Лабораторная работа №2 - Российский государственный
advertisement

ФЕ Д Е РАЛ Ь Н ОЕ АГ Е Н Т СТВ О П О ОБ РАЗ О В АН И Ю
МОСКОВСКИЙ ГОСУДАРСТ ВЕННЫЙ ГОРНЫЙ УНИВЕРСИТЕТ
Кафедра
«Автоматики и управления в технических системах»
Певзнер Л.Д., Дмитриева В.В.
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
ПО ДИСЦИПЛИНЕ
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
для студентов направлений
550200, 651900 – «Автоматизация и управление»
Москва 2006
УДК ХХХ.ХХ
Певзнер Л.Д., Дмитриева В.В., Лабораторный практикум по
дисциплине «Теория автоматического управления». Учебное пособие для
студентов направления 550200. – М., МГГУ, 2006. – ХХ с.
Практикум
лабораторных
управления»,
лабораторных
работ
по
охватывающее
занятий
содержит
дисциплине
«Теория
решение
основных
описание
22
автоматического
типовых
задач
современной теории управления на ЭВМ или АВМ: составление
математических моделей систем, анализ и синтез стационарных линейных,
нелинейных и дискретных систем.
Практикум предназначен для студентов направления 550200, 651900
«Автоматизация и управление» специальности 210100 «Управление и
информатика в технических системах», а также студентов других
специальностей, изучающих дисциплины по автоматизации и управлению.
Рецензент: профессор Яризов А.Д., Российский университет нефти и
газа им. Губкина И.М.
Московский государственный
горный
2
университет,
2006.
Предисловие .............................................................................................. 4
Лабораторная работа №1 .......................................................................... 6
Лабораторная работа №2 .......................................................................... 9
Лабораторная работа №3 ........................................................................ 17
Лабораторная работа №4 ........................................................................ 21
Лабораторная работа №5 ........................................................................ 25
Лабораторная работа №6 ........................................................................ 28
Лабораторная работа №7 ........................................................................ 35
Лабораторная работа №8 ........................................................................ 42
Лабораторная работа №9 ........................................................................ 48
Лабораторная работа №10 ...................................................................... 54
Лабораторная работа №11 ...................................................................... 58
Лабораторная работа №12 ...................................................................... 62
Лабораторная работа №13 ...................................................................... 67
Лабораторная работа №14 ...................................................................... 70
Лабораторная работа №15 ...................................................................... 74
Лабораторная работа №16 ...................................................................... 79
Лабораторная работа №17 ...................................................................... 84
Лабораторная работа №18 ...................................................................... 90
Лабораторная работа №19 ...................................................................... 94
Лабораторная работа №20 .................................................................... 100
Лабораторная работа №21 .................................................................... 107
Лабораторная работа №22 .................................................................... 112
Список рекомендуемой литературы ................................................... 118
3
Предисловие
Данное учебное пособие содержит методическое обеспечение 22
лабораторных
работ
по
дисциплине
«Теория
автоматического
управления». Предназначено пособие студентам направлений 550200,
651900 – «Автоматизация и управление» и рассчитано на 2 учебных
семестра, 36 занятий. Избранные лабораторные работы (№№ 3, 4, 5, 6, 7,
16) могут быть использованы студентами других направлений и
специальностей АСУ, ИС, САПР, ТМ, ГЭ, ГМО, изучающих дисциплины
по автоматизации и автоматическому управлению в течение одного
семестра.
Описание каждой лабораторной работы содержит: цель работы,
краткую теоретическую справку, список рекомендуемой литературы,
схемы для моделирования, контрольные вопросы для самопроверки,
требования к оформлению отчета, варианты заданий.
Лабораторные работы выполняются на ЭВМ или АВМ студентами
по индивидуальному варианту, задаваемому преподавателем. Допуском к
лабораторному занятию является владение теоретическим материалом
работы, подготовленные расчеты и схемы. В конце занятия преподавателю
предъявляются результаты экспериментов, которые заносятся в отчет.
Отчет должен включать следующие разделы: название лабораторной
работы, цель, задание, согласно выданному варианту, содержательную
часть,
выводы.
Защита
лабораторной
работы
осуществляется
индивидуально каждым студентом на основе его отчета и задания
преподавателя.
4
Лабораторная работа №1
Математические модели линейных систем
Динамическая система характеризуется совокупностью:
вектором координат состояния x x1 , x2 xn ;
T
вектором входных (управляющих) воздействий u u1 , u2 um ;
T
вектором выходных переменных y y1 , y2 yk .
T
Величины {xi} - образуют минимальную совокупность координат,
задание которых полностью определяет текущее состояние системы.
Состояние
системы
может
быть
отождествлено
с
положением
изображающей точки в n - мерном пространстве, которое носит название
пространства состояния.
Линейная
динамическая
система
описывается
линейными
уравнениями состояния и выхода
x Ax Bu, x (0),
y Cx,
где
(1.1)
A – матрица состояния размерности n x n;
B – матрица управления размерности n x m;
C – матрица выхода размерности k x n.
x1, x2, . . . x n
u1
u2
(n) :
A, В, С.
um
y1
y2
yk
Рис. 1.1. Многомерная динамическая система.
рис. 1
Уравнения (1.1) являются матричной моделью линейной системы.
6
Для построения структурной модели линейной системы используют
нагруженный ориентированный граф, содержащий:
вершины, которым соответствуют переменные;
дуги,
нагруженные
операторами
преобразований,
например
передаточной функцией, постоянным коэффициентом, оператором
интегрирования.
При этом вершина, в которой сходятся дуги, является точкой
суммирования.
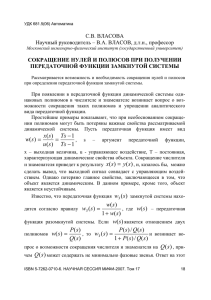
Пример: Система второго порядка (2): A, B, C, имеющая скалярные
вход и выход, задается матрицами
a12
a
b1
A 11
, B , C c1 c2 ,
a21 a22
b2
уравнения состояния и выхода (1.1) для этой системы принимают вид:
x1 a11 x1 a12 x2 b1u
x2 a21 x1 a22 x2 b2 u
y c1 x1 c2 x2 .
Эквивалентная структурная модель системы изображена на рис. 1.2.
Gain2
a12
b2
Gain7
U
1
b1
s
Integrator1
Gain
X1
1
a21
s
Integrator
Gain3
Sum
X2
c2
Y
Gain6
Sum1
Gain5
Gain1
Sum2
a22
a11
c1
Gain4
Рис. 1.2.Структурная модель системы для моделирования в приложении Simulink.
При замене вектора состояния x другим вектором, z, связанным со
старым линейным невырожденным преобразованием
7
z P x,
где P – матрица преобразования, размерности n x n,
матричная модель системы изменяется и принимает вид:
~
~
z Az Bu, z (0)
~
y Cz.
(1.2)
где матрицы преобразованной модели
~
~
~
A PAP 1 , B PB , C CP 1.
(1.3)
При этом пространство состояния X заменяется пространством
состояния Z той же размерности. Введение новых координат состояния
приводит
к
эквивалентному
преобразованию
структурной
модели.
Выходной сигнал системы при переходе от одних координат состояния к
другим при одинаковых управляющих воздействиях остается неизменным.
Цель работы
Изучение
методов
структурного
моделирования
линейных
динамических систем.
Литература
1. [5] стр. 24–34;
2. [1] стр. 119–124
3. [4] стр. 30-68
Порядок выполнения лабораторной работы
1.
Составить
структурную
схему
модели,
соответствующую
варианту задания.
2.
При помощи матрицы перехода перейти к новым координатам
состояния и составить новую структурную схему системы.
8
3.
Собрать две структурные схемы моделей на компьютере,
используя блоки Subsystem приложения Simulink ППП MatLab. Подать
одновременно на вход обоих подсистем единичное ступенчатое
воздействие,
используя
блок
Step,
и
сравнить
результаты
моделирования.
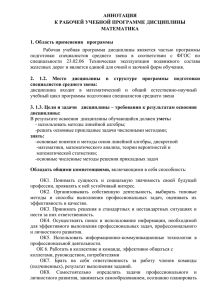
4.
Схема моделирования в приложении Simulink представлена на
рис.1.3.
U
Y1
Subsystem
Mux
Step
Mux
U
Scope
Y2
Subsystem1
Рис.1.3. Схема для выполнения лабораторной работы в приложении Simulink.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования в лабораторной работе принять не
более 3 секунд; шаг моделирования 0,01с.
Работа считается законченной, если – отклонение сигнала выхода
преобразованной модели ~y ( t ) от сигнала выхода исходной модели y(t) за
время 1с не превышает 0,7. Отклонение определить по формуле
1
y(t ) ~y (t ) 2 dt .
(1.4)
0
Содержательная часть отчета должна включать в себя: систему
уравнений,
описывающих
исходную
систему,
систему
уравнений
преобразованной модели, две подробные структурные схемы, график
выходных сигналов, график сигнала ошибки.
9
Контрольные вопросы
1. Какими способами можно описать динамическую систему?
2. Как выполнить переход от одного способа описания к другому?
3. Что понимается под мультипликативной и аддитивной моделями? Какие
еще модели вы знаете?
4. Что такое внешняя и внутренняя модели системы?
5. Как перейти от внешней модели к внутренней, и наоборот?
6. Каковы определения управляемости и наблюдаемости системы?
7. Что такое невырожденное преобразование?
8. Изменится ли передаточная функция системы с заменой координат
состояния?
9. Как построить структурную схему по матрицам модели?
10. Что понимают под структурным представлением Коши?
Варианты заданий
№
варианта
1.
2.
3.
Матрицы системы
А
В
3 2 2
0
1
2
0 8 9
6
0
5
0 0 1
0
3
0
6 3 7
0
5
5
1 4 9
0
9
6
0 5 2
3
1
0
С
2
0
2
10
Р
4 0
6 2 4
1
0
0
5 2 1
2 5
6 4 2
4
1
5
3 0 5
0 2
2 4 4
3
0
4
0
1 2
4.
5.
6.
7.
8.
9.
10.
11.
12.
2 1 0
1
2
0
3 6 5
1
0
3
9 1 5
0
6
0
8
0
4
5
5
5
0
1 0
0 2 1
4 1 4
1
5
0
8
1
2
3 9 5
0
0 1
0
4
1
2 5 3
0 1 0
7 6 8
6
1
0
4 1 0
1 4 0
5 5 2
0
5
0
1 8 1
0 5 0
4 9 6
1
1
5
1 3 2
0 4 0
3 6 4
0
2
6
7 1 6
0
2
0
3
5
2
0
1
2
3 5
0 2 2
3
0
5
4 3 2
0 0
5 5 0
5
1
2
3
0
1
2 1
1 3 0
6 0 1
5 2 1
0
1
0
1
0
3
0
0
2
11
0 3
4 3 5
0 4 0
2 4 3
2 1
1 3
0
1 1
0
2 2 5
4 1
2 3
2
1 5 2
4 6 0
0 5
2 4
5
0 4 4
4 4 1
1 4
1 2 3
0 3 5
1 4
0
0 5
4 5 5
2
2
3
0
4
0
Лабораторная работа №2
Преобразование математических моделей
систем автоматического управления
Систему автоматического управления можно представить как
комбинацию типовых динамических звеньев. Изображение системы
управления в виде совокупности динамических звеньев с указанием связей
между ними называют структурной схемой. Структурная схема может
быть получена из уравнений, описывающих систему, и наоборот,
уравнения можно получить из структурной схемы.
Элементами структурных схем являются:
звено, описываемое передаточной функцией :
узел, ветвление:
сумматор:
Для
w
;
;
.
последовательного
соединения
звеньев
результирующая
передаточная функция равна произведению передаточных функций
входящих в нее элементов
n
W ( p) Wi ( p) ;
(2.1)
i 1
для параллельного соединения звеньев результирующая передаточная
функция равна сумме передаточных функций
n
W ( p ) Wi ( p ) ;
(2.2)
i 1
для системы с обратной связью
W ( p)
W ( p)
,
1 W ( p)Wоб ( p)
9
(2.3)
где W(p) – передаточная функция прямого тракта; Wоб(p) – передаточная
функция канала обратной связи.
Для реальных систем структурные схемы сложны и содержат
перекрестные связи и контура. В этом случае схему необходимо упростить
и свести к простейшему виду, используя правила преобразования
структурных схем.
Кроме
структурных
математических
зависимостей
схем
для
в
системах
наглядного
управления
изображения
используют
направленные графы.
Цель работы
Изучение правил и методов преобразований структурных схем для
получения аналитического выражения результирующей передаточной
функции.
Литература
1. [1] стр. 113–119;
2. [2] стр. 107–111, 120–123, 137–143;
3. [6] стр. 3–10.
Порядок выполнения работы
1. Используя блок Transfer Fcn, собрать исходную схему системы
управления согласно заданию.
2. Применив правила преобразования структурных схем, получить
передаточную функцию системы.
3. Используя блок Step, подать единичное ступенчатое воздействие на
вход систем:
а) заданной исходной структурной схемой;
б) заданной результирующей передаточной функцией W ( p) .
10
4. Объединить выходы обеих систем, используя блок Mux
и блок
Scope, предназначенный для наблюдения временных зависимостей.
Убедиться в идентичности реакций данных систем.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования в лабораторной работе принять не
более 1с., так как система может быть неустойчива; шаг моделирования
0,01с.
Содержательная часть отчета должна содержать: структурную схему
исходной системы, передаточную функцию преобразованной модели,
график выходных сигналов.
Контрольные вопросы
1. Как будет выглядеть заданная система, изображенная при помощи
графов?
2. Как осуществить перенос узла и точки суммирования
а) со входа на выход сумматора;
б) с выхода на вход сумматора?
3. Как осуществить перенос узла ветвления и точки суммирования
а) с входа на выход звена;
б) с выхода на вход звена?
4. Как, используя структурную схему, получить дифференциальные
уравнения, описывающие систему?
5. Как, используя дифференциальные уравнения системы, изобразить
структурную схему?
6. Каким
образом
доказать
справедливость
выражения
для
передаточной функции замкнутой системы?
7. Какие элементы включает в себя направленный граф? Чему они
соответствуют в структурной схеме?
11
8. В
каком
порядке
следует
осуществлять
преобразование
структурных схем?
9. Как доказать справедливость утверждения, что
а) передаточная функция последовательного соединения
звеньев есть произведение передаточных функций
звеньев;
б) передаточная функция параллельного соединения звеньев
есть сумма передаточных функций звеньев?
10. Каково условие эквивалентного преобразования структурных
схем?
Варианты задания
Вариант 1
W6
W7
u
W1
W2
W3
W4
W5
W9
W8
4
0,05
3
; W2 ( p)
; W3 ( p)
; W4 ( p) 0,25;
p
p
0,21 p 1
2
0,5
W5 ( p)
; W6 ( p)
;
2 2
(0,15) p 2 0,55 0,15 p 1
0,38 p 1
W1 ( p)
W7 ( p)
6
; W8 ( p) 1,2; W9 ( p) 0,35.
0,12 p 1
12
y
Вариант 2
W7
W6
u
W1
W2
W3
W4
W5
y
W8
W9
0,008
3,2
0,008
; W2 ( p)
; W3 ( p)
; W4 ( p) 2,5;
p
1,4 p 1
p
0,54
6
W5 ( p) 2 2
;W6 ( p)
;
3 p 2 0,25 3 p 1
0,75 p 1
W1 ( p)
W7 ( p)
0,15
; W8 ( p) 0,35; W9 ( p) 2,5.
p
Вариант 3
W6
u
W1
W2
W3
W4
W9
W7
W5
y
W8
60
0,2
0,5
; W2 ( p)
; W3 ( p) 1,9; W4 ( p)
;
p
p
1,5 p 1
6
1,2
W5 ( p)
;
W
(
p
)
;
6
(0,3) 2 p 2 2 0,3 0,6 p 1
(0,7) 2 p 2 2 0,7 0,3 p 1
W1 ( p)
W7 ( p) 0,35; W8 ( p) 2,5; W9 ( p)
13
0,25
.
0,06 p 1
Вариант 4
W6
u
W1
W2
W3
W4
W5
y
W7
W8
W9
0,015
1,9
15
; W2 ( p)
; W3 ( p) 0,54; W4 ( p) ;
p
0,67 p 1
p
1,2
2,5
W5 ( p)
; W6 ( p) 0,35; W7 ( p)
;
2 2
(4) p 2 4 0,4 p 1
1,8 p 1
0,23
7,8
W8 ( p)
; W9 ( p)
.
1,2 p 1
4,5 p 1
W1 ( p)
Вариант 5
W6
W9
u
W1
W2
W3
W4
W5
y
W7
W8
4,5
13
0,18
; W2 ( p) 0,7; W3 ( p) ; W4 ( p)
;
p
p
p 1
3
0,2
W5 ( p)
; W6 ( p)
;
2 2
(0,07) p 2 0,07 0,25 p 1
1,5 p 1
1,9
W7 ( p)
; W8 ( p) 0,5; W9 ( p) 6,1.
2 2
(0,05) p 2 0,05 1 p 1
W1 ( p)
14
Вариант 6
W7
W9
u
W1
W2
W3
W4
W5
y
W6
W8
0,08
2,5
0,04
; W3 ( p)
; W4 ( p)
;
p
31 p 1
p
8
0,25
W5 ( p)
;
W
(
p
)
;
6
(4) 2 p 2 2 0,8 4 p 1
p
4,8
W7 ( p)
; W8 ( p) 0,18; W9 ( p) 3,2.
(0,8) 2 p 2 2 0,8 0,35 p 1
W1 ( p) 1,2; W2 ( p)
Вариант 7
W7
W6
u
W1
W2
W9
W3
W4
W5
y
W8
0,45
0,23
7
; W2 ( p) 2,5; W3 ( p)
; W4 ( p)
;
p
1,2 p 1
8,65 p 1
0,75
2,5
W5 ( p)
; W6 ( p)
;
2 2
(0,6) p 2 0,6 0,38 p 1
p
3,5
0,27
W7 ( p) 0,2; W8 ( p)
; W9 ( p)
.
