Настройка контура регулирования
реклама

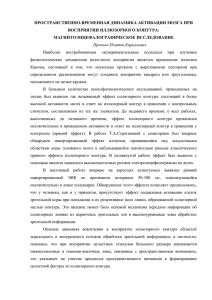
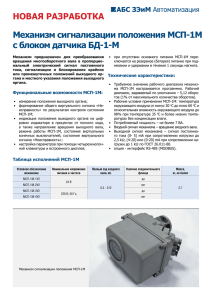
ООО “ТБН Энергосервис” Математическое обеспечение изделия РТ2 и РТ2М Руководство оператора ООО “ТБН Энергосервис – Киров” 16.12.2014 Оглавление Введение ...................................................................................................................................................... 2 Общие сведения .......................................................................................................................................... 2 Каналы ввода вывода ............................................................................................................................. 2 Контура регулирования ......................................................................................................................... 2 Алгоритм регулирования “ГВС”.................................................................................................................. 2 Алгоритм регулирования “Отопление” ..................................................................................................... 3 Приоритетность регулирования в режиме отопления ........................................................................ 3 Как работает регулятор? ............................................................................................................................. 4 ПИД регулятор ............................................................................................................................................. 4 Управление посредством аналогового выходного сигнала .................................................................... 7 Управление посредством дискретного выходного сигнала .................................................................... 7 Настройка контура регулирования ............................................................................................................ 8 Настройка пропорциональной компоненты......................................................................................... 8 Настройка интегральной компоненты .................................................................................................. 8 Настройка дифференциальной компоненты ........................................................................................ 8 Подстройка контура регулирования .......................................................................................................... 8 Введение Руководство оператора (далее по тексту - РО) включает в себя общие сведения, необходимые для правильной настройки и эксплуатации регуляторов температуры, микропроцессорных РТ-2М (далее по тексту – регулятор, прибор или изделие). Общие сведения Каналы ввода вывода Регулятор имеет 51 физических каналов измерения аналогового сигнала, 2 канала ЦАП, один интерфейсный канал связи с приборами серии КМ-5..РМ-52 и 6 каналов дискретного управления. Контура регулирования Изделие имеет в своем составе 4 контура регулирования (2 контура аналогового регулирования, 2 контура дискретного регулирования). Первые два контура имеют возможность выбрать тип алгоритма регулирования: ГВС Отопление Контура регулирования имеют такую сущность, как параметры измерения. Каждый из контуров имеет фиксированное количество параметров измерения. Количество параметров зависит от алгоритма работы контура. Параметр измерения конфигурируется путем выбора физического канала измерения, в качестве источника значения сигнала. Таким образом, источником сигнала может быть любой из 51 аналоговых или двух интерфейсных каналов измерения. Таким образом, с помощью параметров измерения оба типа алгоритмов всего лишь вычисляют величину текущего задания на регулирования и, сравнивая ее с параметром регулирования, выдают управляющий сигнал, рассчитываемый по алгоритму ПИД (пропорционального, интегрального и дифференциального) регулирования. Вторые два контура работают по алгоритму управления насосной станцией. В данном документе подробно описываются особенности алгоритма ПИД регулятора, используемого первыми двумя контурами регулирования. Алгоритм регулирования “ГВС” Этот алгоритм использует только один параметр измерения аналоговой величины. Обычно на него конфигурируется физический канал с датчиком температуры, измеряющий температуру горячей воды (регулируемый параметр). Задание для данного типа контура задается в виде 1 5 каналов АЦП подразумевается в изделии РТ2М, прибор РТ2 имеет 4 канала аналогово-цифрового преобразования. 2 Интерфейсный канал связи позволяет сформировать до 2-х дополнительных каналов измерения физической величины. фиксированного значения. По желанию пользователя, алгоритм ГВС позволяет менять это задание автоматически, путем подключения соответствующей поправки3. Алгоритм регулирования “Отопление” Контур, настроенный на логику регулирования “Отопление” использует до 4 параметров измерения аналоговой величины. Это: T отп. – температура отопления объекта регулирования (регулируемый параметр) T н.