1.7. Нормальное, тангенциальное и полное ускорения
реклама

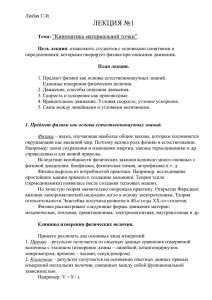
ТЕМА2.Виды механического движения §1.4. Равномерное и равнопеременное движение Существует несколько классификаций движения по тому или иному признаку. Так, механическое движение подразделяют на равномерное и неравномерное. Равномерное движение – можно определить несколькими способами: 1. равномерное движение – это движение, при котором за любые равные промежутки времени материальная точка (тело) совершает одинаковые перемещения, 2. равномерное движение – это движение с постоянной скоростью, 3. равномерное движение – это движение, при котором ускорение равно нулю. Неравномерным движением материальной точки называют движение, при котором скорость меняется с течением времени. Одной из характеристик неравномерного движения является ускорение. Простейший вид неравномерного движения – равнопеременное движение. Равнопеременное движение – это: 1. движение, при котором за любые равные промежутки времени скорость точки (тела) изменяется на одну и ту же величину, 2. движение, при котором ускорение a материальной точки остается постоянным. Интегрируя соотношения, определяющие мгновенную скорость (1.4) и мгновенное ускорение (1.7), можно получить основные законы кинематики материальной точки. Законы кинематики: 0 at , at 2 , S 0t 2 (1.11) первое из уравнений системы называется законом изменения скорости – (t ) , второе – законом движения – S S (t ) ; 0 – начальная скорость, т. е. скорость материальной точки в момент времени t 0 , a – ее ускорение. Законы (1.11) включают в себя два частных случая: 1. Равнопеременное движение без начальной скорости: начальная скорость 0 равна нулю, ускорение a не равно нулю и 2. Равномерное движение со скоростью 0 и ускорением a равным нулю. Законы кинематики в этих случаях принимают следующий вид: at , at 2 S 2 и 0 , S 0t В координатной записи уравнения (1.11) имеют следующий вид: X 0 X a X t , a t , 0Y Y Y Z 0 Z aZ t , 2 S t a X t , 0X X 2 2 S t aY t , Y 0Y 2 2 S Z 0 Z t aZ t . 2 Закон движения – движущейся материальной S S (t ) (1.11,а) позволяет определить координаты точки в произвольный момент времени. Учитывая, что S r1 r0 запишем: at 2 r1 r0 0t . 2 Из последнего соотношения следует, что координата Х в момент t равна X 1 X 0 0 X t aX t 2 . 2 Механические движения различаются также по виду траекторий: прямолинейное, вращательное и криволинейное. Если модуль перемещения dr dr по величине равен пройденному пути ds , то материальная точка движется по прямой линии. В этом случае модуль мгновенной скорости равен первой производной пути по времени: dr dr . dt dt (1.12) Соотношение (1.12) – основное при решении задач по кинематике. Интегрируя его, можно найти длину пути, пройденного телом за время от t1 до t 2 : t2 S dt . (1.13) t1 Для равномерного движения со скоростью const из (1.13) следует: t2 S dt t2 t1 dt , (1.14) t1 здесь t t2 t1 – время движения. §1.5. Кинематика движения по окружности Если материальная точка М движется по окружности , то ее положение определяют вектором угла d , который образован ее радиус вектором R с некоторой, произвольно выбранной осью X . Рис.1.4. - линейная скорость, d - угол поворота радиус-вектора точки за время dt , d - вектор угла поворота, - угловая скорость. Вектор угла d можно определить следующим образом: d deZ , здесь eZ – единичный вектор оси вращения Z . Заметим, что модуль радиусвектора материальной точки равен радиусу окружности, по которой она движется: R R . При решении задач удобно выбрать направление оси X так, чтобы она проходила через начальное положение движущейся точки. Модуль вектора угла d численно равен углу поворота радиус-вектора, измеренному в радианах; направление d определяется по одной из альтернативных (Б.I) формулировок правила буравчика (правого винта). Правило буравчика (Б.I): если расположить ось буравчика вдоль оси вращения и вращать его рукоятки в направлении движения материальной точки (в направлении ее линейной скорости), то направление поступательного движения конца буравчика укажет направление вектора угла d . Движение материальной точки (а также центра масс материального тела) по окружности характеризуется угловой скоростью и угловым ускорением . Как в кинематике поступательного движения, можно ввести понятие средней и мгновенной угловой скорости, углового ускорения. Средняя угловая скорость CP равна отношению угла поворота радиус-вектора материальной точки ко времени t , за которое этот поворот произошел: CP eZ , t t (1.15) где eZ – единичный вектор оси вращения Z . Средняя угловая скорость CP показывает, на какой угол повернулся радиус-вектор материальной точки за единицу времени. Измеряется она в единицах рад/c, чаще, опуская наименование "радиан" используют секунду в минус первой степени (с –1). Мгновенная угловая скорость – это угловая скорость движения материальной точки в данный момент времени, в данной точке траектории. Мгновенная угловая скорость – векторная физическая величина, равная первой производной угла поворота радиус-вектора