ЕЛГОНДИНА М.Б., АЛИПБАЕВ К.А.,ТОРЫБАЕВ Б.С., РАЗРАБОТКА ПРОГРАММНО-МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ СИСТЕМ ОРИЕНТАЦИИ CANSAT
реклама

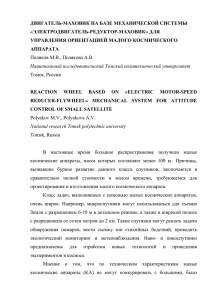
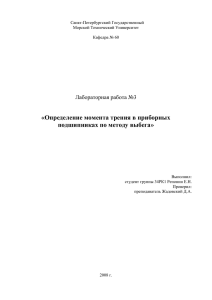
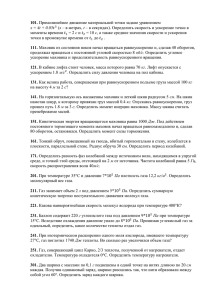
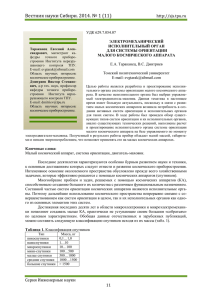
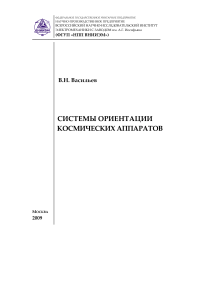
ЕЛГОНДИНА М.Б., АЛИПБАЕВ К.А.,ТОРЫБАЕВ Б.С., РАЗРАБОТКА ПРОГРАММНО-МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ СИСТЕМ ОРИЕНТАЦИИ CANSAT 1 Введение В течение последних десяти лет в мире развивается научно-образовательный проект СanSat. Выполняя я должен разработать, спаять, запрограммировать, испытать и запустить с помощью специальной ракеты на высоту 1-2 км действующую модель «спутника». После чего «спутник» за время спуска на парашюте должен выполнить обязательную научную программу, которая заложена в базовый конструктор, и дополнительную, которую сам задаю. Вся начинка «спутника» должна вмещаться в банку объёмом 0,33 мл. Проект решает актуальную проблему соединения науки и образования, сделав космическую тему привлекательной для талантливых. Несмотря на «несерьёзные» размеры, «спутники» CanSat представляют собой многофункциональные устройства со всеми системами, присущими настоящему космическому аппарату: приёмник, передатчик, система сбора и обработки информации (бортовой компьютер), научная нагрузка, система спасения. Современные системы управления космического аппарата базируются на выборе адекватных математических моделей, соответствующих его типу, применении современных численных методов и построении алгоритмов, реализуемых в виде программного обеспечения, позволяющего решать следующий ряд задач: обработка поступающей информации, анализ законов движения центра масс космического аппарата и его движения вокруг центра масс, реализация законов управления, формирование управляющих сигналов и многие другие. От работы системы управления зависит работа всех остальных подсистем космического аппарата, а также качество выполняемых работ, обусловленных полезной нагрузкой аппарата. В связи с тем, что, практически, перед каждым космическим аппаратом ставятся специфические конкретные цели и задачи, система управления для каждого аппарата, несмотря на обязательные элементы конструкции, разрабатывается индивидуально под соответствующее назначение. В связи с этим разработано и запатентовано огромное количество систем управления движением, специализированных для КА различного назначения. Несмотря на такое многообразие можно отметить, что все системы управления движением КА в основном состоят из следующих функционально отличающихся групп приборов: датчик, позволяющих определять положение КА в пространстве и характер его движения (гироскопические датчики); исполнительных органов (инерционные исполнительные органы -маховики, электромагнитные исполнительные органы, и т.д.), изменяющих движение КА. 2 Общая характеристика работы. Цель и задачи работы: Цель настоящей работы является разработка математических, численных методов и комплексов алгоритмов системы управления движением пикоспутника CanSat. Разработка системы управления включает следующие задачи: обеспечение трёхосной активной ориентации; установление безопасного режима (гашение угловой скорости, ориентация пикоспутника); обеспечение съёмки с тангажным замедлением; Задача проекта. Разработать ПМО системы ориентации и стабилизации пикоспутника CanSat. Методы исследования. При решении задач, необходимых для достижения поставленных целей, использовались следующие методы: аналитические методы; качественные методы; численные методы; методы небесной механики; методы компьютерного моделирования. Новизна работы. Программно-математический модель расчета системы ориентации и стабилизации движения пикоспутника CanSat относительно центра масс. Теоретическая и практическая значимость исследования. Теоретическая значимость работы заключается в разработке оригинального программноматематического обеспечения решения задач анализа движения пикоспутника CanSat с определённой миссией и его системы управления. 3 Анализ миссии Cansat Рисунок-1 Схема деления спутника 4 Модель системы ориентации пикоспутника Система ориентации предназначена для управления угловым движением КА, т.