На правах рукописи - Самарский государственный технический
реклама

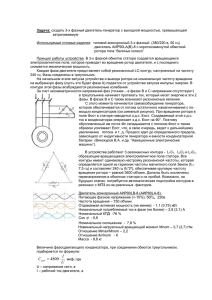
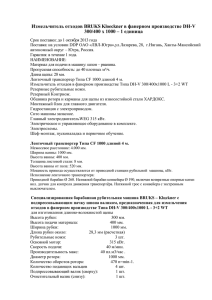
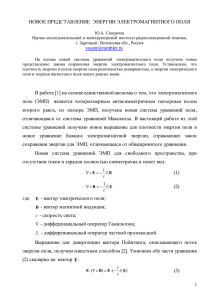
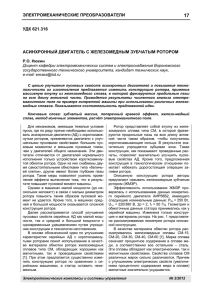
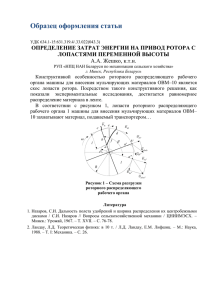
На правах рукописи Ткаченко Илья Сергеевич ОПТИМИЗАЦИЯ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ И АЛГОРИТМОВ УПРАВЛЕНИЯ РАДИАЛЬНОГО ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА. Специальность 05.09.01. – «Электромеханика и электрические аппараты». Автореферат Диссертации на соискание ученой степени кандидата технических наук Самара – 2009 Работа выполнена на кафедре Электропривода и промышленной автоматики СамГТУ, г. Самара. Научный руководитель: - доктор технических наук, профессор Кузнецов Павел Константинович, Самарский государственный технический университет. Официальный оппонент: - д.т.н., профессор Абакумов Александр Михайлович, Самарский государственный технический университет К.т.н., доцент Ермаков Виктор Васильевич Тольяттинский государственный университет. Ведущая организация: - ГОУВПО Самарский государственный аэрокосмический университет. Защита состоится «15» сентября 2009г. в 12час. 00мин. На заседании диссертационного совета Д 212.217.04 при Самарском государственном техническом университете по адресу г.Самара, ул. Молодогвардейская, д.244, Первый корпус, ауд. 4А С диссертаций можно ознакомиться в библиотеке СамГТУ, а авторефератом диссертации на официальном сайте СамГТУ, http://www/samgtu.ru/ Отзывы по данной работе в двух экземплярах, заверенные печатью, просим отправлять по адресу Россия, г.Самара, Молодогвардейская ул. д.244, Главный корпус, Самарский государственный технический университет, ученому секретарю диссертационного совета Д 212.217.04 Тел.:(846)2784-496, факс (846)278-44-00, e-mail: [email protected] Автореферат разослан «16» июля 2009г. Ученый секретарь диссертационного совета Д 212.217.04 Кандидат технических наук, доцент Е.А. Кротков ОБЩАЯ ХАРАКТЕРИСТИКА ДИССЕРТАЦИОННОЙ РАБОТЫ. Актуальность темы. Во многих механизмах, содержащие вращающиеся роторы, традиционные подшипники качения или скольжения не могут обеспечить жесткие требования по коэффициенту трения, ресурсу работы, экологической безопасности. К таким механизмам относятся высокоскоростные электродвигатели, турбины, ультрацентрифуги, гироскопы, гиродины. Для этих машин в последние десятилетия в технически развитых странах, включая Россию, создаются системы электромагнитных подвесов (ЭМП) роторов, включающие радиальные и аксиальные подшипники. Применение ЭМП в этих агрегатах дает возможность снизить энергопотребление, достичь предельных для материалов роторов частот вращения, исключить маслосистему жидкостной смазки, тем самым снизить пожароопастность объектов и экологические риски при их эксплуатации. Благодаря научному вкладу отечественных и зарубежных ученых А.И. Бертинова, В.Б. Метлина, Ю.Н. Журавлева, Braunbek W. и др. основные принципиальные технические задачи левитации успешно решены. Однако разработчикам ЭМП в условиях жесткой конкуренции с традиционными подшипниками приходится сталкиваться с проблемами снижения массы и габаритов устройств, их энергопотребления и повышения точности, надежности и быстродействия. Решение этих задач невозможно без решения задачи оптимизации ЭМП на основе адекватной математической модели. Большие перспективы заложены и в решении задач синтеза системы управления ЭМП. Эти вопросы ни в отечественной, ни в зарубежной литературе в достаточной мере не освещены. Учитывая изложенное, можно сделать вывод, что совершенствование систем ЭМП соответствует стратегическому направлению развития электромашиностроения и автоматики, а решение научных задач лежащих в их основе – актуальная задача исследования. Цель работы. Разработка радиальных ЭМП (РЭМП) с минимальным энергопотреблением, улучшенными массогабаритными и динамическими характеристиками. Задачи исследования: 1. Разработать математическую модель для оптимизационного расчета РЭМП, исследовать рельеф поверхностей отклика целевой функции, на основании исследования выбрать алгоритм оптимизации и оптимизировать подвес по заданным параметрам. 2. Синтезировать СУ ЭМП и провести параметрический синтез регуляторов. 