ОБРАБОТКА ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ В ИНТЕРЕСАХ РЕШЕНИЯ ЗАДАЧ УПРАВЛЕНИЯ
реклама

ОБРАБОТКА ПОСЛЕДОВАТЕЛЬНОСТИ
ИЗОБРАЖЕНИЙ В ИНТЕРЕСАХ
РЕШЕНИЯ ЗАДАЧ УПРАВЛЕНИЯ
ПРОЦЕССОМ ПОСАДКИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В. А. ГРИШИН
Федеральное государственное унитарное предприятие
“Научно-производственный центр автоматики и
приборостроения имени академика Н. А. Пилюгина”
Институт Космических Исследований
СТЗ в управлении ЛА
Решаемые задачи:
• Инспекция поверхности
• Навигация по полю рельефа (яркости), заданным
ориентирам
• Наведение
• Измерение вектора параметров движения ЛА
Методы решения:
• Построение 3D модели поверхности
• Анализ текстуры, теней
• Распознавание заданных объектов, форм рельефа,
ориентиров
Посадка ЛА в атмосфере
Классический маневр
«коробочка».
Автоматическая посадка:
1. Инспекция участка
местности.
2. Расчет и реализация
посадочного маневра.
Возможна посадка на
необорудованные
площадки
Посадка с орбиты
1. Инспекция подстилающей
поверхности.
2. Выбор участка, пригодного
для посадки.
Расчет и реализация
посадочного маневра (возможна
коррекция траектории в
процессе посадки).
Коррекция навигационных ошибок
1. Пролет ЛА над участком
коррекции.
2. Уточнение положения в
пространстве.
3. Расчет и реализация
корректирующего маневра,
обеспечивающего
поражение цели.
Построение 3D модели поверхности
•
•
•
•
•
Преимущества построения геометрической модели
наблюдаемой сцены посредством СТЗ:
Более высокое пространственное разрешение построенных
моделей по сравнению с радиолокационными системами
Большая устойчивы к помехам, как естественного
происхождения, так и искусственного
Простота
Сравнительно малые габариты
Сравнительно малое энергопотребление СТЗ
Недостатки:
• Сравнительно большие вычислительные затраты
• Необходимость внешнего освещения
• Влияние атмосферы (среды распространения излучения)
Упрощающие предположения
• Изменение разрешения оптической системы (объектива)
по полю кадра практически отсутствует
• Геометрические искажения оптической системы
отсутствуют (скомпенсированы при предварительной
обработке изображений)
• Оптическая система откалибрована при изготовлении и
погрешность калибровки пренебрежимо мала
• Погрешность определения положения камеры в
пространстве в моменты визирования пренебрежимо
мала
Упрощающие предположения
• Погрешность определения угловой ориентации камеры в
моменты визирования пренебрежимо мала
• Интервал съемки стремится к нулю, так что сдвига
изображения, обусловленного движением объекта в
процессе съемки, практически не возникает
• Погрешность установления соответствия точек
подстилающей местности на последовательности кадров
распределена по нормальному закону, параметры
которого неизменны как по площади каждого отдельно
взятого кадра, так и для последовательности кадров
Факторы, влияние которых
оценивается
• Ориентация оси камеры относительно поверхности
Земли
• Поле зрения камеры (фокусного расстояния)
• Количество кадров визирования каждой точки
поверхности
• Точность установления соответствия точек на
последовательности кадров
Описание процесса съемки
Оценка погрешностей реконструкции
Точка на подстилающей поверхности:
X ,Y , Z
Координаты проекций этой точки на плоскость ПЗС матрицы
на k кадрах:
xi0 i ( ), yi0 i ( ), i 1,2...k
Модель точности установления соответствия точек на
последовательности кадров:
2
2
~
~
x
y
~
~
i
i
, i 1,2...k
Pi ( xi , yi )
exp
2
2
2
2
1
Оценка погрешностей реконструкции
Случайный вектор измерений имеет вид:
x x0 ~
x , y y0 ~
y , i 1,2...k
i
i
i
i
i
i
Используем метод максимального правдоподобия для оценки
координат визируемой точки:
( X ,Y , Z )
Функция правдоподобия имеет вид:
L( ) Wk ( x1 , x2 ... x , y1 , y ... yk | )
k
1 k
1
2
2
L( ) 2 k
exp
xi i yi i
k
2
2
i 1
2 i 1
Оценка погрешностей реконструкции
Логарифм функции правдоподобия:
k
ln L( ) ln Wk ( x1 , x2 ... x , y1 , y ... yk | ) ln Li ( xi , yi | )
i 1
ln L ln 2 k 2
k
1 k
xi i
2
2 i 1
yi i 2
2
i 1
Искомый вектор:
k
arg max ln Li ( xi , yi | )
i 1
k
arg max xi i 2 yi i 2
i 1
k
Оценка погрешностей реконструкции
Найдем вторые производные для определения элементов
информационной матрицы Фишера:
2
ln L
i j
2
l
l 1 i
k
1
1
l 2
i
2
1
2 xl l
l
2
l 1
i j
1
k
l
l
l 1 i
i
k
2
yl l
l
l 1
i j
k
Оценка погрешностей реконструкции
Элементы информационной матрицы Фишера:
2
I ij E
ln L
i j
2
ln L
i j
X 2k
L( ) dX ,
Где E{•} - символ математического ожидания
После интегрирования все члены, содержащие вторые
производные, оказываются равными нулю. Члены,
содержащие произведения производных первого порядка,
выносятся из-под знака интеграла. Сами интегралы равны 1
(по свойству нормировки функции плотности вероятности).
