Моделирование случайных процессов
реклама

Система
Системой называется совокупность объектов, функционирующих и
взаимодействующих между собой для достижения определенной цели.
Математическое описание
Система задается парой множеств U, Y и отношением SUY, где U –
множество входов, Y – множество выходов.
Пример 1:
Функция y=u2 может быть представлена как отношения между множествами
U=(-,+) и Y=[0,+), включающее все пары (u, y), для которых y=u2, т.е.
UY={(u, y): y=u2}.
Свойства системы
• Целостность:
•
•
Структурированность:
Целенаправленность:
Способы исследования систем
• Эксперимент с реальной системой
• Эксперимент с моделью системы
– Физическая модель
– Математическая модель
• Аналитическое решение
• Имитационное моделирование
Моделирование систем
Моделированием называется изучение системы по ее модели.
Моделью называется представление системы в форме удобной для ее
изучения.
Математической (концептуальной) называется абстрактная модель,
записанная на языке математики.
Аналитические модели
Аналитическими называются модели, использующие алгебраические,
дифференциальные и другие уравнения, а также предусматривающие
осуществление однозначной вычислительной процедуры, приводящей к их
решению.
Имитационные модели
Имитационными называются математические модели, воспроизводящие
алгоритм функционирования исследуемой системы путем
последовательного выполнения большого количества элементарных
операций.
Имитационное моделирование
• Определение системы
• Построение концептуальной модели
• Алгоритмизация модели
• Программирование модели
• Оценка адекватности модели
• Планирование экспериментов
• Экспериментирование
•
•
Интерпретация результатов
Документирование
Формальная модель системы
x(t ) [ x(t0 ), q (t ), u (t ), w(t ), t ],
y (t ) [ x(t ), q(t ), u (t ), w(t ), t ],
u : T U Rm , w : T W Rk ,
q : T Q R p , x : T X Rn ,
•
неточность математической модели;
неполнота информации о параметрах.
Математические схемы
• D-схемы – непрерывно-детерминированные модели
• F-схемы – дискретно-детерминированные модели
• P-схемы – дискретно-стохастические модели
• Q-схемы – непрерывно-стохастические модели
• N-схемы – сетевые модели
• A-схемы – комбинированные модели
y : T Y Rl , t T .
Непрерывно-детерминированные модели
Классификация моделей
• Статические и динамические модели
• Дискретные и непрерывные модели
• Детерминированные и стохастические модели
Статические и динамические
• Модель называется статической, если значение ее выхода y(t) в
момент времени t определяется только значением входа u(t) в тот же
момент времени, т.е. y(t)=S [u(t)].
• Модель называется динамической, если значение ее выхода y(t) в
момент времени t зависит от всего прошлого входного процесса u(t),
т.е. y(t)=S [u(s), s t ].
x(t ) f [ x(t ), u (t ), w(t ), t ],
y (t ) g[ x(t ), u (t ), w(t ), t ],
u : T U Rm , w : T W Rk ,
x : T X R n , y : T Y Rl ,
x(t0 ) x0 , t [t0 , T ).
Примеры систем
Дискретные и непрерывные
Модель системы называется дискретной или непрерывной по входам,
выходам и времени, если дискретным или непрерывным являются
множества входов, выходов и моментов времени соответственно.
Пример 3: T={0, 1, 2, 3, 4, 5, …}, T={x: x>0}
Пример 4: y(k+2)+a1y(k+1)+a0y(k)=u(k)
Детерминированные и стохастические системы
Детерминированной называется модель, значение выхода которой
однозначно определяется значением входного сигнала.
Причины возникновения неопределенностей:
•
погрешности и помехи измерений;
Дискретно-детерминированные модели
Конечным автоматом называется система S=<U, X, Y, f, g>, где U – входной
алфавит, X – внутренний алфавит, Y – выходной алфавит, f – функция
переходов, g – функция выходов.
Автомат Мили. f: UX X, g: UX Y.
Автомат Мура. f: UX X, g: X Y.
Непрерывно-стохастические модели
Пример системы
Таблица переходов
u0
u1
x0
x1
x0
x1
x1
x0
x0
u1,y1
u0,y0
u1,y0
Таблица выходов
u0
x0
y0
x1
y0
x1
u1
y1
y0
u0,y0
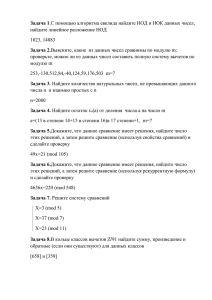
Дискретно-стохастические модели
Вероятностным автоматом называется система S=<U, X, Y, Р>, где U –
входной алфавит, X – внутренний алфавит, Y – выходной алфавит, Р –
множество вероятностей:
P(Xk=xj, Yk=yd / Xk-1=xi, Uk-1=us);
i, j {1,2,…,|X|}; d{1,2,…,|Y|};
s {1,2,…,|U|}.
p11
p12
0
P p21
0
p22
p32
p23 , pij P( X k x j / X k 1 xi )
p33
p11
x1
p12
p21
x2
p22
p23
p32
Сетевые модели
Сетевые модели описываются системой S=<B, D, I, O, M>, где B – множество
позиций, D – множество переходов, I: BD {0,1} – входная функция, O: BD
{0,1} – выходная функция, M – функция разметки сети.
x3
p33
Поступление задания
d1
Задание ждет
b1
Начало выполнения
задания
d2
Задание выполняется
b2
Выполнение задание
закончено
d3
Задание ожидает
вывода
b3
Выдача задания
d4
·
b4
Метод Монте-Карло
Случайные величины
Вероятность случайного события - это мера того, насколько велика
возможность его возникновения.