3. Рассмотреть вопросы технической реализации СУ ЭМП ротора средствами аналоговой и цифровой техники. Методы исследования. Решение поставленных задач в диссертационной работе основано на аналитических и графических методах, методах компьютерного моделирования, матричного анализа, физического моделирова- ния, методах синтеза систем регулирования, математического аппарата анализа и синтеза САУ. Достоверность полученных результатов. Достоверность результатов диссертационной работы подтверждена результатами экспериментальных исследований на физических макетах, опытных образцах. Научная новизна. Научная новизна работы представлена теоретическими и экспериментальными исследованиями, основное содержание которых отражено в следующих рассмотренных и решенных задачах: 1. Проведен сравнительный количественный и качественный анализ конструктивных схем магнитных систем РЭМП, способов питания обмоток управления и даны рекомендации по их рациональному применению. 2. Разработан алгоритм и составлена программа расчетной модели математического синтеза РЭМП, которая позволяет повысить точность оптимизационного расчета по сравнению с известными методиками за счет: а) более точного учета формы кривой магнитной индукции в конструкции с распределенной обмоткой; б) точного расчета воздушного зазора под каждым зубцом при отклонении ротора от центрального положения; в) учета нелинейного магнитного сопротивления стальных участков магнитопровода методом зубцовых контуров при несимметричном питании обмоток. 3 Построена система регулирования с учетом внутренней положительной обратной связи в объекте управления, отвечающая требования точности и быстродействия РЭМП. Практическая ценность работы. 1. Алгоритм и программа расчета усилий методом зубцовых контуров позволяет решать задачи анализа РЭМП – при заданных конфигурации магнитной системы и распределении токов по пазам с учетом насыщения магнитной системы и смещения ротора, определить вектор результирующей электромагнитной силы. 2. Разработанная система подчиненного регулирования электромагнитным подвесом может быть использована как в агрегатах с большими массогабаритными показателями, так и в высокоскоростных приводах с небольшой массой ротора. 3. Алгоритмы и программы расчета ЭМП используются в учебном процессе на электротехническом факультете СамГТУ при курсовом и дипломном проектировании. Макетный образец электродвигателя с ЭМП ротора изучается при проведении лабораторных работ по курсу «Специальные электрические машины». Основные положения, выносимые на защиту. Результаты анализа конструктивных схем РЭМП и рекомендации по их применению. Уточненные зависимости электромагнитных усилий от смещения ротора и токов в катушках электромагнитов при различных законах управления. Расчетная модель математического синтеза, позволяющая рассчитывать статические характеристики и динамические параметры РЭМП. Постановка задачи оптимизации РЭМП и методика ее реализации, основанная на исследовании поверхностей отклика и методе случайного поиска с обучением и применением аппарата штрафных функций. Система регулирования РЭМП с учетом внутренней положительной обратной связи в объекте управления. Внедрение результатов работы. Работа является частью комплекса научных исследований кафедр «Электропривод и промышленная автоматика» и «Электромеханика и нетрадиционная энергетика» Самарского государственного технического университета по теме «Системы электромагнитного подвеса роторов энергетических машин» научно - технической программы Минвуза РФ «Научные исследования высшей школы по приоритетным направлениям науки и техники» (Подпрограмма 206 «Топливо и энергетика», раздел 206.01 «Перспективные технологии производства и транспорта тепловой и электрической энергии» НИР №528/01). А также целевой программы по энергосбережению РАО «ГАЗПРОМ»: тема 1.1.8 «Разработка структурных схем технологических процессов на базе частотно - регулируемых электроприводов и анализ экономической эффективности их применения на предприятиях РАО «ГАЗПРОМ», подтема 3: «Технико-экономическое обоснование использования и разработка электромагнитных подшипников для электроприводных ГПА». Апробация работы. Основные положения диссертационной работы докладывались, обсуждались и одобрены: - на Второй Всероссийской научно-практической конференции «Перспективные системы и задачи управления» г. Таганрог 2007г. - на научно-технических семинарах кафедры АУПУ и ТП Самарского государственного технического университета (2003-2006г.г.) Публикации. По основным результатам диссертационной работы опубликованы 5 печатных работ в издании, рекомендованном ВАК РФ. Подана заявка на изобретение на систему управления электромагнитным подвесом ротора № М. Кл6. H 02 K 7/09. Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения, библиографического списка и приложений. Основная часть работы изложена на 193 страницах машинописного текста, иллюстрирована рисунками и таблицами. Библиографический список содержит 151 наименование на 14 страницах. КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ. В ведении обоснована актуальность темы работы. Отражены разработки российских ученых, к которым можно отнести следующее: Под редакцией профессора МАИ А.И. Бертинова впервые в отечествен- ной литературе В.Б. Митлин систематизировал виды ЭМП и разработал основы проектирования электростатических и электромагнитных подвесов. Под руководством Ю.Н. Журавлева в Псковском политехническом институте была создана научно- техническая лаборатория АЭМП, которая внесла значительный вклад в применение активного подвеса для высокоскоростных металлообрабатывающих шлифовальных и металлорежущих инструментов. В СССР (затем в России) важные практические успехи разработки и применения ЭМП в космических программах связаны с трудами ученых и инженеров ВНИИЭМ. Гироскопы и гиродины орбитальных станций «Салют» и «Мир» имели электромагнитные подвесы роторов, разработанные во ВНИИЭМ. В последнее время институтом успешно внедрен ряд проектов по активному подвесу для газоперекачивающей отрасли и крупных электрических машин. В первой главе приводится анализ зависимостей электромагнитных усилий от конструктивных и обмоточных параметров радиального ЭМП. Анализируются формы кривых намагничивающих сил и магнитной индукции для различных конструкций статора. Аппроксимируется зависимость усилия от величины зазора под зубцами статора и смещения ротора, обосновывается выбор схемы питания катушек. Из формулы Максвелла (1) следует, что электромагнитное усилие f x определяется габаритами подшипника и квадратом индукции в зазоре B 2 . fx 2 B 2 lD lD 2 2 cos d B cos d , 4 0 4 0 1 1 (1) l – активная длина статора, м; D - диаметр расточки статора, м; 0 - магнитная проницаемость вакуума, Гн/м; - угловая координата, рад. Следовательно, необходимо знать, какая магнитная система обеспечит при прочих равных условиях большую индукцию. А значение индукции определяется величиной намагничивающей силы (Н.С.) и фактическим зазором между статором и ротором. В радиальных подшипниках малой грузоподъемности применяют явнополюсные магнитные системы индукторов. Чаще – внешнюю, реже – с внутренним индуктором. Особенностью явнополюсной конструкции является сильное влияние соседних полюсов друг на друга. Увеличение потока одного полюса невозможно без увеличения потоков смежных с ним полюсов. Второй тип конструкции – это системы с распределенными обмотками. Распределенная обмотка с числом полюсов, равным числу токовых зон является разновидностью конструкции с общими потоками соседних токовых зон. Этой схеме присущи достоинства и недостатки явнополюсных систем, а именно – возможность создания мощных электромагнитных усилий при сильном влиянии соседних токовых зон. Компромиссной конструкцией является распределенная восьмиполюсная схема. При симметричном распределении токов только часть потока фазовой зоны замыкается через соседнюю. Причем это потоки крайних зубцов зоны, усилие которых направлены к оси управления под большим углом, и, следовательно, проекция их сил на соответствующую ось мала. Проведен сравнительный анализ конструктивных схем с магнитнозависимыми и магнитно развязанными токовыми зонами. Результат расчета относительных значений суммарных усилий по оси ОХ для двух типов конструкций говорит о том, что при отсутствии насыщения суммарные усилия для двух типов схем различаются на 8,6% в пользу независимой магнитной системы с распределенной обмоткой. Ее мы и будем использовать в дальнейшем в наших расчетах. При синтезе системы управления необходимо иметь аппроксимирующие зависимости электромагнитного усилия от смещения ротора ex* из номинального положения. Исходя из формулы Максвелла получено следующее выражение: (2) 4 ex* f A x 1 2 ex*2 ex*4 где А– постоянный коэффициент для конкретной машины. ex* - проекция смещения ротора от центрального положения на ось OX в относительных единицах. Базовое значение – номинальный зазор. Из анализа результатов расчета можно сделать следующий вывод: любая из линейных аппроксимаций будет приводить к существенным погрешностям в настройке системы, работающей с большими отклонениями ротора от номинального положения. Поэтому при синтезе системы, линейной моделью связи можно воспользоваться только для расчета работы в номинале. А для режима подъема ротора и аварийного выбега нужно учитывать