е. для придания его осям определённого положения относительно заданных направлений. Для пикоспутника характерна орбитальная ориентация, при которой одна из осей - ось курса постоянно направлена к центру Земли, вторая - ось тангажа перпендикулярна плоскости орбиты, а третья - ось крена лежит в этой плоскости. По числу ориентированных осей пикоспутника различают одноосную ориентацию, при которой поддерживается определённое угловое положение одной из его осей относительно заданного направления, и полную ориентацию, когда определённое угловое положение придаётся всем трём осям пикоспутника. Рисунок-2 Обобщённая схема системы ориентации пикоспутника 5 Исполнительные органы системы ориентации Системы управления угловым движением пикоспутника (системы ориентации и стабилизации) является наиболее сложной и ответственной частью бортовой аппаратуры. Эффективность применения пикоспутника и, следовательно, эффективность решаемых ими практических задач существенным образом зависит от функциональных возможностей этих систем, а также их технических и эксплуатационных характеристик. Одним из важных элементов системы управления угловым движением пикоспутника являются их исполнительные органы. 5.1 Модель инерционного исполнительного органа - маховика Маховики – это вращающиеся инерционные устройства, применяемые для высокоточной ориентации и стабилизации пикоспутника. Работа маховиков основана на законе сохранения кинетического момента. Управляющий момент создаётся за счёт динамической реакции, возникающей при разгоне или торможении маховика. Когда маховик раскручивается в одну сторону, то пикоспутник, соответственно, начинает крутиться в другую сторону. Например, если под влиянием внешних факторов пикоспутника начал разворачиваться в определённом направлении, достаточно увеличить скорость вращения соответствующего маховика в ту же сторону, чтобы он скомпенсировал момент («принял вращение на себя») и нежелательный поворот пикоспутника прекратится. Рисунок-3 Система ориентации с помощью маховиков, где 1 - электродвигатель; 2 - маховик; 3 – подшипник Момент инерции 𝐽м маховика зависит от его конструктивного исполнения. В случае, если маховик представляет собой полый толстостенный цилиндр, его момент инерции определяется формулой: 𝑚 (𝑟 2 +𝑟 2) 𝐽𝑚 = 𝑀 𝑀 𝑂𝑀 , 2 Где 𝐽𝑚 - момент инерции цилиндра, кг ∙ м2 ; 𝑚𝑀 - масса полого цилиндра, кг; 𝑟𝑀 - внешний радиус цилиндра, м; 𝑟𝑂𝑀 -внутренний радиус цилиндра, м. Для тонкостенного цилиндра: 𝐽𝑚 = 𝑚𝑀 𝑟𝑀 2 (2) и для сплошного цилиндра: (1) 𝑚 𝑟 2 𝐽𝑚 = 𝑀 𝑀 (3) 2 Рассмотрим уравнения движения пикоспутника, на котором установлен маховик, как показано на рисунке 3. Для этого введём следующие системы координат (рисунок 5): 1. 𝐺𝑋𝑌𝑍 - инерциальная геоцентрическая система координат, оси которой ориентированы неподвижно в инерциальном пространстве. Ось 𝐺𝑍 направлена в северный полюс Земли, ось 𝐺𝑋 направлена в точку весеннего равноденствия, а ось GY дополняет систему до правой; 2. 𝑂𝑥0 𝑦0 𝑧0 −система координат, начало которой находится в центре масс космического аппарата, а её оси параллельны осям системы координат 𝐺𝑋𝑌𝑍; 3. 𝑂𝑥𝑦𝑧 −подвижная, связанная система координат, начало которой находится в центре масс космического аппарата, а её оси направлены по главным центральным осям инерции космического аппарата. Рисунок-5 Системы координат, используемые для описания ориентации космического аппарата Используя динамическое и кинематическое уравнение Эйлера для 1-го маховика мы находим угловые скорости маховика На основе математической модели разработан алгоритм определения управляющего вращающего момента маховика, который представлен в виде блоксхемы, приведённой на рисунке 6. Ниже приведено описание основных блоков алгоритма: Рисунок-6 Алгоритм определения управляющего момента маховика 6 Численная реализация Начальные условии: Для обеспечения систему ориентацией и стабилизацией мы использовали маховики-двигатели. Для маховика: 𝑚𝑀 = 45гр = 0.045кг , 𝑟𝑀 = 2.5 см = 0,025м, ℎ𝑀 = 4мм = 0,004м Для пикоспутника:𝑚𝑠𝑎𝑡 = 300гр = 0.3кг , 𝑟𝑠𝑎𝑡 = 5 см = 0,05м, ℎ𝑠𝑎𝑡 = 12см = 0,12м Рисунок-7 Графики изменения углового положения пикоспутника без управления в результате воздействия внешних сил Рис. 8 Графики изменения углового положения пикоспутника при наличии управления с помощью маховика 6 Заключение Входе исследовании мы узнали несмотря на «несерьёзные» размеры, «спутники» CanSat представляют собой многофункциональные устройства со всеми системами, присущими настоящему космическому аппарату: приёмник, передатчик, система сбора и обработки информации (бортовой компьютер), полезная нагрузка(видеокамера), система спасения. Литература 1. Алипбаев К. А. Разработка системы управления движением микроспутника.//, 2013 г.-с. 5-26, 30-78. 2. Белецкий В.В. Движение искусственного спутника относительно центра масс. – М: Наука. Гл. ред. физ.-мат. лит.,1965. – 416 c 3. Fredrik Bajers CanSat Ground Station// Electronic’s &IT