0,35 p 1
8,1 p 1
W1 ( p)
15
Вариант 8
W6
u
W1
W2
W7
W3
W4
W5
y
W8
W9
0,35
0,2
7
; W2 ( p)
; W3 ( p)
; W4 ( p) 0,73;
p
0,34 p 1
2,5 p 1
4
0,1
W5 ( p)
; W6 ( p)
;
2 2
(0,5) p 2 0,5 0,35 p 1
1,5 p 1
3,2
2
W7 ( p)
; W8 ( p) 0,27; W9 ( p)
.
0,1 p 1
0,07 p 1
W1 ( p)
Вариант 9
W6
u
W1
W2
W3
W4
W9
W7
W5
W8
0,09
7,5
4
; W2 ( p)
; W3 ( p) 0,75; W4 ( p)
;
p
18 p 1
4 p 1
0,2
3,2
W5 ( p)
; W6 ( p)
;
2 2
(1,2) p 2 0,25 1,2 p 1
0,7 p 1
0,05
2
W7 ( p)
; W8 ( p)
; W9 ( p) 0,54.
p
0,5 p 1
W1 ( p)
16
y
Вариант 10
W6
u
W1
W2
W7
W3
W4
W5
W8
W9
0,06
0,2
0,06
; W2 ( p) 5; W3 ( p)
; W4 ( p)
;
p
2,5 p 1
p
0,2
2
W5 ( p)
; W6 ( p)
;
2 2
(0,6) p 2 0,6 0,7 p 1
6 p 1
6
1,5
W7 ( p) 0,5; W8 ( p)
; W9 ( p)
.
1,7 p 1
1,8 p 1
W1 ( p)
17
y
Лабораторная работа №3
Временные характеристики динамических систем
Динамические свойства системы могут быть определены по
переходной функции и импульсной функции данной системы.
Переходная функция, или переходная характеристика системы h(t)
представляет собой кривую переходного процесса или реакции системы на
единичное скачкообразное воздействие u(t)=1(t) .
Изображение по Лапласу входного сигнала
U( p )
1
p
(3.1)
и, следовательно, изображение выходного сигнала
Y( p )
1
W( p ).
p
(3.2)
Переходя от изображения к оригиналу, получаем
h( t )
L
1 W (
p )
.
p
(3.3)
Импульсная характеристика k(t) представляет собой реакцию
системы на единичную импульсную дельта-функцию (t). Изображение по
Лапласу дельта-функции
L t 1 ,
(3.4)
поэтому изображение выходного сигнала совпадает с передаточной
функцией системы
Y( p ) W( p ) .
17
(3.5)
Переходя от изображения импульсной характеристики к оригиналу,
получаем
k (t ) L W ( p ) ,
1
-
импульсная
характеристика
системы
(3.6)
совпадает
с
оригиналом
передаточной функции системы.
Импульсная характеристика является основной характеристикой
системы. Это обусловливается тем, что для произвольного входного
воздействия u(t), прикладываемого в момент времени t=0, переходный
процесс при нулевых начальных условиях определяется по импульсной
характеристике системы
t
t
y( t ) u( ) k ( t ) d k ( ) u( t ) d .
0
(3.7)
0
Цель работы
Изучение временных характеристик типовых звеньев. Исследование
временных характеристик при изменении параметров этих звеньев.
Литература
1. [1] стр. 56–58;
2. [2] стр. 43–47, 65–88.
Порядок выполнения работы
1. Используя программные средства моделирующего пакета Simulink,
собрать структурную схему инерционного звена, введя координату
состояния по каноническому правилу Коши: x1 y . Установить
параметры этого звена равными k1, T1 заданного варианта.
2. Собрать схему инерционного
звена, заданного
передаточной
функцией W ( p) с такими же параметрами k1, T1, используя блок
Transfer Fcn.
18
3. Объединить входы двух схем. Используя блок Step, подать
единичный ступенчатый сигнал на объединенный вход. Объединить
выходы обеих систем, используя блок Mux
и блок Scope,
предназначенный для наблюдения временных зависимостей. Схема
моделирования в приложении Simulink представлена на рис.3.1.
1(t)
h1(t)
U
Y1
Mux
Step
Subsystem
Mux
Scope
h2(t)
K1
T1.s+1
Transfer Fcn
Рис.3.1. Схема для выполнения лабораторной работы в приложении Simulink.
4. Наблюдать переходный процесс на выходе обеих схем. Сравнить
переходные характеристики двух схем.
5. Изменить параметры второй схемы, положив согласно варианту
а) k = k2, T = T1,
б) k = k1, T = T2.
6. Сравнить переходные характеристики схем для двух вариантов.
Зарисовать результаты сравнения переходных характеристик.
7. Собрать
структурную
координаты
x1 y,
состояния
схему
по
колебательного
каноническому
звена,
правилу
вводя
Коши:
x2 x1 . Установить параметры этого звена равными k, T1, 1
заданного варианта.
8. Собрать схему колебательного звена, заданного передаточной
функцией W ( p) с такими же параметрами k, T1, 1.
19
9. Объединить входы и выходы двух полученных схем. Подать
единичный ступенчатый сигнал 1(t) на объединенный вход.
Наблюдать
переходный
процесс.
Сравнить
переходные
характеристики двух схем.
10.Изменить параметры второй схемы, положив согласно варианту:
а) T = T1, = 2,
б) T = T2, = 1.
11.Сравнить переходные характеристики схем для двух вариантов.
Зарисовать в отчет переходные характеристики колебательных
звеньев с различными параметрами.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 4max(T1, T2) с; шаг 0,01с.
Содержательная часть отчета должна включать в себя: структурные
схемы инерционного и колебательного звеньев, графики переходных
типовых
звеньев
с
различными
параметрами.
На
переходных
характеристиках необходимо подписать значение изменяемого параметра.
Контрольные вопросы
1. Каковы дифференциальные уравнения, описывающие типовые
динамические звенья?
2. Каким образом связаны дифференциальные уравнения звеньев с их
передаточными
функциями?
Привести
пример
перехода
от
дифференциального уравнения к передаточной функции.
3. Как по графику переходной функции инерционного звена оценить
величину постоянной времени T?
4. За какой интервал времени переходный процесс инерционного
звена можно считать законченным с точностью до 5%?
5. Как выглядит переходный процесс на выходе колебательного звена
при значении параметра затухания
20
а) 0;
б) 0,2;
в) 0,5;
г) 0,8?
6. Как выглядит переходная характеристика двух последовательно
соединенных звеньев:
а) интегрирующего и инерционного; б) двух инерционных?
7. Как получить передаточную функцию системы, зная ее переходную
или импульсную характеристики?
8. Как связаны между собой переходная и импульсная функция?
9. Каковы импульсная и переходная функции звена запаздывания?
10. Как связано расположение полюсов системы с переходными
процессами?
Варианты заданий
Инерционное звено
№
Колебательное звено
в/в
1
2
k1
T1
k2
T2
k
T1
1
T2
2
1,5
2
0,15
0,2
7
7
0,7
0,75
2
3
0,1
0,1
0,1
0,25
0,6
0,7
0,6
0,8
3
2,5
0,25
8
0,75
4
0,2
0,09
0,7
0,75
4
3
0,3
7
0,8
2
0,2
0,2
0,8
0,9
5
4
0,35
8,5
0,85
3
0,3
0,05
0,8
0,6
6
0,5
0,1
6
0,95
4
0,3
0,3
0,9
0,9
7
2
0,2
8,5
0,7
2
0,1
0,35
0,6
0,95
8
3
0,25
6
0,8
3
0,2
0,15
0,8
0,6
9
3,5
0,3
7,5
0,85
4
0,25
0,2
0,8
0,7
10
4
0,15
9
0,6
5
0,3
0,1
0,9
0,75
21
Лабораторная работа №4
Частотные характеристики динамических систем
Частотные характеристики системы определяются как реакция
системы на гармоническое воздействие.
Рассмотрим динамическую систему представленную на рис. 4.1, на
вход которой подается гармонический сигнал
x(t ) Aвх sin t ,
(4.1)
где Aвх – амплитуда, – угловая частота этого воздействия.
x(t)
y(t)
W(p)
Рис. 4.1. Динамическая
система.
рис. 1
На выходе линейной системы в установившемся режиме будет
наблюдаться гармонический сигнал той же частоты , обладающий другой
амплитудой и сдвинутый по фазе на угол относительно входного сигнала
y (t ) Aвых sin ( t ).
(4.2)
Для линейной системы установившаяся реакция на гармоническое
входное воздействие определяется выражением
Aвых e j ( t ) W ( j ) Aвх e jt .
(4.3)
Функция W(j) называется частотной характеристикой системы.
Эта характеристика представляет собой комплекснозначную функцию
частоты
W ( j ) A( ) e j ( ) ,
21
(4.4)
модуль которой называется амплитудной частотной характеристикой
(АЧХ) и определяется как отношение выходной амплитуды к входной
mod W ( j )
Aвых ( )
A( ) ,
Aвх ( )
(4.5)
а аргумент, или фазовая частотная характеристика (ФЧХ), равен сдвигу
фаз выходного сигнала по отношению к входному
argW ( j ) ( ) .
(4.6)
Частотная характеристика изображается на комплексной плоскости в
виде годографа Найквиста – геометрического места концов векторов
W ( j ) при изменении частоты от 0 до .
Вместо частотной характеристики системы строят отдельно АЧХ,
показывающую как изменяет система амплитуду выходного сигнала
различной частоты, и ФЧХ, показывающую фазовые сдвиги, вносимые
системой в выходной сигнал на различных частотах.
Цель работы
Изучение
теоретических
и
практических
методов
получения
частотных характеристик линейных стационарных систем.
Литература
1. [1] стр. 61–69;
2. [2] стр. 47–54, 65–88;
3. [5] стр. 34-40;
4. [4] стр. 134-152.
Порядок выполнения работы
1. Используя блок Transfer Fcn, задать передаточную функцию
инерционного звена с параметрами, соответствующими номеру
варианта предыдущей работы.
22
2. Выбрать не менее шести значений частот i входного сигнала для
достаточно полного построения частотной характеристики. Заполнить
значениями полученных частот строку i табл. 4.1.
3. Подавая на вход системы гармонический сигнал, задаваемый при
помощи блока Sine Wave, с амплитудой Aвх , равной единице, и
изменяя его частоту i, экспериментально снять АЧХ и ФЧХ
инерционного звена. Схема моделирования в приложении Simulink
представлена на рис.4.2.
Asinwt
K1
Y(t)
T1.s+1
Sine Wave
Transfer Fcn
Mux
U(t)
Scope
Mux
Рис.4.2. Схема для выполнения лабораторной работы в приложении Simulink.
Необходимо объединить выходы обеих систем, используя блок
Mux и блок Scope, предназначенный для наблюдения временных
зависимостей, как показано на рисунке 4.2. Полученные значения
занести в строки A(i) и(i) таблицу 4.1:
Таблица 4.1.
i
A(i)
(i)
В приложении Simulink частотные характеристики определяются
следующим образом. Время моделирования принимают 5B, где B –
период задающего генератора. При помощи лупы, изменяющей
масштаб графиков по оси ОХ, расположенной на панели приборов
блока Scope, необходимо выделить последний период задающего
23
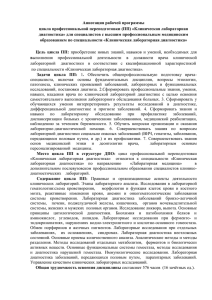
сигнала. По графикам входного и выходного сигналов (рис. 4.3)
определяют значения A() и (), считая, что переходные процессы в
системе заканчиваются к моменту времени 3B.
Рис. 4.3. Определение величины амплитуды и фазового сдвига выходного
сигнала.
Фазовый сдвиг определяется как расстояние между точками ,
пересечения нулевого уровня входным и выходным сигналами после
момента 3B. Расстояние следует измерять в масштабе клеток. Для
определения масштаба необходимо измерить половину периода
входного сигнала. Для графиков на рис. 4.2 половина периода B/2=3
кл, расстояние ( – ) = 1 клетке,
1 ,
3 180 ,
искомый фазовый сдвиг составляет –60.
По
полученным
данным
построить
АЧХ,
ФЧХ
и
годограф
инерционного звена.
5. Собрать систему, состоящую из последовательного соединения двух
инерционных звеньев или инерционного и интегрирующего звеньев.
Снять частотные характеристики соединения. Полученные значения
24
занести в таблицу, аналогичную табл. 4.1. Построить годограф, АЧХ и
ФЧХ системы.
6. Собрать систему, состоящую из последовательного соединения двух
типовых звеньев. Снять и построить частотные характеристики.
Содержательная часть отчета по каждой части лабораторной работы
должна
включать
в
себя
снятые
экспериментально
частотные
характеристики звеньев и построенные вручную АЧХ, ФЧХ и АФЧХ.
Контрольные вопросы
1. Как определяется частотная характеристика системы?
2. Как,
используя
передаточную
функцию
системы,
получить
частотную характеристику системы?
3. Как аналитически рассчитать значения амплитудной частотной и
фазовой частотной характеристик системы?
4. Как выглядят частотные характеристики типовых звеньев?
5. Как изменяет вид АЧХ каждый из параметров инерционного звена?
6. Как строятся логарифмические частотные характеристики?
7. Как
получить
передаточную
функцию
последовательного
соединения звеньев?
8. Как определить модуль и аргумент частотной характеристики
последовательного соединения звеньев?
9. Как
строятся
логарифмические
частотные
характеристики
соединения типовых звеньев?
10. Как строятся годографы соединений типовых звеньев?
Варианты задания
Варианты задания первой части работы совпадают с вариантами к
работе №3. Варианты задания для третьей части работы приведены в
таблице.
25
№
варианта
Передаточная функция W ( p ) соединения типовых
звеньев.
1.
5 p 1
0,2 p 1
2.
0,5 p 1
2 p 1
3.
3p
0.2 p 1
4.
2,5 p
(0,2 p 1)(0,85 p 1)
5.
5 p 1
(0.2 p 1)( p 1)
6.
5p
(0,2) 2 p 2 0,2 0.6 p 1
7.
2,5
(0,6) p 2 0,5 0.6 p 1
2
8.
5
p(0.5 p 1)
9.
5 p 1
0.2 p
10.
2,5
((0,6) p 2 0,5 0.6 p 1) p
2
26
Лабораторная работа №5
Исследование устойчивости замкнутой
линейной системы управления
Одним из основных требований к любой системе автоматического
управления является устойчивость происходящих в ней процессов.
Различают:
асимптотическую
устойчивость,
устойчивость
и
неустойчивость движений системы.
В линейной системе все процессы либо устойчивы, либо
неустойчивы, поэтому можно говорить об устойчивости самой системы.
Для асимптотической устойчивости линейной системы необходимо и
достаточно, чтобы все корни ее характеристического многочлена
A(p) a0 p n a1 p n 1 an 1 p an
лежали слева от мнимой оси комплексной плоскости полюсов.
Мнимая ось в комплексной плоскости представляет собой границу
устойчивости. Левая комплексная полуплоскость вместе с мнимой осью
является областью устойчивости. Наличие хотя бы одного
характеристического корня в правой полуплоскости делает систему
неустойчивой.
Правила, позволяющие выносить суждение об устойчивости
линейной системы, называют критериями устойчивости. Используют
алгебраические критерии – Рауса и Гурвица, которые позволяют судить об
устойчивости по коэффициентам характеристического уравнения;
частотные критерии Найквиста и Михайлова, позволяющие судить об
устойчивости по частотным характеристикам системы. Степень близости
системы к неустойчивости можно оценить по величине запасов
устойчивости системы.
Цель работы
Исследование влияния параметров системы на ее динамические
свойства и устойчивость.
Литература
1. [1] стр. 133–165;
2. [4] стр. 155-176;
3. [5] стр. 40-48;
25
4. [2] стр. 158–172.
Порядок выполнения работы
1. Собрать схему замкнутой системы, разомкнутая часть которой состоит
из трех последовательно соединенных инерционных звеньев с
постоянными времени T1, T2, T3, соответствующими заданному
варианту. Систему замкнуть единичной отрицательной обратной
связью. Объединить вход и выход системы, используя блок Mux и
блок
Scope,
предназначенный
для
наблюдения
временных
зависимостей. Схема для моделирования в приложении Simulink
приведена на рис.5.1.
K
Step
Sum
Gain1
1
1
1
T1.s+1
T2.s+1
T3.s+1
Transfer Fcn1
Transfer Fcn
Transfer Fcn2
Mux
Mux1
Scope
Рис.5.1. Схема для выполнения лабораторной работы в приложении Simulink.
2. Для замкнутой системы рассчитать, используя критерий Гурвица,
предельный коэффициент усиления Kпред, при котором система будет
нейтрально устойчива.
3. Используя блок Step, подать на вход системы единичный ступенчатый
сигнал 1(t) и наблюдать переходный процесс при:
а) k1 = Kпред;
б) k2 = 0,5Kпред;
в) k3 = 1,3Kпред.
Графики переходных процессов зарисовать в отчет.
26
4. Для значений k2 = 0,5Kпред и k3 = 1,3Kпред снять АФЧХ разомкнутой
системы, занося данные в таблицу и построить годографы АФЧХ, по
которым оценить устойчивость замкнутой системы.
Таблица 5.1.
i
4
2
2
3
2
3
A2 ( )
A3 ( )
( )
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования в лабораторной работе принять равным 7с;
шаг моделирования 0,01с.
Содержательная часть отчета должна включать в себя: расчет
предельного коэффициента усиления по критерию Гурвица, переходные
процессы
для
трех
значений
коэффициента
усиления,
снятые
экспериментально частотные характеристики разомкнутой системы для
двух значений коэффициента усиления, построенные вручную по
полученным данным на одном графике АФЧХ системы.
Контрольные вопросы
1. В
чем
заключается
основное
различие
аналитического
и
приближенных методов оценки устойчивости системы?
2. Как формулируются критерии Найквиста и Михайлова?