Вероятность изменяется от 0 (вероятность невозможного события) до 1
(вероятность достоверного события).
Случайная величина является более обобщенным понятием случайного
события.
Случайные величины могут быть дискретными или непрерывными.
Непрерывная
случайная величина
Случайная величина называется непрерывной, если она может принимать
любое значение из некоторого интервала (a, b).
Непрерывная случайная величина характери-зуется функцией
распределения F(x) и плотностью вероятности f(x)
Функция распределения
Определение:
F ( x) P( X x).
Дискретная
случайная величина
Случайная величина X называется дискретной, если она может принимать
дискретное множество значений x1, x2,…, xn.
Свойства:
p1 + p2 + … + pn = 1.
Характеристики
дискретных величин
• Математическое ожидание:
Плотность вероятности
Определение:
1) 0 F ( x) 1 при x (; );
2) F () 0, F () 1;
3) x1 x2 F ( x1 ) F ( x2 )
b
P(a X b) f ( x)dx.
=M[X ] xi pi .
1) f ( x) 0,
Дисперсия:
2)
i 1
•
=D[X ]=M[(X ) ]=M[X ] .
2
2
2
Свойства
математического ожидания и дисперсии
1) M[ X c] M[ X ] c
2) M[cX ] c M[ X ]
3) M[ X Y ] M[ X ] M[Y ]
1) D[ X c] D[ X ]
2) D[cX ] c 2 D[ X ]
a
Свойства:
n
2
f ( x)dx 1.
Характеристики
непрерывных величин
b
=M[X ] x f ( x)dx.
a
b
=M[(X ) ]= ( x )2 f ( x)dx.
2
2
a
Законы распределения
Равномерное распределение:
Корреляция и
коэффициент корреляции
f ( x) 1/(b a)
(b a) / 2
kij M [( X i i )( X j j )] M [ X i X j ] i j .
(b a) /12
ij
2
2
Экспоненциальное
x
1
f ( x) e
2
1
y b
fX
|a|
a
X U(0,1) Y U(b, a b)
Y aX b fY ( y )
( x )2
1
2
e
2 2
X N(0,1) Y N(b, a 2 )
Независимые
случайные величины
Дискр.
p ( x, y ) P( X x, Y y ), p ( x, y ) p X ( x) pY ( y ),
p X ( x) p( x, y ), pY ( y ) p( x, y )
yB
xA
Непр
P( X A, Y B ) f ( x, y )dxdy,
B A
f ( x, y ) f X ( x) fY ( y ),
Свойства
( x) f ( x)dx
f ( x)
.
Y ( X ), M[Y ]
Нормальное
i2 2j
Функции с.в.
2 2
f X ( x)
kij
f ( x, y )dy, fY ( y )
f ( x, y )dx
1) M[ XY ] M[ X ] M[Y ]
2) D[ X Y ] D[ X ] D[Y ]
Случайные процессы
Оп. 1: Отображение F, сопоставляющее каждому элементу tT одну из
случайных величин Xt, называется случайной функцией на T. Сама случайная
величина называется Xt сечением случайной функции F в точке t.
Оп. 2: Отображение f, сопоставляющее каждому элементу tT число xt,
называется реализацией случайной функции F.
Оп. 3: Случайная функция F, заданная на подмножестве T числовой прямой
R, называется случайным процессом на T.
Примеры
случайных процессов
• Число Xt -частиц, зарегистрированных счетчиком за время
наблюдения t.
• Колебания высоты Xt, регулируемого автопилотом летательного
аппарата в момент времени t.
• Изменение во времени t атмосферного давления Xt в данном
географическом пункте.
Стационарные
случайные процессы
i
для i T
i2 2
для i T
i ,i j j
для i, j T
Центральная
предельная теорема
M [ X 1 ] M [ X 2 ] ... M [ X n ] ,
D[ X 1 ] D[ X 2 ] ... D[ X n ] 2 ,
n
X i n
n 2 i 1
1
Yn
y
P(Yn y )
n
2
1
e x / 2 dx
2
Следствие
( x )2
3
1
dx 0.997
2 3
P ( 3 X 3) 0.997
2
e
2 2
1 n
3
P Xi
0.997
n
n i 1
Метод Монте-Карло
Задача :
Вычислить параметр
Решение :
1) X : M[ X ]
2) x1 , x2 ,..., xn
3)
1 n
xi
n i 1
Способы получения случайных величин
• физические генераторы (датчики) случайных величин;
• программные генераторы (датчики) псевдослучайных чисел.
Линейные конгруэнтные генераторы (ЛКГ)
i+1 = (ai+c) (mod m),
i(0, m-1), |(0, m-1)|=m
Теорема: ЛКГ имеет полный период, когда
выполняются следующие условия:
• m и c являются взаимно простыми числами;
• если m делится на простое число q, то a-1 тоже делится на q;
• если m делится на 4, то a-1 тоже делится на 4.
Пример 1:
Пример 2:
i+1 = (ai+c) (mod m),
i+1 = (ai+c) (mod m),
m=5, c=3, a=6, 0=4.
m=5, c=5, a=6, 0=4.
