Интервал дискретизации
реклама

Дискретизация
Непрерывный сигнал x(t) можно преобразовать в дискретную форму при
совместном применении операций дискретизации и квантования (рис.1).
Дискретизация
Дискретизацией называется замена непрерывной функции x(t) ее
мгновенными значениями x(ti) в дискретные моменты времени ti (i=1,2,3,...).
Дискретизация может быть равномерной, если шаг дискретизации ΔT=ti-ti1=const, и неравномерной. Неравномерная дискретизация бывает адаптивной
или программной. При адаптивной дискретизации шаг ΔTi выбирают в
зависимости от характера изменения сигнала в рассматриваемый промежуток
времени, а программная дискретизация проводится по заранее
установленной программе работы. Неравномерная дискретизация может
проводиться с кратными интервалами ΔTi=с·Δt, где с=1,2,3,..., а Δt=const, или
с некратными ΔTmin ≤ ΔTi ≤ ΔTmax.
Исходную функцию x(t) можно восстановить по ее дискретным значениям
x(ti). Воспроизводящую функцию z(t) можно представить в виде:
где коэффициенты bk зависят от отсчетов x(tk). Воспроизводящая функция
восстанавливает исходную с некоторой погрешностью и для возможности
восстановления z(t) с заданной погрешностью важен выбор числа точек
дискретизации. Чем меньше шаг дискретизации ΔT, тем точность
представления выше, однако при этом появляется избыточность. Выбор шага
дискретизации осуществляется на основе априорных сведений о
характеристиках сигнала.
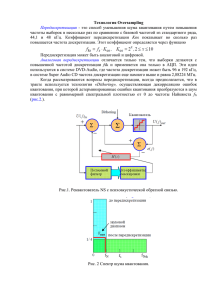
Рис.1. Дискретизация и квантование:
А - исходная функция, Б - квантование, В – дискретизация,
Г - дискретизация с квантованием
Интервал дискретизации
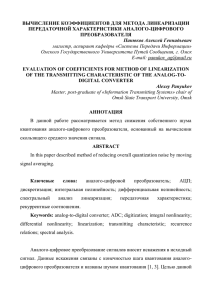
Пусть известна кривая x(t). Если вследствие погрешностей и помех
достоверными являются только значения, разделенные промежутками Δx, то
проецируя эти точки на ось времени получим промежутки τi, через которые
целесообразно производить отсчеты (рис.2).
Рис..2. Выбор интервала дискретизации
Таким образом, дискретность по оси t полностью определяется квантованием
по уровню и крутизной функции x(t). Функцию x(t) можно аппроксимировать
ломаной линией. Тогда
где tgαi = (dx/dt)i – скорость изменения функции на участке i, т.е.
В предельных случаях:
а) при установившемся значении (dx/dt)→ 0, τi→∞ ;
б) при скачке (dx/dt)→ ∞, τi→0 .
Теоретическое обоснование процесса дискретизации информации содержит
теорема Котельникова. Она использует представление сигнала в виде спектра
гармоник. Реальный измеряемый сигнал всегда наблюдается в условиях
помех, т.е. представляет собой реализацию случайного процесса. В
некоторых случаях влиянием случайной компоненты (шума) можно
пренебречь и считать сигнал квазидетерминированным. Для анализа
сложный квазидетерминированный сигнал удобно разложить на сумму
элементарных функций ϕk(t), обладающих известными свойствами
где Ak – коэффициент разложения, называемый спектром.
Обычно для разложения используют систему функций, отвечающих на
некотором интервале времени (tn,tk ) условию ортогональности
при k≠n (k,n = 1,2,...N).
Система функций ϕk(t) называется ортонормированной, если она
удовлетворяет также условию
Система ортогональных функций, используемых для разложения сложного
квазидетерминированного сигнала в ряд, называется обобщенным рядом
Фурье, а соответствующие коэффициенты разложения – обобщенным
спектром Фурье. Наиболее часто используется разложение сигнала x(t) в ряд
по системе тригонометрических функций. Для периодического сигнала с
периодом T это разложение имеет вид:
где Ak,φk - амплитуда и начальная фаза k-й гармоники.
Теорема о дискретизации сигнала, известная как теорема Котельникова, так
определяет правило дискретизации: всякий непрерывный сигнал x(t),
обладающий ограниченным спектром частот, не содержащим частот выше,
чем Fгр, полностью определяется своими дискретными значениями в
моменты отсчета, отстоящие друг от друга во времени на интервалы
и может быть восстановлен по формуле
(1)
где F0 – частота дискретизации.
