Перевод, doc, 172 kб
реклама

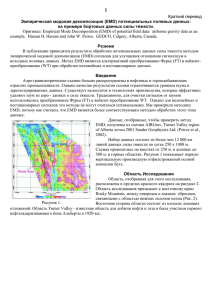
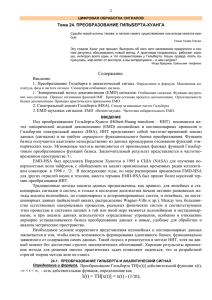
1 ИСПОЛЬЗОВАНИЕ ЭМПИРИЧЕСКОЙ МОДОВОЙ ДЕКОМПОЗИЦИИ ДЛЯ ОЦЕНКИ АМПЛИТУД В ЗАШУМЛЕННЫХ ДАННЫХ Клэр Blackman Королевский Университет Holloway Лондона. Экономический Отдел. РЕЗЮМЕ Эмпирическая модовая декомпозиция (EMD), которая может использоваться для извлечения из зашумленных данных нестационарных сигналов, редко допускает теоретическое вычисление статистических свойств извлеченных сигналов. Вместо этого требуются числовые эксперименты. В этой работе мы используем моделирование Монте-Карло, чтобы исследовать точность амплитуд синусоид, извлеченных из синтетических зашумленных сигналов методом EMD. Мы показываем, что даже при малом отношении сигнал/шум амплитуда извлеченного сигнала близка к истинной амплитуде. Мы также показываем, что краевые эффекты преобразования не воздействуют на амплитудную оценку вне первых двух колебаний. 1. ВВЕДЕНИЕ EMD было развито [1], чтобы анализировать нестационарные многокомпонентные данные в рядах функций внутренних мод (IMFs), для которого значащая мгновенная частота могла быть определена всюду. Так как EMD - зависимая от сигнала адаптивная методика, для которой теоретический анализ редко возможен, численные эксперименты часто используются для понимания ее свойств. Например, в [2] показано, что даже для чистого тона извлечение не однозначно, если период выборки недостаточен, и даются эмпирические отношения для минимального расстояния, необходимого между частотами, чтобы быть правильно решенными. В [3] показано, что EMD шумных сигналов может действовать как двухэлементный filterbank, подобный вейвлет-анализу; основанный на этом, в [4] обсуждают выбор истинных режимов сигнала от шумовых декомпозиций, и конструкцию доверительных интервалов для извлеченных режимов в случае дробного гауссова искажения. EMD может использоваться, чтобы извлечь квазипериодические колебания, похороненные в шумных данных, и позволить их амплитудам быть измеренными прямо. Важно, однако, оценить, как точно амплитуда извлеченной квазипериодичности отражает амплитуду истинной амплитуды сигнала. Цель этой работы, поэтому, исследовать амплитуды сигналов, восстановленных с шумных данных, используя EMD. Мы создаем синтетические шумные сигналы и сравниваем среднюю амплитуду извлеченных сигналов с известными амплитудами сигнала по диапазону шумовых уровней. Это обеспечивает простой метод испытания степени, с которой мы можем доверять амплитудам сигнала, извлеченного, используя EMD, когда истинная амплитуда неизвестна. Раздел 2 дает краткий обзор EMD, и обсуждает несколько из проблем реализации, с которыми сталкиваются с этим методом. В разделе 3 мы обсуждаем конструкцию синтетических данных и Метода Монте-Карло, который мы использовали в нашем анализе. Мы обсуждаем результаты наших моделирований в разделе 4, и делаем заключение в разделе 5. 2. ЭМПИРИЧЕСКАЯ МОДОВАЯ ДЕКОМПОЗИЦИЯ Чтобы извлечь IMFs из оригинальных данных, x(t), выполняется процесс просеивания: 1. Все локальные максимумы идентифицированы, и верхняя оболочка, e max (t) создана интерполяцией кубическим сплайном. Процедура повторена для локальных минимумов, формируя нижнюю оболочку, emin (t). 2. Среднее значение m1(t) верхних и нижних оболочек вычислено: 3. Вычитая m1(t) от x(t) в первую IMF, h1(t), вычислено: h1(t) содержит самый детальный масштаб или самый короткий компонент периода данных. 