/с). 6 По наличию вспомогательных роликов: 6.1 Без вспомогательных роликов. 6.2 С натяжными роликами. 6.3 С направляющими роликами. Геометрия и кинематика РП При проектировании открытых РП определяют: - диаметры шкивов D1, D;2 - межосевое расстояние a; - расчетную длину ремня L; - угол охвата ремнем малого (ведущего) шкива (угол, на котором ремень касается поверхности шкива) . 1 N 3 D1 (0,052...0,061) D2 u D1(1 ) a 2D1 D2 – для ПРП a 0,55D1 D2 h L 2a 2 D2 D2 D1 2 D 1 D D1 1 180 57 2 Рисунок 4 – Геометрия открытой ременной передачи – для КРП a 4a Геометрия и кинематика РП Удлинение каждого отдельно взятого элемента ремня меняется в зависимости от того, на какую ветвь этот элемент в данный момент времени попадает. При этом, проходя по ведущему шкиву (при переходе с ведущей ветви на свободную), эта элементарная часть укорачивается, а при движении по ведомому шкиву (переходя со свободной ветви ремня на его ведущую ветвь) – удлиняется. Следовательно: V1 > V2 1) работа ременной передачи без скольжения ремня по рабочей поверхности шкивов невозможна; 2) скорости движения ведущей и свободной ветвей ремня различны, а следовательно, различны и скорости рабочих поверхностей ведущего и ведомого шкивов. Отношение разности между окружными скоростями на рабочей поверхности ведущего и ведомого шкивов к скорости ведущего шкива называют коэффициентом скольжения передачи: V1 V2 V2 1 . V1 V1 Передаточное отношение РП: n1 D2 u . n2 D11 Буксование ремня – скольжение ремня относительно шкива по всей дуге обхвата . 1 Силовые соотношения в РП В ременной передаче силы нормального давления между поверхностями трения можно создать только за счет предварительного натяжения ремня. При неработающей передаче силы натяжения обеих ветвей будут одинаковыми F0 (рисунок 5, а). При передаче момента Т1 за счет трения ведущего шкива о ремень, набегающая на этот шкив ветвь получает увеличенное натяжение F1, сбегающая – ослабляется F2 (рисунок 5, б). Из условия равновесия шкива: d d T1 F2 1 F1 1 0. 2 2 Рисунок 5 – Силы в ременной передаче F1 F2 Ft , Для поступательно движущихся ветвей ремня: где Ft – окружная сила, предаваемая ремнем. F1 F2 2 F0 . Суммарное натяжение ветвей ремня остается неизменным: Тогда: F1 F0 0,5Ft ; F2 F0 0,5 Ft . Силовые соотношения в РП Силовую связь между F1 и F2 установил Эйлер: где F1 F2e f c , e – основание натурального логарифма (e 2,7183); f – коэффициент трения покоя (коэффициент сцепления) между материалами ремня и шкива; c – угол скольжения. Отношение разности сил натяжения в ветвях ремня работающей передачи к сумме этих сил называется коэффициентом тяги (). F1 F2 Ft . F1 F2 2 F0 Оптимальная величина коэффициента тяги: e f 1 0 f . e 1 Оптимальная величина коэффициента тяги зависит только лишь от конструктивных параметров передачи и качества фрикционной пары материалов ремня и шкива. Критерии работоспособности РП Тяговая способность и долговечность ремня – основные критерии работоспособности ременной передачи. Проектный расчет обычно выполняется по тяговой способности, а расчет долговечности является проверочным. Тяговую способность РП характеризует график (рисунок 6.) На нем выявляются 3 зоны: 1 – зона упругого скольжения (0 0; меняется линейно); 2 – зона частичного буксования (0 max, быстро растет); 3 – зона полного буксования ( max скольжение полное). Рисунок 6 – Кривые скольжения и КПД 0 – предел рационального использования ремня. Зона с 0 до max – способность ремня переносить перегрузки. Силы и напряжения в ремнях РП В ремне возникают следующие напряжения от действия сил: - натяжение от начального натяжения ремня ; 0 - натяжение от рабочей нагрузки ; p ; иi - - натяжение от изгиба вокруг шкива - натяжение от действия центробежных сил при обегании шкива . цi Рис.7 Эпюра распределения напряжений по длине ремня На внешней стороне ремня все виды названных напряжений являются растягивающими и потому суммируются. Таким образом, максимальные растягивающие напряжения в ремне: max 0 p иi цi . Материалы и конструкция ремней РП Общие требования к материалам приводных ремней: - износостойкость и прочность при циклических нагрузках; - высокий коэффициент трения со шкивами; - малый модуль упругости и изгибная жесткость. Рисунок 9 – Сечения плоских резинотканевых ремней: 1 – слои кордткан; 2 – обкладки. Рисунок 8 – Сечения клиновых ремней: а) кордтканевый; б) кордшнуровой; в) поликлиновой. Рисунок 10 – Сечения плоских ремней: 1 – кордшнуровые; 2 – полиамидные. Конструкции натяжных устройств РП Назначение натяжных устройств: - создание начального натяжения, обеспечивающего необходимую силу трения ремня о шкив; - увеличение угла обхвата ремнем малого шкива; - компенсация увеличения длины ремня в результате вытягивания. Рисунок 12 – Натяжное устройство периодического действия Рисунок 11 – Натяжное устройство постоянного действия Рисунок 13 – Натяжное устройство автоматического действия Ременные вариаторы Вариатор – это передача с плавно изменяющимся передаточным отношением. а) б) Рисунок 14 – Пластинчатоременный вариатор (а) и ремень (б) Примеры чертежей шкивов РП Рисунок 15 – Конструкция напряжений изгиба шкива, разгружающего вал от Примеры чертежей шкивов РП Примеры чертежей шкивов РП Примеры чертежей шкивов РП Лекция окончена. Спасибо за внимание!