Контакт между деталями станочного приспособления.
реклама

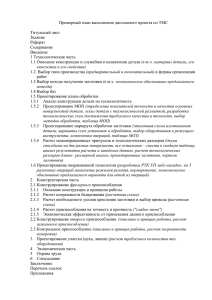
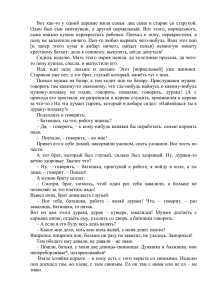
ПОГРЕШНОСТЬ ЗАКРЕПЛЕНИЯ ЗАГОТОВКИ, ВЫЗВАННАЯ ИЗНОСОМ КОНТАКТИРУЮЩИХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ ПРИСПОСОБЛЕНИЯ Ерохин В.В., Чемодуров А.Н. (Брянский государственный технический университет, г. Брянск, РФ) В статье излагаются основные математические взаимосвязи между погрешностью закрепления заготовки в приспособлении и износом базирующих поверхностей установочных деталей станочного приспособления. The article presents the basic mathematical relationship between the error fixing procurement to adapt and wear surfaces of the installation details based machine tool accessories. Ключевые слова: станочные приспособления, погрешность закрепления, износ. Keywords: machine-tool accessories, error fix, wear. Одной из актуальных задач в области проектирования надежных станочных приспособлений является расчет погрешности установки заготовки в приспособлении. Наиболее не полностью решенной является задача по определению погрешности закрепления заготовки, зависящей от изменяющейся формы базирующих поверхностей установочных деталей приспособления, вследствие их износа при обработке партии заготовок на предварительно настроенных станках. Погрешность закрепления зи, обусловленная износом базирующих поверхностей установочных деталей приспособления, определяется по формуле зи=усб– усб.и, где усб, усб.и –контактные деформации (на уровне макроформы и рельефа контактируемой поверхности) деталей приспособления или заготовки и деталей приспособления в направлении выдерживаемого технологического размера под действием силы зажима соответственно до износа контактирующих поверхностей и после их износа, мм. nк зи= (укт.i–укт.и.i)+(упл1.i+упл2.i)+(ууп1.i+ууп2.i) – i 1 – (упл1.u.i+упл2.и.i)–(ууп1.и.i+ууп2.и.i), мм, где укт–деформация контактируемых двух тел без учета рельефа (шероховатости, волнистости, макроотклонений), мм; i–номер контакта; nк– число контактов между деталями приспособления, и между заготовкой и опорными элементами, влияющих на выполнения технологических размеров; индекс и соответствует контактной деформации между телами при износе их контактирующих поверхностей; упл1,упл2–пластические контактные деформации соответственно первой и второй контактирующих деталей, мм; ууп1,ууп2–упругие контактные деформации соответственно первой и второй контактирующих деталей. Обозначим укт.и.i=укт.i–укт.и.i; упл.и.i=упл.i–упл.и.i; ууп.и.i=ууп.i–ууп.и.i, где 1 1 w M w M А А , ; упл.и=упл 1 ууп.и=ууп 1 Аи Аи где А, Аи –номинальные площади контактных поверхностей двух тел соответственно до и после их износа, мм2; , w, М–параметры начального участка опорной кривой соответственно шероховатости, волнистости, макроотклонения. При расчетах измененных площадей контакта, вследствие линейного износа, приняты следующие допущения: конфигурация изношенной поверхности прямо пропорциональна закону изменения контактного давления; отклонение от позиционирования заготовки или детали станочного приспособления относительно середины допуска на позиционирования подчиняется нормальному закону. Контакт сфера-сфера Контакт заготовки с установочной опорой. При таком виде сопряжения погрешность закрепления от износа контактирующей поверхности влияет только от износа поверхности