1 = (6•4+3) (mod 5)=2,
1 = (6•4+5) (mod 5)=4,
2 = (6•2+3) (mod 5)=0,
2 = (6•4+5) (mod 5)=4.
3 = (6•0+3) (mod 5)=3,
4 = (6•3+3) (mod 5)=1,
5 = (6•1+3) (mod 5)=4,
6 = (6•4+3) (mod 5)=2.
Мультипликативные генераторы
i+1 = (ai) (mod m),
i(1, m-1), |(1, m-1)|=m-1
Теорема: Мультипликативный генератор имеет
период m-1, когда выполняются следующие
условия:
• m является простым числом;
• a является первообразным корнем по модулю m, т.е. наименьшее
целое число l, для которого al–1 делится на m, есть l = m-1.
Пример 3:
Пример 4:
i+1 = (ai) (mod m),
i+1 = (ai) (mod m),
m=5, a=2, 0=4.
m=5, a=4, 0=4.
1 = (2•4) (mod 5)=3,
1 = (4•4) (mod 5)=1,
2 = (2•3) (mod 5)=1,
2 = (4•1) (mod 5)=4,
3 = (2•1) (mod 5)=2,
3 = (4•4) (mod 5)=1.
4 = (2•2) (mod 5)=4,
5 = (2•4) (mod 5)=3.
Рекомендуемые параметры
• m = 231-1 = 2 147 483 647
• a = 630 360 016
Моделирование дискретной случайной величины
Необходимо получить последовательность значений xi случайной величины
X с распределением:
Метод Неймана для моделирования непрерывной случайной величины
Случайная величина определена на конечном интервале (a, b) и имеет
ограниченную плотность вероятности f(x)<M:
1) Выбираются два значения , случайной величины и вычисляются
величины
=a+ (b-a), =M
2) Если <f(), то x= . Иначе повторяем п.1.
Моделирование дискретной случайной величины
• Интервал (0,1) разбивается на n частей с длинами p1,p2,…,pn.
Полученные интервалы нумеруются цифрами 1,2,…n. Координаты
точек деления y0=0, y1=p1, y2=p1+p2, yn=p1+p2+…+pn.
• Выбирается стандартно равномерно распределенная случайная
величина и строится точка y=.
• Если эта точка попадает в интервал с номером i, то X=xi.
Моделирование равномерно распределенной случайной величины U(a,b)
• Генерируем U(0,1)
• Возвращаем x=a+(b–a )
Пример 5:
1 2 3
0.2 0.5 0.3
={0.43, 0.75, 0.11, 0.98, 0.35, 0.64, 0.23}
x={ 2, 3, 1, 3, 2, 2, 2}
Моделирование нормально распределенной случайной величины N(,2)
Моделирование непрерывной случайной величины
Для нахождения значения непрерывной случайной величины X,
распределенной в интервале (a,b) с плотностью f(x) необходимо решить
уравнение:
где - случайная величина, которая имеет стандартной равномерное
распределение
Смещенные и усеченные распределения
x min{x : F ( x) }
Моделирование экспоненциально распределенной случайной величины
• Генерируем U(0,1)
• Возвращаем x= – ln
1
n
i n
n i 1
x x x
x1 2 ln 1 sin(2 2 )
x2 2 ln 1 cos(2 2 )
f * ( x) f ( x a )
f ( x)
f * ( x) b
f ( x)dx
a
Моделирование коррелированных случайных величин
k 2 e ||
xn a0 n b1 xn 1
k 2 e || (1 | |)
xn a0 n a1 n 1 b1 xn 1 b2 xn 2
Обработка результатов наблюдений
Множество возможных значений случайной величины X называется
генеральной совокупностью или пространством выборки.
Множество измеренных значений (x1, x2,…xn) случайной величины
называется выборкой, где n – объем выборки.
Любая функция зависящая от наблюдений называется статистикой.
Вариационным рядом называется последовательность элементов выборки,
расположенных в неубывающем порядке.
Минимальный xmin и максимальный xmax элементы выборки называются
крайними.
Разность R= xmax- xmin называется размахом.
Пример 1:
• {0, -2, 3, 2, 3, -1, -4, 0, 1, 2, -2}
• {-4, -2, -2, -1, 0, 0, 1, 2, 2, 3, 3}
• xmin=-4, xmax=3, R=7
L() f ( x1 ) f ( x2 )... f ( xn )
n
]
Оценка называется несмещенной, если M[ˆ
Оценки средних значений, дисперсии, корреляции
ˆ i 1
n
n
( xi ˆ)2
, ˆ 2 i 1
n j
n 1
n 1
(1 i / n)i
ˆ 2 ] 2 1 2 i 1
M[
n 1
L() P ( x1 ) P ( x2 )...P ( xn )
lim P (| ˆ
n | ) 0
xi
Математическое ожидание оценки дисперсии
Принцип максимального правдоподобия
Точечные оценки
Точечной оценкой числовой характеристики генеральной совокупности
ˆ ( x , x ,..., x )
называется статистика ˆ
n
n
1
2
n
приближенно равная .
Оценка называется состоятельной, если для любого >0
n
Пример 2:
Последовательность случайных чисел:
{0.42, 0.52, 0.33, 0.43, 0.23,
0.58, 0.76, 0.53, 0.64, 0.21}
Оценка математического ожидания: 0.48.