3. Как
выглядит
годограф
системы,
разомкнутая
представлена последовательным соединением:
27
часть
которой
а) интегрирующего и двух инерционных звеньев;
б) трех инерционных звеньев;
в) инерционного звена и звена постоянного запаздывания,
если система находится в нейтрально устойчивом состоянии?
4. Как убедиться, что последовательное соединение инерционного и двух
интегрирующих звеньев является структурно неустойчивым?
5. Как
найти
предельный
автоматического
коэффициент
управления
используя
усиления
критерии
системы
Найквиста
и
Михайлова?
6. Что такое асимптотическая устойчивость движения системы?
7. Как определить устойчивость системы по логарифмическим частотным
характеристикам?
8. Как формулируется критерий Найквиста, если разомкнутая часть
системы неустойчива?
9. Как выглядит годограф Михайлова в случае нейтрально устойчивой
системы?
10. Как определить запас устойчивости системы по ее АФЧХ, ЛАЧХ?
Варианты заданий
№
1
2
3
4
5
6
7
8
Т1
0,15
0,20
0,19
0,17
0,16
0,15
0,15
0,50
Т2
0,35
0,23
0,25
0,30
0,35
0,40
0,38
0,50
Т3
0,50
0,56
0,52
0,49
0,45
0,42
0,45
0,50
варианта
28
Лабораторная работа №6
Исследование качества замкнутой системы
автоматического управления в переходном режиме
Комплекс
требований
к
поведению системы
автоматического
управления в переходном и установившемся режимах, выраженный в
количественных показателях, называют качеством системы управления.
Задача анализа динамических процессов – определить, какое влияние
оказывают структура системы и значения ее параметров на процесс
управления и показатели его качества.
Прямые показатели качества процесса управления следующие:
установившееся рассогласованиеуст(t), определяющее точность
системы;
время регулирования tрег, которое служит основной характеристикой
быстродействия системы
t р ег :
( t ) уст ( t ) , t t р ег ,
(6.1)
где - заданная точность;
максимальное перерегулирование %, которое характеризует
плавность протекания переходных процессов. Оно определяется как
максимальный
выброс
управляемого
процесса
ymax max y( t )
t 0
относительно установившегося значения yуст(t)
%
ymax y уст ( t )
y уст ( t )
100%, t 0 ;
(6.2)
число перерегулирований или колебательность M, определяемое как
число выбросов управляемого процесса за время регулирования tрег;
время первого достижения t1: y(t1 ) y уст (t ) .
28
Для того чтобы непосредственно оценить качество процесса
управления,
необходимо
экспериментально.
В
его
построить
большинстве
случаев
аналитически
это
сложно,
или
поэтому
целесообразно использовать косвенные методы, позволяющие определить
вид переходной характеристики косвенно, без ее построения.
Это можно сделать частотными методами – исследуя амплитудночастотную характеристику, либо вещественную частотную характеристику
замкнутой
системы;
корневыми
методами
–
определяя
качество
переходного процесса по расположению нулей и полюсов передаточной
функции замкнутой системы; интегральными методами, когда процесс
характеризуется
значением
какого–либо
функционала
от
ошибки
регулирования.
Цель работы
Определение прямых и косвенных показателей качества управления.
Изучение влияния параметров САУ на качество переходных процессов.
Литература
1. [1] стр. 202–215;
2. [2] стр. 196–220, 231–257;
4. [4] стр. 179-205;
3. [5] стр. 48–54.
Порядок выполнения работы
1. Собрать схему системы, передаточная функция разомкнутой части
которой
представляет
собой
последовательное
соединение
интегрирующего и инерционного звена с постоянной времени T и
коэффициентом усиления K согласно заданному варианту. Систему
замкнуть единичной отрицательной обратной связью. Объединить
вход и выход системы, используя блок Mux
29
и блок Scope,
предназначенный для наблюдения временных зависимостей. Схема
для моделирования в приложении Simulink приведена на рис.6.1.
K
Step
Sum
Gain1
1
1
Mux
T1.s+1
s
Integrator
Mux1
Transfer Fcn1
Scope
Рис.6.1. Схема для выполнения лабораторной работы в приложении Simulink.
2. Задавая значения коэффициента усиления K равными k1 и k2,
соответственно, получить переходные характеристики h1(t) и h2(t).
Зарисовать их в отчет и определить по ним прямые показатели
качества: tрег, %, M, tm.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования в лабораторной работе принять не
равным 7с; шаг моделирования 0,01с.
3. Подать на вход системы гармонический сигнал с амплитудой, равной
единице, и, задавая различные значения частоты i, приведенные в
таблице 6.1, снять две амплитудные частотные характеристики
системы при значении коэффициента усиления системы K, равном k1
и k2. Значения АЧХ занести в таблицу. В данной части лабораторной
работе при каждом опыте изменять время моделирования таким
образом, чтобы АЧХ определять в установившемся режиме, то есть
не ранее пятого-шестого периода задающего генератора; шаг
моделирования принять 0,01с.
Таблица 6.1.
i
1
2
3
4
A1 ( )
A2 ( )
30
6
8
12
16
Построить по полученным данным на одном графике две АЧХ
системы при различных значениях ее коэффициента усиления.
Определить по полученным частотным характеристикам косвенные
показатели качества.
4. Построить спектры полюсов замкнутой системы при значениях
коэффициента усиления k1 и k2. Используя корневые методы,
вынести суждение о качестве переходных процессов в системе
управления.
Содержательная часть отчета должна включать в себя: два
переходных
процесса,
полученных
при
различных
коэффициентах
усиления, для каждого из которых определены все прямые показатели
качества;
снятые
экспериментально
и
построенные
вручную
амплитудочастотные характеристики системы при двух различных
значениях коэффициента усиления, по которым должны быть определены
косвенные показатели качества; спектры полюсов замкнутой системы,
полученные при двух различных значениях коэффициентах усиления, по
которым должны быть определены корневые показатели качества.
Контрольные вопросы
1. Как по графику переходного процесса определить длительность и
плавность переходного процесса?
2. Как
определить
по
АЧХ
системы
колебательность
и
время
регулирования?
3. Как
по
вещественной
частотной
характеристике
определить
перерегулирование и время регулирования?
4. Как по вещественной частотной характеристике можно судить о
монотонности переходного процесса?
5. Как выглядит вещественная частотная характеристика для системы,
находящейся на границе устойчивости?
31
6. Как
по
расположению
корней
характеристического
уравнения
определить показатели качества системы?
7. Как связана точность отработки различных типов сигналов с порядком
астатизма системы?
8. Что такое коэффициенты ошибок системы и как они связаны с
порядком астатизма системы?
9. Из каких составляющих складывается реальное движение системы?
10. Каков наилучший переходный процесс в смысле J0 и J1?
Варианты заданий
№
1
2
3
4
5
6
7
8
9
10
k1
2
3
5
3
9
4
9
6
5
18
k2
9
20
33
28
41
32
36
25
17
40
Т
0.2
0.5
0.4
0.7
0.5
0,8
0, 9
0,3
0,2
1
варианта
32
Лабораторная работа №7
Синтез линейных автоматических систем
с последовательной коррекцией
Процедура синтеза системы автоматического управления для
обеспечения заданного качества управления заключается в выборе
структуры и параметров регулятора, при которых выполняются заданные
требования к системе в отношении ее точности в переходном и
установившемся режимах.
Задача синтеза линейных непрерывных систем автоматического
управления методом последовательной коррекции заключается в подборе
дополнительного
корректирующего
устройства,
последовательно
соединенного с неизменяемым объектом управления. Включение такого
устройства в замкнутую систему и позволяет обеспечить требуемые
показатели качества.
На рис. 7.1 изображена замкнутая система управления объектом с
последовательным корректирующим устройством Wк(p; , , ...), структуру
и параметры которого надлежит определить.
u(t)
y(t)
Wк(p;,,... )
Wисх(p)
Рис. 7.1.Замкнутая система управления
рис. 1с корректирующим звеном.
где
u(t) – управляющее воздействие;
y(t) – регулируемая величина;
Wисх(p) – передаточная функция разомкнутой системы;
Wк(p; , , ...) – передаточная функция регулирующего устройства.
35
Передаточная функция разомкнутой скорректированной системы
определяется в виде произведения передаточной функции исходной
системы и корректирующего звена
Wж ( p) Wк ( p) Wисх ( p) ,
(7.1)
поэтому выбор последовательного корректирующего звена удобно
производить методом ЛАЧХ. Желательная частотная характеристика
разомкнутой системы имеет вид:
Wж ( j ) Wк ( j ) Wисх ( j ) .
(7.2)
Переходя к ЛАЧХ, можно записать:
Lж ( ) Lк ( ) Lисх ( ) .
(7.3)
Откуда можно определить ЛАЧХ корректирующего звена
Lк ( ) Lж ( ) Lисх ( ) .
(7.4)
Таким образом, если построить ЛАЧХ исходной системы и
желаемую ЛАЧХ, то вычитанием ординат Lисх() из ординат Lж() можно
определить ЛАЧХ корректирующего звена, а затем по виду этой ЛАЧХ
определить передаточную функцию корректирующего устройства Wк ( p ) .
Процедура синтеза содержит следующие этапы:
1. Построение ЛАЧХ исходной системы Lисх() с учетом коэффициента
усиления, который определяется требованиями к точности системы в
установившемся режиме.
2. Построение желаемой ЛАЧХ скорректированной системы Lж() в
соответствии с заданными показателями качества переходного процесса.
3. Определение ЛАЧХ корректирующего звена.
4. Определение по виду Lк() передаточной функции Wк(p; , , ...)
и параметров корректирующего звена.
36
Цель работы
Изучение
метода
корректирующим
синтеза
САУ
устройством
с
последовательным
методом
логарифмических
амплитудочастотных характеристик.
Литература
1. [1] стр. 352–357;
2. [2] стр. 279–294;
3. [5] стр. 72–80.
Порядок выполнения работы
1. Найти коэффициент усиления K исходной системы, используя значение
коэффициента скоростной ошибки c1.
2. Используя алгебраический критерий устойчивости Гурвица, определить,
является ли исходная замкнутая система устойчивой.
3. Построить ЛАЧХ исходной системы Lисх() по ее передаточной функции,
согласно заданному варианту.
4. Построить на том же графике ЛАЧХ желаемой системы, исходя из
требований к показателям качества , tрег, при этом:
определить частоту среза c :
c
( )
t рег
,
(7.5)
используя табличное соотношение между % и коэффициентом :
%
10
20
30
40
( )
0,914
1,643
2,646
4,286
37
определить границы 1к и 2к среднечастотной области, в которой
характеристика Lж() имеет наклон –20 дБ/дек и проходит через
точку с на оси частот, расположенной на уровне 0 дБ.
Границы среднечастотного участка находятся согласно формулам:
к2 (2 4) c ,
1к
2c
,
2
(7.6)
провести сопряжение среднечастотной части с низкочастотной до
частоты прямой, наклона –40 дБ/дек;
провести сопряжение среднечастотной области характеристики с
высокочастотной областью прямой наклона
–40 дБ/дек до
частоты ;
на частотах ниже и выше значения Lж() совпадают с
Lисх().
5. Вычитая
из ординат
Lж()
ординаты
Lисх(),
получить
Lк()
корректирующего звена. Для упрощения структуры корректирующего
звена можно варьировать участками сопряжения.
6. По виду ЛАЧХ корректирующего звена Lк() определить его
передаточную функцию Wк(p).
7. Собрать схему скорректированной системы.
K
Step
Sum
Gain
In1
Out1
KOP. YC-BO
In1
Out1
ICX
Scope
Рис.7.2. Схема для выполнения лабораторной работы в приложении Simulink.
38
В качестве управляющего воздействия, используя блок Step, подать
на вход единичную ступенчатую функцию 1(t). Для моделирования
выбрать метод симуляции с фиксированным шагом, время моделирования
в лабораторной работе принять немного более заданного времени
регулирования желаемой системы; шаг моделирования 0,01 с. Получить
переходную характеристику скорректированной системы, определить по
ней реальные показатели качества , tрег.
Вычислить дополнительный показатель качества – колебательность
M. Сравнить реальные показатели качества с заданными. Если реальные
показатели качества более чем на 10% превышают заданные, считать что
синтезированная система не удовлетворяет заданию. В этом случае
надлежит повторно выполнить синтез.
Содержательная часть отчета должна включать в себя: описание
процедуры частотного синтеза, применительно к заданному варианту;
построенные на логарифмической миллиметровой бумаге ЛАЧХ исходной
системы,
желаемой
передаточную
системы
функцию
и
корректирующего
корректирующего
устройства;
устройства;
схему
моделирования; полученный для скорректированной системы переходной
процесс; определенные по переходному процессу показатели прямые
качества.
Контрольные вопросы
1. В чем заключаются постановка и решение задачи синтеза?
2. В каких случаях применяется последовательная коррекция?
3. Чем удобен метод синтеза по ЛАЧХ и ЛФЧХ?
4. Каковы этапы процедуры синтеза последовательного корректирующего
устройства?
5. Какова передаточная функция скорректированной системы?
6. Какие известны показатели качества переходного процесса?
39
7. Как определяются запасы устойчивости системы?
8. Чем определяется порядок астатизма системы?
9. Как влияет порядок астатизма системы на ее способность отрабатывать
различные типы управляющих сигналов?
10.Как косвенно оценить показатели качества переходного процесса?
Варианты заданий
Передаточную
Wисх ( p)
функцию
K
.
p(T1 p 1)(T2 p 1)
системы найти как K
исходной
системы
Wисх ( p )
Коэффициент
передачи
прямого
принять
тракта
1
, где c1 -коэффициент скоростной ошибки.
c1
Числовые параметры для выполнения лабораторной работы приведены в
таблице.
T1
T2
c1
%
t рег , с
1.
0,12
0,15
0,004
25
0,75
2.
0,01
0,12
0,04
35
0,85
3.
0,012
0,14
0,005
40
0,9
4.
0,02
0,14
0,0057
35
0,9
5.
0,01
0,15
0,006
25
0,9
6.
0,017
0,15
0,005
35
0,95
7.
0,014
0,05
0,01
40
0,7
8.
0,012
0,14
0,004
40
1,1
9.
0,018
0,16
0,004
35
0,95
10.
0,025
0,09
0,0025
40
0,6
№
варианта
40
11.
0,019
0,16
0,006
40
0,95
12.
0,012
0,14
0,015
30
1,2
13.
0,025
0,14
0,0057
35
0,9
14.
0,035
0,125
0,0175
35
1,5
15.
0,019
0,16
0,01
30
1,2
16.
0,035
0,15
0,008
35
1,2
17.
0,015
0,2
0,004
35
0,8
18.
0,01
0,15
0,006
30
0,9
19.
0,12
0,065
0,005
25
0,4
20.
0,015
0,15
0,009
35
0,95
21.
0,011
0,14
0,0033
25
0,9
22.
0,13
0,01
0,0065
25
0,95
23.
0,14
0,012
0,0055
40
0,95
24.
0,008
0,1
0,0035
40
0,85
25.
0,1
0,011
0,005
35
1,0
26.
0,5
0,14
0,0035
20
0,85
27.
0,008
0,9
0,0055
20
1,0
28.
0,012
0,14
0,005
40
0,9
29.
0,018
0,17
0,0025
30
0,8
30.
0,018
0,16
0,004
35
0,95
31.
0,009
0,15
0,003
25
0,95
41
Лабораторная работа №8
Синтез системы автоматического управления с
использованием типовых регуляторов
Синтез систем автоматического управления с заданным качеством
управления можно осуществить, используя идею компенсации больших
постоянных времени объекта с помощью последовательно включенных
типовых регуляторов. Соответствующая настройка этих регуляторов
обеспечивает системе необходимый астатизм, коэффициент передачи,
быстродействие. Используют:
пропорциональный (П) регулятор
WП ( p ) kп ;
(8.1)
интегральный (И) регулятор
WИ ( p)
1
;
Tи p
(8.2)
пропорционально–интегральный (ПИ) регулятор
WПИ ( p) kп kи
1 Tиз p 1
;
p
Tи
(8.3)
пропорционально–дифференциальный (ПД) регулятор
WПД ( p) kп (1 Tд p) ;
(8.4)
пропорционально–интегрально–дифференциальный (ПИД)
регулятор
WПИД ( p) kп kи
Основным
условием
воспроизведения
входного
1
(1 Tиз p)(1 Tд p)
.
kд p
p
Tи p
настройки
сигнала.
42
регулятора
Этого
является
добиваются,
(8.5)
условие
подбирая
постоянные
времени
и
коэффициент
усиления
регулятора
по
определенным алгоритмам. После замыкания системы ее передаточная
функция, представляющая собой произведение передаточных функций
объекта и регулятора, должна принимать один из типовых видов:
Wз ( p)
a2
a0 p a1 p a2
2
(8.6)
а ее параметры должны удовлетворять равенству a12 2a2 a0 ; в этом случае
говорят, что система настроена по критерию модульного оптимума (МО).
Wз ( p)
a2 p a3
,
a0 p a1 p 2 a2 p a3
3
(8.7)
а ее параметры должны удовлетворять равенствам a12 2a2 a0 , a22 2a1a3 ; в
этом случае говорят, что система настроена по критерию симметричного
оптимума (SO).
Цель работы
Изучение методов выбора и настройки типовых регуляторов для
синтеза замкнутой линейной САУ.
Литература
1. [5] стр. 72–80;
2. [6] стр. 11–20.
Порядок выполнения работы
1. Для заданного объекта управления исследовать возможность и
качество статического управления, применяя П– или ПД–регуляторы,
подбирая соответствующим образом настройки. Если такое управление
невозможно, то, сделав обоснованный вывод об этом, перейти к оценке
возможности астатического управления.
43
2. Оценить возможность включения в систему И–, ПИ–, ПИД–
регуляторов. Если такая возможность существует, применить каждый
из них в замкнутой системе, настраивая соответствующим образом
параметры регуляторов.
3. Собрать схему одноконтурной системы управления, прямой тракт
которой содержит последовательное соединение объекта управления и
регулятора с единичной отрицательной обратной связью. Схема
моделирования приведена на рис. 8.1.
In1
PID
Step
Sum
PID Controller
Out1
OBJEKT
Scope
Рис.8.1. Схема для выполнения лабораторной работы в приложении Simulink.
