Основы теории управления - Информационная система
реклама

МИНИСТЕРСТВО РОССИЙСКОЙ ФЕДЕРАЦИИ ПО СВЯЗИ И
ИНФОРМАТИЗАЦИИ
Сибирский государственный университет телекоммуникаций и
информатики
Кафедра ПМиК
М.М РАЗДОБРЕЕВ
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Конспект лекций
Новосибирск
2006
1 Классификация систем
Теория автоматического управления – это наука об общих принципах
построения и расчета систем, выполняющих свои функции без
непосредственного участия человека.
Классификация производится по признакам.
1.1 Классификация по принципу управления
1.1.1 Принцип разомкнутого управления
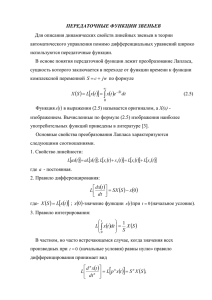
На рисунке 1.1 изображена функциональная схема системы.
БЗ
V
К1
К2
БУП
УМ
Z
U
ОУ
Y
Рисунок 1.1 - Функциональная схема системы
На рисунке 1.1 введены следующие обозначения:
ОУ – объект управления;
БЗ – блок задания;
БУП – блок усиления и преобразования;
УМ – усилитель мощности;
Y – выходная регулируемая координата ОУ;
V – входной сигнал;
U – управляющее воздействие.;
Z – возмущающее воздействие.
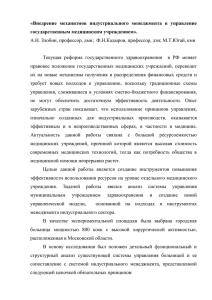
На рисунке 1.2 изображена упрощенная модель ОУ.
Z
U
KU
КВ
KZ
КУ
Y2
(-)
Y1
Y
ЗС
Рисунок 1.2 - Упрошенная модель ОУ
На рисунке 1.2 введены следующие обозначения:
КУ – канал управления, т.е. канал влияния U на Y;
КВ – канал возмущения, т.е. канал, через который Z изменяет Y от
заданного, предписанного значения;
ЗС – звено суммирования.
Модель описывается следующим уравнением:
Y = Y1 – Y2 = KUU – KZZ = K1K2KUV – KZZ,
(1.1)
где K1, K2, KU, KZ – передаточные коэффициенты.
При Z=0 можно записать предписанное значение выходной координаты
как:
Y = K1K2KUV.
(1.2)
Достоинство - простота системы.
Недостатком является низкая точность поддержания требуемого
значения Y.
1.1.2 Принцип управления по возмущению
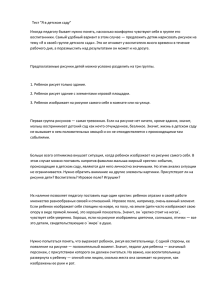
На рисунке 1.3 изображена функциональная схема системы .
БИП
Z1
БЗ
V
K1
БУП
K2
УМ
U
Z2 Z3
Z1
ОУ
Y
Рисунок 1.3 - Функциональная схема системы
На рисунке 1.3 введены следующие обозначения:
БИП – блок измерения и преобразования;
Z1 – основное возмущающее воздействие, которое можно измерить;
Z2, Z3 – возмущающие воздействия, которые не поддается измерению.
Пусть ОУ описывается уравнением:
Y = KUU – KZZ1,
(1.3)
Пусть требуется найти алгоритм управления, позволяющий исключить
влияние Z1 на Y.
На основе формулы 1.2 и 1.3 можно записать:
KUU – KZZ1 = K1K2KUV.
Тогда алгоритм управления можно записать в виде:
U = K1K2V + (KZ / KU)Z1.
(1.4)
Достоинство - возможность компенсации влияния на Y измеряемого
основного возмущающего сигнала;
Поскольку все возмущающие сигналы измерить невозможно, то
требуемое значение Y в системе поддерживается с низкой точностью.
1.1.3
системы
Принцип управления по отклонению с созданием замкнутой
На рисунке 1.4 изображена функциональная схема системы.
Z
БЗ
БУП
УМ
U
ОУ
Y
БИП
Рисунок 1.4 - Функциональная схема системы
Достоинство - высокая точность поддержания требуемого значения Y;
Однако появляются проблема устойчивости.
1.1.4
Комбинированный принцип
На рисунке 1.5 изображена функциональная схема системы.
БИП1
БЗ
V
БУП
УМ
Z1
U
Z2 Z3
Z1
ОУ
Y
БИП2
Рисунок 1.5 - Функциональная схема системы
1.2 Классификация по характеру изменения выходной координаты
1)
2)
3)
Системы автоматической стабилизации Y (V = const).
Системы программного управления (V изменяется программно).
Следящие системы (V изменяется случайно).
1.3 Классификация по степени участия человека в управлении
1)
2)
Системы автоматического управления (САУ).