нелинейности. Для синтеза системы управления по программе математической модели радиального ЭМП были рассчитаны кривые зависимостей электромагнитной силы, действующей по оси ординат f y* в относительных единицах для одного из вариантов ЭМП и четырех способов управления. Усилия считались для статического режима при центральном положении ротора. Из анализа результатов расчета сделан вывод о преимуществах дифференциального закона управления. То есть закон, при котором сумма токов в противоположных катушках, расположенных на одной оси, остается постоянной. Результаты расчета использованы при синтезе системы в третьей главе данной работы. Во второй главе сформулирована постановка задачи оптимизации РЭМП, выбраны критерии (параметры) оптимизации и варьируемые факторы. На основе анализа функциональных связей составлена математическая модель магнитной системы и получены поверхности отклика для различных параметров оптимизации. Приведены примеры оптимизации ЭМП для свободной газовой турбины наземного газоперекачивающего агрегата (ГПА) методом случайного поиска с обучением. Области применения активных электромагнитных подшипников - гироскопы, турбонагнетатели, авиационные двигатели наземного применения, высокоскоростные электродвигатели и электрошпиндели, - определяют основные требования, которым должны отвечать современные системы ЭМП. Эти требования должны лечь в основу выбора параметра (параметров) оптимизации магнитной системы подвеса. Из анализа общих требований к РЭМП были выбраны следующие основные критерии качества подвеса: тяговое усилие, масса, габариты, потребляемая мощность. Так как параметров оптимальности несколько, то оптимизировать РЭМП предлагается с помощью так называемого обобщенного параметра (критерия) оптимальности. Из перечисленных выше критериев тяговое усилие будем учитывать как базовую величину. Для того чтобы производить сравнение ЭМП с разными силовыми характеристиками остальные параметры (массу, объем и потребляемую мощность) будем рассчитывать на единицу тягового усилия. Для построения обобщенного параметра воспользуемся обобщенной функцией желательности Харрингтона, в основе которой лежит идея преобразования натуральных значений частных параметров в безразмерную шкалу предпочтительности. Например, для массы: m* exp exp y m (3) где m* - относительное значение параметра, в нашем случае – массы, по шкале желательности; ym - трансформированное значение массы по эмпирической шкале. Шкала выбирается исходя из минимально удовлетворительного значения m. Для остальных параметров оптимизации выражения для их нормализованных значений в относительных единицах получены аналогично. В итоге обобщенный параметр оптимизации выразится как сумма относительных частных параметров, умноженных на соответствующее весовые коэффициенты: Y m m* V V * P P* , (4) Для нахождения оптимального варианта РЭМП нужно найти максимальное значение обобщенного параметра Y, что будет соответствовать компромиссным минимальным значениям массы, объема и потребляемой мощности. Основой оптимизационного расчета РЭМП стала предлагаемая математическая модель (ММ), связывающая варьируемые факторы, параметры ли- митеры, определенные физическими, техническими и иными ограничениями с функцией цели – в данном случае обобщенным параметром оптимизации Y. Ядром ММ электромагнитной системы РЭМП является алгоритм, основанный на методе зубцовых контуров с учетом насыщения стальных участков. Начало 1 Ввод констант Подпрограмма решения системы уравнений методом Гаусса Кривые намагн., обм. провод Геометрия статора Dmuz(i)>ez Расчет катушек да Подпрограмма корректировки muz(i) да Подпрограмма корректировки mua(i) да Подпрограмма корректировки muj(i) i=i+1 Ввод ex, ey Dmua(i)>ea Расчет Eps(i), cosF(i) i<=n Dmuj(i)>ej нет KU=ku+dku ik1,ik2, ik3,ik4 KU<=0,5 нет Расчет f(i), cosF(i) Расчет fsumm, cosF, fx, fy да ns(i) must(i)=must0 Rz(i), Ra(i), Rj(i) Расчет матрицы коэффициентов 1 Для решения нелинейной системы уравнений был предложен алгоритм, основанный на методе Гаусса и способе последовательных приближений с коррекцией шага итераций. Алгоритм, блок-схема которого устойчиво работает для числа пазов n 16 , 24 и 48 . Адекватность предложенной ММ была проверена в ходе эксперимента на макетном образце ЭМП ротора асинхронного двигателя мощностью 1,5 кВт с массой ротора 7,5 кг. Максимальное расхождение расчетного статического усилия от экспериментального значения не превышало 11%. Математическая модель (реализованная в программе “GL_RAS3”) расчета радиального электромагнитного подшипника, позволяет получить основные геометрические, энергетические и обмоточные характеристики подвеса. По результатам расчета были получены поверхности отклика выходных параметров РЭМП (массы, объема, потребляемой мощности) при варьировании входных факторов в широком диапазоне. В качестве варьируемых факторов использовались пять величин: , (del) –номинальный воздушный зазор между статором и ротором , м; jст , (jst) – плотность тока в обмотке статора, А/м2; B m1 , (bm1) – амплитуда индукции в зазоре под активным полюсом, Тл; B m 3 , (bm3) – амплитуда индукции в зазоре под пассивным полюсом, Тл; , (lambd) – относительная длина подшипника, о.