Для задания передаточной функции объекта использовать блоки
Transfer fnc, а для задания регуляторов блок PID-controller. В блоке
PID-controller задаются коэффициенты закона управления kд , kп , kи ,
переход
к
которым
от
настроечных
параметров
kд k п
kи
1
kи
регулятора
осуществляется по формулам
Т из
kд k п
kи
; Тд
; Ти
(8.8)
4. Используя блок Step, получить переходные процессы для систем
управления с использованием всех возможных регуляторов. Для
моделирования выбрать метод симуляции с фиксированным шагом,
время моделирования для каждого опыта подобрать самостоятельно
таким образом, чтобы полностью видеть типовой переходной процесс;
шаг моделирования 0,01 с.
44
5. Для
каждой
синтезированной
системы
качественно
оценить
переходный и установившийся режимы, определив в первом случае tрег,
tд, %, M, и во втором случае оценить характер и значение
установившихся ошибок при воспроизведении замкнутой системой
типовых входных воздействий.
Содержательная часть отчета должна включать: настройку для
заданного
варианта
не
менее
трех
типовых
регуляторов;
схему
моделирования; полученные переходные процессы, для которых должны
быть определены показатели качества.
Контрольные вопросы
1. Каким образом преобразуется объект управления, состоящий из
последовательного соединения инерционных звеньев, для настройки
а) И–регулятора;
б) ПД–регулятора;
в) ПИД–регулятора?
2. Каково основное условие настройки регулятора?
3. Как связан порядок астатизма системы с коэффициентами ошибок
системы?
4. Как связан порядок астатизма системы с видом безошибочно
отрабатываемого сигнала?
5. В каких случаях применяют
а) ПД–регулятор;
б) ПИД–регулятор?
6. Что такое статическая система? Каковы для нее коэффициенты
ошибок?
7. Почему для системы, настроенной по SO-критерию, недопустима
точная компенсация максимальной постоянной времени?
8. Что такое типовые переходные процессы?
45
9. Каким образом можно устранить большое перерегулирование в
системе, настроенной по SO-критерию?
10. Каковы достоинства и недостатки астатичных регуляторов?
Варианты заданий
№ варианта
Передаточная функция объекта управления Woy ( p)
1.
100
(2 p 1)(0.75 p 1)(0.5 p 1)(0.05 p 1)(0.01 p 1)
2.
120
(2.5 p 1)( p 1)(0.35 p 1)(0.5 p 1)(0.1 p 1)
3.
150
( p 1)(0.5 p 1)(0.5 p 1)(0.05 p 1)(0.05 p 1)
4.
200
(3.75 p 1)(0.5 p 1)(0.25 p 1)(0.05 p 1)(0.01 p 1)
5.
150
(4.5 p 1)( p 1)(0.5 p 1)(0.02 p 1)(0.01 p 1)
6.
250
(5 p 1)(5 p 1)(0.5 p 1)(0.25 p 1)(0.1 p 1)
7.
300
(2 p 1)(0.75 p 1)(0.75 p 1)(0.01 p 1)
8.
100
(2 p 1)(0.75 p 1)(0.5 p 1)(0.05 p 1) p
9.
120
(2.5 p 1)( p 1)(0.35 p 1)(0.5 p 1) p
10.
150
( p 1)(0.5 p 1)(0.5 p 1)(0.05 p 1) p
46
11.
200
(3.75 p 1)(0.5 p 1)(0.25 p 1)(0.05 p 1) p
12.
150
(4.5 p 1)( p 1)(0.5 p 1)(0.02 p 1)(0.01 p 1) p
13.
150
(4.5 p 1)( p 1)(0.5 p 1)(0.02 p 1) p
14.
250
(5 p 1)(5 p 1)(0.5 p 1)(0.25 p 1) p
15.
250
(5 p 1)(0.5 p 1)(0.25 p 1)(0.1 p 1) p
16.
250
(5 p 1)(0.5 p 1)(0.5 p 1)(0.25 p 1)(0.1 p 1) p
17.
250
(15 p 1)(5 p 1)(0.5 p 1)(0.25 p 1) p
18.
100
(2 p 1)(2 p 1)(0.1 p 1)(0.05 p 1)
19.
125
(3.5 p 1)(0.8 p 1)(0.1 p 1)(0.05 p 1)
20.
225
(2 p 1)(1.2 p 1)(0.2 p 1)(0.1 p 1)
47
Лабораторная работа №9
Синтез автоматической системы с заданным
качеством процесса управления
Задана линейная вполне управляемая система автоматического
управления
x (t ) Ax (t ) Bu (t ), x (0)
( n ) :
y(t ) C x (t ).
(9.1)
Задача синтеза замкнутой системы решается в классе линейных
управлений
u(t ) uЌ (t ) K x(t ) ,
(9.2)
где uз(t) - входной сигнал задания; K – матрица коэффициентов обратной
связи.
Движение
замкнутой
по
состоянию
системы
описывается
линейным дифференциальным уравнением
x( t ) A x( t ) B ( u з ( t ) K x( t )) ( A BK ) x( t ) B u з ( t ) .
Динамические
свойства
замкнутой
системы
(9.3)
полностью
определяются характеристическими числами матрицы (A – BK). Полюса
замкнутой системы могут быть произвольно размещены на комплексной
плоскости путем соответствующего подбора элементов матрицы K тогда и
только тогда, когда система вполне управляема.
Желаемые динамические свойства системы, следовательно, и
желаемое качество процессов управления может быть заложено в систему
путем формирования линейной обратной связи по состоянию, значение
которой может быть найдено аналитически.
48
Процедура синтеза содержит этапы:
1. Формирование желаемого характеристического полинома *(p) по
заданному расположению полюсов замкнутой системы ;
2. Определение характеристического многочлена замкнутой системы
( p; kij ) det( pE ( A BK )) ;
3. Основное условие синтеза *(p) ( p; kij ) позволяет получить
систему уравнений относительно элементов kij.
4. Решение системы уравнений приводит к определению значения
неизвестных коэффициентов матрицы обратной связи К.
Для вполне управляемой системы возможно осуществить синтез с
любым качеством динамических процессов в замкнутой системе. В
реальных системах, при наличии различных ограничений на координаты
состояния,
на
управление,
качество
процесса
управления
также
оказывается ограниченным. Задача оптимального синтеза состоит в том,
чтобы найти такое допустимое управление, которое доставляло бы системе
максимально возможное качество движений.
Цель работы
Освоение метода аналитического синтеза замкнутой системы с
заданным качеством.
Литература
1. [4] стр. 287-309;
2. [5] стр. 62-72
Порядок выполнения работы
1. Убедиться в полной управляемости системы. Определить полюса
системы {. Собрать структурную схему внутренней модели системы
49
второго порядка согласно варианту задания. Задать ненулевые
начальные условия движения системы x(0) , а uисх (t ) 0 .
2. Получить и зарисовать в отчет переходные процессы свободного
движения системы по обеим координатам состояния x1 (t ) и x2 (t ) и
соответствующую им фазовую траекторию движения системы. Для
получения фазовой траектории
x2 ( x1 )
в приложении Simulink
используется блок XY Graph, графопостроитель в системе полярных
координат.
3. Рассчитать коэффициенты k1 и k2 обратных связей, таких, чтобы
замкнутая система имела полюса {*}, указанные в варианте задания.
4. Ввести обратные связи в систему, получить и зарисовать в отчет
переходный процесс управляемого движения и соответствующую ему
фазовую траекторию движения системы.
Mux
Scope
Mux
X1
X2
X1
U*
XY Graph
-K1
Gain
X2
-K2
-K1*X1-K2*X2
Gain1
Subsystem
Рис.9.1. Схема для выполнения лабораторной работы в приложении Simulink.
Схема для моделирования в приложении Simulink приведена на
рис.9.1. В блоке Subsystem находится структурная схема исходной
разомкнутой системы управления.
Для моделирования выбрать метод симуляции с фиксированным
шагом. Для первого опыта время моделирования в лабораторной работе
принять не более 1с, если исходная система неустойчива; 5с, если система
50
устойчива (оценка устойчивости системы производится по найденным
полюсам {); шаг моделирования 0,01с. Для второго опыта время
моделирования определить по спектру желаемых полюсов.
Содержательная часть отчета должна включать: расчет величин
обратных связей K ; подробную схему моделирования внутренней
модели исходной системы согласно заданному варианту; переходные
процессы и фазовые траектории исходной разомкнутой и синтезированной
замкнутой системы.
Контрольные вопросы
1. Что означает определение «вполне управляемая система»?
2. Как найти желаемый характеристический многочлен системы, если
известны полюса системы?
3. Какова связь между спектром полюсов линейной динамической
системы и видом ее фазовых траекторий?
4. Чем определяется качество переходных процессов в системе?
5. Как по фазовой траектории движения линейной системы дать
суждение об ее устойчивости?
6. Каким переходным процессам соответствуют фазовые траектории
линейной системы типа:
а) узел;
б) фокус;
в) седло;
г) центр?
7. Известна фазовая траектория движения системы с начальными
условиями (x1(0); x2(0))T. Как будет выглядеть фазовая траектория
линейной системы построенная из другой начальной точки?
8. Как выглядит переходной процесс и фазовые траектории, если спектр
полюсов системы {}:
а) {a jb};
б) { jb};
в) {a, b}?
51
9. В чем заключается процедура синтеза замкнутой системы с линейным
регулятором по состоянию?
10. Чем отличается синтез регулятора А.М. Летова от других методов
синтеза?
Варианты задания
(2): A, B, C
№
варианта
{*}
{н}
A
B
С
1.
2 0
3 1
1
2
(–2; 1)
{–2; –4}
{50100j}
2.
2 1
4 2
2
1
(-1; -2)
{–24j}
{-5050j}
3.
2 2
2 2
2
2
2
2
{2j}
{–2520j}
4.
6 1
4 1
4
1
5
2
{4j}
{–4020j}
5.
1 2 ,6
5
5
3
2
2
4
{–1; –4}
{–5025j}
6.
3 3
4
2
4
1
1
3
{–12j}
{–5040j}
7.
5 13
5
2
3
1
2
2
{–15j}
{–2550j}
8.
7 55,25
1 6,25
1
2
7
3
{–2,5; –4}
{–7550j}
9.
1 0,75
1
4
2
2
5
4
{–14j}
{–3050j}
10.
5 5,29
7 7
4
2
1
4
{–42j}
{–4050j}
52
11.
4 0
2
1
2
1
5
4
{3j}
12.
2 12
1
1
2
3
2
4
{–42j}
53
{–5040j}
{–4025j}
Лабораторная работа №10
Синтез наблюдателя состояния системы
В реальных системах чаще всего для измерения доступна лишь
линейная комбинация координат состояния y(t ) C x (t ) .
Задача восстановления координат состояния системы состоит в
том, чтобы найти оценки вектора состояния
x ( t ) по результатам
измерения выхода системы y(t).
Динамическая система
xˆ (t ) F xˆ (t ) G y (t ) N u(t )
называется
асимптотическим
наблюдателем
(10.1)
полного
порядка
для
линейной системы (n): A, B, C; если для любого начального состояния
x( 0 ) и для всех u(t), при t0 оценка
x ( t ) с ростом времени
асимптотически приближается к наблюдаемому вектору состояния x(t).
Структура асимптотического наблюдателя описывается уравнением
xˆ (t ) ( A GC ) xˆ (t ) G y (t ) Bu(t ) .
(10.2)
Задача синтеза наблюдателя состоит в том, чтобы найти значения
неизвестных коэффициентов матрицы G. Это возможно сделать, исходя из
условия асимптотической сходимости оценки x ( t ) к вектору состояния
x(t) при любых начальных состояниях наблюдателя и системы. Ошибка
восстановления x (t ) xˆ (t ) (t ) , описывается линейным однородным
дифференциальным уравнением
(t ) ( A GC ) (t ) ,
(10.3)
а поэтому асимптотическая сходимость ошибки к нулю возможна тогда,
когда собственные числа матрицы (A – GC), т. е. полюса наблюдателя,
располагаются в левой полуплоскости.
54
Синтезировать наблюдатель полного порядка возможно лишь для
вполне наблюдаемой системы.
Структура наблюдателя полного порядка очевидно избыточна, так
как в ней определяются и те координаты состояния, которые доступны для
измерения.
Асимптотические
наблюдатели
линейной
системы,
вычисляющие лишь часть оценок координат состояния, недоступных для
измерения,
называют
наблюдателями
неполного
порядка
или
наблюдателями Люинбергера.
Цель работы
Изучение применения наблюдателей для восстановления координат
состояния системы.
Литература
1. [4] стр. 287-309;
2. [5] стр. 62-72
Порядок выполнения работы
1. Использовать для синтеза наблюдателя систему второго порядка
согласно варианту задания для лабораторной работы №9. Убедиться,
что
данная
система
является
вполне
наблюдаемой.
Собрать
структурную схему внутренней модели. Задать ненулевые начальные
условия движения системы x(0) ,а uисх (t ) 0 .
2. Осуществить синтез асимптотического наблюдателя полного порядка с
заданным расположением полюсов {н}. Варианты заданий приведены
в лабораторной работе №9.
3. Собрать структурную схему наблюдателя. Задать для наблюдателя
нулевые начальные условия движения. Схема для моделирования в
приложении Simulink приведена на рис.10.1. В блоке Subsystem с
именем А, В, С находится структурная схема исходной разомкнутой
55
системы управления, в подсистеме с именем A-GC, B, C – структурная
схема наблюдателя.
X1
Mux
U*
X2
Mux1
Scope1
Y
A,B,C
U*
X1^
dX1^/dt
X2^
G1
Mux
Gain
Mux
G2
dX2^/dt
Gain1
Scope
Y^
A-GC , B , C
Рис.10.1. Схема для выполнения лабораторной работы в приложении Simulink.
4. Наблюдать переходной процесс в системе и наблюдателе. Зарисовать
переходные процессы по координатам состояния и соответствующим
оценкам наблюдателя на одном графике, используя для получения
графиков блоки Mux и Scope.
Для моделирования выбрать метод симуляции с фиксированным
3
шагом, время моделирования в лабораторной работе t м
, шаг
Reн
моделирования 0,01с.
Содержательная
коэффициентов
часть
обратных
отчета
связей
должна
наблюдателя;
включать:
расчет
подробную
схему
моделирования для заданного варианта; переходные процессы по каждой
координате состояния для исходной системы и оценки наблюдателя.
Контрольные вопросы
1. Что называют асимптотическим наблюдателем полного порядка?
2. Как формулируют необходимое и достаточное условие возможности
синтеза наблюдателя?
56
3. Что называют асимптотическим наблюдателем неполного порядка?
4. Как следует выбирать полюса наблюдателя?
5. В чем заключается идея построения наблюдателя неполного порядка?
6. В чем заключается задача восстановления состояния системы?
7. Какова структура наблюдателя Люинбергера?
8. В чем заключается задача синтеза замкнутой системы с наблюдателем
состояния?
9. Как выбирают спектр полюсов замкнутой системы с наблюдателем?
10. Каков порядок системы с наблюдателем полного порядка?
57
Лабораторная работа №11
Синтез замкнутой системы с наблюдателем состояния.
Если необходимо синтезировать регулятор замкнутой системы, у
которой не все координаты состояния доступны для измерения, то
используется
наблюдатель состояния, в котором восстанавливаются
недостающие координаты вектора состояния, используемые в дальнейшем
для формирования закона управления. Модель такой замкнутой системы
представляется в виде объединения двух моделей:
модели исходной
разомкнутой системы и модели наблюдателя с регулятором
x (t ) A x (t ) Bu(t ), x (0)
y (t ) C x (t )
xˆ (t ) F xˆ (t ) G y (t ) N u(t ), xˆ (0) 0
u(t ) K xˆ (t )
(11.1)
Исключив из описания системы переменные u(t ) и y (t ) , получим
упрощенную модель
x (t ) A x (t ) BK xˆ (t ), x (0)
xˆ (t ) ( A GC ) xˆ (t ) GC x (t ) BK xˆ (t ), xˆ (0) 0
(11.2)
Порядок такой замкнутой системы равен 2n, вектор состояния состоит
из x (t ),
xˆ (t ), матрица состояния имеет вид
A
GC
BK
.
A GC BK
Спектр характеристических чисел вполне управляемой и вполне
наблюдаемой замкнутой системы есть объединение полюсов регулятора и
полюсов наблюдателя. Полюса регулятора могут быть произвольно
расположены на комплексной плоскости путем соответствующего подбора
матрицы К, а полюса наблюдателя - могут быть произвольно расположены на
58
комплексной плоскости путем соответствующего подбора матрицы G.
Асимптотически устойчивые регулятор и наблюдатель обеспечивают
асимптотическую устойчивость замкнутой системы управления.
Цель работы
Освоение метода аналитического синтеза замкнутой системы с
заданным качеством с применением наблюдателя для восстановления не
измеряемых координат состояния системы.
Литература
1. [4] стр. 287-309;
2. [5] стр. 62-72
Порядок выполнения работы
1. Используя синтезированный в лабораторной работе №10 наблюдатель
координат состояния линейной динамической системы, замкнуть систему
обратными связями, величины которых рассчитаны в лабораторной
работе№9. Схема для моделирования приведена на рис.11.1.
X1
Mux
U*
X2
Mux1
Scope1
Y
A,B,C
XY Graph
G1
U*
X1^
dX1^/dt
X2^
Mux
Mux
Gain
G2
Gain1
dX2^/dt
Scope
Y^
A-GC , B , C
-K1
Gain2
-K2
Gain3
-K1*X1^-K2*X2^
Рис.11.1. Схема для выполнения лабораторной работы в приложении Simulink.
59
2. Задать нулевые начальные условия для наблюдателя x̂ (0) и отличные от
нуля начальные условия для исходной системы x(0) . Синтезированное
управление u (t ) k1 x1 (t ) k2 x2 (t ) подать на вход исходной разомкнутой
системы и наблюдателя.