Системы автоматизированного управления.
Системы автоматизированного управления включают следующие
компоненты:
1)
АСУП – автоматизированные системы управления производством
промышленных продуктов.
2) АСУЦ – автоматизированные системы управления цехом.
3) АСУТП
–
автоматизированные
системы
управления
технологическими процессами (управления группой оборудования).
2 Математическое описание систем
2.1 Стандартные входные воздействия
1)
Единичное ступенчатое воздействие.
приt 0;
приt 0.
1,
V
0,
(2.1)
График функции приведен на рисунке 2.1.
V
V = 1(t)
1
t
Рисунок 2.1 – График функции V=1(t)
Изображение Лапласа функции 1(t):
L{ 1(t) }
2)
1
p
(2.2)
Единичное импульсное воздействие.
(t )
d1(t )
dt
(2.3)
d1(t )
S (t )dt
dt 1(t ) 1
dt
(2.4)
Пусть δ1 = 100, тогда Δt = 0,01.
Формула (2.4) может использоваться при реализации функции δ(t), (см.
рисунок 2.2).
V
1
t
t
Рисунок 2.2 – График функции δ(t)
1
d1(t )
L{ (t)} l
p l{1(t )} p 1 .
p
dt
(2.5)
Гармонический сигнал.
3)
V = cos(ωt),
(2.6)
1
;
Tk
fk, Tk – частота и период колебаний соответственно.
где 2 f k 2
2.2
Линеаризация систем
Процесс преобразования нелинейного уравнения в линейное, называют
линеаризацией.
Пусть рассматриваемая система содержит нелинейный элемент,
имеющий статическую характеристику вида:
y f (x) .
(2.7)
В точке, соответствующей основному установившемуся рабочему
режиму системы, нелинейная характеристика может быть разложена в ряд
Тейлора:
y y0 f
|
x x x
0
x
x 2
x k
||
( x )|
fx
... f x
.
x x 0 2!
x x 0 k!
1!
(2.8)
Поскольку в системах автоматической стабилизации Δx мало, то в
правой части (2.7) можно ограничиться двумя слагаемыми.
y y0 f x|
k f x|
x x0
x x0
x y0 kx,
.
Поскольку:
y y0 kx,
y y0 y,
то окончательно можно записать уравнение:
y kx
(2.9)
Таким образом, при малых Δx в окрестности рабочей точки нелинейный
элемент заменяется линейным с передаточным коэффициентом k. Такую
линеаризацию называют линеаризацией методом касательных.
В дальнейшем будет рассматриваться уравнение:
y kx,
(2.10)
не забывая при этом о проведенной линеаризации.
2.3
Частотные характеристики
Передаточной функцией звена или системы называют отношение
изображения Лапласа выходного сигнала к входному сигналу при нулевых
начальных условиях.
Пусть найдена передаточная функция звена.
W ( p)
Y ( p)
.
V ( p)
(2.11)
На сновании (2.10) можно записать изображение выходного сигнала.
Y ( p) W ( p) V ( p)
Структурная схема звена приведена на рисунке 2.3.
(2.12)
V(p)
Y(p)
W(p)
Рисунок 2.3 – Структурная схема звена
При p j ( j 1)
функцию в виде:
можно
записать
частотную
передаточную
W ( j ) D( ) jM ( ) A( )e j ( ) ,
(2.13)
где D ( ) , M ( ) - действительная и мнимая части соответственно.
A( ) D 2 M 2
- амплитудочастотная функция;
M ( )
- фазочастотная функция.
D
(
)
График зависимости W ( j ) называют амплитудофазовой частотной
( ) arctg
характеристикой (АФЧХ).
Тогда схема звена приведена на рисунке 2.4.
Vm cos(t )
W ( j )
Ym cos(t ( ))
Рисунок 2.4 – Схема звена
Поскольку:
A( )
Ym
Vm
,
(2.14)
то можно сделать вывод, что A( ) - это передаточный коэффициент
звена, зависящий от частоты ω.
A( ) удобно строить в логарифмических координатах. За единицу
измерения принят 1 Белл – это единица измерения lg k s , где
коэффициент усиления мощности сигнала.
ks -
Ym2
Y
N 2 ( )
2
2
L( ) lg
N 2 Ym , N1 Vm lg 2 2 lg m 2 lg A( ), Белл
N1 ( )
Vm
Vm
L( ) 20 lg A( ), Белл
(2.15)
L( )
График
зависимости
называется
логарифмической
амплитудочастотной характеристикой (ЛЧХ).
График зависимости ( ) называется фазочастотной характеристикой
(ФЧХ).
Декадой (дек) называют интервал, на котором частота изменяется в
10 раз.
Структурная схема – это графический способ записи операторных
уравнений.
Операторное уравнение – это уравнение, записанное в изображении
переменных по Лапласу.
