31.03.2015x - Сибирский федеральный университет
реклама

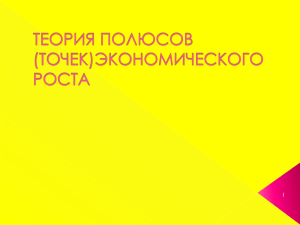
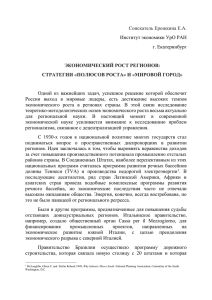
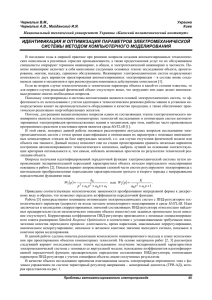
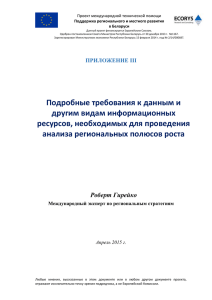
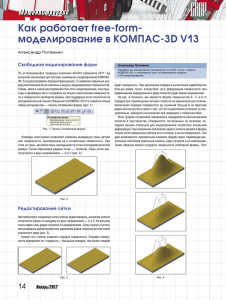
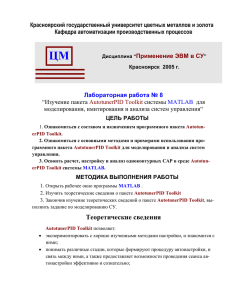
УДК 681.5 СИНТЕЗ ПИД-РЕГУЛЯТОРА НЕЛИНЕЙНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВИБРАЦИОННЫМ КАТКОМ Евдокимов С. И., научный руководитель д-р техн. наук Иванчура В. И., научный консультант канд. техн. наук Прокопьев А. П. Сибирский федеральный университет Цель работы: разработка методики синтеза ПИД-регулятора системы управления объектом описываемым передаточной функцией выше второго порядка. Объект исследования: система управления с обратной связью, передаточная функция которой выше второго порядка. Известна методика синтеза ПИД-регулятора для нелинейных систем управления модальным методом [1], где объект регулирования имеет передаточную функцию вида: b0 W0 ( s) . 2 a0 s a1 s a2 Задача исследования сводится к понижению исходной ПФ объекта управления до второго порядка. Известны работы [2, 3, 4, 5] священные задачам синтеза регуляторов. Предлагается следующая методика. Для понижения порядка ПФ выполняются следующие действия. 1. Составить характеристическое уравнение ПФ. Передаточная функция объекта управления: k Wy ( s ) . n a0 s a1 s n 1 ... an 1 Характеристическое уравнение: В( s) a0 s n a1 s n 1 ... an 1 k . 2. Найти корни уравнения. 3. По найденным корням вычислить полюса. Количество полюсов зависит от порядка ПФ. Какой порядок столько и будет полюсов. 4. Расчитать среднее значение полюсов. 5. По полученным полюсам восстановить характеристическое уравнение. 6. По графику переходной характеристики ПФ высшего порядка определить установившееся значние (k). 7. Синтезировать ПИД-регулятор по полученному уравнению ПФ. Пример: Объект управления состоит из двух колебательных звеньев соединенных последовательно, см. рис. 1. Получить уравнение второго порядка эквивалентное ПФ объекта управления. Рисунок 1 – Модель объекта управления Исходные данные: K2 0.1; K3 3; T2 0.2; T3 0.15; 2 0.3; 2 0.6; K2 0.1 W2 ( s ) 2 2 ; 2 T2 s 2 2 T2 s 1 0.04 s 0.12 s 1 K3 3 W3 ( s ) 2 2 . 2 T3 s 2 3 T3 s 1 0.0225 s 0.18 s 1 Передаточная функция объекта управления: 0.1 3 W23 ( s ) W2 ( s ) W3 ( s ) 2 2 0.04 s 0.12 s 1 0.0225 s 0.18 s 1 3000 . 4 3 9 s 99 s 841 s 2 3000 s 10000 Характеристическое уравнение: D( s) 9 s 4 99 s3 841 s 2 3000 s 10000. Переходная характеристика разомкнутой системы объекта управления показана на рис. 2. Амплитуда 0.4 0.3 0.2 0.1 0 0 0.5 1 1.5 2 Время, с 2.5 3 3.5 4 Рисунок 2 – Переходная характеристика Найдем корни уравнения: 10000 3000 v 841 . 99 9 По полученным корням определим полюса ПФ: s1 4 i 5.333; s2 4 i 5.333; s3 1.5 j 4.77; s4 1.5 j 4.77. Система устойчива, так как все полюсы расположены в левой полуплоскости. Определим показатели качества процесса управления: степень устойчивости: 23 min( Re(s1 ), Re(s2 ), Re(s3 ), Re(s4 )) 1.5; Im( s 1 ) Im( s 2 ) Im( s 3 ) Im( s 4 ) колебательность: 23 max , , , 3.18; Re( s1 ) Re( s2 ) Re( s3 ) Re( s4 ) перерегулирование: 23 e 23 100 37.235; 1 2. время регулирования: t p 23 3 23 С целью определения параметров системы второго порядка эквивалентной рассматриваемой системе четвертого порядка, считаем, что установившиеся значения их переходных характеристик совпадают, а полюса ПФ системы второго порядка определяются некоторыми средними значениями полюсов ПФ системы четвертого порядка. Для этого выполним следующие операции. 