6.1. Динамика движения материальной точки
реклама

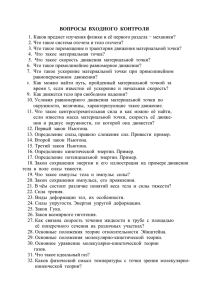
Тема6. Динамика вращения §6.1. Динамика движения материальной точки по окружности Кинематика вращательного движения материальной точки рассматривалась в пунктах 1.5-1.6. Было отмечено, что даже при равномерном движении материальной точки по окружности, ее линейная скорость непрерывно изменяется по направлению. Это происходит благодаря ускорению (1.21), называемому центростремительным аЦ , или нормальным ускорением – аn . Ускорение материальной точки, в соответствии со вторым законом Ньютона, сонаправлено с вектором равнодействующей приложенных сил, и равно: a F m. Таким образом, равномерное движение по окружности материальная точка может совершать, если равнодействующая F всех сил, приложенных к ней, направлена к центру окружности. Часто силу вызывающую центростремительное ускорение называют "центростремительной силой". Этот термин, как правило, вызывает заблуждение, ориентируя на поиск специфической центростремительной силы. Такой особой – центростремительной силы в природе не существует. Центростремительное ускорение вызывает равнодействующая приложенных сил. Во избежание недоразумений и ошибок мы рекомендуем не пользоваться термином "центростремительная сила", а уравнение динамики вращательного движения материальной точки, масса которой равна m, записывать в следующем виде: man Fi . i Динамика движения материальной точки по окружности может быть изучена на основе общего подхода – с помощью основного закона динамики вращательного движения. Уточним некоторые определения. Момент силы относительно точки O (полюса O ) – векторная физическая величина, равная векторному произведению радиус-вектора r точки приложения силы, проведенного из точки O , и вектора силы F : . M r,F (0.1) Рис.2.9. К определению вектора момента силы. Напомним, что векторное произведение представляет собой вектор, направление которого определяется по правилу буравчика. Абсолютная величина (модуль) вектора векторного произведения равна произведению модулей векторов–сомножителей и синуса угла между ними M rF sin r , F . Из рисунка 2.9 видно, что модуль M можно представить следующим образом: M rF sin r , F FL , где L r sin r , F – плечо силы относительно точки O . Плечо силы – кратчайшее расстояние от полюса O до линии действия силы, т. е. длина перпендикуляра, опущенного из полюса на линию действия силы. Момент силы относительно оси – это скалярная величина M , равная проекции на эту ось вектора момента силы M , определенного относительно точки, лежащей на этой оси: M F L , (0.2) где F – проекция силы F на плоскость, перпендикулярную оси Z , L – плечо силы F относительно оси Z . В случае действия нескольких сил Fi результирующий момент равен векторной сумме моментов M i всех сил: M Mi или M Mi , в последнем выражении берут алгебраическую сумму, в которой знак M i зависит от знака проекции M i на ось Z . Момент импульса материальной точки относительно точки (полюса – O ) – это векторная величина, равная векторному произведению L r , p , где r – радиус-вектор материальной точки (начало которого находится в полюсе O ), p – импульс точки. Момент инерции материальной точки относительно оси – скалярная величина, равная произведению массы m материальной точки на квадрат расстояния r от материальной точки до оси: J mr 2 . Вращательное уравнением, движение которое называется (0.3) материальной точки основным уравнением описывается динамики вращательного движения. Запишем уравнение второго закон Ньютона для материальной точки, движущейся по окружности радиусом r : d m F. (*) dt Учитывая формулу Эйлера , r , перепишем (*) следующим образом: d , r d dr m m , r m , F . dt dt dt Умножим справа обе части полученного уравнения векторно на радиус-вектор r материальной точки: m d dr d , r m r , r mr , r , F . dt dt dt (0.4) Соотношение (2.28) можно упростить. Действительно, поскольку dr вектор , параллелен вектору r , то dt dr r , dt 0 . Имеем: d m r , r r , F . dt Раскрывая