3 Элементарные типовые звенья систем управления
3.1 Пропорциональное безынерционное звено
1) Уравнение процессов в звене:
Y kV ,
(3.1)
где k – передаточный коэффициент звена, k=const.
2) Операторное уравнение:
Y ( p) kV ( p) .
(3.2)
Передаточная функция звена:
W ( p) k .
(3.3)
3) Переходная функция – это реакция звена на единичное
ступенчатое воздействие.
Переходная функция звена (см. рисунок 3.1) имеет вид:
y k 1(t )
y=k
y
V = 1(t)
1
t
Рисунок 3.1 - Переходная функция пропорционального безынертного звена
4) АФЧХ звена.
Частотная передаточная функция звена:
W ( j ) k D( ) jM ( ) A( )e j ( ) ,
где D k , M 0 , A k , 0 .
Амплитудно-фазовая
приведена на рисунке 3.2.
частотная
характеристика
(3.4)
(АФЧХ)
звена
Im
A( )
Re
k
Рисунок 3.2 - АФЧХ звена
5) Логарифмические частотные характеристики звена.
L( ) 20 log A( ) 20 log k ,
( ) 0 .
(3.5)
k 100 , тогда:
L( ) 40дБл .
Пусть
Логарифмические частотные характеристики звена приведены на
рисунке 3.3.
0 L( ), дБл
L( )
40
20
900
( )
-1
1
2
10
100
0
1
0,1
log
Рисунок 3.3 - Логарифмические частотные характеристики звена
3.2
Интегрирующее звено
1)
Уравнение процессов в звене:
t
y k Vdt.
(3.6)
0
2)
Операторное уравнение процессов звена:
y kV .
pY ( p) kV ( p).
(3.7)
Передаточная функция звена:
W ( p)
3)
k
.
p
(3.8)
Переходная функция звена.
t
t
0
0
t
y k 1(t )dt k dt k t kt.
0
Переходная характеристика звена приведена на рисунке 3.4.
(3.9)
y
y kt
k tg
t
Рисунок 3.4 – Переходная характеристика интегрирующего звена
4)
АФЧХ звена.
k ( j )
k
( ) j ,
j ( j )
D( ) 0,
k
M ( ) ,
k
A( ) ,
( ) 900.
W ( j )
(3.10)
На рисунке 3.5 приведена ФАЧХ звена.
Im
Re
900
A( )
Рисунок 3.5 – АФЧХ интегрирующего звена
5)
Логарифмические частотные характеристики звена.
L( ) 20 lg A( ) 20 lg
( ) 900 .
k
20 lg k 20 lg
(3.11)
(3.12)
Уравнение (3.11) является уравнением прямой линии с наклоном:
L L(2 ) L(1 ) 20 lg k 20 lg 101 20 lg k 20 lg 101
20 lg 10 20 lg 1 20 lg 1 20 lg 10,
дБл
.
дек
(3.13)
Пусть k=10 – координаты точки, через которую пройдет ЛАХ звена.
L( 1) 20 lg 10 20 lg 1 20, дБл.
На рисунке 3.6 приведена логарифмическая частотная характеристика
(ЛЧХ) интегрирующего звена.
0
L(),дБ
L ( )
900
20
-1
1
2
log
0
900
-20
( )
Рисунок 3.6 – ЛЧХ интегрирующего звена
3.3
Пропорциональное инерционное звено первого порядка.
1)
Уравнение процессов в звене:
Ty y kV ,
(3.14)
где Т – постоянная времени звена.
TpY ( p ) Y ( p ) kV ( p)
(Tp 1)Y ( p) kV ( p)
2)
Передаточная функция звена:
W ( p)
k
.
Tp 1
(3.15)
3)
Переходная функция звена.
На основе (3.15) можно записать изображение выходного сигнала:
Y ( p ) W ( p )V ( p )
k
k
V ( p)
Tp 1
(Tp 1) p
Разложение на
элементарные
дроби
A1
A
( A TA2 ) A2
2 1
Tp 1 p
(Tp 1) p
A2 k
A1 TA2 kT .
A1 TA2 0
k
kT
k
k
Y ( p)
p Tp 1 p p 1 .
T
Поскольку
L1(t )
1
1
UL e ( p )
, то переходная функция
p
p
звена имеет вид:
y k ke
t
T
t
T
k (1 e )
.
(3.16)
4) АФЧХ звена.
Частотная передаточная функция звена:
W (j )
( jT 1)
k
kT
2 2
j 2 2
jT 1 ( jT 1) T 1
T 1
k
D( ) jM ( ) A( )e j ( ) ;
k
D ( ) 2 2
;
T 1
kT
M ( ) () 2 2
;
T 1
k 2 (T 2 2 1)
k
A( ) D M
(T 2 2 1) 2
T 2 2 1
M ( )
( ) arctg
arctgT .