Из теоремы Котельникова следует, что частота дискретизации должна
отвечать условию F0 ≥ 2Fгр (условие Найквиста), в противном случае
возникает эффект наложения или подмены частот, который является
причиной погрешности при восстановлении сигнала.
Теорема Котельникова предполагает ограниченный спектр частот и
бесконечную протяженность во времени (надо знать все прошлые и будущие
значения), тогда как реальный сигнал имеет конечную длительность и
неограниченный частотный спектр. В этом случае применение теоремы
Котельникова дает несколько завышенную частоту F0. На практике частоту
преобразования устанавливают по соотношению
F0 = k·2fm ,
(2)
где fm – принятая максимальная частота в спектре сигнала, а k – коэффициент
запаса, обычно 1,5 ≤ k ≤ 6 .
Квантование по уровню
Квантование по уровню представляет собой преобразование множества
значений сигнала x(ti) в дискретное множество значений xk [xmin,xmax], где
k=1,2,...,n. Эти значения называются уровнями квантования. Квантование
тоже может быть равномерным и неравномерным. При равномерном
квантовании весь диапазон сигнала x(t) разбивается на n уровней с шагом
квантования
При неравномерном квантовании шаг квантования γk=xk-xk-1 между
соседними уровнями xk и xk-1 изменяется. При выбранном шаге квантования
могут быть следующие способы отнесения значений x(ti) сигнала к
соответствующему уровню квантования:
а) сигнал отождествляется с ближайшим уровнем квантования;
б) сигнал отождествляется с меньшим уровнем квантования;
в) сигнал отождествляется с большим уровнем квантования.
В случае а) максимальная погрешность квантования не превышает 0,5γk, а в
случаях б), в) погрешность может быть в два раза больше - γk. Если
рассматривать сигнал x(ti) как реализацию случайной величины X с
плотностью распределения вероятности p(x) и принять, что шаг квантования
γk мал по сравнению с диапазоном изменения сигнала, то для погрешности
квантования Δxk=x-xk будет справедливо:
математическое ожидание M[Δxk]=0;
дисперсия
где p(xk) – вероятность попадания величины x в интервал γk.
Разрядность преобразователя
Пусть некая непрерывная величина x0 измеряется и преобразуется в
цифровой код. Фактическое значение с учетом ошибки равно x = x0 + Δx .
Суммарная погрешность
Δx = Δxи + Δxh + Δxτ ,
где Δxи – погрешность измерения, Δxh – погрешность дискретизации, Δxτ –
погрешность запаздывания преобразователя.
Ошибка Δxh не превышает некоторой постоянной величины h (единицы
младшего разряда). Если рассматривать x как случайную величину, для
ошибки Δxh можно принять закон равной вероятности. Основными
характеристиками этой ошибки будут математическое ожидание mh и
дисперсия Dh. Если округление выполняется методом отбрасывания, то
Если округление оптимальное, то mh=0, а Dh – та же.
Шаг h можно определить через диапазон измерения преобразуемой
величины ΔXmax=Xmax-Xmin и число разрядов преобразователя n:
(3)
Среднеквадратичная ошибка квантования по уровню
Из условия согласования точности преобразования с точностью
измерения σh=σи (где σи – среднеквадратичная ошибка измерения) следует:
Следовательно, число разрядов
(4)
где E{Z} – целая часть числа Z.
Допустимое время преобразования
Ошибка Δxτ, вызванная запаздыванием на время преобразования τ,
является динамической и может быть определена как
Δxτ = |dx/dt|ср·τ , где |dx/dt|ср – абсолютное значение округленной на интервале
τ производной по времени от измеряемой величины. В общем случае эта
производная – случайная величина с дисперсией Dв. Эта дисперсия связана с
дисперсией Dτ ошибки запаздывания Δxτ следующим образом:
Dτ = Dв•τ2 .
Отсюда
(5)
Зададимся условием, при котором дисперсия ошибки запаздывания будет
меньше второго начального момента ошибки представления αh, где
αh = mh2 + Dh , т.е.
Dτ ≤ mh2 + Dh .
(6)
При оптимальном округлении mh=0, Dh=h2/12, подставив эти значения в (6),
получим Dτ ≤h2 /12
(7)
Подставляя (7) в (5), получим
(8)
Где
– среднеквадратичное отклонение случайной
величины |dx/dt|ср. Подставляя в (8) h из (3), получим выражение для
определения допустимого времени преобразования:
(9)
При округлении методом отбрасывания mh=―h/2, Dh=h2/12. Подставляя эти
значения в (6) и выполнив аналогичные подстановки последовательно
получим:
(10)