Оценка дисперсии: 0.07.
,
( xi ˆ)( xi j ˆ)
kˆ j ˆ
i
ˆ j 2 , k j 1
,
n j
ˆ
где j 1,..., n 1.
L
2 L
0,
0
2
Пример 3:
L() k (1 ) n k
ln L() k ln (n k ) ln(1 )
ln L k n k
k
0
1
n
Интервальные оценки
Доверительным интервалом числовой характеристики генеральной
совокупности с доверительной вероятностью называется интервал (1, 2)
со случайными границами 1= =1(x1, x2,…xn), 2= 2(x1, x2,…xn), который
накрывает с вероятностью : P(1<< 2)=, где =1- – уровень
значимости
Построение интервальной оценки для среднего значения
ˆ
P (
ˆx
ˆx
ˆ
) 2( x ) 1
n
n
2( x ) 1 1 ( x ) 1 /2
x u1 /2 , где u1 /2 1 (1 /2)
ˆ
P (
ˆ u1 /2
n
ˆ
ˆ u1 /2
n
)1
Пример 4:
ˆ 0.132,
ˆ 1.05, 0.05
n 100,
ˆu
ˆu
ˆ 1 /2
ˆ 1 /2 ) 1
P (
n
n
u1 /2 u0.975 1.96
1.05 1.96
) 0.95
10
P (0.07 0.34) 0.95
P (|0.132 |
Пример 5:
1, 0.05,
u1 / 2
u1 / 2
n
u0.975 1.96
0 .1
n u1 / 2 / 0.1 19.6
n 385
Распределение Стьюдента
Статистические гипотезы
Статистической гипотезой называется предположение о виде и свойствах
генерального и выборочного распределений.
Критерием значимости называется правило проверки статистической
гипотезы.
Статистикой критерия значимости Z называется функция наблюдений, по
значениям которой судят о справедливости гипотезы.
Критической областью критерия называется подмножество Vk множества V
значений статистки Z, вероятность попадания в которое при условии
истинности гипотезы равна уровню значимости 0, т.е. P(ZVk)=.
Множество V\Vk называется областью допустимых значений статистики
критерия.
Схема проверки гипотез
1. Выдвигается проверяемая гипотеза H0 и ей альтернативная H1.
2. Выбирается уровень значимости (0.1, 0.05, 0.01, 0.001).
3. Выбирается статистика Z, строится критическая область Vk и область
допустимых значений V\Vk.
4. Вычисляется выборочное значение статистики.
5. Если ZVk, гипотеза H0 отвергается, иначе –принимается.
Мощность критерия
• Мощностью критерия называется вероятность отклонения гипотезы
H0, когда она ложна.
• Ошибка первого рода – отклонение гипотезы H0, когда она верна.
• Ошибка второго рода – принятие гипотезы H0, когда она ложна.
Проверка гипотез с помощью доверительных интервалов
Гипотеза H0: = 0 принимается, если построенный доверительный интервал
покрывает 0, и отвергается в противном случае.
ˆ 0
ˆ
| Z | u1 /2 H 0 принимается
Z n
| Z | u1 /2 H 0 отвергается
k
Пример 6:
ˆ 0.132,
ˆ 1.05, 0.05
n 100,
H 0 : 0 0.5
u1 /2 u0.975 1.96
ˆ 0
0.132 0.5
10
3.5
ˆ
1.05
| Z | 3.5 1.96
Z n
Метод гистограмм
1) [b0 , b1 ),[b1 , b2 ),...,[bk 1 , bk )
2) h( x) hi / n, bi 1 x bi , i 1, 2,..., k
3) P(bi 1 x bi )
bi
f ( x)dx (bi bi 1 ) f ( y )
bi 1
4) h( y ) hi / n (bi bi 1 ) f ( y )
Пример 7:
4) Z
i 1
(hi npi ) 2
npi
| Z | 2k 1,1 H 0 принимается
5)
2
| Z | k 1,1 H 0 отвергается
Пример 8:
{0.42, 0.52, 0.33, 0.43, 0.23,
0.58, 0.76, 0.53, 0.64, 0.21}
h={2, 3, 4, 1}, p ={0.25, 0.25, 0.25, 0.25}
2
2
Z =2, 3,0.9
6.3, | Z | 3,0.9
Марковские процессы
Конечные автоматы
Конечным автоматом называется система S={U, X, Y, f, g}, где U – входной
алфавит, X– алфавит состояний, Y – выходной алфавит, f: UX – функция
переходов, g: UX – функция выходов.
Марковские процессы
Метод 2
1) [b0 , b1 ),[b1 , b2 ),...,[bk 1 , bk )
2) h( x) hi , bi 1 x bi , i 1, 2,..., k
bi
f ( x)dx
3) pi bi1
P( x j )
bi1 x j bi
Виды марковских процессов
• Дискретная марковская цепь
• Непрерывная марковская цепь
• Непрерывнозначный марковский процесс
Система массового обслуживания
Неприводимая цепь Маркова
Пусть C класс состояний включающий в себя
существенное состояние xi и все состояния, с ним
сообщающиеся.
• Если класс C состоит из одного состояния xi, то это состояние
называется поглощающим.
• Если цепь Маркова состоит из одного класса существенных
сообщающихся состояний, то она называется неприводимой.