D( )
2
2
;
(3.17)
АФЧХ звена приведена на рисунке 3.7.
Im
Re
45
0
A(c )
Рисунок 3.7 – АФЧХ пропорционального интегрирующего звена первого порядка
Частота сопряжения звена:
(c )
1
.
T
(3.18)
5) Логарифмические частотные характеристики звена.
Логарифмическая амплитудочастотная функция звена может быть
заменена асимптотической характеристикой вида:
20 lg k ,
L( )
20 lg k 20 lg T ,
при
при
c ;
c .
(3.19)
Логарифмическая амплитудочастоная характеристика (ЛАХ) состоит из
двух линейных участков.
Расчет наклона характеристики на втором участке:
L L(2 101 ) L(1 ) 20 lg k 20 lg 10(T1 )
20 lg k 20 lg T1 20 20 lg T1 20 lg T1
20
дБл
.
дек
Пусть k=100; Т=0,1с;
L0 20 lg 100 40дБл;
c 10, c 1;
lg c 1.
ЛЧХ звена приведена на рисунке 3.8.
0 L( ), gБл
L( )
20
0
1
2
10
100
1
90
3
4
( )
log
0
Рисунок 3.8 – ЛЧХ пропорционального инерционного звена первого порядка
3.4
Дифференцирующее звено
1)
Уравнение процессов в звене:
y T
2)
dV
.
dt
(3.20)
Операторное уравнение звена:
Y ( p ) TpV ( p ) ;
Y ( p)
Tp ;
V ( p)
W ( p) Tp .
(3.21)
3)
Частотная передаточная функция звена может быть записана в
виде:
W ( j ) jT ;
D ( ) 0;
M ( ) T ;
A( ) T ;
( ) (90 0 ).
2
АФЧХ дифференцированного звена приведена на рисунке 3.9.
Im
A( )
Re
Рисунок 3.9 – АФЧХ дифференцирующего звена
4)
Логарифмические частотные характеристики звена:
L( ) 20 lg T 20 lg T 20 lg .
(3.22)
Пусть Т=0,1с, тогда (3.27) соответствует уравнению прямой линии с
наклоном:
L L(2 ) L(1 ) 20 lg 10(T1 ) 20 lg k 20 lg T1 20,
Первая точка имеет координаты:
T 1;
1
10c 1;
T
L( ) 0.
ЛЧХ дифференцированного звена приведена на рисунке 3.10.
дБл
.
дек
0
L( ), дБл
( )
20
-1
1
2
10
100
0
1
0,1
log
Рисунок 3.10 – ЛЧХ дифференцирующего звена
3.5
Форсирующее звено первого порядка
1)
Уравнение процессов в звене:
y kV kT
2)
dV
.
dt
(3.23)
Операторное уравнение звена:
Y ( p) k (Tp 1)V ( p) .
Y ( p)
K (Tp 1) .
V ( p)
Передаточная функция звена:
W ( p) k (Tp 1).
3)
Частотная передаточная функция звена:
При p j частотная передаточная функция звена имеет вид:
(3.24)
W ( j ) k jkT ;
D ( ) k ;
M ( ) kT ;
A( ) k T 2 2 1;
( ) arctgT ;
1
c .
T
(3.25)
4) Логарифмические частотные характеристики звена.
Логарифмические
характеристики звена:
асимптотические
амплитудочастотные
1
20
lg
k
,
при
,
T
L( ) 20 lg( A )
20 lg k 20 lg T ,
при c ,
( ) arctgT ,
дБл
L L(2 101 ) L(1 ) 20
.
дек
(3.26)
Пусть k=1;
Т=0,1с;
( )
4
(450 ) .
ЛЧХ форсирующего звена первого порядка приведена на рисунке 3.11.
0
L(),дБл
( )
20
-1
1
0
2
1
0,1
10
100
log
Рисунок 3.11 – ЛЧХ форсирующего звена первого порядка
3.6
Пропорциональное инерционное звено второго порядка
1)
Уравнение процессов в звене:
T 2 y 2dTy y kV.
2)
(3.27)
Операторное уравнение звена:
(T 2 p 2 2dp 1)Y ( p) kV ( p).
Передаточная функция звена имеет вид:
W ( p)
k
.
T p 2dTp 1
2
(3.28)
2
Структурная схема звена приведена на рисунке 3.12.
W ( p)
V ( p)
k
2 2
T p 2dTp 1
Y ( p)
Рисунок 3.12 – Структурная схема звена
Характеристическое уравнение звена имеет вид:
T 2 p 2 2dp 1 0.
(3.29)
Уравнение (3.29) имеет действительные корни при условии:
4d 2T 2 4T 2 4T 2 (d 2 1) 0,
(3.30)
т. е. при d 1.
При выполнении условия (3.30) рассматриваемой звено может быть
представлено двумя пропорциональными звеньями первого порядка:
W ( p)
k1
k2
k1k 2
.