В итоге получаем элементы информационной матрицы
Фишера:
Оценка погрешностей реконструкции
1 k
1 k
I ij 2
l
l 2 l
l
l 1 i
j
j
l 1 i
Ковариационная матрица ошибок оценивания оценивается
снизу матрицей:
I11 I12 I13
J I 21 I 22 I 23
I I I
32
33
31
1
Оценка погрешностей реконструкции
Дисперсии ошибок оценивания координат оцениваются
снизу в соответствии с неравенствами Крамера-Рао:
2
E X X J11
2
E Y Y J 22
2
E Z Z J 33
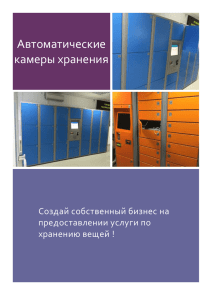
Базовый набор параметров
• Разворот оси камеры относительно горизонтальной
плоскости - 67,5
• Поле зрения камеры в горизонтальной плоскости - 63,7,
в вертикальной плоскости - 45
• Среднеквадратическое отклонение (СКО) ошибки
установления соответствия точек - 3' угловых минуты
(предполагается, что визирование точки осуществляется
с субпиксельным разрешением)
• Высота полета - 10000 м.
• Количество кадров визирования точки - 5
В таблицах приведены максимальные ошибки в
полосе обзора
Результаты моделирования
Результаты моделирования
Результаты моделирования
Результаты моделирования
Погрешность реконструкции по
координате X
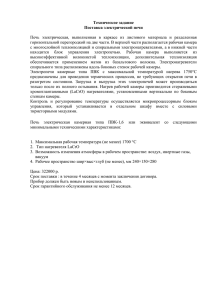
Погрешность реконструкции по
координате Y
Погрешность реконструкции по
координате Z
Выводы
• Системы технического зрения ЛА способны восстанавливать
трехмерную структуру наблюдаемой сцены с достаточно
высокой точностью (порядка 10-3 от расстояния до сцены)
• Информация о трехмерной структуре сцены существенно
облегчает решение задач распознавания наблюдаемых
объектов и, соответственно, задач навигации ЛА и задачи
управления процессом посадки ЛА
• Целесообразность оснащения систем автономного
искусственного интеллекта системами технического зрения с
возможностями 3D реконструкции окружающих объектов
Методы навигации и измерения
вектора параметров движения ЛА
Классификация методов навигации и измерения
Навигация:
• По профилю подстилающей местности
• По наблюдаемым ориентирам
Определение параметров движения:
• Использование структурированного освещения
• Визирование посадочного (стыковочного) знака
• Анализ динамики изображения поверхности
Навигация по заданным ориентирам
Шаблоны расположения
ориентиров в полосе просмотра
Навигация по заданным ориентирам
Высота полета 10000 м.
Среднеквадратическое отклонение (СКО) ошибки визирование
ориентиров - 3' угловых минуты
Визирование стыковочного
(посадочного) знака
Определение угловых и
линейных координат объекта
относительно посадочного
(стыковочного) знака
Точность измерения углов 0,2° 0,3°
Точность измерения линейных
координат - порядка 10-3 от
расстояния до поверхности
Отрабатывалось для условий стыковки с подводным аппаратом
Рабочая дальность - 2-3 метра
Использование структурированного
освещения
Определение угловых
координат объекта и
расстояния относительно
поверхности
Точность измерения углов 1,2° 4,3°
Точность измерения расстояния
- порядка 0.1 *10-3 - 0.2 *10-3 от
расстояния до поверхности
Точность зависит от числа
излучателей подсвета
Измерение вектора параметров по
динамике изображения поверхности
Особенность: Автоматический выбор некоторого множества
ориентиров и отслеживание их на последовательности
кадров.
Измеряемые параметры:
• Расстояние до поверхности и радиальную скорость
• Перемещения в плановой системе координат и скорости этих
перемещений
• Угол между оптической осью TV камеры и нормалью к
поверхности
• Угловые перемещения камеры и скорость этих перемещений
Пример практического использования
СТЗ для управления ЛА
TLAMS - Tomahawk LAND Attack Missile (Raytheon
System Company) стандарт Block IIIc
Система DSMAC (Digital Scene Matching Area Correlator)
В состав системы входит телекамера, осуществляющая
мониторинг ландшафта в процессе наведения на цель.
Точность 20-30 м.