оставшееся двойное векторное произведение: d d d r , dt , r dt r , r r r , dt r , F и учитывая, что векторы r и d dt взаимно перпендикулярны, а поэтому их скалярное произведение равно нулю, приходим к выражению: d mr r,F . dt 2 (0.5) Правая часть уравнения (2.29) представляет собой момент M силы F относительно полюса. Произведение mr 2 J есть момент инерции материальной точки, d dt – угловое ускорение вращательного движения. Следовательно, уравнение (2.29) можно записать так: d J J M . dt (0.6) Уравнения (2.30) выражает основной закон динамики вращательного движения материальной точки. Оно является не только следствием, но и полным аналогом второго закона Ньютона ma F для случая поступательного движения материальной точки. Заметим, что уравнение J M получено для случая, когда полюс совпадает с центром вращения материальной точки. Если рассматривать движение материальной точки относительно оси вращения Z , то уравнение движения примет соответствующую скалярную форму: JZ dZ MZ , dt (0.7) где M Z – суммарный момент сил относительно оси Z , J Z – момент инерции относительно оси, Z – проекция угловой скорости на ось Z , dZ dt – угловое ускорение. Продифференцируем уравнение , L r,P определяющее момент импульса L материальной точки по времени: d dL d r , m , m r , m r , ma r , F M . dt dt dt (0.8) dL M. dt (0.9) Получаем: Это уравнение является одним из основных уравнений динамики вращательного движения материальной точки. Из соотношения (2.33) следует, что под воздействием приложенного момента сил M 0 момент импульса материальной точки изменяется таким образом, что dL Mdt . (0.10) Соотношение (2.34) выражает закон изменения момента импульса. Очевидно, что вектор приращения момента импульса dL направлен параллельно вектору M момента силы. Выражение момента импульса можно представить в следующем виде: L r , m m r , mr , , r J Обратим внимание на то, что соотношения (2.30) и (2.33) получены нами для материальной точки. §6.2. Кинетическая энергия вращательного движения Найдем кинетическую энергию тела, вращающегося относительно неподвижной оси. Будем рассматривать тело как систему материальных точек и воспользуемся формулой (2.62). Скорость i материальной точки выразим через угловую скорость вращения тела по формуле Эйлера. 2 mii2 mi i , ri 2 J 2 2 T mi ri 2 . 2 2 2 i i i Здесь через ri обозначен радиус-вектор i -ой частицы тела, i ее угловая скорость (одна и та же для всех точек), наконец J – момент инерции тела относительно оси, проходящей через его центр масс. Таким образом, кинетическая энергия вращающегося тела описывается следующей формулой T J 2 . 2 (2.63) Последнее уравнение для вращательного движения тела аналогично уравнению T m 2 2 для поступательного движения. Если тело движется поступательно в инерциальной системе отсчета со скоростью 0 и вращается относительно подвижной оси, проходящей через центр масс с угловой скоростью , причем ось перпендикулярна направлению скорости 0 (так называемое плоское движение, например, качение колеса), то его кинетическая энергия T равна сумме кинетических энергий поступательного и вращательного движений: T m02 J 2 , 2 2 (2.64) здесь m – масса тела, J – его момент инерции относительно оси вращения. Докажем справедливость соотношения (2.64). Воспользуемся классическим законом сложения скоростей: i ЦМ , ri , где i - скорость движения i -й материальной точки относительно неподвижной системы отсчёта; ЦМ – скорость центра масс тела; ri – радиус вектор i -й точки, проведенный из центра масс; – угловая скорость вращения тела. Возведя выражение для i в квадрат, получим: 2 i2 ЦМ 2ri2 2ЦМ , ri . Используем свойство аддитивности кинетической энергии, запишем: T Ti m2 mii2 m 2r 2 i ЦМ i i 2 miЦМ , ri . 2 2 2 В полученном выражении последнее слагаемое равно нулю, т. к. и m , r , m r , (m r ), i вектор m r m i r i i ЦМ i ЦМ i i ЦМ i i по определению равен радиус-вектору центра масс тела, i который равен нулю в системе центра масс. Окончательно имеем: 2 ЦМ 2 mЦМ J 2 T mi mi ri . 2 2 2 2 2 2