T1 p 1 T2 p 1 T1T2 p 2 (T1 T2 ) p 1
(3.31)
Приравнивая правые части (3.285) и (3.31), можно записать следующие
уравнения:
k1k 2 k ;
T1T2 T 2 ;
T1 T2 2dT ;
k 2 1.
(3.32)
4 Построение и преобразование структурных схем
4.1 Последовательное соединение звеньев
Пусть дана структурная схема системы вида (см. рисунок 4.1).
X 2 ( p)
X 3 ( p)
V ( p)
W1 ( p )
W2 ( p )
W3 ( p )
X 1 ( p)
Y ( p)
Рисунок 4.1 – Структурная схема последовательно соединенных звеньев
Путем структурных преобразований
передаточную функцию схемы W ( p) .
требуется
найти
общую
На основе структурной схемы можно записать следующее уравнение:
Y ( p) X 1 ( p) W3 ( p) X 2 ( p),
X 2 ( p) W2 ( p) X 3 ( p),
X 3 ( p) W1 ( p)V ( p).
(4.1)
Исключая промежуточные переменные, окончательно можно записать
изображение выходного сигнала в виде:
Y ( p) W1 ( p)W2 ( p)W3 ( p)V ( p).
Поскольку W ( p)
Y ( p)
, то окончательно можно записать:
V ( p)
3
W ( p) Wk ( p).
(4.2)
k 1
Если последовательно соединены n элементов, то расчетная формула
имеет следующий вид:
n
W ( p) Wk ( p).
(4.3)
k 1
4.2 Параллельное соединение звеньев
Пусть на рисунке
соединенных звеньев.
4.2 приведена структурная схема трех параллельно
X 1 ( p)
W1 ( p)
W2 ( p )
V ( p)
W3 ( p )
X 2 ( p)
Y ( p)
X 3 ( p)
Рисунок 4.2 – Структурная схема параллельно соединенных звеньев
По структурной схеме можно записать изображение выходного сигнала
вида:
n
n
n
k 1
k 1
k 1
Y ( p) X k ( p) Wk ( p)V ( p) V ( p) Wk ( p).
Тогда передаточная функция определяется по формуле:
n
W ( p ) Wk ( p) .
(4.4)
k 1
4.3 Звено, охваченное обратной связью
Пусть на рисунке 4.3 приведена структурная схема звена, охваченного
обратной связью.
V ( p)
E ( p)
WПЦ ( p )
Y ( p)
( )
WОС ( p)
Рисунок 4.3 – Структурная схема замкнутой системы
На рисунке 4.3 приведены следующие обозначения:
WПЦ ( p ) - передаточная функция звеньев прямой цепи;
WОС ( p) - передаточная функция звеньев обратной связи;
E ( p) - изображение ошибки регулирования.
На основе рисунка можно сделать вывести уравнение:
Y ( p) WПЦ ( p) E ( p);
E ( p) V ( p) WОС ( p)Y ( p).
(4.5)
Исключая в системе уравнений (4.5) промежуточную переменную E ( p) ,
можно записать уравнение вида:
Y ( p) WПЦ ( p)V ( p) WПЦ ( p)WОС ( p)Y ( p),
где верхний знак соответствует «-» ОС, а нижний знак соответствует «+» ОС.
Y ( p)1 WПЦ ( p)WОС ( p) WПЦ ( p)V ( p ).
Таким образом, передаточная
рассчитывается по формуле:
функция
замкнутой
системы
Wз ( p)
WПЦ ( p)
,
1 WРС ( p)
(4.6)
где WРС ( p) - передаточная функция разомкнутой системы:
WРС ( p ) WПЦ ( p )WОС ( p ).
4.4 Перенос звена суммирования
Пусть на рисунке 4.4 приведена исходная структурная схема системы.
( ) Z ( p )
W1 ( p )
V ( p)
X 2 ( p)
X 1 ( p)
W2 ( p )
Y ( p)
ЗС
Рисунок 4.4 – Исходная структурная схема системы
На основе рисунка 4.4 можно записать следующие уравнения:
X1 ( p) W2 ( p)( X 2 ( p) Z ( p)),
X 2 ( p) W1 ( p)V ( p). ,
Тогда, исключая промежуточный цикл X 2 ( p) , окончательно можно
записать:
X1 ( p) W1 ( p)W2 ( p)V ( p) W2 ( p)Z ( p).
(4.7)
На рисунке 4.5 приведена схема переноса ЗС по ходу сигнала.
X 1 ( p)
V ( p)
W1 ( p )W2 ( p)
( ) Z ( p )
W2 ( p )
Рисунок 4.5 – Преобразованная структурная схема (перенос ЗС по ходу сигнала)
На рисунке 4.6 приведена схема переноса ЗС против хода сигнала.