установочной опоры. Контакт заготовки с установочной опорой представлен на рис. 1. Рисунок 1- Контакт сферической заготовки со сферической поверхности установочной опоры Решая геометрическую задачу сопряжения на рис. 1 (окружность изношенной поверхности должна проходить через три точки 1, 2 и 3), определим следующее выражение по определению радиуса изношенной сферической поверхности: Ru R Ro u Ro2 2 o A12 Ro 0,5u 2 A12 Ro u , мм, где Ro–радиус опорной поверхности установочной опоры (рис. 1), мм; u– износ опорной поверхности установочной опоры (рис. 1), мм; 2 0,5ITH Rз а 1 , мм, А1 0,5ITH 1 R R R R з o o з где ITH–допуск на отклонение осей между сферическими контактирующими поверхностями заготовки и установочной опоры (рис. 1), мм; Rз–радиус опорной поверхности заготовки (рис. 1), мм; а–полуось круговой площадки контакта сферических двух тел (заготовки и установочной опоры), мм. Радиус изношенной поверхности установочной опоры может принимать отрицательные и положительные значения. Положительные значения соответствуют положению центра изношенной сферы внутри неизношенной сферы установочной опоры, отрицательные значения соответствуют положению центра изношенной поверхности сферы вне сферы неизношенной поверхности установочной опоры. Полуось или радиус круговой площадки контакта определяется по формуле 1 12 1 22 3NRо Rз a3 , мм, = + , 4Rо Rз E1 E2 где – упругая постоянная соприкасающихся тел, МПа–1; N–нагрузка на контакт, Н, Е1 и Е2–модули упругости первого рода соответственно первого и второго контактирующего тела, МПа; 1 и 2 – коэффициенты Пуассона соответственно первого и второго контактирующего тела Полуось изношенной круговой площадки контакта определяется как 3NRи Rз aи 3 , мм. 4Rи Rз Для сопряжения сфера-сфера 2 3 R R Rз 1 9 2 N 2 ( Ro Rз ) R R Rз А 3 1 3 о и . = о и ; у = кт.и 2 2 R R R R R R R R Аи з o з и о з и о Контакт между деталями станочного приспособления. При контакте двух сферических поверхностей, принадлежащих деталям приспособления, радиус изношенных сферических поверхностей определяется выражением [1] Rоi2 , мм, Ru.i Rоi 8ui где Rоi–радиус неизношенной сферической контактирующей поверхности i-й детали приспособления, мм. Радиус изношенной круговой площадки контакта для первого (i=1) и второго (i=2) контактирующих тел 3NRи.1Rи.2 aи 3 , мм. 4Rи.1 Rи.2 Для сопряжения сфера-сфера 2 R R R Rи.2 3 А = о.1 о.2 и.1 ; Аи Rи.1 Rи.2 Rо.1 Rо.2 1 9 2 N 2 ( Ro.1 Rо.2 ) R R R Rи.2 1 3 о.1 о.2 и.1 . укт.и= 3 2 2 Ro.1Rо.2 R R R R и .1 и .2 о.1 о.2 Контакт сфера-плоскость Контакт заготовки с установочной опорой. Контакт заготовки с установочной опорой представлен на рис. 2. Решая геометрическую задачу сопряжения на рис. 2, получим следующее выражение по определению радиуса изношенной сферической поверхности: A12 u 2 , мм, А1=0,5ITH+a, мм, Ru 2u где ITH–допуск на отклонение оси сферической контактирующей поверхности заготовки (рис. 2), мм; а–полуось (радиус) круговой площадки контакта сферы и плоскости (заготовки и установочной опоры), мм. Рисунок 2- Контакт сферической заготовки с плоской поверхностью установочной опоры Полуось круговой площадки контакта при контакте неизношенных поверхностей сферы и плоскости определяется по формуле 3 a 3 NRз , мм. 4 Полуось изношенной круговой площадки касания заготовки с базирующей поверхностью установочной опоры определяется как 3NRи Rз aи 3 , мм. 4Rи Rз Для сопряжения сфера-плоскость 2 3 Rи Rз 1 9 2 N 2 Rи Rз А 3 . 