P(n k ) ak , k 0,1, 2,..., ak 1
k 0
i 1 , i 1
j
, i 0
a0 a1 a2 a3 a4
a0 a1 a2 a3 a4
G
0
a0
a1
a2
a3
0
0
a0
a1
a2
0
0
0
a0
a1
Типы состояний
f j (k ) P( X k x j , X k 1 x j ..., X 1 x j / X 0 x j ), F j f j (k )
k 1
Состояние xj называется возвратным, если Fj=1.
Состояние xj называется нулевым, если pjj(k)0 при k.
Состояние xj называется периодическим с периодом dj, если
возвращение в него возможно только через кратное dj число шагов.
•
•
•
Матрица переходных вероятностей за k-шагов
p j (k ) P( X k x j ) p (k ) [ p1 (k ), p2 (k ),..., pn (k )]
pij (k ) P( X k x j / X 0 xi )
pij (k ) P( X k 1 xs / X 0 xi ) psj pis (k 1) psj
s
p
0
G
0
0
p
0
q 0
0 q
p q
0
0
p q
s
G (k ) G (k 1)G,
G (k 1) G (k 2)G,
G (k ) G k
k
p(k ) p(0)G
G (k (k 2)) GG
Эргодическая цепь Маркова
• Цепь Маркова называется эргодической, если существует предел
pij(k) pj при k, который не зависит от i.
• Теорема. Неприводимая возвратная непериодическая цепь Маркова
является эргодической.
Стационарное распределение
Сообщающиеся состояния
• Если xj и s: pij(s)>0 и для k: pji(k)=0, то xi - несущественное
состояние.
• Если s и k: pij(s)>0 и pji(k)>0, то существенные состояния xi и xj
называются сообщающимися
0
p
G
0
p
0
0
q 0
0 q
p q
0
0
p q
p11 (k )
p1n (k )
lim G (k ) lim G k lim
k
k
pn
pn
p1
pn
k
pn1 (k )
p1
p1
pnn (k )
p1
pn p11
p1n
p1
pn pn1
pnn
p11
p1n
pn1
pnn
p1
p1
pn
pn p1
pn
Моделирование случайных процессов
Пример 3:
p1
p2 p1
p2
0.8 0.2
Векторный
стохастический
процесс
0.6 0.4
p1 0.8 p1 0.6 p2
0 0.2 p1 0.6 p2
p2 0.2 p1 0.4 p2
0 0.2 p1 0.6 p2
0 0.2 p1 0.6 p2
p 0.75 0.25
1 p1 p2
(i ) M[v(i )]
2 (i ) M{[v(i ) (i )][v(i ) (i)]T }
K (i, j ) M{[v(i ) (i)][v( j ) ( j )]T }
Непрерывные марковские цепи
• Случайный процесс с непрерывным временем называется
непрерывной марковской цепью, если поведение системы после
произвольного момента времени t0 зависит только от состояния
процесса в момент времени t0 и не зависит от поведения процесса до
момента времени t0 .
K (i, i ) 2 (i )
Стационарные
процессы
k 0
k 0
Спектральная
плотность
z
i
i
K v (i ),
1
M[v(i )v (i )] K v (0)
S v (e j ) d
2
T
P0, j (t ) 0 P0, j (t ) 0 P1, j (t ),
Pi , j (t ) i Pi 1, j (t ) ( i i ) Pi , j (t ) i Pi 1, j (t )
Pi ,0 (t ) 0 Pi ,0 (t ) 1 Pi ,1 (t ),
Pi , j (t ) j 1 Pi , j 1 (t ) ( j j ) Pi , j (t ) j 1 Pi , j 1 (t )
lim Pij (t ) p j , lim Pij (t ) 0
t
Sv ( z )
z e j ,
Pi , j (t h) Pi ,k (h) Pk , j (t ) Pi ,k (t ) Pk , j (h)
Финальные вероятности
P[v(i1 k ) v1 , v(i2 k ) v2 ,..., v(im k ) vm ]
2 (i ) 2
K (i, j ) K (i j )
Pi , j (t ) P( X (t h) x j / X (h) xi )
Pi ,i 1 (h) i h o(h) при h 0
Pi ,i 1 (h) i h o(h) при h 0
P (h) 1 ( )h o( h) при h 0
i
i
i ,i
Pi , j (0) i , j , 0 0, 0 0, i 0, i 0
P[v(i1 ) v1 , v(i2 ) v2 ,..., v(im ) vm ]
(i )
Процесс рождения и гибели
P[v(i1 ) v1 , v(i2 ) v2 ,..., v(im ) vm ]
t
0 p0 1 p1 0
j 1 p j 1 ( j j ) p j j 1 p j 1 0
Дискретный
белый
шум
2 , i j
K v (i j ) v
0, i j
Sv ( z ) v2
Экспоненциально
Коррелированный
шум
(i k )
K v (i k ) 2 exp
T
2
2 / T
(1 e
)
Sv ( z )
/ T
1
(z e
)( z e / T )
Корреляционное описание случайных процессов
v(t ) A0 1(t 0 ) ( Ai 1 Ai ) 1 t j
i 0
j 0
[ Ai ] 0, f ( ) e , 0
v(t ) a cos(t )
1
, 0 2
f ()
2
1
2
f
(
)
, 0
2 2
k v ( ) d e
i 1
Преобразование уравнений
x(k 1) Ax(k ) Bv(k )
H ( z ) C ( Iz A) 1 B
y
(
k
)
Cx
(
k
)
x(k ) Tx(k ), det T 0
x(k 1) T 1 x(k 1) T 1 ATx (k ) T 1Bv (k )
y (k ) CTx(k )
x(k 1) Ax(k ) Bv(k )
A T 1 AT , B T 1 B, C CT
y (k ) Cx(k )
H ( z ) CT ( Iz T 1 AT ) 1T 1B H ( z )
Вычисление
передаточной функции
y (k 2) a1 y (k 1) a0 y (k ) b1v(k 1) b0v (k )
Уравнения системы
x(k 1) Ax(k ) Bv(k )
y (k ) Cx(k )
( z 2 a1 z a0 ) y (k ) (b1 z b0 )v(k ), z f (k )
x(1) Ax(0) Bv(0)
2
x(2) Ax(1) Bv(1) A x(0) ABv(0) Bv(1)