3. Наблюдать переходной процесс в системе и наблюдателе. Зарисовать
переходные процессы по координатам состояния и соответствующим
оценкам наблюдателя на одном графике, используя для получения
графиков блоки Mux и Scope. Получить и зарисовать фазовую траекторию
x2 ( x1 ) , используя блок XY Graph.
Для моделирования выбрать метод симуляции с фиксированным шагом,
время моделирования в лабораторной работе принять t м
3
Re
,
шаг
моделирования 0,01с.
Содержательная часть отчета должна включать: схему моделирования;
переходные процессы по каждой координате состояния системы и ее оценке
после замыкания системы регулятором Летова А.М в котором используются
оценки координат состояния xˆ (t ) ; фазовую траекторию движения системы.
Контрольные вопросы
1. В каких условиях задача линейного синтеза замкнутой системы
разрешима?
2. Как выглядит канонически управляемое представление внутренней
модели системы?
3. Изобразить
структурную
схему
канонически
управляемого
представления системы?
4. Какова структура замкнутой системы управления с наблюдателем в
контуре управления?
60
5. Каковы условия асимптотической устойчивости системы с наблюдателем
в контуре управления?
6. Каков порядок системы с наблюдателем полного порядка и регулятором
А.М. Лётова?
7. В каких случаях возможен синтез статического наблюдателя координат
состояния?
8. Каким образом, используя понятие передаточной функции, дать
суждение о том, что систем не является вполне управляемой или
наблюдаемой?
9. Каков спектр полюсов замкнутой системы управления с наблюдателем в
контуре управления?
10. В каком случае необходим синтез замкнутой системы управления с
наблюдателем в контуре управления?
61
Лабораторная работа №12
Синтез оптимальной по быстродействию
замкнутой системы
Синтезировать оптимальную по быстродействию линейную систему
означает определить такое допустимое управление u(t), которое приводит
систему из начального состояния x(0) в требуемое равновесное состояние
x(T)=0 и минимизирует при этом время перехода T.
Для системы второго порядка с ограниченным управлением
(2)
: x A x B u , x( 0 ),
(12.1)
y x , |u| um ,
оптимальное управление согласно принципу максимума Понтрягина
достигается при
u* ( t ) um sgn B T ( t ),
(12.2)
где вспомогательная функция ( t ) удовлетворяет уравнению
AT .
Задача
синтеза
оптимального
управления
(12.3)
была
бы
решена
полностью, если бы была известна (t). Однако начальное условие (0)
неизвестно. В некоторых случаях можно утверждать, что функция (t)
меняет знак не более одного раза. Следовательно, оптимальное управление
имеет не более одного переключения. Зная это, можно синтезировать
оптимальное управление методом фазовой плоскости.
Например, для системы
x1 x2 ,
x 2 u , |u| 1,
уравнения фазовых траекторий при u 1:
62
(12.4)
x22
x1 ( x2 )
C1 ,
2
(12.5)
x22
x1 ( x2 )
C2 ,
2
(12.6)
а при u 1:
где С1 и С2 – постоянные интегрирования. Движение должно завершиться
в начале координат, поэтому участки фазовых траекторий L+ и L–,
проходящие через начало координат (рис. 21.1, а, б), будут составлять
линию переключения L, уравнение которой
L ( x1 , x2 ): x1 0,5 x22 sgn x2 .
(12.7)
Движение из произвольной точки (рис. 12.1, в) проходит по
параболе, направленной по управляющему сигналу +1 или –1.
x2
x2
L+
x1
x1
L
u=1
a)
u=-1
б)
x2
A
u*=-1
O
x1
L
u*=1
B
в)
Рис. 12.1.Фазовые траектории движения системы при различных управлениях.
63
При достижении линии переключения L управление должно
поменять знак, тогда последующее движение будет совершаться по
фазовой траектории L+ или L– в начало координат. Можно доказать, что
достигнутое
при
таком
управлении
время
движения
является
минимальным из всех возможных.
Регулятор замкнутой оптимальной системы определяет взаимное
расположение
текущего
состояния
системы
относительно
линии
переключения и текущее значение оптимального управления. Уравнение
регулятора для рассмотренного примера
u* sgn( x1 0,5x22 sgn x2 ) .
(12.8)
Оптимальные системы управления являются идеальными в том
смысле, что невозможно точно воспроизвести в реальной системе
расчетные характеристики всех компонентов, модель объекта лишь
ограниченно
адекватна,
переключения
а
поэтому
ограниченно
воспроизводящая
линию
точен;
аналитический
нелинейная
переключения,
не
может
расчет
линии
характеристика,
быть
точно
сформирована. Эти и подобные причины приводят к потерям во времени, к
появлению скользящих режимов, автоколебаний. Все вышеуказанные
явления делают систему квазиоптимальной.
Цель работы
Изучение метода синтеза оптимальных по быстродействию систем.
Исследование характеристик модели квазиоптимальной системы.
Литература
1. [4] стр. 396-402;
2. [5] стр. 62-72;
3. [1] стр.376-380.
64
Порядок выполнения работы
1. Собрать согласно заданному варианту структурную схему объекта
управления второго порядка.
2. Найти аналитическое выражение линии переключения L(x1, x2) для
своего варианта и получить уравнение регулятора.
3. Собрать схему замкнутой системы управления с регулятором.
4. Изменяя начальные условия движения системы, исследовать свойства
и характеристики системы. Зарисовать в отчет фазовый портрет
системы. Определить момент переключения управления.
5. Изменить структуру регулятора, реализовав закон управления
а) u* sgn x1 ;
б) u* sgn( x1 x2 ) .
Зарисовать фазовые траектории движения квазиоптимальной системы.
Сравнить их с оптимальной траекторией.
Для моделирования выбрать метод симуляции с фиксированным
шагом. Время интегрирования в лабораторной работе подобрать таким
образом, чтобы процесс стабилизации состояния системы завершился; шаг
моделирования – 0,01 с.
Контрольные вопросы
1. В чем заключается задача оптимального управления?
2. В чем заключается принцип максимума Понтрягина для задачи синтеза
оптимальной по быстродействию системы?
3. Какова верхняя граница числа переключений для линейного объекта
порядка n?
4. Каковы причины возникновения скользящих и автоколебательных
режимов в квазиоптимальных системах?
65
5. Что такое линия (поверхность) переключения?
6. Каков
вид
линий
переключения
систем
второго
порядка
с
характеристическими числами
а) чисто мнимыми;
б) действительными отрицательными;
в) действительными разного знака;
г) равными нулю?
7. Что такое скользящий режим?
8. Как аналитически найти время движения по квазиоптимальной
траектории?
9. Какими
свойствами
должна
обладать
система,
для
определяется оптимальное управление?
10. Каковы пути реализации сложных линий переключения?
Варианты задания
№
варианта
(2)
: A, B ,( C E )
№
варианта
A
B
1.
0
1
0 2
1
2
2.
0
3
0 4
3.
(2)
: A, B ,( C E )
A
B
6.
3 0
0 2
3
2
3
4
7.
0
0
0 1
1
1
0
2
0 1
2
1
8.
0 1
0 0
0
5
4.
0 0
2 0
1
0
9.
2 0
0 0
2
2
5.
0 1
0 0
0
2
10.
1 0
0 1
1
1
66
которой
Лабораторная работа №13
Моделирование характеристик нелинейных элементов
систем автоматического управления
Нелинейной системой автоматического управления называется такая
система, которая содержит хотя бы одно звено, описываемое нелинейным
уравнением. Выделяют несколько основных типов нелинейных звеньев:
звенья релейного типа;
звенья с кусочно-линейной характеристикой;
звенья с криволинейной характеристикой;
нелинейные звенья, уравнение которых содержит произведение
переменных или их производных.
Модели нелинейных систем представляют в виде линейных
уравнений
всех
звеньев
системы,
для
которых
это
допустимо.
Существенно нелинейные звенья описывают со всеми допустимыми
упрощениями
нелинейной
Характеристика
«вход-выход»
представлена
графически
или
характеристикой
нелинейного
в
виде
звена
«вход-выход».
может
аналитической
быть
нелинейной
зависимости.
Цель работы
Изучение метода моделирования и преобразования характеристик
нелинейных элементов
Литература
1. [4] стр. 94-102;
2. [5] стр. 125-135;
3. [7] стр. 304-307;
4. [1] стр. 497-501.
67
Порядок выполнения работы
1. Нелинейное звено задается графической характеристикой. Вид звена и
его параметры определяются вариантом задания.
2. Описать нелинейное звено аналитической зависимостью «входвыход».
3. Используя типовые нелинейные блоки моделирующего пакета по
заданию преподавателя собрать структурную схему нелинейного звена.
Исследовать характеристики заданного звена, для чего подать на вход
звена гармонический сигнал. Амплитуду и период задающего
гармонического генератора подобрать из соображений наиболее
полного построения графической характеристики, то есть амплитуда
входного
сигнала
соответствующую
должна
охватить
существенной
область
определения
нелинейности
графической
характеристики.
4.
Наблюдать и зарисовать в отчет переходный процесс и характеристику
«вход-выход» звена.
Для моделирования выбрать метод симуляции с фиксированным
шагом. Время моделирования в лабораторной работе принять равным двум
периодам задающего генератора, шаг моделирования - 0,01 с.
Содержательная
часть
отчета
должна
включать:
подробную
структурную схему моделирования нелинейного звена; переходной
процесс; характеристику «вход-выход» нелинейной характеристики.
Контрольные вопросы
1. Как изображаются и описываются типовые нелинейности: «знак»;
«ограничение»;
«зона
нечувствительности»;
«релейная»
характеристика, «люфт»?
2. Как описываются характеристики комбинированных нелинейностей?
3. Какие нелинейные зависимости являются нереализуемыми?
68
4. Какие реальные физические явления описываются нелинейными
зависимостями?
5. Как выглядит нелинейная зависимость при соединении нелинейных
элементов:
а) последовательно;
б) параллельно; в) встречно-параллельно?
6. Какие известны методы анализа и решения нелинейных уравнений?
7. Что такое автономная нелинейная система?
8. Для чего производят линеаризацию нелинейных характеристик?
9. Что такое неоднозначная нелинейная характеристика? Какие примеры
неоднозначных характеристик вам знакомы?
10. Каковы правила преобразования структурных схем, содержащих
нелинейности?
Варианты задания
0
-
k
k
02 sgn
0
0
-
- 0
-1
1
- 0
k1
03
-1
k2
1
- 0
k1>0
k
0
0
0
k1
k2
2
1
3
1
2
1
3
1
1
3
2,5
0,75
2
0,5
0,3
0
k1
-
k1<0
k2
k
0
k
- 0
-
0,5 2,5
0
-3
2
k2
3
0 e-||
k3
k1
k1
k2
0
k
0
0
k1 k2 k3
-2
4
1
1
3
2
3
1
2
0,1 1
2
1
-3
1
2,5
2
1
4
1
2
1
0,1 3
1
1
69
Лабораторная работа №14
Анализ фазового портрета нелинейной системы
Нелинейной системой автоматического управления называется
система,
содержащая
хотя бы
одно
звено,
которое
описывается
нелинейной зависимостью. Внутреннюю модель нелинейной системы
составляют уравнения
x F ( x,u)
y G(x),
(14.1)
где x(t ) ( x1 (t ) x2 (t ) xn (t ))T - вектор состояния;
y(t), u(t) - вектор выхода и вектор управления;
F(x, u), G(x) – нелинейные векторные дифференциальные уравнения.
Для анализа нелинейных систем используют понятие фазового
пространства ( x1, x2 , xn )T X .
…
Хn
X(0)
М
Х1
Х2
Рис. 14.1.Фазовая траектория движения системы.
В реальной системе управления координаты состояния системы
x1 , x2 xn имеют в каждый момент времени вполне определенные
значения,
это
соответствует
вполне
определенному
положению
изображающей точки M в пространстве состояний. С течением времени
70
величины x1 , x2 xn изменяются, что соответствует перемещению точки M
по ориентированной кривой, называемой фазовой траекторией в фазовом
пространстве X (рис. 14.1). Совокупность фазовых траекторий называется
фазовым портретом системы. Для определения фазового портрета
системы
нужно
найти
решения
дифференциальных
уравнений,
составляющих модель системы. Фазовый портрет нелинейной системы, в
отличии от фазового портрета линейной системы, в общем случае
неоднороден.
Нелинейная
система
может
иметь
счетное
или
континуальное количество особых точек.
Цель работы
Изучение методов построения и анализа фазового портрета
нелинейной системы.
Литература
1. [4] стр. 102-112;
2. [5] стр. 125-135;
3. [1] стр. 497-501.
Порядок выполнения работы
Модель
нелинейной
системы
второго
порядка
определяется
уравнениями соответствующего номера варианта.
1. Ввести канонические координаты состояния x1 и x2.
2. Найти точки покоя системы, для чего приравнять к нулю фазовые
скорости x1 и x 2
3. Собрать структурную схему нелинейной системы
x1 f1 ( x1 , x2 )
,
x2 f 2 ( x1 , x2 )
используя блоки моделирующего пакета.
71
4. Задавая различные начальные условия, получить несколько фазовых
траекторий свободного движения системы. Для получения фазовой
траектории x2 ( x1 ) в приложении Simulink используется блок XY Graph,
графопостроитель в системе полярных координат.
В отчете изобразить структурную схему моделирования нелинейной
системы и полученный фазовый портрет.
Контрольные вопросы
1. Что такое начальная точка фазовой траектории?
2. Каков вид фазового портрета для:
а) линейной асимптотически устойчивой системы;
б) линейной неустойчивой системы;
в) системы, находящейся в предельно устойчивом состоянии?
3. Что такое особые точки фазового портрета системы и как их найти?
4. Каким
образом
определяется
локальный
фазовый
портрет
в
окрестности особой точки?
5. Как выглядит фазовый портрет системы в окрестности особой точки,
если характеристические числа локального представления системы:
а) комплексные с отрицательной вещественной частью;
б) чисто мнимые;
в) вещественные отрицательные;
г) вещественные различного знака?
6. Какими способами можно получить фазовый портрет системы?
7. Как определить размерность фазового пространства?
8. Какие методы решения нелинейных дифференциальных уравнений
существуют?
9. Что такое автономная нелинейная система?
10. Как найти время движения по фазовой траектории?
72
Варианты заданий
Вариант 1.
Вариант 6.
x1 x1 (2 x1 2 x2 )
x2 x2 (2 2 x1 x2 )
Начальные условия движения
1
x1 ( x1 x2 )(1 x1 x2 )
3
x2 x1(2 x2 )
Начальные условия движения
- 0.01 0.01 2.3 0.75 0.1
,
, ,
,
- 2 1 - 1 3 - 3 10
0.1 0.1 2 0.75 0.75 , , ,
, ,
0.5 - 1 - 1 10.75 1 7
Вариант 2.
Вариант 7.
x1 x1(2 x2 )
x2 x2 (3 x1 )
Начальные условия движения
x1 x2
x2 x1 sin x2 / x2
Начальные условия движения
1 2 0.5 - 0.5 - 1
, , ,
,
2 0.5 1 5 - 5
0 0 0 0 0
,
, , ,
0.03 0.32 1.6 2.2 2.83
Вариант 3.
y sin y 0
Вариант
y 0.5 y sin y 0
Начальные условия движения
Начальные условия движения
0 3 1.5 0 2.5 0
, , , , , ,
0.5 3 0 2 0 4.5
0 0 1.5 0 2.5 0.5 0
, , , , ,
, ,
0.5 3 0 2 0 - 0.5 4.5
Вариант 4.
Вариант 9.
x1 x1( x1 2 x2 )
x2 x2 (2 x1 x2 )
Начальные условия движения
x1 x1 x2
2
2
x2 x1 x2
Начальные условия движения
0.5 - 1 1 1 - 1
, , , ,
0.5
1 - 1 1 - 1
0.5 - 1 1 1 - 1
, , , ,
0.5
1 - 1 1 - 1
Вариант 5.
Вариант 10.
x1 x22
x2 x1
Начальные условия движения
y ( y 2 1) y y 0
Начальные условия движения
- 1 1 - 2 - 3 0.1
, , , ,
- 1 - 2 - 3 1 0.1
1 - 1 - 1 7 0.5 2
, , , , ,
1 1 - 2 10 0.7 - 5
73
Лабораторная работа №15
Гармоническая линеаризация нелинейных систем
Замена нелинейного элемента в системе автоматического управления
на линейный, установившаяся реакция которого на гармоническое
воздействие почти совпадает с реакцией нелинейного элемента, называется
гармонической линеаризацией.
u(t)
(t)
()
z(t)
W(p)
y(t)
-1
Рис.15.1.Каноническая структура замкнутой нелинейной системы.
Для нелинейной системы, заданной своей канонической структурой,
изображенной на рис. 13.1, входной сигнал u(t) является гармоническим
u (t ) Asin t .
Если в цепи прямого тракта имеется фильтр высоких частот и
характеристика
нелинейного
элемента
()
кососимметричная,
то
нелинейный элемент может быть заменен на линейный с комплексным
коэффициентом усиления или описывающей функцией N(A). Функция N(A)
есть отношение комплексной амплитуды первой гармоники выходного
сигнала к комплексной амплитуде входного сигнала.
N ( A) k1 ( A) jk2 ( A) ,
где вещественная часть N(A):
мнимая часть N(A):
k1 ( A)
2
( Asin t )sin t dt ;
A 0
2
k 2 ( A)
( Asin t )cost dt .
A 0
74
(15.1)
Задача
гармонической
линеаризации
состоит
в
определении
описывающей функции N(A) нелинейного элемента.
Коэффициенты k1(A) и k2(A), постоянные при постоянных значениях
амплитуды входного сигнала, будут изменяться при изменении амплитуды
входного сигнала.
Цель работы
Изучение
элементов.
метода
Изучение
гармонической
метода
линеаризации
экспериментального
нелинейных
определения
описывающей функции нелинейного элемента.
Литература
1. [4] стр. 122-123;
2. [5] стр. 135-144;
3. [1] стр. 542-549.
Порядок выполнения работы
1. Для
нелинейного
элемента
с
параметрами,
соответствующими
варианту задания, аналитически рассчитать значения N ан ( A) для
входных сигналов с амплитудой A = 1, 2 ... 10,20.