1
W1( p)
( ) Z ( p )
W1 ( p ) W2 ( p)
V ( p)
X 1 ( p)
Рисунок 4.6 – Преобразованная структурная схема (перенос ЗС против хода
сигнала)
4.5 Перенос узла
Пусть на рисунке 4.7 приведена исходная структурная схема.
V ( p)
W1 ( p )
X 2 ( p)
W2 ( p )
X 1 ( p)
Рисунок 4.7 – Исходная структурная схема системы
Пусть сигнал X 2 изменить невозможно. Преобразованные структурные
схемы приведены на рисунках 4.8 и 4.9
X 1 ( p)
V ( p)
W1 ( p ) W2 ( p)
1
W2 ( p)
X 2 ( p)
Рисунок 4.8 – Преобразование структурной схемы (перенос узла) по ходу сигнала
W2 ( p )
X 2 ( p)
X 1 ( p)
;
X 2 ( p)
1
X 1 ( p).
W2 ( p)
Схема переноса узла против хода сигнала приведена на рисунке 4.9.
V ( p)
W1 ( p ) W2 ( p)
X 1 ( p)
W1 ( p )
X 2 ( p)
Рисунок 4.9 – Преобразование структурной схемы (перенос узла) против хода
сигнала
4.6
Передаточная функция системы
возмущающему воздействию
по
управляющему
и
Пусть требуется найти реакцию системы на несколько однозначно
действующих сигналов (см. рисунок 4.10).
( ) Z ( p )
V ( p)
W1 ( p)
W2 ( p )
W3 ( p)
Y ( p)
()
Рисунок 4.10 – Структурная схема системы
При исследовании линейных систем
справедлив принцип
суперпозиции: реакция системы на несколько одновременно действующих
сигналов равна сумме реакций системы на каждый сигнал в отдельности.
1) При Z ( p) =0 на основе рисунка 4.10 можно записать передаточную
функцию системы по управляющему воздействию:
W31 ( p)
W1 ( p)W2 ( p)W3 ( p)
WРС ( p)
,
1 W1 ( p)W2 ( p)W3 ( p) 1 WРС ( p)
(4.8)
где WРС ( p) W1 ( p)W2 ( p)W3 ( p).
Тогда на основе формулы (4.8) можно записать изображение выходного
сигнала в виде:
Y ( p) W31 ( p)V ( p )
W1 ( p)W2 ( p)W3 ( p )
V ( p).
1 W1 ( p)W2 ( p)W3 ( p )
(4.9)
2) При V(p)=0 можно построить структурную схему (см. рисунок 4.11):
( ) Z ( p )
Z ( p)
W3 ( p)
W2 ( p )
-1
Y ( p)
()
W1 ( p )
Рисунок 4.11 – Преобразования структурной схемы системы
На основе рисунка 4.11 можно записать переходную функции по
возмущающему воздействию:
W32 ( p) ()
W2 ( p)W3 ( p)
.
1 W1 ( p)W2 ( p)W3 ( p)
(4.10)
И изображение выходного сигнала:
Y ( p) W32 ( p) Z ( p) ()
W2 ( p)W3 ( p)
Z ( p).
1 W1 ( p)W2 ( p)W3 ( p)
(4.11)
Используя принцип суперпозиции на основе формул (4.9) и (4.11)
можно записать изображение выходного сигнала системы:
Y ( p)
W1 ( p)W2 ( p)W3 ( p)
W2 ( p)W3 ( p)
V ( p)
Z ( p). (4.12)
1 W1 ( p)W2 ( p)W3 ( p)
1 W1 ( p)W2 ( p)W3 ( p)
5 Расчет
системы
автоматической
заданного значения выходной координаты
5.1 Построение структурной схемы системы
стабилизации
Пусть даны уравнения процессов в исходной системе:
k
1
x2 2 ( x3 k3 x1 ) x2 ,
T
T
k1
1
x3 x4 x3 ,
T1
T1
k
1
x4 РБ e x4 ,
T0
T3
e V kОС x1 ,
x1 k 4 ( x2 Z ),
(5.1)
где y x1 - выходная регулируемая координата системы;
V – входной сигнал, являющийся заданным значением y;
Z – возмущающее воздействие;
x1 , x2 , x3 , x4 – координаты состояния системы;
kРБ , kОС – передаточный коэффициенты решающего
обратной связи системы;
k1 , k2 , k3 , k4 – передаточные коэффициенты;
T0 , T1 , T – постоянные времени, рассчитываемые в секундах.
блока
и
Первые два уравнения в (5.1) описывают объект управления. Третье
уравнение в (5.1) соответствует усилителю мощности. Четверное уравнение
описывает решающий блок. Пятое уравнение – уравнение замыкания
системы. В задании на контрольную работу, аналогично структуре таблицы
1.1, приведена полная таблица вариантов.