е. Кроме независимых факторов в модели учитывались и параметрылимитеры, ограниченные физическими или иными допустимыми значениями. В качестве примера по программе “GL_RAS3” были проведены расчеты РЭМП для ротора свободной турбины наземного газотурбинного двигателя НК-14СТ. со следующими параметрами: (максимальное радиальное усилие – 3000 Н; частота вращения – до 20000 об/мин; динамические перегрузки отсутствуют; конструкция статора – неявнополюсная; число полюсов (каналов управления) – 4; число пазов (зубцов) статора – 24; охлаждение воздушное, принудительное). Невозможно графически иллюстрировать гиперповерхность пятого порядка, каковой является в данном случае поверхность отклика РЭМП. Поэтому на рисунке показаны поверхности уровней для массы и потребляемой мощности (частные параметры) в зависимости от изменения двух переменных - воздушного зазора (del) и относительной длины машины (lambd) Поверхность отклика. Мощность 1 P,Вт del,mm 800 0,8 600 0,6 400 0,4 200 0,2 0,4 0,9 1,4 Lambd,о.е . Рис. 1. - поверхности уровней для массы и потребляемой мощности (выходные параметры) в зависимости от изменения двух переменных - воздушного зазора (del) и относительной длины машины (lambd). Очевидно, что области оптимальных значений для массы и потребляемой мощности не совпадают. Поэтому для получения компромиссного варианта были рассчитаны поверхности отклика для обобщенного параметра оптимизации Y . Рис. 2 - Пример поверхности отклика для обобщенного параметра оптимизации Y, синтезированного в виде суммы трех частных параметров m*, V*, P1* (масса, объем и потребляемая мощность, все в о.е.)(верхний) и произведения(нижний). В данном примере коэффициенты значимости при частных параметрах приняты равнозначными * m *V * P 1 . На рисунке 2 слева представлена поверхность отклика для случая, когда обобщенный параметр вычислялся в виде суммы, а спрва - произведения частных откликов. Оптимальные значения в обоих случаях лежат в области изменения параметров 3...3,6 0 ,1мм Максимум значения Y, построенного в виде суммы Y max 2.89 , а максимум Y, полученного, как произведение частных откликов Y 1 max 0.90 , что соответствует абсолютным значениям факторов: m=8.8 кг; P1=155,6 Вт; V=0.00265 м3, (L=0.244 м, Dн=0,104 м). (5) К сожалению, данный вариант не может быть реализован практически, так как для этого РЭМП значение зазора 0,1 мм сопряжено с недопустимыми технологическими трудностями. Оправданным, с технологической точки зрения, значением воздушного зазора для данного подшипника, считается величина порядка 0,2 мм. Если принять ее как жесткое ограничение, то значения параметров оптимизации будут: Y max 1,36 , Y 1 max 0.413 , m=12,8 кг, P1=297,3 Вт, V=0.00316 м3, (L=0.244 м, Dн=0,114 м). Анализ результатов по поверхностям откликов позволил определить предварительное положение области оптимума исследуемого РЭМП: опт 0 ,16...0 ,2 мм ; опт 1,7...2 ,2о.е. ; j опт 7,5...8,5 А / м 2 ; (6) Следует отметить предварительный характер полученных результатов, так как исследование поверхностей отклика по двум параметрам из пяти (три зафиксированы как постоянные) не может гарантировать, что оптимум лежит в получившихся границах. Только исследование гиперповерхности пятого порядка одним из методов оптимизации может дать гарантированный результат отыскания глобального экстремума. В основу алгоритма поиска оптимума (программа "mb_opt") положен метод случайного поиска с самообучением, дополненный на границах области определения механизмом штрафных функции. На рисунке 5 в качестве иллюстрации показана динамика оптимизации обобщенного параметра Y1 в ходе поэтапного поиска (9 этапов обучения). На этапах 1-2-3-4-5-6-7-8 движение осуществляется по направлению, близкому к антиградиенту Y1. На последнем этапе 8-9 движение происходит вдоль границы области допустимых значений одного из варьируемых факторов (магнитной индукции). Динамика движения по поверхности отклика к точке оптимума. jst, A/мм 2 1 11 10 2 4 3 6 5 9 8 7 8 7 6 5 1 1.1 1.2 1.3 1.4 Bm1, Тл Рис. 3 - Динамика движения по поверхности отклика при варьировании двух факторов. Приведенная иллюстрация показывает, что выбранный метод хорошо работает как внутри области определения, так и на ее границе. Уточним, что рис.3 лишь иллюстрация поиска оптимума по двум факторам. Программа же оперирует с гиперповерхностями четвертого и пятого порядка, которые графически проиллюстрированы быть не могут. В результате оптимизационного расчета с использованием штрафных функций удалось повысить полученное значение Y с 1,36 до 2,21 о.