ЙЕ НАУНГ Научный руководитель – А.В. ЩАГИН, д.т.н., профессор РЕЖИМЫ РЕГУЛИРОВАНИЯ СЕРВОПРИВОДОВ
реклама

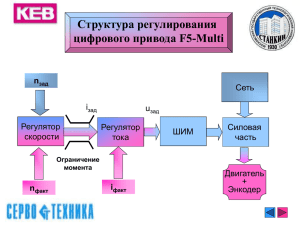
ЙЕ НАУНГ Научный руководитель – А.В. ЩАГИН, д.т.н., профессор Национальный исследовательский университет «МИЭТ» РЕЖИМЫ РЕГУЛИРОВАНИЯ СЕРВОПРИВОДОВ НА ВЫСОКОТОЧНЫХ СИСТЕМ ПОЗИЦИРОВАНИЯ С развитием производства и появлением новых технологий ужесточаются требования, предъявляемые к сервоприводам. Современные технологические процессы требуют разработки сервоприводов, имеющих повышенное быстродействие, точность и способность быстрой адаптации к изменению режимов работы. В современном производстве к сервоприводу предъявляются высокие требования по следующим параметрам: точность позиционирования, диапазон регулирования, неравномерность частоты вращения, перегрузочная способность. Во многих применениях электрический сервопривод используется для регулирования положения. Для получения хороших динамических характеристик регуляторы скорости и тока подчинены регулятору положения, при этом регулятор положения выполнен как чисто пропорциональный регулятор. Наличие интегрирующей части приводило бы к недопустимому перерегулированию при подходе к точке позиционирования. Интегральная часть подчиненного регулятора скорости служит для того, чтобы уменьшить статическую ошибку регулирования. Регулирование скорости состоит из контура скорости с включенным на входе блоком ограничения, с помощью которого поступающий задающий сигнал ограничивается значением, соответствующем максимальной скорости. Когда привод достигает максимальной скорости, он поддерживает ее. Если двигатель перегружен, то ток достигает значения ограничения и привод не увеличивает скорость до заданного значения. В режиме регулирования момента скорость в нормальном случае не достигает значения nmax, так как работает ограничение тока. Установившийся ток соответствует сигналу задания тока. Двигатель при этом работает в режиме регулирования момента. Если момент нагрузки недостаточен, чтобы достигнуть задания тока, двигатель ускоряется до скорости nmax. Список литературы 1. Л.С. Удут, Н.В. Гусев, М.А. Нечаев Исследование синхронного следящего электропривода на базе сервопривода «MINAS A4» и контроллера движения «PCI-Servo-4». 2. Сервоприводы. Основы, характеристики, пректирование. Издание подготовлено на основе документа SEW-EURODRIVE "Drive Engineering - Practical Implementation. Volume 7. Servo Drives. Basics, Charasterics, Project planning", 0922 4610/1196.