Коррекция геометрического шума в СТЗ со сканирующей линейкой фотодатчиков методом отслеживания строк подвижного
реклама

ТЕХНИЧЕСКОЕ ЗРЕНИЕ В СИСТЕМАХ УПРАВЛЕНИЯ
Международная лаборатория «Сенсорика»,
ИПМ им.М.В.Келдыша РАН
Коррекция геометрического шума
в СТЗ со сканирующей линейкой
фотодатчиков методом
отслеживания строк подвижного
изображения
Андреев Виктор Павлович, к.ф.-м.н.
Москва, 2011г.
1
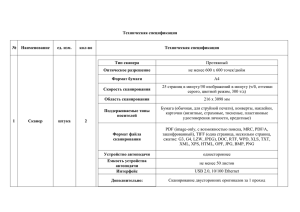
Параллельное сканирование линейкой
фотодатчиков:
Ui,j
У
К
О
М
М
У
Т
А
Т
О
Р
ФД1
ФД2
ФД3
ФДi
ФДN
E(x)
Поле изображения
Сканирование
j = 1, 2 …, M
• Отсчёты видеосигнала Ui,j формируются в
процессе последовательной коммутации
фотодатчиков линейки (ФДi), которые, как
единое целое, перемещаются в направлении,
перпендикулярном расположению
фотодатчиков на линейке (сканирование).
2
Функция преобразования ИК-излучения в
электрический сигнал фотодатчика:
U i ( x) S i Ei ( x) C i
где : Si - интегральная чувствительность i-го
фотодатчика ( 0 < Si ≤ 1 );
Ci - составляющая видеосигнала,
обусловленная темновым током i-го
фотодатчика ( Ci ≥ 0 );
Ei (x) - функция яркости оптического
изображения, сканируемого по оси x
i–м фотодатчиком (Ei (x) ≥ 0 );
N - число фотодатчиков в линейке.
3
Разброс параметров фотодатчиков
линейки
• «Геометрический» шум - несоответствие выходного
сигнала Ui(x) изображению Ei(x).
• Возникает вследствие разброса значений
чувствительности {Si} и значений темновой составляющей
{Ci} фотодатчиков
(i-1)
U
(i+1)
(i)
C
Ui = Si * E + Ci
E
4
Проявление «геометрического» шума
5
Процесс коррекции видеосигнала
разделяется естественным образом на
две части:
• собственно компенсация
неравномерности видеосигнала,
которую следует выполнять с частотой
опроса фотодатчиков линейки:
U i' ( x) K i U i ( x) Ri
• вычисление корректирующих
коэффициентов {Ki } и {Ri }, которое может
выполняться с более медленной скоростью.
6
Вычисление корректирующих
коэффициентов
• Использование одного или двух
эталонных источников излучения.
• Использование статистических
свойств изображения.
• Использование движения
оптического изображения
относительно поля
сканирования
7
Коррекция искажений, вызванных
разбросом по чувствительности
Переходные коэффициенты, вычисленные по
кадру длиной L:
Di (U )
Di 1 (U )
Gi ,i 1
Gi ,i 1
L
1
2
Di (U ) [U i ( x) U i ] dx
L0
Si
i ,i 1
S i 1
i ,i 1
Di ( E )
Di 1 ( E )
Точные значения переходных коэффициентов
Gi,i+1 получаются при:
1
i ,i 1
8
Вычисление значений корректирующих
коэффициентов по чувствительности { Ki }
S k
, i k;
S i S i 1 Gi ,i 1 , i k ;
S / G
i 1 i ,i 1 , i k ,
где: k – номер опорного фотодатчика
K i A / Si
для i = 1, 2, … , N
9
Коррекция искажений, вызванных
разбросом по темновой составляющей
Переходные коэффициенты, вычисленные по
кадру длиной L (при S i S i 1 Gi ,i 1 ):
Qi ,i 1 U i Gi ,i 1 U i 1
Qi ,i 1 (Ci Gi ,i 1 Ci 1 ) Si Ei ,i 1
где:
Ei ,i 1 Ei Ei 1
Точные значения переходных коэффициентов
Qi,i+1 получаются при:
Ei ,i 1 0
10
Вычисление значений корректирующих
коэффициентов по темновой
составляющей { Ri }
C k
, i k;
Ci Qi ,i 1 Ci 1 Gi ,i 1 , i k ;
(C Q ) / G
i 1 i 1,i i ,i 1 , i k ,
где: k – номер опорного фотодатчика
Ri Ci для i = 1, 2, … , N
11
i,i+1=1 и Ei,i+1=0, если организовать сканирование
одной строки оптического изображения двумя
смежными фотодатчиками:
1. Использовать дефлектор, встроенный в
оптико-механическую систему
сканирования, для смещения оптического
изображения в направлении нормали к
направлению сканирования ровно на
межпиксельное расстояние.