е., что соответствует: - снижению массы активной части до 10,2кг (на 2,6кг или 25%) - снижению потребляемой мощности до 287 Вт (на 10,3 Вт или на 4%) - уменьшению наружного диаметра до 108мм (на 6мм или на 6%). В таблице 1 приведены результаты сравнения оптимизированного РЭМП с отечественным и зарубежным аналогами. Параметр F, Н Dнар, мм L, мм V, дм^3 m, кг F/V, Н/дм^3 F/m, Н/кг Actidyne (S2M) (Франция), модель Pi46 3000 115 239 3,16 Нет данных 949,4 - Псковская инженерная компания По данным Ю.Н.Журавлева 1800 236 82 4,57 8,4 393,9 214,3 Таблица 1 Результаты оптимизации 3000 108 244 2,84 10,2 1056,3 294,1 По удельному объемному усилию спроектированный РЭМП находится на одном уровне (незначительно превосходя) с французским аналогом и существенно превосходит отечественный прототип. По удельному массовому усилию выигрыш составляет более 30%. В третьей главе рассмотрена математическая модель радиального электромагнитного подшипника как объекта управления. Синтезирована система управления электромагнитным подвесам ротора методами систем подчиненного регулирования и проведен параметрический синтез регуляторов. Построены переходные характеристики одного канала системы управления по отношению к управляющему и основному возмущающему воздействию. Показано, что синтезированная система обладает высокими динамическими и статическими показателями. Получены аналитические выражения, позволяющие определить максимально допустимую величину постоянной времени апериодического фильтра в регуляторе. Проанализирована математическая модель одного канала управления радиального электромагнитного подшипника. Вследствие того, что в общем случае радиальный подшипник должен обеспечивать компенсацию веса G ротора, оси электромагнитов повернуты на 45 градусов относительно вертикальной оси. Это позволяет распределить нагрузку между электромагнитами ЭМ1 и ЭМ2. В соответствии с расчетной схемой и принятого закона регулирования токов (дифференциальный закон управления) составлена система уравнений и построена структурная схема одной оси радиального электромагнитного подшипника (Рис.4). k E1 p N 0.5 (-) I1 U k ШИМ 0.5 k I (-) FЭМ 0 FВX 1 mp 2 1 R1 ( T1 p 1) I3 (-) U x G X (-) 1 R3 (T3 p 1) FX kF 0.5 kE 3 p Рис.4 - Структурная схема одной оси радиального электромагнитного подшипника. Здесь Т1 и Т3 - постоянные времени электрических цепей электромагнитов ЭМ1 и ЭМ3. На структурной схеме постоянным смещением на величину 0.5 учтено, что широтно-импульсный модулятор при нулевом сигнале задание N =0 имеет на своем выходе скважность =0,5. Анализ приведенной структурной схемы показывает, что процесс левитации ротора в поле электромагнитов нелинейный и нестационарный. Нелинейность объекта обусловлена нелинейностью зависимости FЭМ 0 ( k I ) и делительным звеном, связывающим коэффициент k I с соотношением токов I1 и I 3 . Нестационарность объекта вызвана вариациями параметров k ЭМ , k FX , k E 1 , k E 3 L1 , L3 в функции перемещения x , а также изменением сопротивлений R1 и R3 в функции температуры. Тем не менее, для структурного и параметрического синтеза системы управления найдена линеаризованная математическая модель радиального электромагнитного подшипника по одной оси в виде системы уравнений и структурной схемы. Если обмотки электромагнитов выполнены с одинаковыми индуктивностями и активными сопротивлениями, а движение ротора осуществляется при малых отклонениях от центрального положения (т. е. k E 1 k E 3 k E ), линеаризованная структурная схема одной оси радиального электромагнитного подшипника упрощается. Отличительной особенностью электромагнитного подшипника является наличие положительной обратной связи по перемещению, отражающая изменение силовых характеристик электромагнитов в зависимости от воздушного зазора. Передаточная функция радиального электромагнитного подшипника представляет собой динамическое звено третьего