2. Собрать структурную схему нелинейного элемента, если заданный
нелинейный элемент отсутствует в библиотеке моделирующего пакета.
В качестве коэффициента гармонической линеаризации использовать
пропорциональное звено, коэффициент усиления которого N эксп ( A)
можно изменять. Объединить входы нелинейного и линейного
элементов. Подавая на объединенный вход гармонический сигнал с
амплитудой
A = 1, 2 ... 10,
наблюдать
y (t ) линейного элементов.
нелинейного и ~
75
выходной
сигнал
y (t )
3. Собрать схему, позволяющую определить разность (t ) y(t ) ~
y (t )
между выходным сигналом нелинейного элемента и выходным
сигналом пропорционального звена, а так же разность, накопленную за
T
период задающего сигнала Т: (t ) ( y(t ) ~
y (t ))dt
0
4. Подавая на объединенный вход схем гармонический сигнал с
амплитудой A = 1, 2 ... 10, экспериментально подобрать для каждого
опыта значение коэффициента усиления N эксп ( A) такое, при котором
сигнал (t ) будет минимальным. В случае точной компенсации
проинтегрированный сигнал ошибки имеет нулевое значение в момент
времени равный половине периода входного сигнала. Данные занести в
таблицу.
Таблица 15.1.
A
1
2
3
4
5
6
7
8
9
10
20
N эксп (A)
N ан (A)
Схема для моделирования в приложении Simulink
приведена на
рис.15.2.
Y(t)
Y¨(t)
e(t)
u(t)
Mux
Scope
Sine Wave
F(e)
Sum
Mux1
1
K(A)
s
Integrator
Km
Gain1
Gain
Рис.15.2. Схема для выполнения лабораторной работы в Simulink
76
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования в лабораторной работе t м T , где Т – период
задающего генератора, шаг моделирования 0,01с. В схеме моделирования
коэффициент
Km
является
масштабирующим
для
сигнала
проинтегрированной разности и позволяет более точно подобрать
коэффициент гармонической линеаризации К(А). В работе принять его
равным 3 6 .
Содержательная
часть
отчета
должна
моделирования;
заполненную
таблицу
гармонической
линеаризации
заданного
включать:
значений
схему
коэффициента
нелинейного
элемента;
построенные на одном графике зависимости N ан ( A) и N эксп ( A) .
Контрольные вопросы
1. В чем заключается сущность метода гармонической линеаризации?
2. Какие еще методы линеаризации известны и в чем заключается их
сущность?
3. Какими свойствами должна обладать характеристика нелинейных
элементов при применении гармонической линеаризации?
4. В каком случае у комплексного коэффициента усиления отсутствует
мнимая составляющая?
5. Когда в выходном сигнале нелинейного элемента присутствует
постоянная составляющая?
6. Для чего в цепи прямого тракта необходим фильтр высоких частот?
7. Что такое эквивалентный комплексный коэффициент усиления
нелинейного элемента?
8. Каков спектр выходного сигнала нелинейного элемента при подаче на
его вход гармонического сигнала.
77
9. Каким уравнением описывается
выходной
сигнал нелинейного
элемента после гармонической линеаризации?
10. Зависит ли N(A) от частоты входного сигнала? Что такое амплитудный
годограф N(A)?
Варианты задания
№
Нелинейный
Параметры
0
элемент
1
02 sgn
-
- 0
0
-
3
- 0
4
-
k
-1
4
2
3
5
1,5
2
5
1
8
1
2
1
3
1,5
9
k
5
0
5
-
- 0
0
-1
1
- 0
k1
8
3
2
2
1
3
3
4
3
2
1
1
1
2
3
1
-2
-1
4
4
2
-3
1
1
-2
2
1
1
0,1
0,4
k2
k1
9
-
k2
k1<0
1
3
6
2
1
2
0,2
k1>0
3
0,5
1
2
k1 k2
0,7
4
1
1
4
0,5
03
7
3
2
1
- 0
7
0
2
0
6
Параметры
0
элемент
1
- 0
Нелинейный
k
3
4
0
№
0
10
k
78
k
- 0
5
1
0,5
1
6
5
3
2
Лабораторная работа №16
Исследование режима автоколебаний в нелинейных
системах
Автоколебания – устойчивые собственные колебания с постоянной
амплитудой
при
Возникновение
в
отсутствии
системе
внешних
колебательных
автоколебаний
приводит
воздействий.
к
тому,
что
установившееся состояние системы становиться невозможным.
Рассмотрим
нелинейную
систему
канонической
структуры,
представленную на рис.16.1.
u(t)
(t)
()
z(t)
W(p)
y(t)
-1
Рис.16.1.Каноническая структура нелинейной замкнутой системы управления.
Для этой системы сигнал ошибки в установившемся режиме
(t ) u (t ) k ( )z (t )d ,
(16.1)
0
где z (t ) ( (t )) -выходной сигнал нелинейной части системы,
k (t ) - импульсная функция линейной части системы.
При возникновении в этой системе автоколебаний имеет место
соотношение
авт (t ) k ( )( авт (t ))d ,
(16.2)
0
где авт (t ) Ae jt -гармонический сигнал.
Гармонически линеаризованный выходной сигнал нелинейного
элемента ()
( авт (t )) N ( A) авт (t ) N ( A) Ae jt ,
(16.3)
поэтому для возникновения в системе автоколебаний необходимо, чтобы
79
N ( A)W ( j ) 1.
(16.4)
Графическая интерпретация условия (16.2) означает, что на
комплексной
плоскости
характеристики
линейной
имеет
место
части
системы
пересечение
частотной
и
инверсного
W(j)
отрицательного комплексного коэффициента гармонической линеаризации
–N-1(A). По каждой из этих характеристик определяются
параметры
автоколебаний – амплитуда и частота.
Цель работы
Определить влияние изменения структуры и параметров системы на
возникновение автоколебаний. Изучить метод определения параметров
автоколебаний по фазовому портрету системы.
Литература
1. [4] стр. 244-252;
2. [5] стр. 144-155;
3. [1] стр. 549-559.
Порядок выполнения работы
1. Собрать структурную схему нелинейной системы, задав в качестве
линейной
части
последовательное
соединение
инерционного
и
интегрирующего звеньев с параметрами T1 и k1 соответствующего
варианта. В линейную часть системы ввести канонические координаты
состояния: y (t ) x1 (t ), x1 (t ) x2 (t ) . Получить описание линейной части
системы в виде x (t ) Ax(t ) Bu(t ) . Входным сигналом для линейной
части является выходной сигнал нелинейного элемента
( ) .
Движение системы должно вынуждаться ненулевыми начальными
условиями, например (1; 1).
80
В качестве нелинейного элемента использовать трехпозиционное реле
с параметрами
и 0 соответствующего варианта. Наблюдать
процессы, возникающие в системе. Получить и зарисовать переходной
процесс и фазовую траекторию движения системы. Для получения
фазовой траектории x2 ( x1 ) в приложении Simulink используется блок
XY Graph, графопостроитель в системе полярных координат. Схема для
моделирования в приложении Simulink приведена на рис.16.2. В блоке
Subsystem находится структурная схема линейной части системы.
2. Заменить
нелинейный
элемент
на
трехпозиционное
реле
с
гистерезисом с параметрами 1 , 2 , 0 соответствующего варианта.
Получить и зарисовать переходной процесс и фазовую траекторию
движения системы для данного опыта.
XY Graph
W(p )
F ( e)
X2
e(t)
Mux
X1
Scope
Gain2
Mux
-1
Рис.16.2. Схема для выполнения лабораторной работы в приложении Simulink.
3. Включить
в
линейную
часть
системы
инерционное
звено
с
параметрами T2 и k2, используя блок Transfer Fcn, при этом
нелинейный
элемент
заменить
на
трехпозиционное
реле,
использованное в п. 2. Получить и зарисовать переходной процесс и
фазовую траекторию движения системы.
4. По полученным переходным процессам и фазовым траекториям
определить амплитуду и частоту автоколебаний.
81
5. Для каждого из трех приведенных опытов аналитически построить на
одном графике частотную характеристику линейной части системы и
инверсную отрицательную описывающую функцию нелинейного
элемента.
Определить
параметры
автоколебаний
по
данным
характеристикам
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 7 с; шаг моделирования 0,01 с.
Содержательная часть отчета должна содержать: подробную схему
моделирования; для каждой части работы необходимо привести графики
переходных процессов и фазовые траектории, по которым должны быть
определены
параметры
автоколебаний;
для
каждой части
работы
необходимо аналитически построить на одном графике частотную
характеристику линейной части системы и инверсную отрицательную
описывающую функцию нелинейного элемента, определить параметры
автоколебаний по данным характеристикам.
Контрольные вопросы
1. Что такое режим автоколебаний?
2. Каково условие возникновения автоколебаний в нелинейной системе?
3. Каким фазовым траекториям соответствует наличие в системе
автоколебаний?
4. Как
определить
параметры
автоколебаний
по
частотным
и
амплитудным годографам?
5. Как
определить
параметры
автоколебаний
по
фазовым
характеристикам?
6. Что такое устойчивые автоколебания? Как определить их наличие по
частотным и амплитудным годографам? Чему они соответствуют на
фазовом портрете системы?
82
7. Что такое неустойчивые и полуустойчивые автоколебания? Как
определить их наличие по частотным и амплитудным годографам?
Чему они соответствуют на фазовом портрете системы?
8. Что такое линия переключения?
9. Как влияет на возникновение в системе автоколебаний наличие
нелинейных элементов с гистерезисом?
10. Как влияет на возникновение в системе автоколебаний наличие в
линейной части системы звена запаздывания?
Варианты заданий
K1
T1 p 1
№
K2
T2 p 1
0
0
0
2 1
0
1
0
2
0
Φ0
K1
T1
K2
T2
λ
1
2
0,5
1
0,3
0,15
1
0,09 0,28
1
2
3
0,5
1
0,25
0,2
1
0,1
0,3
1
3
4
0,7
1
0,2
0,22
1
0,11
0,3
1
4
2
0,6
1
0,4
0,25
1
0,12 0,33
1
5
3
0,7
1
0,3
0,18
1
0,12 0,35
1
6
2
0,4
1
0,6
0,3
1
0,1
1
83
Φ0
λ1
λ2
0,29
Лабораторная работа №17
Исследование устойчивости нелинейных систем
автоматического управления
Невозмущенное движение называют устойчивым, если при заданной
сколь угодно малом можно найти такую область начальных условий
, что любое движение, начавшееся в этой области, будет, начиная с
какого то времени, отличаться от невозмущенного движения не более
чем на .
Реальные
системы
автоматического
управления
являются
нелинейными, следовательно, и фазовые портреты у них неоднородны. На
фазовом портрете нелинейных систем можно наблюдать более чем одну
точку
покоя,
могут
существовать
устойчивые
или
неустойчивые
предельные циклы, области возможных равновесных состояний системы.
При изучении нелинейной системы
x F(x),
x ( x1 ,x2 ,,xn )T
решают задачи:
исследование устойчивости в малом – исследование устойчивости
в достаточно малой окрестности особых точек системы;
исследование устойчивости в целом – исследование устойчивости
во всем фазовом пространстве системы;
исследование
абсолютной
устойчивости
–
исследование
устойчивости системы с существенно нелинейными звеньями.
Анализируя поведение системы x F(x) в окрестности особой точки
( x10 , x20 , xn0 )T ,
используют
уравнение
локального
линейного
приближения системы в окрестности номинального движения
x J ( x10 ,x20 ,xn0 ) x ,
84
(17.1)
где J ( x10 ,x20 ,xn0 ) - матрица Якоби нелинейной системы.
Суждение
об
устойчивости
выносят
по
значениям
корней
характеристического многочлена
(λ) det (E J ( x10 ,x20 ,xn0 ))
линейного приближения системы.
Для анализа нелинейных систем на устойчивость в целом
используют метод функций Ляпунова. Система x F(x) устойчива в
области, если в этой области существует скалярная положительно
определенная функция Ляпунова V(x) такая, что ее полная производная по
времени
в
силу
исследуемой
системы
является
отрицательно
определенной.
Задача анализа абсолютной устойчивости системы с единственной
однозначной нелинейностью решается при помощи частотного метода
В.–М. Попова.
Пусть графическое представление нелинейности () имеет любое
очертание,
не
выходящее
за
пределы
заданного
угла
arctg k:
: 0 ( ) k . Тогда для установления абсолютной устойчивости
нелинейной системы достаточно подобрать такое конечное действительное
число q, при котором для любых частот
Re( 1 j q ) W ( j ) 1 0 ,
k
(17.2)
где W(j) – частотная характеристика линейной части системы.
В графической интерпретации этого критерия достаточно подобрать
1
такую прямую, проходящую через точку с координатами , j 0 , чтобы
k
весь модифицированный годограф линейной части системы лежал под
этой прямой.
85
Цель работы
Применяя
проанализировать
критерии
устойчивости
динамику
нелинейных
нелинейных
систем
систем,
автоматического
управления в малом и в целом. Результаты анализа подтвердить
моделированием.
Литература
1. [4] стр. 225-244;
2. [5] стр. 144-155;
3. [1] стр. 514-539.
Порядок выполнения работы
1. Анализ устойчивости в окрестности особых точек.
1.1. Собрать структурную схему модели, заданной уравнениями
согласно варианту из таблицы 17.1. Предусмотреть возможность
задания начальных условий движения системы по каждой из
координат состояния.
1.2. Аналитически определить особые точки системы. Подбирая
начальные условия движения системы в малой окрестности
каждой особой точки, построить локальный фазовый портрет.
1.3. Аналитически дать оценку устойчивости в окрестности особых
точек. Результаты сравнить.
2. Исследование устойчивости в угле.
2.1. Собрать структурную схему канонической нелинейной модели
системы.
В
качестве
нелинейного
элемента
использовать
характеристику Dead Zone, величина зоны нечувствительности
которой
0.5 . Передаточную функцию линейной части
выбрать
согласно
варианту,
таблицы 17.2.
86
заданному
преподавателем
из
2.2. Экспериментально подобрать величины коэффициентов передачи,
при которых нелинейная система будет
а) устойчива;
б) неустойчива.
2.3. Аналитически
определить
сектор,
в
котором
должна
располагаться характеристика нелинейного элемента, при котором
положение равновесия системы будет устойчиво. Результаты
сравнить.
3. Исследование устойчивости в целом.
3.1. Собрать
структурную
дифференциальным
схему
уравнением
системы,
согласно
заданной
предложенному
варианту из таблицы 17.3. Используя функцию Ляпунова
V 0.5( x1 x2 ) , определить область устойчивости.
2
3.2. Задавая
2
различные
начальные
условия
внутри
области
устойчивости и снаружи, построить фазовый портрет нелинейной
системы.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования следует подбирать с учетом динамики
системы; шаг моделирования 0,01 с.
Содержательная часть отчета для каждой части работы должна
включать структурные схемы моделирования и подробное решение задачи,
описанной в плане работы.
Контрольные вопросы
1. Почему исследование устойчивости нелинейных систем отличается от
исследования устойчивости линейных систем?
2. Как анализируют характер движений системы в окрестности особых
точек?
87
3. В каком случае наблюдается локальный фазовый портрет типа:
а) «расходящийся фокус»;
4. Как
по
направлению
б) «центр»;
фазовой
траектории
в) «седло»?
дать
суждение
об
устойчивости системы?
5. Как выглядят фазовые траектории в окрестности предельного цикла в
случае:
а) полуустойчивых автоколебаний;
б) неустойчивых автоколебаний?
6. Как определяется по Ляпунову:
а) асимптотическая устойчивость;
б) устойчивость положения равновесия?
7. Что такое область устойчивости?
8. Как различаются понятия «устойчивости в малом» и «устойчивости в
целом»?
9. Какая функция может называться функцией Ляпунова?
10. Как формулируется теорема В.–М. Попова для систем с неустойчивой
линейной частью?
Варианты задания
Таблица 17.1
№
1
x 1 sin x1
x 2 sin x 2
2
x 1 x1 x 32
x 2 x 2 x13
3
x 1 (2 x1 2 x 2 ) x1
x 2 (2 2 x1 x 2 ) x 2
4
x 1 x1 (2 x1 )
x 2 x 2 (4 x1 )
5
x 1 x1 (1 x1 )
x 2 sin x 2
6
x 1 2 x1 x12
x 2 x 2 x1x 2
88
Таблица 17.2
1
W ( p)
1
( p 1)( p 2)( p 5)
2
W ( p)
1
( p 1)( p 4)( p 5)
3
W ( p)
1
( p 1)( p 2)( p 6)
4
W ( p)
1
( p 2)( p 2)( p 4)
5
W ( p)
1
( p 1)( p 3)( p 5)
Таблица 17.3
1
3
x1 x1 x1 x2 x1;
3
x2 x2 x1 x2 x2
2
3
x1 x1 x1 x2 x1;
3
x2 x2 x1 x2 x2
3
x1 x2 ;
4
3
x1 x2 ; x2 x2 x1
5
3
x1 x1 x1 x2 x1 ;
3
x2 x2 x2 x1
3
x 2 x2 x1 x2 x2
89
Лабораторная работа №18
Моделирование элементов дискретных систем
автоматического управления
Дискретные системы отличаются от непрерывных тем, что среди
сигналов, действующих в системе имеются
дискретные сигналы.
Дискретные сигналы образуются из непрерывных квантованием по уровню
или по времени, или одновременно по уровню и по времени.
б ) f (nh)
a) f (t )
в) f (nh)
t
0 h 2h 3h 4h
t
t
0 h 2h 3h 4h
0
h 2h 3h 4h
Рис.18.1. Дискретные представления непрерывного сигнала.