x(3) Ax(2) Bv(2) A3 x(0) A2 Bv(0) ABv(1) Bv(2)
Виды устойчивости
k 1
x(k ) Ak x(0) Ak i 1 Bv(i),
y (k ) H ( z )v(k ), H ( z )
y (k ) Cx(k )
f (k 1)
(b1 z b0 )
( z a1 z a0 )
2
x (k ) : x (k 1) f [k , x (k )], x (0) x0
x(k ) : x(k 1) f [k , x(k )], x(0) x0
1) x0 x0 x(k ) x (k )
2) x0 x0 d lim x(k ) x (k ) 0
k
i 0
Z-преобразование
f (0), f (1), f (2),...
F( z ) z i f (i )
i 0
x(k 1) Ax(k ) Bv(k ), y (k ) Cx(k )
zX( z ) zx(0) AX( z ) BV ( z ), Y( z ) CX( z )
1
Y( z ) H ( z )V ( z ), H ( z ) C ( Iz A) B
Устойчивость
линейной системы
Дискретная система является устойчивой, если все собственные числа i
матрицы A лежат внутри единичного круга
| i | < 1
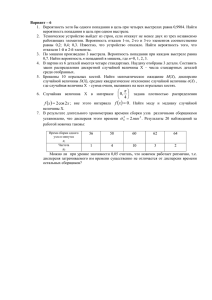
x(k 1) ax(k ), (0) 0 , k
x(k ) a k x(0), k
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
a = 0.9, k = 32:
0
-1
1
-0.8
-0.6
-0.4
-0.2
0
-0.2
0
0.2
0.4
0.6
0.8
1
a = 0, k = 1:
1
1
0.9
0.9
0.8
0.7
0.8
0.6
0.7
0.5
0.6
0.4
0.5
0.3
0.4
0.2
0.3
0.1
0.2
0
-1
0.1
0
-1
-0.8
-0.6
-0.4
0.2
0.4
0.6
0.8
1
a = -0.5, k = 5:
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
a = 0.8, k = 16:
1
0.9
0.8
1
0.7
0.9
0.6
0.8
0.7
0.5
0.6
0.4
0.5
0.3
0.4
0.2
0.3
0.1
0.2
0.1
0
-1
a = 0.5, k = 5:
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
a = 1, k = :
0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Прохождение через систему дискретного белого шума
x(k 1) Ax(k ) Bv(k )
y (k ) Cx(k )
v (i ) M[v(i )] 0, v2 (i ) M[v(i )v T (i )] v2
0 M[ x(0)], 02 M{[ x(0) 0 ][ x(0) 0 ]T }
x (i ) Ai 0 , 2x (0) 02 , S y ( z ) H ( z ) Sv ( z ) H ( z 1 )
2x (i 1) A 2x (i ) AT Bv2 B T , 2x A 2x AT B v2 B T
Вычисление параметров выходной последовательности
y (i ) CAi 0 , 2y (0) C 02C T ,
2y (i ) C 2x (i )C T , 2y C 2xC T
Вычисление дисперсии
выходного сигнала
2y K y (0)
1
j
j
j
H (e ) S v (e ) H (e ) d
2
v2
H (e j ) H (e j ) d
2
2
y
v2
2j
H ( z)H ( z
1
K y (0)
S y (e j ) d
2
2
y
Теорема о нормальных процессах
x(k 1) Ax(k ) Bv(k )
y (k ) Cx(k )
2
v(i) N (v , v2 )
x(i) N ( x , x )
2
2
x(0) N (0 , 0 ) y (i) N ( y , y )
Экспоненциально коррелированный шум
x(k 1) ax(k ) v(k ), x(0) x0 , k
v (i ) M[v(i )] 0, v2 (i ) M[v(i )v T (i )] v2
1
, Sv ( z ) v2 , S x ( z ) H ( z ) Sv ( z ) H ( z 1 ),
za
v2
v2
2
2 2
2
2
Sx ( z)
,
a
,
x
x
v
x
( z a )( z 1 a )
1 a2
H ( z)
1
)
dz
, z e j
z
Теорема вычетов
n
v2
1
1
2
H ( z ) H ( z ) z dz v Res H ( z ) H ( z 1 ) z 1
zi
2j
i 1
Res f ( z ) lim f ( z )( z zi )
z zi
zi
S y ( z ) H ( z ) Sv ( z ) H ( z 1 )
1
S y (e j ) d
2
Res f ( z )
zi
d k 1
1
lim k 1 f ( z )( z zi ) k
(k 1)! z zi dz
Теорема вычетов
x(k 1) 0.5 x(k ) v(k ), H ( z )
2y
v2
2j
1
z 0.5
z 1dz
( z 0.5)( z 1 0.5)
( z 0.5) z 1dz 4 2
v2 lim
3 v
z 0.5 ( z 0.5)( z 1 0.5)
Системы массового обслуживания
Структура СМО
Классификация СМО
• СМО с отказами и с ожиданием
• СМО с ограниченным и неограниченным числом устройств
• Однофазные и многофазные СМО
• Упорядоченные и неупорядоченные СМО
• СМО с приоритетами
Поток событий
Потоком событий (ПС) называется последовательность событий,
происходящих последовательно в случайные моменты времени
Обозначение СМО
A/B/m[/K[/L]]
• A – описывает закон распределения интервалов времени между
последовательно поступающими заявками
• B – описывает закон распределения времени обслуживания заявок
• m – число обслуживающих устройств
• K – емкость накопителя системы
• L – число источников нагрузки
• M – экспоненциальное распределение
• Er – распределение Эрланга порядка r
• D – детерминированное распределение
• G – распределение произвольного типа
Под системой массового обслуживания (СМО) понимают динамическую
систему, предназначенную для эффективного обслуживания случайного
потока заявок при ограниченных ресурсах системы.