порядка, причем с наличием отрицательных коэффициентов характеристического уравнения. WОУ ( p) x( p) N ( p) k ШИМ kЭМ mT m 2 kЭМ k E kF Э p3 p TЭ p 1 kF k FU kF (7) В работе синтезирована двухконтурная система подчиненного регулирования электромагнитным подшипником с внутренним контуром скорости и внешним контуром положения ротора в поле электромагнитов (Рис.5). FВХ ( p ) x З ( p) W РП ( p ) (-) W РС ( p) k ШИМ U (-) (-) k ЭМ U (TЭ p 1) k ОСС p 1 mp 2 x( p) kF kE p k ДП Рис.5 - Структурная схема одного канала системы подчиненного регулирования электромагнитного подвеса ротора В соответствии с общей методикой синтеза регуляторов систем подчиненного регулирования пренебрежем положительной обратной связью по перемещению с коэффициентом передачи k F , оценивая впоследствии ее влияние на статические и динамические свойства проектируемой системы. Как для контура скорости (внутреннего), так и для контура положения (внешнего) используем стандартную настройку на технический оптимум. В качестве регулятора скорости в системе подчиненного регулирования электромагнитного подвеса ротора должен быть использован пропорционально-интегрально-дифференциальный регулятор с апериодическим фильтром на выходе. Причем, постоянная времени апериодического фильтра равна малой постоянной времени T , величину которой можно выбирать произвольно, исходя из требуемого быстродействия системы (8). Для настройки внешнего контура положения на технический оптимум требуется пропорциональный регулятор с коэффициентом передачи в соответствии с выражением. Быстродействие системы при отработке управляющего воздействия определяется полностью величиной малой постоянной времени T . mU mU TЭ p 2 p 1 k k k E k ЭМ WРС ( p) E ЭМ 2k1T p(T p 1) WРП ( p) k РП WЗАМ 2 ( p) (8) kОСС 4T x( p) 1 3 3 xЗ ( p) k ДП (8T p 8T2 p 2 4T p 1) Приведенные выше результаты по выбору регуляторов, определению передаточных функций замкнутой системы и, следовательно, статических и динамических характеристик электромагнитного подвеса ротора получены в пренебрежении положительной обратной связью по перемещению, поэтому необходимо оценить ее влияние. Найдена передаточная функция замкнутой системы управления электромагнитного подвеса ротора по отношению к управляющему воздействию x З ( p) и возмущающему с учетом положительной обратной связи по перемещению. Проведено моделирование системы управления в программной среде «MATLAB SIMULINK». Переходный процесс, построенный по этой передаточной функции, показывает, что показатели качества регулирования практически совпадают с аналогичными результатами, полученными без учета положительной обратной связи по перемещению (Рис.6,7). Рис.6 - График переходного процесса по управляющему воздействию без учета положительной обратной связи по перемещению(слева) и с учетом(справа). Рис.7. - Переходный процесс по возмущению с учетом (слева) и без (справа) положительной обратной связи по перемещению Fв=100 Н Переходные процессы показывает, что показатели качества регулирования практически совпадают с аналогичными результатами, полученными без учета положительной обратной связи по перемещению (рис. 6,7). Время переходного процесса (рис.6 слева) t ПП = 0,00148 с, перерегулирование ( = 7 %). Время переходного процесса на графике (рис. 6 справа) составляет t ПП = 0,00149 с, а перерегулирование – = 7,4 %. Следовательно, при выбранных структуре и параметрах регуляторов положительная обратная связь не оказывает существенного влияния на работоспособность системы управления электромагнитным подвесом ротора. Применим алгебраический критерий Раусса - Гурвица для определения границы устойчивости системы управления электромагнитным подвесом ротора с учетом положительной обратной связи по перемещению. Получили, что диапазон возможных изменений малой постоянной времени находится в пределах от 0 до 1,067×10-3 с. Во всех представленных расчетах величина T принята равной 0,0001 с. Предлагаемый подход к выбору малой постоянной времени апериодического фильтра справедлив для любого электромагнитного подвеса ротора, использующего подобную систему подчиненного управления электромагнитами. В четвертой главе рассмотрены вопросы технической реализации системы управления электромагнитным подвесом ротора как средствами аналоговой, так и цифровой техники. Найдены дискретные передаточные функции отдельных элементов и системы в целом, позволяющие судить о влиянии процесса квантования по времени в цифровом управляющем устройстве на работоспособность системы управления электромагнитным подвесом ротора. Проанализировано влияние помех измерения положения ротора на выделение сигнала пропорционального скорости перемещения с помощью дифференцирующего устройства. Показано, что с учетом действия периодических помех измерения система управления электромагнитным подвесом ротора сохраняет работоспособность. Построены структурные схемы, учитывающие импульсный характер передачи воздействий. Найдены дискретные передаточные функции регуляторов и замкнутой цифровой системы в целом. При этом предложено роль апериодического фильтра возложить собственно на динамический процесс квантования по времени T T . 