3 1 = . у = кт.и 2 2 Rз Rи Аи Rи Контакт между деталями станочного приспособления. При контакте сфера-плоскость между деталями станочного приспособления радиус изношенной сферической поверхности определяется из выражения [1] 2 Rсф Rсф.u , мм, Rсф 8uсф где Rсф.и–радиус изношенной сферической контактирующей поверхности детали приспособления, мм; Rсф–радиус неизношенной сферической контактирующей поверхности детали приспособления, мм; исф–максимальный линейный износ сферической контактирующей поверхности, мм. Радиус изношенной круговой площадки контакта сферы с плоскостью определяется по формуле 3NRсф.и Rи aи 3 , мм. 4Rи Rсф.и Для сопряжения сфера-плоскость R R Rсф.и А = сф и ; Аи R R и сф.и 2 3 Rсф ( Rи Rсф.и ) 1 9 2 N 2 . 1 3 укт.и= 3 2 2 Rсф Rи Rсф.и Контакт сфера-цилиндр Контакт заготовки с установочной опорой. При данном типе контакта радиус изношенной цилиндрической поверхности будет различным для продольного и поперечного сечения цилиндра (рис. 3). Радиус изношенной цилиндрической поверхности в продольном направлении A2 u 2 , мм; А1=0,5ITH+aпр, мм, Ru.пр 1 2u где ITH–допуск на отклонение осей сферической и цилиндрической контактирующих поверхностей относительно друг друга (рис. 3), мм; апр– полуось эллиптической площадки контакта сферы и цилиндра в продольном сечении цилиндра, мм. Полуось эллиптической площадки контакта при контакте неизношенных контактирующих поверхностей сферы и цилиндра определяется по формуле [2] NRз Rц aпр na 3 , мм, 2 Rц Rз где na–коэффициент полуоси контурного эллипса, зависящей от его эксцентриситета и определяемый по методике [2]; Rц–радиус цилиндрической поверхности установочной опоры (рис. 3), мм; Rз–радиус сферической поверхности заготовки (рис. 3), мм. Рисунок 3- Контакт сферической поверхностью установочной опоры Радиус изношенной направлении Ru.поп Rц u цилиндрической Rц2 A22 Rц 0,5u 2 Rц2 A22 Rц u заготовки с поверхности цилиндрической в поперечном , мм; 2 0,5ITH Rз , мм, А2 0,5ITH 1 апоп 1 R R R R з ц з ц где апоп–полуось эллиптической площадки контакта сферы с цилиндром в поперечном сечении цилиндра, мм. Полуось эллиптической площадки контакта в поперечном направлении относительно цилиндра при контакте неизношенных контактирующих поверхностей сферы и цилиндра определяется по формуле [2] NRз Rц aпоп nb 3 , мм, 2 Rц Rз где nb–коэффициент полуоси контурного эллипса, зависящей от его эксцентриситета и определяемый по методике [2]. Полуось изношенной эллиптической площадки контакта в продольном направлении определяется по формуле NRз Rи.пр Rи.поп aи.пр na 3 , мм. 2 Rи.пр Rи.поп Rз ( Rи.пр Rи.поп ) Полуось изношенной эллиптической площадки контакта в поперечном направлении определяется по формуле аи.пр aи.поп nb , мм. nа Для сопряжения сфера-цилиндр 2 R [2 Rи.пр Rи.поп Rз ( Rи.пр Rпоп )] 3 А = ц ; Аи R R ( 2 R R ) и .пр и .поп ц з R [2 Rи.пр Rи.поп Rз ( Rи.пр Rпоп )] 9 2 N 2 (2 Rц Rз ) 1 3 ц . 3 4 Rц Rз R R ( 2 R R ) и .пр и .поп ц з Контакт между деталями приспособления. Радиус изношенной цилиндрической поверхности в поперечном направлении определяется по формуле Rц2 Ru.поп , мм, Rц 8uц n укт.и= 2 где иц–максимальный линейный износ цилиндрической контактирующей поверхности, мм. Для сопряжения сфера-цилиндр 2 )] 3 R R [2 Rи.пр Rи.поп Rсф.и ( Rи.пр Rпоп А = ц з ; Аи R R R ( 2 R R ) и .