Дискретным представлением непрерывного сигнала f(t) (рис. 18.1.а),
квантованного по времени с постоянным шагом квантования h, является
решетчатая функция f *(t) (рис. 18.1.б), определяемая выражением:
f * ( t ) f ( t ) ( t nh ) f ( nh ) ( t nh ) .
n0
(18.1)
n0
Элемент, преобразующий входной непрерывный сигнал f(t) в сигнал
вида решетчатой функции f *(t), называют идеальным импульсным
элементом или идеальным квантователем. Идеальный квантователь
выполняет операцию модуляции непрерывного сигнала f(t) периодическим
сигналом, состоящим из идеальных импульсов (t–nh), n=0, 1, 2
Реальный квантователь так же выполняет операцию модуляции
несущего сигнала, однако вместо идеальных импульсов выступают
90
различные их приближения. Часто применяемый при моделировании
дискретных
использует
систем
амплитудно–импульсный
периодический
сигнал,
состоящий
модулятор
из
(АИМ)
прямоугольных
импульсов п(t) единичной высоты и малой длительности Т
п (t ) 1(t ) 1(t T ) , T<<h.
(18.2)
Непрерывный сигнал f (t) преобразуется амплитудно-импульсным
модулятором в сигнал (рис. 18.1, в)
f п* ( t
Для
восстановления
) f ( nh )п ( t nh ) .
(18.3)
n0
непрерывного
сигнала
из
дискретного
используют фиксатор – элемент, осуществляющий кусочно-линейную
экстраполяцию между импульсами дискретного сигнала. Восстановление
непрерывного сигнала в цифровых системах, содержащих АЦП и ЦАП,
происходит по схеме «выборка-хранение», что соответствует наличию в
системе фиксатора нулевого порядка. Передаточная функция фиксатора
нулевого порядка
hp
Wф ( p ) 1 e
p
(18.4)
может быть найдена как преобразование Лапласа от импульсной
характеристики kф(t) этого элемента.
Цель работы
Изучение
методов
моделирования
восстановления непрерывных сигналов.
91
процессов
квантования
и
Литература
1. [4] стр. 69-93;
2. [5] стр. 93-103;
3. [2] стр. 294-307.
Порядок выполнения работы
1. Получить передаточную функцию фиксатора нулевого порядка с
учетом малой длительности импульсов АИМ T 0 .
2. Используя программные средства моделирующего пакета, собрать
схему последовательного соединения АИМ и фиксатора нулевого
порядка.
3. Задать параметры АИМ и фиксатора из соображений величины шага
квантования по времени h=0,1с и длительности импульсов p=0,01с.
4. Подать на вход системы:
а) ступенчатое 1(t ) ;
б) линейно растущее t1(t);
в) гармоническое sin t 1(t)
воздействия. Наблюдать за выходами АИМ и фиксатора нулевого
порядка. Графики процессов квантования и восстановления зарисовать
в отчет.
5. Сформировать сигнал ошибки восстановления непрерывного линейно
растущего воздействия t1(t). Наблюдать за ошибкой при величине
шага
квантования:
а)
h=0,1с;
б)
h=0,3с.
График
ошибок
восстановления зарисовать в отчет.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 2 с; шаг моделирования 0,001с.
92
Содержательная часть отчета должна включать подробные схемы
моделирования; графики квантования и восстановления сигналов; графики
ошибок восстановления.
Контрольные вопросы
1. Какие примеры дискретных систем вам знакомы?
2. Какие виды квантования сигналов вам известны?
3. Как математически описать квантованный сигнал?
4. Что такое решетчатая функция? Каковы свойства преобразования
Лапласа от решетчатой функции?
5. Какова связь решетчатой функции с Z–преобразованием?
6. Чем определяется величина квантования по уровню?
7. Что такое фиксатор n-го порядка? Какой вид имеет математическая
модель фиксатора нулевого порядка?
8. Чем определяется точность восстановления непрерывного сигнала?
9. Каков идеальный элемент восстанавливающий непрерывный сигнал?
10. Что понимают под оператором сдвига? Как моделируют воздействие
оператора сдвига?
93
Лабораторная работа №19
Моделирование дискретных аналогов
непрерывных типовых звеньев
Поведение любого дискретного элемента системы описывается
разностным уравнением
a0 y(k n) a1 y(k n 1) an y(k )
(19.1)
b0 x(k m) b1 x(k m 1) bm x(k )
где x(k) – входной дискретный сигнал;
y(k) – выходной дискретный сигнал.
Это разностное уравнение представляет собой внешнюю модель
дискретного элемента или модель типа «вход–выход».
Для упрощения аналитической работы с разностными моделями
дискретных элементов введено понятие оператора сдвига. Оператор R
сдвига вперед определяется соотношением
R f (k ) f (k 1) .
(19.2)
Инверсией оператора сдвига вперед является оператор R-1 сдвига назад:
R1 f (k ) f (k 1) .
(19.3)
Оператор сдвига вперед является дискретным аналогом непрерывного
оператора
D d dt
дифференцирования
Коши.
По
аналогии
с
использованием оператора D для получения операторной передаточной
функции непрерывной системы, для дискретных систем используют
оператор R, получая представление модели «вход–выход» в виде
дискретной операторной передаточной функции W(R).
y ( k ) W ( R) x( k ) .
94
(19.4)
Вид дискретной операторной передаточной функции зависит от
выбранного
алгоритма
дискретизации.
Различие
вычислительных
алгоритмов
обусловлено
применением
различных
геометрических
интерпретаций производной и первообразной в методах численного
интегрирования и дифференцирования. Дискретизация на основе метода
численного интегрирования основана на замене операции интегрирования
суммированием. Графическая интерпретация метода представлена на
рис.19.1,а.
a)
xk 1
б)
xkh
xkh
xk
xk
xk 1
xk 1
(k 1)h kh (k 1)h
(k 1)h kh
Рис.19.1. Дискретное интегрирование и дифференцирование.
Метод прямых разностей или метод Эйлера основан на разностном
уравнении, связывающем входной и выходной сигналы дискретной модели
интегратора
yk yk 1 h xk 1 .
(19.5)
Применяя оператор обратного сдвига R-1, получим
(1 R 1 ) yk hR1 xk .
Дискретная передаточная функция интегратора имеет вид
h R 1
W ( R)
.
1 R 1
(19.6)
Для метода прямоугольников с упреждением, или метода обратных
разностей уравнение имеет вид
95
yk 1 yk hxk 1 .
(19.7)
Применяя оператор обратного сдвига R-1, получим дискретную
передаточную функцию интегратора с упреждением
W ( R)
h
.
1 R 1
(19.8)
Модель дискретного дифференциатора методом прямых разностей
можно получить, используя разностное уравнение
yk ( xk 1 xk )h .
Графическая
интерпретация
дискретного
дифференцирования
представлена на рис.19.1,б. Применяя к уравнению оператор прямого
сдвига R, получим
1
yk ( R 1) xk .
h
(19.9)
Передаточная функция дискретного дифференциатора имеет вид
W ( R)
R 1
,
h
или, переходя к оператору обратной разности R 1
1 R 1
.
W ( R)
hR1
(19.10)
Для метода прямоугольников с упреждением, или метода обратных
разностей, разностное уравнение дискретного дифференциатора имеет вид
yk ( xk xk 1 )h .
(19.11)
Применяя оператор обратного сдвига R-1, получим дискретную
передаточную функцию дифференциатора с упреждением
1 R 1
.
W ( R)
h
96
(19.12)
Для
моделирования
соответствующей
дискретной
системы
непрерывно–дискретной
применяют
импульсной
модель
системы.
Соответствие заключается в замене оператора R-1 сдвига назад звеном
запаздывания
с
передаточной
функцией
W(p) = e-hp.
Импульсная
модуляция входного сигнала осуществляется АИМ, восстановление
выходного сигнала – фиксатором нулевого порядка.
Цель работы
Изучение методов дискретизации элементов аналоговых систем и
методов моделирования дискретных систем.
Литература
1. [4] стр. 69-93;
2. [5] стр. 93-103;
3. [2] стр. 294-307.
Порядок выполнения работы
1. Для
обоих
алгоритмов
численного
интегрирования
записать
дискретную передаточную функцию интегрирующего звена Wи(R) и
соответствующее
разностное
уравнение.
Рассчитать
параметры
структуры импульсной модели интегратора по данным величины шага
квантования по времени h=0,1с и длительности импульсов АИМ
T=0,01с.
2. Собрать структурную схему импульсной модели интегратора. В
качестве
оператора
обратного
сдвига
R-1
использовать
звено
импульсной задержки W(p) = e-hp . В приложении Simulink это звено
реализуется блоком Transport Delay, в качестве параметров которого
задается время задержки, равное в лабораторной работе шагу
квантования h=0.1c. Подать на вход системы ступенчатый сигнал 1(t) и
гармонический сигнал sin t 1(t), предварительно дискретизировав их
97
с помощью АИМ. В приложении Simulink это звено реализуется
блоком Discrete Pulse Generator. Выходной сигнал дискретного
интегратора подать на фиксатор нулевого порядка. Наблюдать и
зарисовать в отчет дискретизированный входной сигнал и выходные
сигналы
интегратора
с
фиксатором
и
без
него.
Схема
для
моделирования в приложении Simulink приведена на рис.19.2.
3. Для обоих алгоритмов численного дифференцирования записать
дискретную
передаточную
функцию
Wд(R)
и
соответствующее
разностное уравнение. Рассчитать параметры структуры импульсной
модели дифференциатора по данным величины шага квантования по
времени h=0,1с и длительности импульсов АИМ p=0,01с.
Mux
x(t)
Xk
Discrete Pulse
Generator
Product
Yk
INTEGRATOR
Yk
Scope5
Y(t)
EKSTRAPOL1
Mux
Рис.19.2. Схема для выполнения лабораторной работы в приложении Simulink.
4. Собрать
схему
импульсной
модели
алгоритма
численного
дифференцирования. Подать на вход системы
а) ступенчатый сигнал 1(t);
б) линейно растущий t1(t);
в) гармонический sin t 1(t) сигналы. Наблюдать и зарисовать в отчет
входной и выходной сигналы системы.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 1 с; шаг моделирования 0,01 с.
98
Содержательная часть отчета должна включать подробные схемы
моделирования
дискретных
интеграторов
и
дифференциаторов,
реализованных методами прямых и обратных разностей; графики
выходных сигналов этих устройств при различных входных воздействий.
Для наибольшей наглядности на одном рисунке следует приводить график
входного и выходного сигналов.
Контрольные вопросы
1. Почему
применяют
алгоритмы
численного
интегрирования
и
дифференцирования?
2. Какие
геометрические
прямоугольников
и
интерпретации
трапеций?
Как
используют
эти
методы
в
методах
связаны
с
вычислительными алгоритмами?
3. Что определяет точность и сходимость численного метода?
4. Как строится рекуррентная разностная модель дискретной системы?
5. Как получают дискретную операторную функцию системы W(R)?
6. Как получить внутреннюю матричную модель дискретной системы?
7. Что
такое
импульсная
модель
дискретной
системы?
Каковы
особенности структуры дискретной импульсной системы?
8. Как,
используя
Z-преобразование
вводят
понятие
дискретной
передаточной функции W(z)?
9. Что такое модуляционная внешняя модель дискретной системы? Какие
дискретные
передаточные
функции
соответствуют
типовым
структурам внешней модели с непрерывной частью?
10. Верно ли, что непрерывная система может быть неоднозначно
дискретизирована различными методами? В чем различие этих
методов и какой метод является более точным?
99
Лабораторная работа №20
Изучение методов дискретной аппроксимации
непрерывных звеньев
В структуре современных систем управления в качестве регуляторов
применяются
различные
цифровые
устройства,
микропроцессорные
контроллеры, ЭВМ. Наличие в системе цифровых регуляторов делает
систему дискретной, поскольку цифровой код – есть сигнал, квантованный
одновременно по времени и по уровню. Большинство объектов управления
и исполнительных устройств автоматики являются аналоговыми. Для
объединения аналоговых и цифровых блоков в единую структуру системы
управления следует описать непрерывный объект его дискретной
аппроксимацией, что позволяет характеризовать состояние непрерывного
процесса в объекте, только в дискретные моменты времени.
a)
ИК
ИК
W(p)
Y(z)
h
h
W(z)
б)
ИК
ИК
W(p)
ЭПО
U(z)
h
Y(z)
h
W(z)
Рис.20.1.Структурные схемы дискретных систем.
Дискретная аппроксимация непрерывной части системы может быть
выполнена с использованием Z–преобразования или алгебраического
метода дискретизации. В первом случае различают две типовых схемы
включения непрерывной части.
100
На рис. 20.1.а представлена схема включения непрерывного объекта
с передаточной функцией W(p) и идеальными квантователями на входе и
выходе. Идеальные квантователи работают синхронно и синфазно с шагом
h, порождая решетчатые функции входного u*(t) и выходного y*(t)
сигналов. Изображения, в смысле Z–преобразования, входного U(z) и
выходного Y(z) сигналов связаны соотношением
Y ( z ) W ( z )U ( z ) ,
(20.1)
где W(z) – дискретная передаточная функция, которая является внешней
модуляционной моделью дискретной системы, может быть вычислена в
виде
W ( z) Z
Передаточная
функция
L
1
W ( p) Z
дискретной
k (t ) .
системы
(20.2)
совпадает
с
Z–преобразованием импульсной характеристики непрерывной части
системы.
На рис. 20.1. б представлена иная схема включения непрерывного
объекта с передаточной функцией W(p). Перед непрерывной частью стоит
идеальный квантователь с шагом h и экстраполятор (фиксатор) нулевого
порядка, после непрерывной части – идеальный квантователь. Такая схема
включения описывается внешней модуляционной моделью
W ( z)
z 1 1 W ( p) z 1
Z L p z Z h(t ) .
z
(20.3)
Передаточная функция дискретной системы совпадает с точностью до
сомножителя
с
Z–преобразованием
переходной
характеристики
непрерывной части системы.
Передаточная функция W(z) может быть так же получена путем
последовательного перехода от W(p) к внутренней непрерывной модели
101
x (t) Ax(t) Bu(t), x (0)
y(t) Cx(t),
с последующей аналитической дискретизацией этой модели
x (k 1) Mx(k ) Nu(k ), x(0)
y (k ) Cx(k ).
Для алгебраической дискретизации непрерывной части системы
достаточно заменить переменную p в выражении передаточной функции
W(p) на оператор дифференцирования, выбранного конечно разностного
алгоритма. Для метода прямых разностей такая подстановка p
метода обратных разностей p
z 1
, для
h
z 1
2 z 1
, для алгоритма Тустена p
.
h z 1
hz
Алгоритм Тустена гарантирует устойчивость дискретной модели,
если порождающая непрерывная
система была устойчива. Алгоритмы
Эйлера и обратной разности не обладают таким свойством.
Цель работы
Изучение методов дискретной аппроксимации непрерывной части
цифровой системы управления.
Литература
1. [4] стр. 69-93;
2. [5] стр. 93-103;
3. [2] стр. 294-307.
Порядок выполнения работы
1. Получить дискретную передаточную функцию W(z) инерционного
звена, включенного по схеме с идеальным квантователем на входе.
Параметры передаточной функции W(p; k, T) инерционного звена
задаются преподавателем.
102
2. Собрать схему, состоящую из последовательного соединения АИМ
(схему реализации АМИ в моделирующем пакете см. в лабораторной
работе №19), масштабирующего
коэффициента и непрерывной
передаточной функции W(p). Параметры структуры задать по данным
величины шага квантования по времени h = 0,1с и длительности
импульсов
АИМ
Т=0,01c.
Собрать
схему
последовательного
соединения типового блока АЦП, блока цифровой передаточной
функции W(z) и блока ЦАП. Блоки ЦАП и АЦП в моделирующем
пакете реализуются блоком Zero-Order Hold, в качестве параметров
которого задается величина шага квантования h=0,1с. Объединить
входы схем. Схема выполнения первой части лабораторной работы
приведена на рис.20.2.
0.34z
z-0.819
Zero-Order
Hold6
Mux
Mux4
W ( p)
x ( t )1
10
Discrete Pulse
Generator2
Zero-Order
Hold7
W(z)
AIM
Scope4
2
0.5s+1
Gain1
AIM
Discrete Pulse
Generator3
Рис.20.2. Схема для выполнения первой части лабораторной работы в
приложении Simulink.
3. Подать на объединенный вход схем ступенчатый сигнал 1(t).
Наблюдать и зарисовать в отчет переходный процесс на выходах
блоков непрерывной и цифровой передаточных функций.
4. Получить дискретную передаточную функцию W(z) инерционного
звена, включенного по схеме с фиксатором на входе.
5. Собрать схему, состоящую из последовательного соединения пары
блоков АЦП – ЦАП и непрерывной передаточной функции W(p).
Собрать схему последовательного соединения типового блока АЦП,
103
блока цифровой передаточной функции G(z) и блока ЦАП. Объединить
входы схем.
6. Подать на объединенный вход ступенчатый сигнал 1(t). Наблюдать и
зарисовать в отчет выходные сигналы блоков непрерывной и цифровой
передаточных
функций.
Схема для
выполнения
второй
части
лабораторной работы приведена на рис.20.3.
0.362
z-0.819
Zero-Order
Hold6
W(z)
Zero-Order
Hold7
Mux4
W ( p)
x ( t )1
Mux
Scope4
2
0.5s+1
Discrete Pulse
Generator2
AIM
Zero-Order
Hold8
Zero-Order
Hold9
Рис.20.3. Схема для выполнения второй части лабораторной работы в
приложении Simulink.
7. Для инерционного звена получить внутреннюю непрерывную модель и
аналитически дискретизировать ее. Для полученной дискретной
модели найти передаточную функцию W(z). Сравнить с результатом
п. 4. Подать на объединенный вход непрерывной передаточной
функции W(p) и дискретной передаточной функции W(z) ступенчатый
сигнал 1(t). Наблюдать и зарисовать в отчет выходные сигналы блоков
непрерывной и цифровой передаточных функций.
8. Получить дискретную передаточную функцию W(z) инерционного
звена тремя приближенными численными методами (методом прямых
разностей, методом обратных разностей, методом Тустена). Подать на
объединенный вход непрерывной передаточной функции W(p) и
дискретной передаточной функции W(z) ступенчатый сигнал 1(t).
Наблюдать
и
зарисовать
в
отчет
104
выходные
сигналы
блоков
непрерывной
и
цифровой
передаточных
функций.