4. Процесс повторен, используя m1(t) как новые данные, пока извлеченное среднее не станет монотонным. Временные ряды, таким образом, раскладываются в n IMFs и остаток m n(t), который является или средней тенденцией (трендом) или константой: 2 Если сплайновые концы правильно не сдерживаются, у них есть тенденция распространить нежелательные колебания в оболочки, воздействуя на расчетное среднее значение, и, следовательно, на декомпозицию. Для устранения этого эффекта мы прибавили ~5 колебаний в каждый конец временных рядов, чтобы сплайны постепенно обнулить. Идеально, h1(t) должен быть IMF. Однако пологие откосы могут содержать локальные экстремумы в изменении от линейного до криволинейных координат, и процесс отсеивания повторятся при каждом шаге, используя h1 как ввод, пока извлеченный сигнал не станет IMF. … 3. ДАННЫЕ И МЕТОД В [6] использовано EMD, чтобы разложить разности вращения солнечного конвекционного пояса, и оценить погрешность в EMD их сигнала, создавая реализацию их временных рядов, которые они используют для моделирований Монте-Карло. Каждая точка в каждой реализации выведена от распределения со средним значением, данным значением истинной точки на графике, и среднеквадратичным отклонением, данным погрешностью измерения. Они обнаруживают, что реализация и первоначальные компоненты IMF находятся в хорошем согласии. Однако, этот метод не практичен для больших наборов данных; мы предлагаем дополнительное моделирование Монте-Карло, используя просто синтетические сигналы, для обнаружения средней амплитуды извлеченных сигналов при различных уровнях шума. У этого есть преимущество, что различные типы сигналов могут быть внедрены в различные уровни шума, и сделаны сравнения. 3.1. Данные Мы считаем простое испытательное строение сигнала синусоиды периода 30 s, длина 1000 s, выбранные в 1 s интервале, с амплитудой 1. Мы создаем 5000 шумных сигналов, используемых в каждом моделировании Монте-Карло, прибавляя реализацию Гауссова белого шума с заданной амплитудой к испытательному сигналу. Иллюстрация 1 показывает одну реализацию зашумленной синусоиды, с уровнем помех 0.6. Рис. 1. Синусоида с периодом 30 с, с добавленным гауссовым белым шумом с амплитудой 0.6 3.2. Метод Каждый шумный сигнал анализируется в пять компонентов IMF; IMFs могут извлекаться и далее, но мы нашли, что пять достаточно, чтобы фиксировать IMFs, которые содержат сигнал. Левые панели иллюстрации 2 показывают пять IMFs сигнала, который показан в иллюстрации 1. h1 содержит самые высокие частотные составляющие шумного сигнала; поочередные IMFs содержат более длинные данные периода. IMFs h3 и h4 оба содержат области синусоидального сигнала. Это разбиение сигнала по IMFs следствие адаптивной природы EMD, и делает автоматизированную идентификацию IMFs нетривиальный. Мы используем самые высокие пики в периодограмме каждой IMF, чтобы первоначально идентифицировать делящиеся без остатка компоненты IMF сигнала; правые панели в иллюстрации 2 показывают периодограммам расчетного IMFs. Это ясно, что и IMFs h3 и h4 содержат существенную мощность в 0.03 Hz, соответствуя 30 s периодическим сигналам. 3 Рис. 2. Левые панели показывают поочередные IMFs от EMD синусоидального сигнала, разрушенного с Гауссовым белым шумом амплитуды 0.6. Панель направо от каждого IMF показывает периодограмму IMF. Оба IMFs h3 и h4 содержат области основной 30 s синусоиды. Как только содержавшие сигнала IMFs были найдены, мы идентифицируем максимумы и минимумы в IMFs, которые соответствуют истинным максимумам сигнала и минимумам: экстремум в IMF, как полагают, соответствует истинному экстремуму сигнала, если он происходит в пределах 5 s истинного экстремума сигнала, и имеет амплитуду, больше чем 0.6 раза истинного экстремума сигнала. Иллюстрация 3 показывает IMF h3. Позиции истинных максимумов сигнала обозначены открытыми треугольниками, в то время как максимумам IMF, идентифицированным как соответствие максимуму сигнала, показывают открытые круги. Рис. 3. IMF h3 (сплошная линия) и максимумы IMF, идентифицированные на соответствие максимуму сигнала (открывают круги). Позиции истинных максимумов сигнала обозначены открытыми треугольниками. Таким образом, от каждой реализации мы извлекаем времена и амплитуды соответствия экстремумов истинным экстремумам. Составляя в среднем по этим 5000 реализации, мы получаем среднюю амплитуду и среднеквадратичное отклонение каждого извлеченного экстремума. 