ОПТИМИЗАЦИЯ ПЕРЕЛЕТОВ С МАЛОЙ ТЯГОЙ В ЗАДАЧЕ ТРЕХ ТЕЛ А. Суханов
реклама

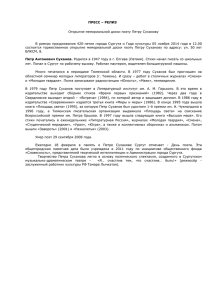
28 сентября 2006 г. ОПТИМИЗАЦИЯ ПЕРЕЛЕТОВ С МАЛОЙ ТЯГОЙ В ЗАДАЧЕ ТРЕХ ТЕЛ А. Суханов ИКИ РАН [email protected] [email protected] Метод транспортирующей траектории (МТТ) В.В. Белецкий, В.А. Егоров, Межпланетные полеты с двигателями постоянной мощности, Космические исследования, 1964, № 3 Метод приближенной оптимизации перелетов с идеально регулируемой малой тягой между двумя заданными положениями, основанный на линеаризации траектории перелета около некоторой опорной кеплеровской орбиты (транспортирующей траектории). • Орбитальная система координат • Постоянная мощность тяги • Решение частично в квадратурах • Приемлемая точность только при небольшой угловой дальности Модифицированный МТТ • • • • • • • • • Инерциальная система координат Полностью аналитическое решение для постоянной мощности Решение в квадратурах для произвольного закона изменения мощности Ненулевые концевые смещения транспортирующей траектории, повышающие точность аппроксимации Возможность частично заданных граничных условий Перелеты с большой угловой дальностью (включая многовитковые орбиты) Возможность получения любой требуемой точности вычислений Возможность облета нескольких небесных тел Применение при линейных ограничениях на направление тяги А.А. Суханов, Оптимизация перелетов с малой тягой, Космические исследования, 1999, № 2 А.А. Суханов, Оптимизация межпланетных перелетов с малой тягой, Космические исследования, 2000, № 6 А.А. Суханов, А.Ф.Б. де А. Прадо, Модификация метода транспортирующей траектории, Космические исследования, 2004, № 1 А.А. Суханов, А.Ф.Б. де А. Прадо, Оптимизация перелетов при ограничениях на направление тяги, Космические исследования (в печати) МТТ в произвольном поле сил x f x, t g x(t0) = x0 , – уравнение движения, g = {0, } x(tк) = xк – граничные условия y(tк) = yк граничные условия на транспортирующей траектории – решение уравнения x f x, t y = y(t) y(t0) = y0 , – вектор реактивного ускорения КА (тяга) х=у+ ξ Fξ g (t0) = x0 – y0 = 0 , (tк) = xк – yк = к t ξ ξt Φt , t0 ξ 0 Φt , g d t0 F f y Φ Φt , t0 y t y t0 FΦ матрица изохронных производных, Φ МТТ в произвольном поле сил Δ Ψ êξ ê ξ 0 t S St 0 , t Ψ v Ψ Tv dt, S ê St 0 , t ê t0 α = Ψ Tv S ê1Δ x y Φ ξ 0 S S ê1Δ Ψ Ψt , t0 Φt0 , t Φ 1 t , t0 ΨF сопряженная матрица, Ψ Ψ Ψr Ψv N = N0 мощность, = (r, t), (r0, t0) = 1 Свойства: • Матрица S = S(t, t + t) является невырожденной положительно определенной для любых значений t и t > 0 • Оптимальная тяга может обращаться в нуль лишь в изолированных точках, причем в этих точках знак тяги меняется на противоположный (т.е. эти точки являются точками переключения) и число таких точек конечно Обеспечение любой заданной точности Интервал времени полета разбивается на n подынтервалов и МТТ применяется к каждому подынтервалу в отдельности. Проблема заключается в нахождении граничных условий 1, ..., n1 для подынтервалов. Ξ ξ1 ,...,ξ n1 вектор размерности 6n 6 Ξ D1 d D1 E T 2 0 D . . . 0 E2 D2 0 E3 . . . . . . E 3T D3 . . . . . . . . . . . D n 3 E n2 Dn2 E Tn 1 . . . E Tn 2 . . . 0 . . 