Компоненты СМО
Простейший поток событий
Простейшим ПС называется поток, обладающий одновременно свойствами
стационарности, ординарности и отсутствия последствий.
Теорема 1. Для простейшего ПС выполняется условие
Vk (t ) P( X (t ) k )
(t ) k t V (t ) P( X (t ) 1) t e t
e
1
k!
t0
P (T t 0 ) e d
0
t0
e
0
d t e t
Характеристики СМО
• Коэффициент загрузки устройства – =/(m)
• Среднее время ожидания заявки в очереди – d
• Среднее время пребывания заявки в системе – w
• Средняя длина очереди – q
• Среднее число заявок в системе – l
Основные соотношения
n
d lim
n
T
q lim
di
i 1
n
q(t )dt
n
w lim
n
w
i 1
i
n
T
l (t )dt
l lim 0
T
T
T
q d
l w
w d M[ S ]
0
T
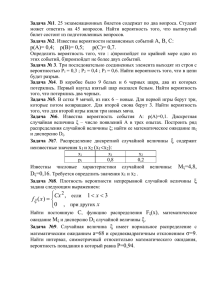
СМО M/M/1
• t – системное время
• tA – время поступления следующей заявки
• tS – время окончания обслуживания текущей
• b – очередь
• x – состояние устройства
• P – время обработки
• Q – количество задержек
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 0;
b = {};
x = 0;
Q = 0;
P = 0;
tA = 0.4;
tS = Null.
t = 0.4;
b = {};
x = 1;
Q = 0;
P = 0;
tA = 1.6;
tS = 2.4.
заявки
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 0.4;
b = {};
x = 1;
Q = 0;
P = 0;
tA = 1.6;
tS = 2.4.
t = 1.6;
b = {1};
x = 1;
Q = 0;
P = 1.2;
tA =2.1;
tS = 2.4.
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 1.6;
b = {1};
x = 1;
Q = 0;
P = 1.2;
tA =2.1;
tS = 2.4.
t = 2.1;
b = {1,1};
x = 1;
Q = 0.5;
P = 1.7;
tA =3.8;
tS = 2.4.
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 2.1;
b = {1,1};
x = 1;
Q = 0.5;
P = 1.7;
tA =3.8;
tS = 2.4.
t = 2.4;
b = {1};
x = 1;
Q = 1.1;
P = 2.0;
tA =3.8;
tS = 3.1.
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 2.4;
b = {1};
x = 1;
Q = 1.1;
P = 2.0;
•
•
•
•
•
tA =3.8;
t = 3.1;
b = {};
Q = 1.8;
tA =3.8;
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 3.1;
b = {};
x = 1;
Q = 1.8;
P = 2.7;
tA =3.8;
tS = 3.3.
t = 3.3;
b = {};
x = 0;
Q = 1.8;
P = 2.9;
tA =3.8;
tS = Null.
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 3.3;
b = {};
x = 0;
Q = 1.8;
P = 2.9;
tA =3.8;
tS = Null.
t = 3.8;
b = {};
x = 1;
Q = 1.8;
P = 2.9;
tA =4.0;
tS = 4.9.
•
•
•
•
•
•
•
•
•
•
{Ai}={0.4, 1.2, 0.5, 1.7, 0.2}
{Si}={2.0, 0.7, 0.2, 1.1, 3.7}
t = 3.8;
b = {};
x = 1;
Q = 1.8;
P = 2.9;
tA =4.0;
tS = 4.9.
t = 4.0;
b = {1};
x = 1;
Q = 1.8;
P = 3.1;
tA =Null;
tS = 4.9.
tS = 3.1.
x = 1;
P = 2.7;
tS = 3.3.