пр и .поп сф.и ц з 2 2 Rц Rз [2 Rи.пр Rи.поп Rсф.и ( Rи.пр Rпоп )] n 9 N (2 Rц Rз ) . укт.и 3 1 3 2 4 Rц Rз R R R ( 2 R R ) и .пр и .поп сф.и ц з Контакт цилиндр-призма Контакт заготовки с установочной опорой. Если обрабатываемая поверхность заготовки расположена с одной стороны от призмы, тогда радиус изношенной поверхности призмы в поперечном направлении определяется из выражения [1] 0,22 2,28du 0,5ITd 0,57u ctg Ru.прм , u где d–диаметр цилиндрической базы заготовки, мм; u–линейный износ поверхности призмы, мм; ITd–допуск на диаметр d, мм; 2–угол призмы. Если обрабатываемая поверхность заготовки расположена с двух сторон от призмы, тогда радиус изношенной поверхности призмы в поперечном направлении определяется из выражения [1] 2 0,125 2 du 0,5ITd u ctg Ru.прм . u Полуось (малая) изношенной эллиптической площадки контакта цилиндра с призмой в поперечном направлении определяется по формуле 2NdRи.прм aи.поп , мм, ( Rи.прм 0,5d )l sin 2 где l–длина контакта цилиндра с призмой, мм. В этом случае для сопряжения цилиндр-призма R 0,5d А = и .прм ; Rи .прм Аи 2 N n 9 N ( Rи.прм 0,5d ) . укт.и 3 2 2dRи.прм (sin ) 2 2Nd 2 sin l l sin Контакт между деталями приспособления. Полуось (малая) изношенной эллиптической площадки контакта цилиндра с призмой в поперечном направлении определяется по формуле 4NRи.поп Rи.прм aи.поп , мм. ( Rи.прм Rи.поп )l sin 2 N1 d 0,407 ln l sin l 2 2 В этом случае для сопряжения цилиндр-призма d ( Rи .прм Rи .поп ) А = ; 2 Rи .прм Rи .поп Аи укт.и 2 N1 d 0,407 ln l sin l 2 N n 2 2Nd sin l2 l sin 3 9 2 N 2 ( Rи.прм Rи.поп ) 4 Rи.прм Rи.поп (sin ) 2 . Контакт цилиндр-плоскость Контакт заготовки с установочной опорой. Радиус изношенной поверхности плоскости в поперечном направлении относительно цилиндра определяется из выражения A12 u 2 , мм; А1=0,5ITH+aп, мм, Ru.п 2u где ITH–позиционный допуск продольной оси цилиндра в плоскости параллельной плоскости контакта, мм; ап–полуось (малая) эллиптической площадки контакта цилиндра с плоскостью в поперечном сечении цилиндра, мм. 2Nd . ап l Полуось (малая) изношенной эллиптической площадки контакта цилиндра с плоскостью в поперечном направлении определяется по формуле 2NdRи.п aи.п , мм, ( Rи.п 0,5d )l где l–длина контакта цилиндра с плоскостью, мм. Для сопряжения цилиндр-плоскость R 0,5d А = и.п ; Rи.п Аи 2 N1 d 0,407 ln l l 2 N n 9 2 N 2 ( Rи .п 0,5d ) . укт.и 3 2 2dRи.п 2Nd 2 l l Контакт между деталями приспособления. Полуось (малая) изношенной эллиптической площадки контакта цилиндра с плоскостью в поперечном направлении относительно цилиндра определяется по формуле 4NRи.поп Rи.п aи.поп , мм. ( Rи.п Rи.поп )l В этом случае для сопряжения цилиндр-плоскость d ( Rи.п Rи.поп ) А = ; 2 Rи.п Rи.поп Аи 2 N n 9 2 N 2 ( Rи.п Rи.поп ) . 3 4 Rи.п Rи.поп 2Nd 2 2 l l Для сопряжений плоскость-плоскость и конус-конус погрешность з.и=0. Износ сопряжений, представленных на рисунках 1, 2 и 3, моделировался в электронно-информационной системе на основе метода конечных элементов. При этом распределения допуска ITH относительно оси симметрии сопряжения принималось нормальное. укт.и 2 N1 d 0,407 ln l l Список использованных источников 1. Станочные приспособления: Справочник в 2-х т. / Под ред. Б.Н. Вардашкина и А.А. Шатилова. – М.: Машиностроение, 1983. – 655 с. 2. Лурье,А.И. Теория упругости А.И. Лурье. – М.: Наука, 1970. – 940 с.