1. Вычисление среднего значения полюсов системы четвертого порядка: 4 i 5.333 (1.5 i 4.77) s11 2.75 i 5.051. 2 Выбираем отрицательное значение, так как действительная часть полюсов по условию устойчивости должна быть отрицательной. 2. Вычисление характеристического уравнения системы второго порядка для среднего значения полюсов с помощью математического пакета Mathcad: [s (2.75 j 5.051)] [s (2.75 j 5.051)] collect , s s 2 5.5 s 33.075101. 3. Приводим характеристическое уравнение системы второго порядка к виду, чтобы свободный член был равен единице s 2 5.5 s 33.075101 0.03023 s 2 0.166288 s 2 1. 33.0751101 Получаем что искомомая ПФ имеет вид: b0 Wэ , 2 0.03023 s 0.166288 s 2 1 где b0 – установившееся значение системы управления четвертого порядка (b0=0.3). Проверим корректность полученной ПФ с помощью пакета MATLAB, рис. 3. Амплитуда 0.4 0.3 0.2 WЭ 0.1 W23 0 0 0.5 1 1.5 2 Время, с 2.5 3 3.5 4 Рисунок 3 – Переходные характеристики ПФ W23 и Wэ По переходной характеристике видно, что эквиваленктная ПФ найдена верно. Для получения необходимых точности и качества переходного процесса можно синтезировать ПИД-регулятор. Уравиение ПИД-регулятора имеет следующий вид: K d s 2 K p s Ki Wy . s Параметры ПИД-регулятора в случае, когда полюса объекта регулирования получились комплексные, находятся по следующим формулам: ( 2 22 21 2 ) a0 a2 Kp ; b0 Ki 1 ( 2 22 ) a0 a0 b0 ; (1 2 2 ) a0 a1 , b0 где а0, а1, а2 – коэффициенты ПФ второго порядка. Kd Параметры β, η1, η2 подбираются итерационно. Принимаем η1=1, η2=5, β=0.5, получим, что ( 2 22 21 2 ) a0 a2 Kp 0.219; b0 Ki 1 ( 2 22 ) a0 a0 b0 2.444; (1 2 2 ) a0 a1 0.554. b0 На рис. 4 приведены переходные характеристики системы с ПИД-регулятором. Kd 1.4 1.2 Амплитуда 1 0.8 WЭ 0.6 0.4 W23 0.2 0 0 1 2 3 Время, с 4 5 6 7 Рисунок 4 – Переходная характеристика с ПИД-регулятором Разработана методика синтеза ПИД-регулятора системы управления объектом описываемым передаточной функцией выше второго порядка. Выполнена проверка работоспособности методики на передаточной функции объекта управления четвертого порядка. Список литературы 1. Прокопьев, А.П. Идентификация нелинейной системы управления с ПИДрегулятором [Электронный ресурс] / А.П. Прокопьев, В.И. Иванчура, Р.Т. Емельянов // Труды X Международной конференции «Идентификация систем и задачи управления» (SICPRO ‘15), 26 января – 29 января 2015 г., г. Москва. ИПУ РАН. М.: Институт проблем управления им. В.А. Трапезникова РАН, 2015. 1484 с. (С. 387-397). – Электронные текстовые дан. (121 файл, 68,5 Мб). – М.: ИПУ РАН, 2015. – 1 электронно–оптический диск (CD-ROM). – Системные требования: Pentium 4, Acrobat Reader 6.0 и выше. – ISBN 978-5-91450-1621-1. – Режим доступа: http://www.sicpro.org/sicpro15/code/r15_08.htm. 2. Теория автоматического управления. Ч. II. Теория нелинейных и специальных систем автоматического управления / Под ред. А.А. Воронова. – М.: Высш. шк., 1986. 3. Гамынин, Н.С. Гидравлический привод систем управления. – М.: Машиностроение, 1972. 4. Циммерман, В.В. Нелинейные свойства электрогидравлического вибрационного источника сейсмических колебаний // Проблемы нелинейной сейсмики. ИФЗ АН СССР. М.: Наука, 1987. С. 273 – 279. URL: http://www.seisel.com/docs/i_nelsv.pdf. 5. Лукас, В.А. Теория автоматического управления. – М.: Недра, 1990.