в. / Т под. – температура наружного воздуха или температура теплоносителя подающего трубопровода. Т обр. – температура обратного трубопровода – используется, как дополнительный алгоритм контроля температуры обратного трубопровода. Т вн. п. – дополнительная температура, не использующаяся в алгоритме регулирования, но требующая фиксации в архиве значений параметров. К примеру: температура внутри помещения объекта регулирования. Первые два параметра измерения являются обязательными, подключение третьего параметра ведет к подключению ПРИОРИТЕТНОГО КОНТРОЛЯ данного параметра, подключение четвертого, позволит иметь еще один косвенный источник определение качества регулирования обслуживаемого объекта. Использование параметров подробно изложено в руководстве по эксплуатации изделия. Приоритетность регулирования в режиме отопления Имеются 3 приоритета в регулировании контура отопления. 1. - штатное регулирование по датчику отопления (Тотп) (низший приоритет). 2. - при подключении датчика Тобр появляются еще два приоритета: контроль Тобр на завышение относительно табличной уставки (задается графиком максимальной обратки) - регулирование по датчику обратной сетевой температуры (Тобр)- приоритет средний контроль Тобр4 на занижение относительно фиксированного (задаваемого параметра МИН.Тобр) - регулирование по датчику обратной сетевой температуры (Тобр) наивысший приоритет При активации любого из, более высших, приоритетов, регулирование осуществляется только по выбранной логике, не спускаясь на задачу с наименьшим приоритетом. Данная блокировка (из режима с текущим приоритетом регулирования прибор не может перескочить на режим регулирования с, более низшим, приоритетом, если даже параметры пришли в норму) служит для предотвращения постоянного перехода регулятора с одной системы 3 Прибор поддерживает 4 вида поправок задания – (отсутствие поправки, ночное снижение, поправку рабочих и выходных дней и поправку по дням недели). 4 на данный момент доступен в версии 1.74 регулирования на другую и обратно. Перескакивание из системы в систему может привести к нестабильности объекта регулирования. Сброс флагов активности приоритетных задач осуществляется изменением и сохранением любого из доступных параметров. Если после этой процедуры измерительные параметры будут находиться в норме, управление перейдет на задачу с наименьшим приоритетом. Как работает регулятор? Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно нарисовать так: Такая схема показывает управление по ошибке (или по отклонению). Это значит, что для того, чтобы регулятор начал действовать, нужно, чтобы управляемая величина отклонилась от заданного значения. Блок, обозначенный знаком ≠ , находит рассогласование. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение). ПИД регулятор На входе алгоритма регулирования имеется две величины: Значение регулируемого параметра Значение задания (уставки регулирования) Смысл регулирования сводится к тому, чтобы привести значение регулируемого параметра как можно ближе к значению задания. Разницу этих двух параметров (рассогласование) назовем – “Е” – ошибкой регулирования или сигналом рассогласования. Так же, ПИД регулятор прибора, использует еще несколько величин5, способствующих успешной настройке контура регулирования. 5 На дисплее прибора их можно найти в настройках соответствующего контура в подменю “Коэффициенты регул.”. Перечислим эти величины: Период регулирования – “ПР”, задаваемый в секундах, имеет обозначение - “ПЕРИОД”. Вычисление ошибки регулирования и дальнейший расчет величины воздействия на объект регулирования производится с частотой, заданной этим параметром. Если регулятор начинает “раскачивать” систему регулирования, возможно, данный параметр слишком мал и требует увеличения, т.к. объект регулирования имеет более инертный характер и реакция на воздействие не успевает отразиться на регулируемом параметре. Коэффициент усиления – “КУ”, параметр. С помощью него можно грубо усилить или уменьшить рассчитанную величину воздействия. На дисплее он обозначен под именем “КОЭФ. УСИЛ.”. Диапазон изменения данного параметра от 0.1 до 99.9. Так же, подобно периоду регулирования, слишком большое значение данного параметра способно заставить систему войти в “раскачку”, т.е. периодически загонять регулируемый параметр намного выше и затем, ниже величины задания регулирования. Пропорциональный коэффициент – “КП”, параметр. На дисплее он обозначен, как – “ПРОПОРЦ.“. Данный параметр позволяет изменить пропорциональную составляющую, далее - “ПС”, воздействия на объект регулирования. Она вычисляется, как прямое умножение сигнала рассогласования на этот коэффициент. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. ПС = Е * КП Формула 1 – расчет пропорциональной составляющей Интегральный коэффициент – “КИ”, параметр. На дисплее он обозначен, как – “ИНТЕГР.“. Данный параметр позволяет изменить интегральную составляющую, далее - “ИС” (интеграл сигнала рассогласования), воздействия на объект регулирования, которая вычисляется, как сумма сигналов рассогласования, умноженная на этот коэффициент. Сумма обнуляется при каждой смене знака рассогласования. Интегральная составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегральной составляющей. Тем не менее, интегральная составляющая также может приводить к автоколебаниям при неправильном выборе её коэффициента. ИС = ∑Е * КИ Формула 2 – расчет интегральной составляющей Дифференциальный коэффициент – “КД”, параметр. На дисплее он обозначен, как – “ДИФФЕР.