2 Дискретная передаточная функция позволяет исследовать устойчивость цифровой системы управления радиального электромагнитного подшипника, а также ее динамические характеристики по отношению к управляющему воздействию. Сравнение переходных характеристик, рассчитанных для аналогового прототипа системы управления радиального электромагнитного подшипника и для цифровой системы, показывает, что квантование по времени оказывает влияние на характер и время переходного процесса. Этот факт легко объясним, поскольку применение квантования по времени соответствует введению в систему управления дополнительной инерционности. Тем не менее, при цифровой технической реализации система управления сохраняет работоспособность и обладает высокими динамическими показателями. ЗАКЛЮЧЕНИЕ. В работе получены следующие основные результаты: 1. Проведен сравнительный количественный и качественный анализ конструктивных схем магнитных систем РЭМП, способов питания обмоток управления и даны рекомендации по их рациональному применению. 2. Разработана расчетная модель математического синтеза РЭМП, позволяющая исследовать рельеф поверхностей выходных параметров. 3. Разработана программа оптимизации, основанная на методе случайного поиска с обучением, с использованием аппарата штрафных функций в зонах ограничений. По результатам оптимизации рассчитан с участием автора ЭМП ротора свободной турбины наземного газотурбинного двигателя НК-14СТ. Адекватность расчетов была подтверждена испытаниями макетного образца РЭМП асинхронного двигателя массой ротора 7,5 кг. 4. Синтезирована система управления электромагнитным подвесом ротора методами систем подчиненного регулирования, произведен параметрический синтез регуляторов и показано, что синтезированная система обладает высокими динамическими и статическими показателями. 5. Найдена граница устойчивости синтезированной системы, выраженная через параметры электромагнитного подвеса ротора и параметры регуляторов. 6. Решены вопросы технической реализации системы управления электромагнитным подвесом ротора как средствами аналоговой, так и цифровой техники. Материалы диссертационной работы, выводы и рекомендации были использованы при реализации целевой программы по энергосбережению РАО «ГАЗПРОМ». Использование материалов диссертационной работы в учебном процессе на электротехническом факультете СамГТУ подтверждается приложенным актом. Основное содержание работы отражено в следующих публикациях 1. Ткаченко И.С, Макаричев Ю.А.,Стариков А.В.,. Синтез системы подчиненного регулирования электромагнитным подвесом ротора [Текст]// Вестник СамГТУ. Серия «Физико-математические науки» №1(14) – 2007, - с.143-148; 2. Ткаченко И.С., Макаричев Ю.А. Аппроксимация зависимости величины усилия от смещения оси ротора в радиальном электромагнитном подвесе[Текст]// Материалы Второй всероссийской научно-практической конференции «Перспективные системы и задачи управления. Таганрог,: Изд-во ТТИ ЮФУ, - с. 2007.-278; 3. Ткаченко И.С., Макаричев Ю.А. Теоретические принципы магнитного подвеса[Текст]// Вестник Самарского государственного технического университета. Серия Технические науки. №37 -2005, - с.103-107; 4. Ткаченко И.С., Макаричев Ю.А.,Стариков А.В. Сравнение эффективности конструкции радиального электромагнитного подшипника[Текст]// Вестник Самарского государственного технического университета. Серия Технические науки. №40 -2006, - с. 147-151; 5. Ткаченко И.С., Макаричев Ю.А.,Стариков А.В. Дискретная математическая модель цифровой системы управления электромагнитным подвесом ротора[Текст]// Вестник СамГТУ. Серия «Физико-математические науки» №2(15) – 2007, -с. 186-188. Личный вклад автора. В работах, написанных в соавторстве, автору принадлежат: вывод уравнений и синтез системы управления [1,5], расчеты и анализ результатов [2,4], анализ теоретических принципов ЭМП [3]. Разрешено к печати диссертационным советом Д 212.217.04 Протокол №8 от 1.07.09