2. Организовать или использовать
медленное перемещение оптического
изображения в направлении нормали к
направлению сканирования и
зафиксировать момент, когда (i - 1)-й
фотодатчик будет сканировать i -ю
строку изображения.
12
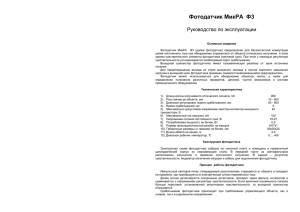
Дискретная модель процесса
сканирования
h
• Jh
1,1
a
1,2
1,3
1,j
1,M
2h
2,1
2,2
2,3
2,j
2,M
i,1
i,2
i,3
i,j
i,M
Исходное
изображение
N,1
N,2
N,3
N,j
Направление сканирования
x
Моделирование сканирования
изображения фотоприемной линейки.
T M t
- время кадра
t – время опроса N
фотодатчиков
j = 1, 2, … , M
y
N,M
x(t ) x0 j (t ) h x
y(t ) y0 q(T ) y
q = 1, 2, … , 2h
За время кадра T
изображение
смещается на y
13
Дискретная модель фотодатчика
Из линейной модели фотодатчика
U i [ x(t )] S i Ei [ x(t )] Ci
следует, что отсчёты выходного сигнала для j-й строки
i-го фотодатчика при сканировании i-й строки
оптического изображения и соседнего (i - 1)-го
фотодатчика при сканировании (i - 1)-й строки (без
учета аддитивной составляющей)
U i , j S i Ei , j
U i 1, j S i 1 Ei 1, j
для i = 1, 2, … , N
j = 1, 2, … , M
14
Критерий
Определим
функцию: L(i ,ji)1 Ln(U i , j ) Ln(U i 1, j )
[ Ln( S i ) Ln( S i 1 )] [ Ln( Ei , j ) Ln( Ei 1, j )]
В процессе перемещения изображения перпендикулярно
направлению сканирования (i -1)-й фотодатчик
постепенно будет приближаться (q→2h) к участку
изображения с яркостью Ei,j, и в тот момент, когда
(i -1)-й фотодатчик займет место i -го фотодатчика
(q=2h), т.е. будет сканировать i -ю строку изображения,
L(i ,ji)1 Ln(S i ) Ln(S i 1 ) L Const
для всех j отсчетов i -го и (i-1)-го фотодатчика
15
Алгоритм
1. Для i -го фотодатчика, сканирующего [i]-ю строку
оптического изображения, запомнить значения
L[ii,]j Ln(U i[,i j] ) для всех j отсчетов [i]-й строки
2. Для (i - 1)-го фотодатчика с периодичностью сканирования
(T) выполнять вычисления по формуле:
L( j ) (q) L[i ] Ln(U [ q ] ) для всех j отсчетов [q]-й строки
i ,i 1
i, j
i 1, j
3. Когда (i - 1)-й фотодатчик займет место i –го, т.е. [q = 2h],
для каждой пары отсчетов m и n (из M на строке)
J i(,mi,1n) (q) L(i ,mi)1 (q) Lin,i1 (q) 0 для всех j отсчетов
Можно предложить следующий интегральный
критерий:
M
J i ,i 1 (d ) L(i ,ji)1 (d q ) L[i ,ji11] (d q )
j 2
dq – расстояние между i-й строкой оптического изображения
и центром (i - 1)-го фотодатчика при q-м сканировании
16
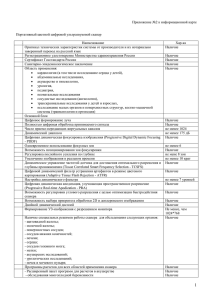
Проверка эффективности метода
путем моделирования на ЭВМ
h
a
1,1
1,2
1,3
1,j
1,M
2h
2,1
2,2
2,3
2,j
2,M
i,1
i,2
i,3
i,j
i,M
Исходное
изображение
N,1
N,2
N,3
N,j
Направление сканирования
y
(x x y) – pixel
исходного
цифрового
изображения;
a = 20 pixels ;
h = 25 pixels.
