двигатель-маховик на базе механической системы
реклама

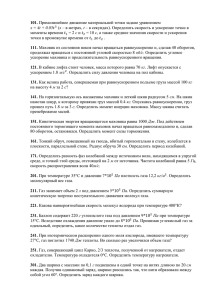
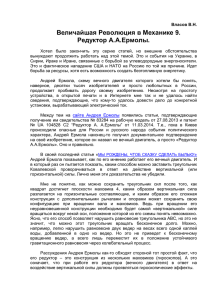
ДВИГАТЕЛЬ-МАХОВИК НА БАЗЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ «ЭЛЕКТРОДВИГАТЕЛЬ-РЕДУКТОР-МАХОВИК» ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ МАЛОГО КОСМИЧЕСКОГО АППАРАТА Поляков М.В., Полякова А.В. Национальный исследовательский Томский политехнический университет Томск, Россия REACTION WHEEL BASED ON «ELECTRIC MOTOR-SPEED REDUCER-FLYWHEEL» MECHANICAL SYSTEM FOR ATTITUDE CONTROL OF SMALL SATELLITE Polyakov M.V., Polyakova A.V. National research Tomsk polytechnic university Tomsk, Russia В настоящее время большое распространение получили малые космические аппараты, масса которых составляет менее 100 кг. Причины, вызвавшие бурное развитие данного класса спутников, заключаются в сравнительно низкой стоимости и малом времени, требующемся для проектирования и изготовления малого космического аппарата. Класс задач, выполняемых с помощью малых космических аппаратов, очень широк. Например, микроспутники могут использоваться для съемки Земли с разрешением 6-10 м в детальном режиме, а также в широкой полосе с разрешением от сотен метров до 2 км. Такие спутники могут решать задачи обнаружения пожаров, вести съемку зон стихийных бедствий, проводить экологический мониторинг и метеонаблюдения. Нано- и пикоспутники предназначены для отработки новых технологий и проведения экспериментов в космосе. Мнение о том, что по техническим характеристикам малые космические аппараты (КА) не могут конкурировать с большими, было опровергнуто в 1999 году американским КА Ikonos-2 массой 720 кг. Бортовая аппаратура спутника позволяла получать изображения поверхности Земли с разрешением около 1 метра и точностью привязки координат от 2-3 до 10-12 метров. Ранее такие параметры обеспечивались лишь большими КА массой 6-8 т. Рисунок 1 – Космический аппарат Ikonos-2 Одной из основных бортовых систем КА является система ориентации (СО), обеспечивающая определенное положение корпуса КА в пространстве. В качестве исполнительных органов (ИО) системы ориентации в настоящее время наибольшее распространение получили двигатели- маховики (ДМ) и силовые гироскопические устройства. В литературе такие исполнительные органы носят название электромеханических (ЭМИО). Двигатели-маховики преимущественно применяются для управления ориентацией малоразмерных КА, масса которых составляет менее 500 кг. ДМ представляет собой электрический двигатель, на валу которого установлен массивный маховик. Управление ориентацией КА осуществляется в соответствии с законом сохранения кинетического момента: упр = Ω =∙ = ∙ ɛ (1) где – кинетический момент ЭМИО; – момент инерции маховика; Ω – угловая скорость вращения маховика; ɛ – угловое ускорение, развиваемое электродвигателем. Недостатками такого типа исполнительных органов является: • постоянное потребление электроэнергии, что приводит к необходимости увеличения площади солнечных батарей; • при совпадении угловой скорости вращения ДМ с собственными частотами элементов его конструкции происходит явление резонанса (рисунок 2). Рисунок 2 – Вибрационная характеристика ДМ (1 – идеализированная; 2 –реального ДМ) • для улучшения массогабаритных характеристик при заданной величине кинетического момента двигателя-маховика, в соответствии с формулой (2) необходимо увеличивать угловую скорость вращения маховика = ∙ Ω(2) Увеличение угловой скорости вращения маховика приводит к уменьшению ресурса шарикоподшипников, а, следовательно, и всего двигателя-маховика. • Необходимость в системе разгрузки для возвращения величины угловой скорости вращения маховика с максимального значения в зону рабочих скоростей. В проводимой работе рассматривается новая модификация электромеханического исполнительного органа системы ориентации малого космического волнового аппарата, состоящего из микроэлектродвигателя (ЭД), редуктора и установленного на его выходном валу маховика (рисунок 3). В отличие от эксплуатируемых исполнительных органов на базе электродвигателей-маховиков, у которых маховик установлен непосредственно на валу электродвигателя и вращается с угловой скоростью до нескольких тысяч оборотов в минуту, угловое движение маховика осуществляется через волновой редуктор и имеет рабочую угловую скорость, не превышающую сотен оборотов в минуту. Рисунок 3 – Структурная схема исполнительного органа (1 – маховик, 2 – волновой редуктор, 3 – микроэлектродвигатель) Циклограмма работы данного исполнительного органа представлена на рисунке 4. Рисунок 4 – Циклограмма работы исполнительного органа (ψ КА – угол отклонения космического аппарата При необходимости углового поворота космического аппарата вокруг центра масс для выполнения требуемых операций на микроэлектродвигатель исполнительного органа поступает сигнал, ЭД создает управляющий момент Мупр и начинает вращать маховик с постоянным угловым ускорением . Угловая скорость вращения маховика линейно возрастает, и по закону сохранения кинетического момента, корпус космического аппарата начинает вращаться в противоположную сторону. После совершения программного разворота, микроэлектродвигатель отключается, управляющий момент Мупр отсутствует. Волновой редуктор создает тормозной момент, который обеспечивает принудительное торможение маховика. При этом из-за торможения маховика положение спутника в пространстве незначительно меняется (рис.4). Трехмерная модель разработанного двигателя-маховика представлена на рисунке 5. Рисунок 5 – Трехмерная модель разработанного двигателя-маховика Рассматриваемый электромеханический исполнительный орган системы ориентации малого космического аппарата обладает определенными преимуществами в сравнении с эксплуатируемыми исполнительными органами на базе регулируемых по скорости электродвигателей-маховиков: 1. Увеличивается ресурс работы, т.к. исполнительный орган работает в зоне малых угловых скоростей, что существенно снижает износ шарикоподшипниковых опор. 2. Не требуется система разгрузки исполнительных органов. 3. Уменьшается потребление мощности. 4. Упрощается блок управления исполнительным органом. 5. Повышается общая надежность системы «исполнительный орган – блок управления». Рассматриваемая модификация электромеханического исполнительного органа эффективна при использовании для системы ориентации существенная малых космических минимизация аппаратов, для которых массогабаритных электропотребления и управляющих моментов. требуется параметров,