“. Данный параметр позволяет изменить дифференциальную составляющую (производную сигнала рассогласования), далее - “ДС”, воздействия на объект регулирования, которая вычисляется, как разница сигналов рассогласования на текущем и предыдущем шаге регулирования, умноженная на этот коэффициент. Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. ДС = (Е – E’) * КД Формула 3 – расчет дифференциальной составляющей Результирующее воздействие - “РВ”. Величина, рассчитанная исходя из суммы всех трех составляющих. РВ=(ПС+ИС+ДС)*КУ Формула 4 – расчет результирующего воздействия. Воздействие на объект регулирования раскладывается в зависимости от типа выходного сигнала (аналоговый / дискретный). Управление посредством аналогового выходного сигнала В данном случае РВ пропорционально самому сигналу (Шкала значений РВ равна максимальному значению выходного сигнала (10В/20мА). В этом случае интегральная составляющая Формула 4 является процентной частью текущего значением выходного сигнала и меняется от 0 до 100%. Управление посредством дискретного выходного сигнала При дискретном выходном управляющем сигнале интегральная часть, хранящая текущую позицию выходного сигнала, находится в самом контуре регулирования. При превышении РВ значения минимального времени импульса (“НАСТРОЙКА КОНТУРА – ВЫХОДНОЙ СИГНАЛ - МИН. ИМПУЛЬС” в десятых долях секунды) производится отработка воздействия в зависимости от знака на один из дискретных каналов управления (“OPEN”,”CLOSE”). Время воздействия кратно величине минимального импульса и не может быть менее последнего. После воздействия, отработанная величина вычитается из РВ. При смене знака рассогласования сбрасывается интегральная часть РВ. Полная шкала РВ для дискретного выходного сигнала равна величине, заданной в параметре “НАСТРОЙКА КОНТУРА – ВЫХОДНОЙ СИГНАЛ - ВРЕМЯ” выраженном в секундах и должна быть равна времени полного хода исполнительного механизма либо максимальном времени однократного воздействия на систему регулирования. В программе RT2Tune, при активации опции “Статистика” (см. Рисунок 1), можно наблюдать математику вычисления выходного сигнала. Текущий выход, для дискретных, как раз, выражен в величине минимальной ширины импульса, умноженной на 100 – так, при значении равном 1102, реальное значение времени воздействия на объект регулирования (время открытия клапана, знак + свидетельствует о положительном воздействии) будет равно 1,1 секунде. Т.е., при периоде регулирования 15 секунд, каждые 15 секунд будет отрабатываться величина, накопленная в параметре “Текущий выход”. Рисунок 1 Статистика регулятора Настройка контура регулирования Настройка пропорциональной компоненты Обнулим коэффициенты КИ и КД. Они нас пока не интересуют. Установим КУ=1. Будем разбираться с КП, варьируя его значение, скажем, от 1 до 100. Установим сначала значение КП, равное 1. Если система очень медленно выходит на линию, то КП надо увеличивать. Если же начинаются колебания, то КП надо уменьшать. Еще одна рекомендация: Установим сначала маленькое значение КП. Допустим, колебаний еще нет. Далее увеличиваем это значение в 10 раз, пока не начнутся колебания. Теперь уменьшаем значение коэффициента КП, но не в 10 раз, а в 2 раза. И так до тех пор, пока колебания не прекратятся. И так далее. Т.е. мы ищем искомое значение, сначала используя большие шаги, а затем все меньшие. Настройка интегральной компоненты Значение коэффициента интегральной компоненты КИ должно быть мало по сравнению c КП. В качестве начального значения коэффициента КИ рекомендуется брать число от 0.1 до 1. Процедура поиска (подбора) коэффициента КИ точно такая же, как и коэффициента пропорциональной составляющей (сначала большие шаги, а затем маленькие). Слишком большое значение коэффициента КИ также проявляется в появлении колебаний. Настройка дифференциальной компоненты Если мы уверены, что шумы в нашей системе на слишком велики, то можно ввести и дифференциальную компоненту. Для настройки КД установим сначала значение этого коэффициента, равное 0. Далее установим какое-нибудь небольшое значение коэффициента пропорционального звена КП (например, КП =1). Главное, что значение КП должно быть таким, чтобы система при нулевом значении КД не совершала колебаний. Далее установим какое-нибудь небольшое начальное значение коэффициента КД (например, КД =0.1). Будем увеличивать коэффициент КД до тех пор, пока не станут проявляться ошибочные колебания, вызванные малыми шумами. При этом колебания от слишком большого коэффициента происходят значительно быстрее, чем колебания от недостаточного коэффициента. Рекомендуется устанавливать коэффициент в половину или четверть от того, при котором начинаются колебания от слишком большой его величины. Главное в этом процессе – вовремя убедиться в том, что поведение системы является адекватным (машина ведет себя на трассе хорошо). Подстройка контура регулирования Подстройку можно выполнить на основе правил, которые используются для ручной настройки. Эти правила получены из опыта, теоретического анализа и численных экспериментов. Они сводятся к следующему: “КУ” следует увеличить, если значения одного из коэффициентов КП,КИ,КД подходят к пороговому значению 99.9; увеличение “КП” увеличивает быстродействие и снижает запас устойчивости; с уменьшением “КИ” ошибка регулирования с течением времени уменьшается быстрее; уменьшение “ПР” уменьшает запас устойчивости; увеличение “КД” увеличивает запас устойчивости и быстродействие.