Практическое занятие №
реклама

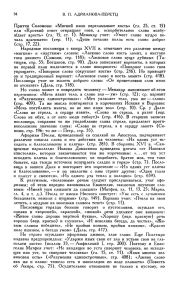
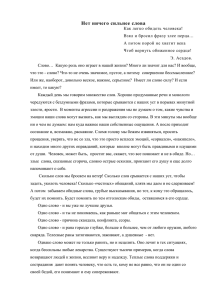
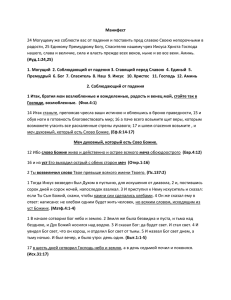
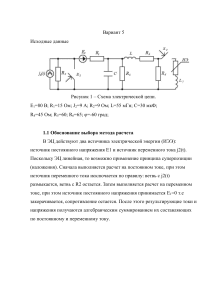
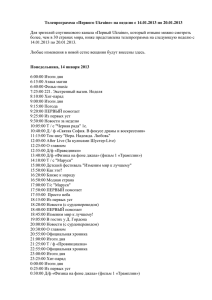
Расчёт электродинамических сил в электрических аппаратах 1. Основные теоретические сведения При протекании тока по проводнику, помещенному в магнитное поле, возникает электромагнитная сила, описываемая уравнением: f эм Bil sin , где (1) l - активная (помещенная в поле часть проводника); В - индукция, пронизывающая данный проводник; - угол между направлениями вектора электромагнитной индукции и тока. В i F Направление электромагнитной силы определяется правилом ”левой руки”: если силовые линии магнитного поля входят в ладонь, а четыре пальца указывают направление тока, отогнутый большой палец покажет направление силы. Для системы из нескольких проводников любой из них расположен в магнитном поле, создаваемом токами других проводников. Аналогичные явления возникают при взаимодействии проводника с ферромагнитной массой, а также в одном проводнике сложной формы. Магнитная индукция пропорциональна току, и при заданной конфигурации проводников и их взаимном расположении формула (1) записывается следующим образом: (2) f ЭМ ci 1 i 2 ; f ЭМ ci 2 . Значения коэффициента пропорциональности с (при силе в ньютонах и токе в амперах) зависят от геометрических размеров, конфигурации и взаимного расположения проводников. a d 1 d с 10 7 l a b 2l a2 a 1 2 a l l h h 2 a b ab bh l a l b с 107 h 0,25 0,5 1,0 2,0 5,0 0,2 0,36 0,43 0,5 0,55 0,58 0,5 0,43 0,46 0,5 0,53 0,55 0,8 0,46 0,48 0,51 0,52 0,53 1,0 0,47 0,49 0,51 0,52 0,53 1,4 0,48 0,5 0,51 0,52 0,53 b 2l kф , a где коэффициент формы является функцией отношений: ется по таблице аb b ; и определяbh h Сила разгибает угол: 90o h d=2r а 3 F l a r с 10 7 ln ln 2 2 h r 2 h2 h a h Сила притягивает проводник к ферромагнитной стенке: 4 l a с 10 7 l a При синусоидальном однофазном токе формула (2) принимает следующий вид: 1 cos 2t (3) f эм сi 2 сI m2 sin 2 t сI m2 сI д2 сI д2 cos 2t , 2 где I т 2 I д , откуда очевидно, что электромагнитная сила имеет две составляющих: постоянную и переменную (рис. 1). I Постоянная составляющая i I= m равна той, которая получа=Iд ется при том же значении постоянного тока, что и действующее значение пеt F ременного, а переменная m имеет такое же амплитудное fэ значение, но пульсирует с м двойной частотой. МаксиF мальное значение электро= t магнитной силы при переменном однофазном токе Рис. 1. Электродинамические силы получается в два раза боль- при однофазном переменном токе шим, чем при постоянном: Fm cI m2 2cI д2 2cI 2 (4) Наиболее тяжёлые явления возникают при коротких замыканиях. Ударный ток, возникающий примерно через половину периода (0,01 с) значительно – в 1,8 раз превышает амплитуду установившегося значения тока короткого замыкания, что приводит к возрастанию электродинамических сил по сравнению с коротким замыканием на постоянном токе в 6,5 раза. Поскольку сам установившийся ток короткого замыкания иногда в 20 …30 превышает номинальный, электродинамические силы возрастают в сотни и даже тысячи раз, что представляет большую опасность для электрических аппаратов. 1. Задание на расчёт и методические указания Определить величину и характер изменения во времени электродинамических усилий, действующих в системе проводников заданной конфигурации: а – в номинальном режиме работы; б – в режиме установившегося короткого замыкания; в - максимальную силу при действии ударного тока. Известны: напряжение источника питания Uи; собственное сопротивление короткого замыкания источника и проводников Z к rк jx к , сопротивление линии Z л rл jx л и сопротивление нагрузки Z н rн jx н . Короткое замыкание происходит: 1 – между точками б и в (на нагрузке); 2 – между точками а и в (на шинах источника). rк jx к а Рис. 2. Расчётная схема Uи rл jx л б rн jx н в 1. Находим токи: в номинальном режиме работы, в режимах установившегося короткого замыкания и ударные токи: I ном Uи rк rл rн I к .з . уст .1 I к .з . уст .2 2 xк x л xн Uи rк rл 2 Uи 2 rк x к 2 xк x л 2 ; ; 2 ; I к .з . уд .1 1,8 I к .з . уст .1 ; I к .з . уд .2 1,8 I к .з . уст .2 2. Выбираем по таблице нужную формулу расчёта и определяем коэффициент контура электродинамических усилий с 3. По формуле (3) определяем законы изменения мгновенных значений электродинамических сил в установившихся режимах работы (начальная фаза не учитывается): sin t сI сI sin t сI с 2 I f эм .ном с 2 I ном f эм .к .з . уст .1 2 2 2 2 к .з . уст .1 f эм .к .з . уст 2 с 2 I к .з . уст .2 4. 2 ном sin t сI 2 2 2 ном cos 2t ; 2 к .з . уст .1 сI к2.з . уст .1 cos 2t ; 2 к .з . уст .2 сI к2.з . уст .2 cos 2t Максимальные значения электродинамических сил: 2 2 Fтах .ном . 2сI ном ; Fтах .к .з . уст .1 2сI к .з . уст .1 ; Fтах .к .з . уст .2 2сI к2.з . уст .2 ; 5. Электродинамические силы при возникновении ударных токах короткого замыкания: F уд .1 6 ,5сI к2.з . уст .1 ; Fуд .2 6 ,5сI к2.з . уст .2 Литература 1. Коваленко П.В. : Учеб. пособие / Кавминводский ин-т (филиал) – Новочеркасск: ЮРГТУ, 2005. 2. Электрические и электронные аппараты: Учебник для вузов / Под ред. Ю.К. Розанова – М.: Энергоатомиздат, 1998 3. Родштейн Л.А. Электрические аппараты. – Л.: Энергоиздат, 1981 4. Соболев С.И. Расчёт и конструирование низковольтной электрической аппаратуры. - М.: Высшая школа, 1972 5. Таев И.С. Электрические аппараты управления. – М.: Высшая школа, 1969 6. Чунихин А.А. Электрические аппараты. – М.: Энергия, 1975