0 E n 1 D n 1 0 . симметричная матрица порядка 6n 6 Di, Ei матрицы 6-го порядка, вычисляемые на i-м подынтервале Достижение любой заданной точности Ξ D1d, Ξ ξ1 , ..., ξ n1, ξ i ρi , ηi Ограничения на направление тяги B = B(x, t) матрица ранга 1 или 2 B = 0 P I BT BBT 1 tк B S к Ψ v P Ψ Tv dt t0 α = P Ψ Tv S ê1Δ проективная матрица Способы вычисления необходимых компонентов Задача двух тел • Матрицы , вычисляются аналитически • Матрица S вычисляется аналитически или в квадратурах • Транспортирующая траектория: кеплеровская орбита, найденная путем решения задачи Ламберта Произвольное поле сил • Матрицы , вычисляются численным интегрированием уравнений в вариациях совместно с уравнениями движения • Матрица S вычисляется в квадратурах • Транспортирующая траектория является решением краевой задачи Основным препятствием на пути применения МТТ в произвольном поле сил является проблема нахождения транспортирующей траектории заданного типа Пример множественности решений Решение краевой задачи в произвольном поле сил • Задаются характерные образцы орбит разных типов (исходные орбиты) • Применяется некая пошаговая математическая процедура перехода от исходной орбиты к орбите между двумя заданными положениями с заданным временем перелета Модель движения Хилла Уравнения движения: r v, v 2Nr 2Mv r 3 r 3 0 0 0 1 0 N 0 0 0 , M 1 0 0 0 0 1 0 0 0 0 a3 2 Коллинеарные точки либрации L1 и L2: rL = {xL, 0, 0}, x L 1 3 3 a 3 = 1496.5610 км для с.-з. системы 0 Матрица изохронных производных Ф: 0 I rr T F , F 2 , G 3 3 2 I r r N G 2M Исходные орбиты в модели движения Хилла Тип орбиты Тип Число перелета витков EE 0 1 2 y y L1 L2 x L1 y EL 0 x 0 L1 L2 L1 x L1 L2 x 1 L1 x L1 x L1 7 8 9 – – – – – – – y y x – – – – – x – – – – – y y y y y L2 L1 x x L1 L2 y L2 L1 x L1 L2 x L2 L1 x L1 x L1 L2 x L1 y L2 x x x L1 x L1 L2 x L1 y x L2 L1 L2 x L1 y L1 y L2 L2 y L2 L1 y L2 L2 y y y L2 6 y L2 L1 y 2 x y L2 5 y L2 L1 4 L1 y y LL x y y 0 L2 L1 y LE x y L2 L1 L2 3 x L1 x L1 y L2 x L1 y L2 x L1 L2 x L1 y x L2 L1 y L2 L2 L1 x y L2 x x L2 L1 y x L2 L2 y L2 x L1 x L2 Демонстрация метода Перелет Земля гало-орбита y 2E-006 Ãàëî î ðáèòà L1 Ï åðåëåò ñ ì àëî é òÿãî é x Çåì ëÿ -1000 Ï àññèâí û é ï åðåëåò Ðåàêòèâí î å óñêî ðåí èå, g 1000 1E-006 0E+000 0 -1000 z Ãàëî î ðáèòà x -1000 Çåì ëÿ Ï åðåëåò ñ ì àëî é òÿãî é -600 150 • Относительная ошибка минимизируемого функционала < 0,002 достигается при n = 22 Ï àññèâí û é ï åðåëåò L1 100 Âðåì ÿ ï î ëåòà, ñóòêè Ñî ëí öå 600 50 • Плохая сходимость при 7 n 20 200 Перелет между гало-орбитами y Ï àññèâí û é ï åðåëåò L1 Ãàëî î ðáèòà -1000 600 Çåì ëÿ L2 1000 Ï åðåëåò ñ ì àëî é òÿãî é x Ãàëî î ðáèòà -600 Ñî ëí öå 600 z Ï àññèâí û é ï åðåëåò Ðåàêòèâí î å óñêî ðåí èå, g 4E-006 3E-006 2E-006 1E-006 0E+000 0 L1 Ãàëî î ðáèòà -1000 L2 1000 Ï åðåëåò ñ ì àëî é òÿãî é -600 x Ãàëî î ðáèòà • Относительная ошибка минимизируемого функционала < 0,002 достигается при n = 35 • Плохая сходимость при n 15 50 100 150 Âðåì ÿ ï î ëåòà, ñóòêè 200 Характеристики перелетов J минимизируемый функционал N0 начальная мощность ~ N 0 N 0 m0 J mðò ~ m0 N0 J Ограничение на направление тяги: тяга ортогональна направлению на Солнце Земля – L1 L1 – L2 0,15 0,15 J, м2/с3 0,00168 0,00291 v, м/с 230 292 mрт/m0 0,011 0,019 1600 – 5000 800 – 7700 Земля – L1 L1 – L2 0,1 0,2 J, м2/с3 0,00212 0,00732 v, м/с 243,4 453,4 m рт /m 0 0,042 0,073 800 – 8000 500 – 6500 ~ N 0 , Вт/кг Диапазон изменения Iуд, с ~ N 0 , Вт/кг Диапазон изменения Iуд , с