Н.В. КУЗНЕЦОВ Научный руководитель – Д.М. МИХАЙЛОВ, к.т.н
реклама

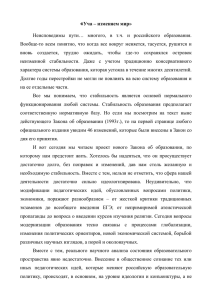
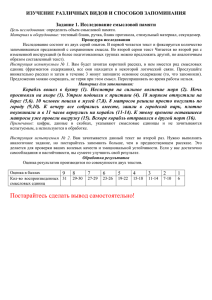
Н.В. КУЗНЕЦОВ Научный руководитель – Д.М. МИХАЙЛОВ, к.т.н., доцент Национальный исследовательский ядерный университет «МИФИ» ПРИКОРМОЧНЫЙ АВТОМАТИЗИРОВАННЫЙ РЫБАЦКИЙ КОРАБЛЬ ВТОРОГО ПОКОЛЕНИЯ С ЭХОЛОТОМ «РЫБАК» Рынок профессиональных принадлежностей для рыбалки в настоящее время развивается бурными темпами. В след за профессиональными удилищами и прикормкой на рынке растет необходимость в инновационных средствах обнаружения рыбных мест. Для этих целей разрабатывается прикормочный автоматизированный рыбацкий корабль второго поколения с эхолотом «Рыбак». «Рыбак» позволяет быстро, безопасно и экологично организовывать кормежку рыб в любых необходимых местах. Корабль автоматически передвигается по водоему по навигации ГЛОНАСС. Специально разработанный эхолот дает кораблю возможность обнаруживать с помощью ультразвука всевозможные препятствия, мели, скопления рыб и автоматически избегать столкновения с ними. Корабль выбирает оптимальное место для заброса удочки и осуществляет прикормку. В настоящее время на рынке оборудования для рыбалки возникает спрос на специальный прикормочные корабли с эхолотами. Такие инновационные средства рыбной разведки могут не только увеличить улов за счет того, что точечно доставят приманку-подкормку, но и за счет того, что сделают это в то место, где есть скопление рыбы [1]. Прикормочный дистанционно управляемый корабль с эхолотом может передвигаться либо на основе ручного управления с помощью пульта дистанционного управления, либо с помощью специальной интеллектуальной бортовой системы, использующей ГЛОНАССпередатчик. На основе полученных данных корабль по GSM-модему может загружать карту местности, определять берега водоема, а также использовать установленный на борту эхолот для корректировки курса [2]. Благодаря этому эксплуатация устройства возможна в сложных погодных условиях, в труднодоступных локациях и условиях плохой видимости, что позволяет значительно облегчить, обезопасить и повысить производительность таких работ, как: разведение рыб, рыбная ловля, исследования животного мира водоемов и др. Программное обеспечение на борту предназначено для автоматического построения траектории движении прикормочного дистанционно управляемого корабля с эхолотом. Программное обеспечение выполняет функции определения самого рыбного места за счет обработки данных с эхолота, определения оптимальной траектории движения, а также сбора статистики и информации о рыбалке. Также программное обеспечение выполняет функции удаленной передачи данных на пульт управления по радиоканалу. Основными частями бортового эхолота являются: - передатчик - усилитель - преобразователь (излучатель/приемник) Электрический импульс от передатчика преобразуется излучателем в звуковую волну, которая распространяется в водной среде. Встретив на своём пути препятствие, часть звуковой волны отражается и возвращается обратно к приемнику (рис.1). Приёмник преобразует отраженную звуковую волну в электрический импульс, который усиливается усилителем и выводится на экран. Измерив время между отправкой сигнала и возвращением отраженного эха, определяется и расстояние до отразившего волну объекта. Этот процесс многократно повторяется. Наиболее часто используется частота излучения - 192кГц. Эти частоты лежат в ультразвуковом диапазоне, и они не слышны ни человеку, ни рыбе, поэтому можно не бояться, что эхолот может распугать рыбу. Рис. 1. Принцип действия эхолота Глубину до дна эхолот рассчитывает, исходя из известной скорости звука в воде и измеренного им времени прохождения сигнала до препятствия и обратно. Список литературы 1. Долгов А.Н. и др. Многоцелевой малогабаритный комплекс для мелководья. Труды конференции ГА-2000. 2. Буров В.А. и др. Восстановление профиля донной поверхности с помощью модифицированных методов спектрального оценивания. Труды конференции ГА-2000.