Схема
для
выполнения третьей части лабораторной работы приведена на рис.20.4.
2
0.5s+1
Transfer Fcn
Step
Mux
Mux
Scope
0.362
z-0.819
Discrete
Transfer Fcn
Рис.20.4. Схема для выполнения третьей части лабораторной работы в
приложении Simulink.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 4Т с, где T – постоянная времени
инерционного звена.; шаг моделирования 0,01 с.
Содержательная часть отчета по каждой части работы должна
включать: получение дискретных моделей инерционного звена заданным
способом; схему моделирования; полученные переходные процессы для
непрерывной системы управления и ее дискретного представления. Для
наибольшей наглядности на одном рисунке следует приводить графики
выходных сигналов аналоговой и дискретной модели.
Контрольные вопросы
1. Чем в реальной цифровой системе автоматического управления
определяются величины шага квантования по времени и по уровню?
2. Для чего используют дискретную модель непрерывной части цифровой
системы управления?
3. Почему различают две разновидности внешней модуляционной модели
дискретной системы?
4. Какие методы дискретной аппроксимации непрерывной части системы
управления вам знакомы?
105
5. Каким образом применяют алгебраические методы дискретизации
непрерывной части системы?
6. В каком случае возможно применение аналоговой аппроксимации
цифровой части системы?
7. Как
выглядит
графическое
представление
характеристики
«вход–выход» квантователя по уровню?
8. Какие алгоритмы дискретной аппроксимации гарантируют, что модель
непрерывной устойчивой системы будет так же устойчива? С чем это
связано?
9. Как связаны спектры полюсов и нулей непрерывной системы и ее
дискретной модели?
10. Какие
свойства
Z–преобразования
часто
используются
дискретизации моделей?
Варианты задания
№
варианта
1
2
3
4
5
6
k
T
2,5
1
3
5
4
1,5
0,8
0,9
0,75
0,55
1,0
0,5
№
варианта
7
8
9
10
11
12
106
k
T
3,5
2
1,5
2,5
1
4,5
0,6
0,7
0,65
1,1
0,85
0,8
при
Лабораторная работа №21
Исследование динамических свойств замкнутой
цифровой системы управления
Для
линейных
дискретных
систем
понятия
устойчивости,
асимптотической устойчивости и неустойчивости вводятся аналогично
тому как это вводилось для непрерывных линейных систем. Устойчивость
линейной дискретной системы полностью определяется ее собственными
числами – корнями характеристического уравнения системы. При этом
характеристическое уравнение может быть определено как по внутренней
модели состояния
A( ) det(E M ) ,
(21.1)
где M – матрица состояния внутренней модели, так и по внешней модели
«вход – выход» системы
W( z )
B( z )
,
A( z )
(21.2)
A( z )|z a0 n a1n1 an1 an 0,
где W(z) – дискретная передаточная функция системы.
Для устойчивости линейной дискретной системы необходимо и
достаточно, чтобы ее собственные числа располагались внутри или на
границе единичного круга, а для асимптотической устойчивости – внутри
единичного круга.
Для анализа устойчивости дискретной системы без определения ее
собственных чисел применяют алгебраические (Рауса–Гурвица, Джури) и
частотные (Найквиста, псевдочастотные) критерии. При использовании
критерия Рауса–Гурвица осуществляют билинейное преобразование
w z 1 ,
z 1
107
(21.3)
которое отображает все внутренние точки единичного круга во все точки
левой
полуплоскости.
Следствием
билинейного
преобразования
в
частотной области является понятие псевдочастоты
W ( j w ) W ( z )|
1 j w
z
1 j w
, w tg
h
,
2
(21.4)
где W(z) – дискретная передаточная функция прямого тракта замкнутой
системы; h – период квантования по времени;, w – частота и
псевдочастота соответственно.
При анализе устойчивости замкнутой системы иногда прибегают к
построению
траектории
корней
на
комплексной
z–плоскости
в
зависимости от изменения некоторого параметра , что позволяет судить
не только о факте устойчивости, но и о показателях качества управления.
В том случае, если все полюса линейной дискретной системы
порядка n оказываются в начале координат, то свободное движение
системы сходится не более чем за n шагов. Такие дискретные системы
называют системами с апериодической реакцией или системами с конечной
длительностью переходного процесса. Сходимость переходного процесса
за ограниченное время характерная особенность дискретных систем,
линейная непрерывная система таким свойством обладать не может.
В замкнутых цифровых системах управления факт квантования
сигнала по уровню может оказать сильное влияние на динамические
свойства системы и показатели качества управления. Для анализа этого
влияния применяют модели АЦП и ЦАП с учетом нелинейной
характеристики «вход–выход» этих элементов. Полученная модель
замкнутой системы оказывается существенно нелинейной и может быть
исследована на наличие автоколебаний или потерю устойчивости
движений.
108
Цель работы
Изучение методов анализа устойчивости замкнутой цифровой
системы и расчета цифровой системы с конечной длительностью
переходных процессов. Исследование влияния величины шага квантования
по уровню на динамические свойства системы.
Литература
1. [4] стр. 205-225;
2. [5] стр. 103-110;
3. [2] стр. 346-357.
Порядок выполнения работы
1. Получить дискретную передаточную функцию G(z) инерционного
звена, включенного по схеме с идеальным квантователем и фиксатором
на входе. Параметры передаточной функции W(p; k, T) инерционного
звена задаются преподавателем.
2. Получить дискретную передаточную функцию H(z) замкнутой по
выходу цифровой системы с передаточной функцией прямого тракта
G(z).
3. Построить
корневой
годограф
системы.
Рассчитать
значение
коэффициента усиления прямого тракта замкнутой системы kопт, при
котором в системе должны наблюдаться переходные процессы с
конечным временем установления.
4. Рассчитать значение предельного коэффициента усиления kпред, при
котором замкнутая дискретная система оказывается на границе
устойчивости.
5. Собрать схему замкнутой цифровой системы, прямой тракт которой
содержит последовательное соединение пары блоков АЦП – ЦАП,
непрерывной передаточной функции W(p) и выходной пары блоков
109
АЦП – ЦАП,
а
обратный
тракт
обеспечивает
отрицательную
единичную обратную связь по выходу системы. Параметры пар блоков
АЦП – ЦАП задать по данным величин шага квантования по времени
h=0,1с. Схема для выполнения лабораторной работы приведена на
рис.21.1.
Step
Sum
Gain
Mux
1
K
Scope
Ts+1
Zero-Order
Hold
Mux
Zero-Order
Hold1
Transfer Fcn
Рис.21.1. Схема для выполнения лабораторной работы в приложении Simulink.
6. Задав значение коэффициента усиления прямого тракта:
а) k;
б) kопт;
в) kпред;
г) 0,8kпред;
д) 1,1kпред,
подать на вход схемы ступенчатый сигнал 1(t). Наблюдать и зарисовать в
отчет выходной сигнал блока непрерывной передаточной функции и его
цифровое представление с выхода АЦП.
Для моделирования выбрать метод симуляции с фиксированным
шагом, время моделирования принять 2 с; шаг моделирования 0,01 с.
Содержательная часть отчета должна включать: расчет дискретной
передаточной функции
инерционного
звена
W(z)
согласно
(20.3);
передаточную функцию замкнутой дискретной системы H(z); корневой
годограф замкнутой дискретной системы; расчет значений предельного
kпреди оптимального kопт коэффициента передачи замкнутой дискретной
системы;
схему
моделирования;
переходные процессы
дискретной
системы при различных значениях коэффициента передачи.
Контрольные вопросы
1. Как связаны устойчивость непрерывной системы и ее дискретной
аппроксимации?
110
2. Какие критерии применяют при анализе устойчивости дискретных
систем?
3. Для чего применяют билинейное преобразование?
4. Как
сформулирован
аналог
частотного
критерия
устойчивости
Найквиста для дискретных систем?
5. Что такое предельный коэффициент усиления цифровой системы
управления?
6. Какова математическая модель замкнутой системы управления с
непрерывным объектом и цифровым регулятором?
7. В каком случае для анализа устойчивости прибегают к аналоговой
аппроксимации цифровой части системы?
8. Как
доказать
существование дискретной
системы
с
конечной
длительностью переходного процесса?
9. Каково условие апериодической реакции для замкнутой дискретной
системы? Какой вид в этом случае принимает характеристическое
уравнение замкнутой системы?
10. Как дискретизация по уровню влияет на динамические свойства
замкнутой цифровой системы?
Варианты задания
№ варианта
1
2
3
4
5
6
W( p; k , T)
k
1,75
2
2,25
2,5
2,75
3
k
Tp 1
№ варианта
T
0,4
0,45
0,5
0,55
0,6
0,65
7
8
9
10
11
12
111
W( p; k , T)
k
3,25
3,5
3,75
4
4,25
4,5
k
Tp 1
T
0,7
0,75
0,8
0,85
0,9
0,95
Лабораторная работа №22
Синтез замкнутой системы управления
с цифровым регулятором
В современных системах управления непрерывными процессами в
качестве регуляторов часто применяют различные микропроцессорные
устройства. Это связано с целым рядом существенных преимуществ
микропроцессорной техники перед аналоговой. Задача синтеза замкнутой
системы с цифровым регулятором и непрерывным объектом может быть
решена несколькими путями.
На рис. 22.1,а представлена структурная схема замкнутой системы с
непрерывным регулятором Wp(p) и объектом Wo(p). Задачу синтеза такой
системы решают любым из известных для непрерывных систем методов, а
затем с учетом характеристик микропроцессорного контроллера получают
дискретную передаточную функцию регулятора Wp(z). Структурная схема
полученной цифровой системы управления представлена на рис. 22.1, б.
a)
u(t)
Wр(p)
y(t)
Wоу(p)
б)
МПК
y(t)
h
АЦП
Wр(z)
Wоу(p)
ЭПО
h
ЦАП
в)
u(t)
y(t)
Wр(z)
Wоу(z)
Рис.22.1. Цифровые системы управления.
112
Систему управления с микропроцессорным контроллером в прямом
тракте можно рассмотреть и как полностью цифровую (рис. 22.1, в), т.е. с
дискретным входом и выходом. В этом случае получают дискретную
аппроксимацию объекта управления Wo(z), а вычислительный алгоритм
регулятора Wp(z) подбирают по заданным показателям качества замкнутой
цифровой системы. Это позволяет добиваться лучшего по сравнению с
цифровыми
квазианалоговыми
регуляторами
качества
переходных
процессов в системе.
При
синтезе
систем
с
цифровым
регулятором
чаще
всего
используются универсальные цифровые ПИД–регуляторы, реализующие
одновременно пропорциональный, интегральный и дифференциальный
законы
регулирования.
получают,
используя
Дискретное
разностные
представление
алгоритмы
ПИД–регулятора
для
аппроксимации
интегральной и дифференциальной составляющих закона управления.
Обработка значений сигнала рассогласования в микропроцессорном
контроллере происходит программно. По рекуррентному уравнению
значение управления на текущем шаге вычисляется через значения
управления и рассогласования на предыдущих шагах.
Для настройки цифрового ПИД–регулятора используют корневые,
частотные методы или критерий апериодической реакции.
Цель работы
Изучение методов настройки цифровых регуляторов для достижения
заданного качества управления. Моделирование замкнутой системы
управления с цифровым регулятором и непрерывным объектом.
Литература
1. [4] стр. 313-335;
2. [5] стр. 110-119;
3. [2] стр. 375-385.
113
Порядок выполнения работы
1. По
условиям критерия
МО получить настроечные параметры
непрерывного ПИ–регулятора Wp(p; Tиз, Tи) для применения его в
замкнутой системе с объектом Wo(p). Вид и параметры передаточной
функции непрерывного объекта управления Wo(p; k, T1, T2) задаются
преподавателем.
2. Получить дискретное представление ПИ–регулятора Wp(z), выполнив
аппроксимацию
интегральной
составляющей
его
передаточной
функции Wp(p) по алгоритму обратной разности. Получить дискретную
передаточную функцию Wo(z) объекта управления, включенного по
схеме с идеальным квантователем и фиксатором на входе.
3. Собрать схему замкнутой системы, прямой тракт которой содержит
последовательное соединение непрерывного ПИ–регулятора Wp(p),
который реализуется в моделирующем пакете блоком PID-Controller и
непрерывного объекта Wo(p), задаваемого передаточной функцией
Transfer
Fcn,
единичную
а
обратный
обратную
связь
тракт
по
обеспечивает
выходу
отрицательную
системы.
Схема
для
моделирования этой части работы приведена на рис.22.2.
PID
Sum
PID Controller
K
1
T1.s+1
T2.s+1
Transfer Fcn
Transfer Fcn1
Рис.22.2. Схема для моделирования непрерывной системы.
4. Собрать схему замкнутой системы с цифровым регулятором, прямой
тракт которой содержит последовательное соединение типового блока
АЦП, цифрового ПИ–регулятора Wp(z), реализуемого дискретной
передаточной функцией Discrete Transfer Fcn, блока ЦАП и
непрерывного объекта Wo(p), реализуемого непрерывной передаточной
114
функцией Transfer Fcn, а обратный тракт обеспечивает отрицательную
единичную обратную связь по выходу системы. Блоки ЦАП и АЦП
реализуются элементами Zero-Order Hold, параметрами этих блоков
является
шаг
квантования
по
времени
Схема
h=0,1с.
для
моделирования этой части работы приведена на рис.22.3.
Sum1
Zero-Order
Hold
1
K
1
z+0.5
T1.s+1
T2.s+1
W ( p)
Transfer Fcn
Zero-Order
Hold1
W(Z)
Рис.22.3. Схема для моделирования системы с цифровым регулятором и
аналоговым объектом.
5. Собрать схему замкнутой цифровой системы, прямой тракт которой
содержит
последовательное
соединение
типового
блока
АЦП,
цифрового ПИ–регулятора Wp(z), дискретного объекта Wo(z) и блока
ЦАП, а обратный тракт обеспечивает отрицательную единичную
обратную связь по выходу системы. Параметры блоков АЦП и ЦАП
задать из соображений величин шага квантования по времени h=0,01.
Схема для моделирования этой части работы приведена на рис.22.4.
W p (Z)
Sum2
W oy ( Z )
1
1
z+0.5
z+0.5
Zero-Order
Hold
Zero-Order
Hold1
Рис.22.4. схема для моделирования цифровой системы.
6. Объединить
входы
схем,
полученных
в
п.п. 3–5.
Подать
на
объединенный вход схем ступенчатый сигнал 1(t). При помощи блоков
Scope наблюдать и зарисовать в отчет переходной процесс в
115
непрерывной системе, системе с цифровым регулятором, в полностью
цифровой системе.
7. По характеристическим числам косвенно оценить показатели качества
управления замкнутой цифровой системы. Оценить установившуюся
ошибку
отработки
замкнутой
цифровой
системой
единичного
ступенчатого воздействия. Сравнить с результатами моделирования в
п. 6.
Для моделирования выбрать метод симуляции с фиксированным
шагом. Время интегрирования в лабораторной работе принять не менее
10min(T1, T2) с, где T1, T2 – постоянные времени объекта управления; шаг
моделирования – 0,01 с.
Содержательная часть отчета по каждой части работы должна
включать: схему моделирования; настройку ПИ-регулятора, дискретную
передаточную функцию цифрового регулятора; переходные процессы в
замкнутой цифровой системе управления; оценку качества переходных
процессов; график сигнала ошибки в замкнутой цифровой системе
управления.
Контрольные вопросы
1. Какие методы синтеза замкнутой цифровой системы используют
модели «вход–выход» дискретной системы?
2. Какие методы синтеза известны для моделей состояния линейных
дискретных систем?
3. По какому критерию синтезируют оптимальные по быстродействию
цифровые системы?
4. Как оценить качество управления по местоположению полюсов
цифровой системы? Как получить аналогичные оценки по частотным
характеристикам?
116
5. Для чего применяют изображения в смысле Z–преобразования типовых
сигналов (hn), =0, 1, ... ?
6. Как по виду дискретной передаточной функции определить порядок
астатизма цифровой системы?
7. Какое влияние на качество управления в замкнутой системе оказывает
замена непрерывного регулятора на цифровой?
8. Какие характеристики микропроцессорного устройства определяют
величину квантования по времени и уровню в реальной цифровой
системе управления?
9. Как оценить влияние факта квантования сигналов по уровню на
показатели качества переходного процесса и установившегося режима
цифровой системы?
10. В чем заключается удобство программной реализации универсальных
ПИД–регуляторов на базе микропроцессорных контроллеров?
Варианты задания
№
Wo ( p)
варианта
k
(T1p 1)(T2 p 1)
k
T1
T2
1
2
0,65
0,12
2
3,5
0,7
3
0,75
4
№
Wo ( p)
варианта
k
(T1p 1)(T2 p 1)
k
T1
T2
7
1
0,75
0,25
0,15
8
4
0,7
0,22
0,9
0,08
9
1,5
0,9
0,07
1,2
1,0
0,1
10
0,5
0,95
0,05
5
3,7
0,8
0,15
11
0,7
0,85
0,09
6
4
0,55
0,25
12
3
0,95
0,1
117
Список рекомендуемой литературы
1. «Теория
систем
автоматического
регулирования»,
В. А. Бесекерский, Е. Попов, М., Наука, 1972.
2. «Теория
автоматического
управления»
под
редакцией
под
редакцией
Нетушила А. В., часть I, М., Высшая школа, 1976.
3. «Теория
автоматического
управления»
Нетушила А. В., часть II, М., Высшая школа, 1976.
4. «Теория управления». Учебное пособие для студентов вузов.
Л. Д. Певзнер, М., МГГУ, 2001.
5. Практикум по теории автоматического управления, Л. Д. Певзнер,
М., МГИ, 1991.
6. Методические указания к выполнению курсовой работы по курсу
«Теория управления», Р. А. Нейдорф, Ростов–на–Дону, ДГТУ, 1995.
7. «Теория автоматического регулирования», В.А. Лукас, М., Недра,
1990.
8. Лабораторный практикум по теории автоматического управления,
Л. Д. Певзнер, М. С. Ломакин, М., МГГУ, 1993.
118