Таблица 1.1 – Параметры звеньев исходной системы
T1
k3
Номер k1
kРБ
k2
k4
T
варианта
1
2
3
4
…
25
0.4
2.5
1
0.09
kОС
Z0
x1c
На рисунках 5.1 и 5.2 приведены схема системы во временной форме
и детализированная схема исходной системы, построенные на основе
уравнений (5.1).
k3
Z
()
V
e
x4
kРБ
T0
()
x4
x3
k1
T1
()
x3
x2
k2
T
()
x2
x1
k4
x1 Y
()
1
T1
1
T0
()
1
T
kОС
Рисунок 5.1 – Схема системы во временной форме
k3
Z
()
V
e(p) k
РБ
T0
1
p
()
x4 ( p)
k1
T1
1
p
()
1
T0
I
()
x3( p)
()
II
1
T1
1 x2( p)
p
k2
T
x1(p)
ЗС
()
III
k4
p
1
T
kОС
Рисунок 5.2 – Структурная схема исходной системы
Поскольку для контура I можно записать;
1
p
W ( p)
1
1
T0 p
T1
T0 p 1 ,
то для участка I окончательно можно записать передаточную функцию:
W0 ( p )
k РБ
k РБT0
k
W ( p)
РБ .
T0
T0 (T0 p 1) T0 p 1
(5.2)
Y
Для участка II можно записать передаточную функцию:
W1 ( p)
1
e
k1
k
1 .
T1 1 1
Tp 1
T1 p
(5.3)
Аналогично, для участка III можно записать передаточную функцию:
W01 ( p )
1
p
k2
k
2 .
T 1 1 Tp 1
Tp
(5.4)
Для определения передаточной функции ОУ необходимо звено
суммирования (ЗС) перенести против входа сигнала. На рисунке
5.3
приведена преобразованная структурная схема системы.
Z ( p)
()
()
V
k РБ
T0 p 1
x4 ( p )
k1
T2 p 1
x3
Tp 1
k2
x3( p)
()
x2(p)
k2
Tp 1
x1(p)
Y ( p)
k4
p
()
kОС
Рисунок 5.3 – Преобразованная структурная схема ОУ
При Z(p)=0 передаточная функция
управляющему сигналу X3(p) имеет вид:
объекта
управления
по
1
k2 k4
k3
kk
(Tp 1) p
W01 ( p)
2 2 4
. (5.5)
k 2 k3 k 4
T
1
Tp
p
k
k
k
2
2 3 4
p
p 1
1
k 2 k3 k 4
k 2 k3 k 4
(Tp 1) p
На основе (5.5) можно записать характеристическое уравнение ОУ:
T
1
p2
p 1 0.
k 2 k3 k 4
k 2 k3 k 4
(5.6)
При исходных данных, приведенный в таблице 1.1 можно записать
следующее:
0.09 p 2 p 1 0.
(5.7)
Поскольку уравнение (5.7) имеет действительные корни, то ОУ может
быть представлен последовательным соединением двух пропорциональных
инерционных звеньев первого порядка (смотри рисунок 5.4).
X 3 ( p)
k0
T2 p 1
1
T3 p 1
X 1 ( p)
Рисунок 5.4 – Структурная схема ОУ по управляющему воздействию
Использую рисунок 5.4 можно записать следующую передаточную
функцию:
W01 ( p)
k0
.
(T2 p 1)(T3 p 1)
(5.8)
Использую рисунок 5.4 и формулу (5.8) можно записать следующую
систему уравнений:
T
T2T3
,
k 2 k3 k 4
1
T2 T3
.
k 2 k3 k 4
k0
1
,
k3
(5.9)
На основе (5.9) с учетом исходных данных таблицы 1.1 можно записать
следующее:
k0 0.4,
T2T3 0.9,
T2 T3 1.
(5.10)
Таким образом, окончательно ОУ имеет следующие корни:
k0 0.4,
T2T3 0.9c,
T2 T3 1c.
На основе рисунка 5.4 можно записать изменение выходного сигнала.
Y ( p)
k0
X 3 ( p ).
(T2 p 1)(T3 p 1)
(5.11)
При X 3 ( p) 0 на основе рисунков 5.3 и 5.4 можно записать
передаточную функцию ОУ по возмущающему действию.
Y ( p) (1)
(Tp 1)
k0
Z ( p)
k2 (T2 p 1)(T3 p 1)
1
(Tp 1)k Z
k 2 k3
(1)
Z ( p) (1)
Z ( p),
(T2 p 1)(T3 p 1)
(T2 p 1)(T3 p 1)
(Tp 1)
где
kZ
1
k 2 k3
-
передаточный
коэффициент
(5.12)
объекта
по
возмущающему воздействию.
kОБ
(Tp 1)k Z
k2
W02 ( p)
.
(T2 p 1)(T3 p 1)
(T2 p 1)(T3 p 1)
(Tp 1)
(5.13)
С учетом правила суперпозиции на основе 5.11 и 5.12 окончательно
можно записать:
Y ( p)
k0
k0
Tp 1
X 3 ( p)
Z ( p).