N,M
x
Моделирование сканирования
изображения фотоприемной линейки.
17
Исходные цифровые изображения
1. Аэрофотоснимок 2790 × 480 pixels, 256 уровней
квантования яркости
Направление сканирования
2. Аэрофотоснимок 3000 × 470 pixels, 256 уровней
квантования яркости
Направление сканирования
18
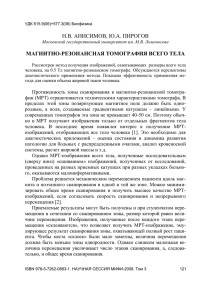
Эксперимент 1
(изображение 1)
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1=C2=C3=C4=C5=0;
q = y есть 1 pixel за кадр.
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
19
Эксперимент 1
(изображение 2)
N = 5 (5 фотодатчиков); M = 110 ;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1=C2=C3=C4=C5=0;
q = y есть 1 pixel за кадр.
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
20
Эксперимент 2
(изображение 1)
J(d)/Jmax
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1=170, C2=100, C3=220,
C4=80, C5=190;
q = y есть 1 pixel за кадр.
Разброс параметров: по
{S} составляет 25% и по
{С} составляет 86%
dq
21
Эксперимент 2
(изображение 2)
J(d)/Jmax
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1=170, C2=100, C3=220,
C4=80, C5=190;
q = y есть 1 pixel за кадр.
Разброс параметров: по
{S} составляет 25% и по
{С} составляет 86%
dq
22
Эксперимент 3
(изображение 1)
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1= C2= C3= C4= C5=0;
q = y есть 1 pixel за кадр.
Угол 5,7О (5/50): Ошибка 1 pixel
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
23
Эксперимент 3
(изображение 2)
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1= C2= C3= C4= C5=0;
q = y есть 1 pixel за кадр.
Угол 5,7О (5/50): Ошибка 1 pixel
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
24
Эксперимент 4
(изображение 1)
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1= C2= C3= C4= C5=0;
q = y есть 1 pixel за кадр.
Угол 11,3О (10/50): Ошибка 6 pixels
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
25
Эксперимент 4
(изображение 2)
N = 5 (5 фотодатчиков); M = 110;
S1 = 1.0, S2 = 0.75; S3 = 1.0, S4 = 0.75;
S5 = 1.0;
C1= C2= C3= C4= C5=0;
q = y есть 1 pixel за кадр.
Угол 11,3О (10/50): Ошибка 0 pixels
J(d)/Jmax
Разброс параметров по
{S} составляет 25%
dq
26
Выводы:
Предложенный критерий:
1.
2.
3.
4.
Позволяет зафиксировать смещение изображения на
величину межпиксельного расстояния с точностью
до долей этого расстояния
Устойчив к разбросу параметров фотодатчиков
линейки и за счет интегральности устойчив к
качеству исходного изображения
Устойчив к изменению направления смещения
оптического изображения относительно направления
сканирования (до ±110)
Может быть использован как для решения задачи
борьбы с «геометрическим» шумом, так и для
стабилизации оптического изображения на поле
сканирования (в некоторых прикладных задачах)
27
Международная лаборатория «Сенсорика»,
ИПМ им.М.В.Келдыша РАН
Коррекция геометрического шума в
СТЗ со сканирующей линейкой
фотодатчиков методом отслеживания
строк подвижного изображения
ВОПРОСЫ ?
Андреев Виктор Павлович
Москва, 2011г.
28