4. РЕЗУЛЬТАТЫ Иллюстрация 4 показывает свободный от помех сигнал (сплошная линия), со средней амплитудой и средними квадратическими ошибками каждого экстремума (черные точки), вычисленные от 5000 реализации с уровнем помех 0.6. Краевые эффекты, вызванные ограниченностью сплайновых кривых, очевидны в экстремумах с обоих концов данных, где средняя амплитуда - некоторые - более низкая, чем истинное значение. Однако эти эффекты не распространяются внутрь вне двух колебаний. Составление в среднем среднего числа экстремумов и среднеквадратичных отклонений по всем экстремумам дает нам среднюю амплитуду и погрешность для извлеченного сигнала, который может быть сравнен с амплитудой 1 из свободного от помех сигнала. 4 Рис. 4. Свободный от помех сигнал обозначен сплошной линией. Среднее число экстремумов и среднеквадратичные отклонения, найденные моделированиями Монте-Карло (использующий уровень помех 0.6), обозначены черными точками и планками погрешностей. Таблица 1. Средние амплитуды и стандартные отклонения от моделирований Монте-Карло извлечения сигнала из шумных данных. Шум Среднее Средний IMF Уровень число Амплитуда станд. 0.1 0.98 0.13 0.2 1.01 0.10 0.3 1.02 0.16 0.4 0.99 0.20 0.5 0.96 0.20 0.6 0.95 0.19 0.7 0.98 0.19 Таблица 1 дает средние амплитуды и стандартные отклонения, найденные для шумовых уровней в пределах от 0.1 к 0.7. 5000 реализации использовалась на каждом шумовом уровне. Даже когда шумовой уровень 0.7, средняя амплитуда близка к истинной амплитуде, и во всех случаях истинная амплитуда (1) в пределах планок погрешностей. 5. ЗАКЛЮЧЕНИЕ Мы разработали метод для того, чтобы оценить точность амплитуды сигналов, извлеченных из составных шумных сигналов, используя EMD. Мы показали, что даже для данных с относительно низким отношением сигнал-шум, амплитуды содержавшего сигнал IMFs точно отражают амплитуду свободного от помех сигнала. Краевые эффекты, из-за ограничения сплайновых кривых, используемых в аппроксимации огибающих, кажется, не распространяются вне первых двух колебаний Этот метод может легко быть расширен, чтобы исследовать более сложные испытательные сигналы, содержащие множественные периодические узлы, и квазипериодические узлы. Шумовые модели кроме Гауссова белого шума могут также быть исследованы. Другое применение этого метода должно проверить точность времени, в которое извлекается экстремум, по сравнению со временами, в которые в действительном сигнале имеются экстремумы. 6. ССЫЛКИ [1] N.E. Huang, Z. Shen, S.R. Long, M.C. Wu, H.H. Shih, Q. Zheng, N. Yen, C.C. Tung, and H.H. Liu, “The empirical mode decomposition and hilbert spectrum for nonlinear and nonstationary time series analysis,” Proc R. Soc. Lond. A, vol. 454, pp. 903–995, 1998. [2] G. Rilling, P. Flandrin, and P. Gon¸calv`es, “On empirical mode decomposition and its algorithms,” 2003. [3] P. Flandrin, G. Rilling, and P. Gon¸calv`es, “Empirical mode decomposition as a filter bank,” IEEE Signal Process. Lett., vol. 11, pp. 112–114, 2004. [4] P. Flandrin, P. Gon¸calv`es, and G. Rilling, “Detrending and denoising with empirical mode decomposition,” in Proceedings of the 12th European Signal Processing Conference (EUSIPCO ’04), Vienna, Austria, September 2004. [5] N.E. Huang, Z. Shen, and S.R. Long, ,” Ann. Rev. Fluid Mech., vol. 31, pp. 417–457, 1999. [6] R. Komm, F. Hill, and R. R. Howe, “Empirical mode decomposition and hilbert analysis applied to rotation residuals of the solar convection zone.,” Astrophysical Journal, vol. 558, pp. 428–441, 2001. 2009.