(T2 p 1)(T3 p 1)
k Z (T2 p 1)(T3 p 1)
Таким образом, можно окончательно построить структурную схему
исходной системы (рисунок 5.5).
ОУ
V ( p)
k РБ
T0 p 1
k1
T1 p 1
Z ( p)
(Tp 1)k 2
(T2 p 1)(T3 p 1)
k0
T2 p 1
1
T3 p 1
x1( p)
Y (p)
()
kОС
Рисунок 5.5 – Структурная схема исходной системы
5.2 Передаточная функция исходной системы по управляющему и
возмущающему воздействию
При Z ( p) 0 на основе рисунка 5.5 можно записать передаточную
функцию исходной системы по управляющему воздействию:
k РБ k1k 0
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1)
Wз1 ( p)
k РБ k1k 0 k ОС
1
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1)
где
k РБ k1k 0
,
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
(5.14)
k РС k РБ k1k0 kОС .
На основе (5.14) можно записать изображение выходного сигнала
исходной системы:
Y ( p)
k РБ k1k0
V ( p ).
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
(5.15)
При V(p)=0 передаточная функция
возмущающему воздействию имеет вид:
Wз ( p) (1)
исходной
системы
kZ
(T2 p 1)(T3 p 1)
1
k РС
1
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
(1)
по
(5.16)
(Tp 1)(T0 p 1)(T1 p 1)k Z
.
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
Изображение выходного сигнала полученного на основе (5.16) имеет
вид:
Y ( p) (1)
(Tp 1)(T0 p 1)(T1 p 1)k Z
Z ( p). (5.17)
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
С учетом принципа суперпозиции на основе формул (5.15) и (5.17)
можно записать изображение выходного сигнала:
Y ( p)
k РБ k1k0
V ( p)
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
(Tp 1)(T0 p 1)(T1 p 1)k Z
Z ( p).
(T0 p 1)(T1 p 1)(T2 p 1)(T3 p 1) k РС
(5.18)
5.3 Анализ устойчивости исходной системы по критерию Гурвица
Используя формулы (5.14) и (5.15) можно записать характеристическое
уравнение замкнутой системы:
a4 p 4 a3 p 3 a2 p 2 a1 p a0 0.
(5.19)
Используя исходные данные таблицы 1.1, на основе критерия Гурвица
можно сделать вывод об устойчивости системы. Поскольку рассмотренная
система является неустойчивой, то и выполняется следующее неравенство:
6 Статический
расчет
системы
автоматической
стабилизации заданного значения выходной координаты
Исходная система в разомкнутом состоянии:
k РС k РБ k1k 0 k ОС .
1) При этом k ОС 0 k РС 0 .
Используя теорему о предельном значении на основе (5.18) можно
записать в установившееся решение:
y y (t ) lim Y ( p)
p 0
k РБ k1k 0V k Z Z y
зад
РС
V ( p) LV 1(t )
Z ( p) Z 1(t )
yРС ,
(6.1)
зад
y РС
k РБ k1k 0V - заданное значение выходной координаты
где
разомкнутой системы;
yРС k Z Z - величина, на которую уменьшается выходная
координата разомкнутой системы при действии возмущения.
Пусть
зад
y РС
100,
k Z 1,
Z 0 20,
тогда
зад
зад
y0 yРС
k Z Z 0 yРС
yРС 80
зад
y y РС
kZ Z
y
100
(см. рисунок 6.1).
Z
80
Z
Z 0 20
Рисунок 6.1 – Статическая характеристика разомкнутой системы
В соответствии с заданием на проектирование, требуемая точность
стабилизации выходной координаты составляет величину x1 .
Поскольку выполняется условие:
c
0
y РС
x1c ,
(6.2)
то разомкнутая система должна быть заменена замкнутой системой
автоматической стабилизации заданного значения выходной координаты.
2) Исходная система в замкнутом состоянии.
На основе (5.18) можно записать уравнение статики замкнутой системы:
k РБ k1k 0
kZ
V
Z y зад y,
k РС 1
k РС 1
k kk
y зад РБ 1 0 ,
k РС 1
k Z
y Z .
k РС 1
y
где
(6.3)
В соответствии с заданием на проектирование можно записать
следующее:
y0 x1c , или
kZ
Z 0 x1c .
k РС 1
(6.4)
Используя знак равенства (6.4) окончательно можно записать расчетную
формулу требуемого значения передаточного коэффициента разомкнутой
системы:
k TРС
k Z Z0
1.
x1c
(6.5)
Поскольку k РС k РБ k1k 0 k ОС - выполняется, то расчет требуемого
значения передаточного коэффициента РБ проводится по следующей
формуле:
T
k
T
РБ
T
k TРС
.
k1k 0 k ОС
(6.6)