Обработка результатов
• Общее время моделирования
– T = 4.0
• Среднее число требований в очереди
– q = Q/T = 1.8/4.0 = 0.45
• Коэффициент использования устройства
– = P/T = 3.1/4.0 = 0.775
Планирование экспериментов
Основные понятия
• Фактор – входные переменные модели и структурные допущения
• Отклик (реакция) – выходные показатели работы системы
Примеры
факторов и откликов
Ф-р
О-к
Интенсивность поступления
Задержка сообщений
сообщений
Длительность сообщений
Пропускная способность
Число узлов
Коэффициент использования
Число линий
Длина очередей
Виды факторов
Виды факторов
Пример
Количественные
Интенсивность поступления
сообщений
Качественные
Дисциплина обслуживания
Управляемые
Количество устройств
Неуправляемые
Интенсивность поступления
сообщений
Модель измерений
y f ( x1 , x2 ,..., xk ), x1 X 1 , x2 X 2 ,..., xk X k
y a0
ax a xx
1i k
i i
1i k 1 j k
ij i
j
План эксперимента
D
Главные эффекты
x11
x21
xk1
x12
x22
xk 2
x1n
x2 n
xkn
Виды планов экспериментов
• План называется полным, если
n = q1 q2 …qk.
• План называется дробным, если
n < q1 q2 …qk.
• План называется симметричным, если
q1= q2 = … = qk.
• План называется равномерным, если уровни любого фактора
встречаются в плане одинаковое для данного фактора число раз.
Полный факторный план 23
№
1
x
x
Отклик
x
1
2
3
–1
–1
–1
y
1
2
+1
–1
–1
y
2
3
–1
( y2 y1 ) ( y4 y3 ) ( y6 y5 ) ( y8 y7 )
4
( y y ) ( y4 y2 ) ( y7 y5 ) ( y8 y6 )
e2 3 1
4
( y y ) ( y6 y2 ) ( y7 y3 ) ( y8 y4 )
e3 5 1
4
e1
+1
–1
y
Эффекты взаимодействия
e12
1 ( y4 y3 ) ( y8 y7 ) ( y2 y1 ) ( y6 y5 )
2
2
2
e13
1 ( y6 y5 ) ( y8 y7 ) ( y2 y1 ) ( y4 y3 )
2
2
2
e23
1 ( y7 y5 ) ( y8 y6 ) ( y3 y1 ) ( y4 y2 )
2
2
2
e123
1 ( y8 y7 ) ( y6 y5 ) ( y4 y3 ) ( y2 y1 )
2
2
2
Пример 1:
№
x
Отклик
x
1
2
1
–1
–1
3
2
+1
–1
4
3
–1
+1
1
4
+1
+1
2
3
4
+1
+1
–1
y
4
5
–1
–1
+1
y
5
6
+1
–1
+1
y
6
7
–1
+1
+1
y
7
8
+1
+1
+1
y
8
e1=(-3+4-1+2)/2=1
e2=(-3-4+1+2)/2=-2
e12=(3-4-1+2)/2=0
Дробные факторные планы
• Разрешающей способностью ДФП называется число, которое
гарантирует, что эффекты не смешиваются, если сумма их факторов
строго меньше данного числа.
Дробные факторные планы
k
3
III
IV
3-1
2
3 = 12
4-1
4
5
6
Виды планирования экспериментов
• Стратегическое планирование решает задачу получения
необходимой информации о модели, с учетом ограниченных
ресурсов.
• Тактическое планирование определяет способ проведения каждой
серии испытаний модели, предусмотренной планом эксперимента.
V
2
4 = 123
5-2
5-1
2
4 = 12
5 = 13
Метод общих
случайных чисел
2
5 = 1234
6-3
X X 1 X 2 , M[ X 1 ] 1 , M[ X 2 ] 2
6-2
2
4 = 12
5 = 13
6 = 23
M[ X ] M[ X 1 X 2 ] 1 2
2
5 = 123
6 = 234
2 D[ X ] D[ X 1 X 2 ]
2 D[ X 1 ] D[ X 2 ] 2k ( X 1 , X 2 )
Дробный факторный план 23-1
№
1
x
Метод дополняющих случайных величин
x
Отклик
x
1
2
3
–1
–1
+1
y
1
2
+1
–1
–1
y
2
3
–1
+1
–1
y
3
4
+1
+1
+1
y
4
Пример 2:
№
x
x
Отклик
x
1
2
3
1
–1
–1
+1
3
2
+1
–1
–1
4
3
–1
+1
–1
-3
4
+1
+1
+1
2
e1=(-3+4+3+2)/2=3
e2=(-3-4-3+2)/2=-4
e3=(3-4+3+2)/2=2
(1)
X i(1) X i(1) (U i(11) , U i(21) ,...U im
), i 1, n
( 2)
X i( 2 ) X i( 2 ) (U i(12 ) , U i(22 ) ,...U im
), i 1, n
U ij( 2 ) 1 U ij(1) , i 1, n, j 1, m
X i ( X i(1) X i( 2 ) ) / 2, i 1, n,
1 n
M X i X i X (1) X ( 2 ) X
i
i
n i 1
2
2
2
1 n
X i X i(1) X i( 2 ) 2k X i(1) X i( 2 )
D X i
n
4n
n i 1
*
X X a (Y Y )
Метод контрольных
случайных величин
DX
M X * M X a (Y Y ) X
*
Метод непрямых оценок
2
X
a 2 Y2 2ak XY
X i Yi Z i , MZ i Z
1 n
1 n
1 n
X i Yi Z i
n i 1
n i 1
n i 1
1 n
1 n
X
Yi Z
i n
n i 1
i 1