материальной точки по времени: d d eZ dt dt (1.16) Физический смысл мгновенной и средней угловой скорости одинаков – они характеризуют угол, на который повернулся радиус-вектор за единицу времени. Соотношения (1.15) и (1.16) указывают, что векторы угловой скорости параллельны вектору угла поворота d . Векторы средней и мгновенной угловой скорости откладывают на оси вращения, их направление определяется по правилу (Б.I) буравчика (правого винта): если расположить буравчик вдоль оси вращения и вращать рукоятки в направлении движения материальной точки (в направлении ее линейной скорости), то направление поступательного движения конца буравчика укажет направление вектора угловой скорости. Среднее угловое ускорение (или )– векторная величина, равная отношению приращения угловой скорости к промежутку времени, за который это изменение произошло: . t (1.17) Угловое ускорение показывает, на сколько изменилась угловая скорость за единицу времени. Мгновенное угловое ускорение (или ) – векторная величина, равная первой производной угловой скорости или второй производной угла поворота по времени: d d 2 2 dt dt (1.18) Угловое ускорение измеряется в рад/с2, или с–2. Как следует из (1.1) и (1.16), угловое ускорение откладывают на оси вращения. При условии, что вектор совпадает по направлению с вектором угловой скорости , имеет место ускоренное вращение, если вектор направлен противоположно вектору , то характер вращения – замедленный. Основными характеристиками вращательного движения являются: период вращения (обращения) Т – время одного полного оборота. частота вращения n (используют также обозначения f или ) – число полных оборотов в единицу времени. Период вращения Т измеряется в секундах ( Т c ), частота вращения в с–1 ( n c 1 ). Очевидна связь частоты и периода вращения: n 1 . T (1.19) Положив в соотношении (1.15) 2 и t T , получим для средней угловой скорости: CP 2 2n . T (1.20). При равнопеременном вращательном движении угол поворота , угловая скорость и угловое ускорение связаны соотношениями, аналогичными соотношениям, полученным для поступательного движения. Интегрируя соотношения (1.16) и (1.18), приходим к основным уравнениям кинематики вращательного движения: t 2 0 t , 0t (1.21) 2 здесь 0 – начальная угловая скорость. Эти уравнения решают основную задачу кинематики для вращательного движения, если известны начальная угловая скорость 0 и угловое ускорение . Приведем важное соотношение, определяющее число N оборотов, совершенных телом: N или 2 (1.22,а) t2 N dt t1 2 t2 0 t1 t dt 2 (1.22,б) , где положительный знак пишется при ускоренном вращении, знак минус – при замедленном. §1.6. Взаимосвязь угловых и линейных характеристик при движении по окружности Обратимся вновь к рисунку 1.4, чтобы установить связь линейной и угловой скоростей при движении по окружности. Для бесконечно малого угла поворота d путь dS , пройденный частицей равен длине дуги окружности, т. е.: dS Rd . На основании соотношения (1.22) модуль линейной скорости найдем дифференцированием: Векторное произведение dS Rd d R R dt dt dt векторов a и (1.23) b есть c вектор (обозначается c a , b ), модуль которого равен произведению модулей векторов-сомножителей на синус угла между этими векторами. Направление вектора векторного произведения определяется по правилу буравчика (Б.II). Правило буравчика (Б.II) для нахождения направления вектора векторного произведения c a , b : 1. отложить векторы a и b от одной точки, 2. провести через них плоскость, 3. расположить буравчик перпендикулярно полученной плоскости, 4. вращать рукоятки буравчика от первого вектора-сомножителя a ко второму b в направлении меньшего угла, 5. направление поступательного движения конца буравчика укажет направление вектора с векторного произведения. Рис.1.5. К определению векторного произведения векторов. c ab sin или c ab sin a, b , где a , b . Модуль векторного произведения векторов равен площади параллелограмма, построенного на векторах сомножителях a и b , как на сторонах. Анализируя направления векторов , R и (рис.1.4) приходим к выводу, что они связаны посредством следующего векторного произведения: , R . (1.24) Формулу (1.24) называют формулой Эйлера. Покажем, что движение материальной точки по окружности с постоянной по модулю линейной скоростью представляет собой равнопеременное движение. Поскольку мгновенная линейная скорость всегда направлена по касательной к траектории в данной ее точке, то (рис.1.6), оставаясь постоянной по модулю, она непрерывно изменяется по направлению, поэтому скорости движущейся точки в положениях А и В не равны: A B . Изменение вектора скорости свидетельствует о том, что материальная точка на окружности испытывает ускорение. Так как ускорение a по определению равно d dt , то его направление совпадает с направлением вектора изменения скорости, т. е. a d . Вычислим величину и направление этого ускорения. Рис.1.6. К анализу равномерного вращательного движения точки. AB OA R , R - радиус окружности. Пусть в момент времени t материальная точка находилась в точке A траектории, а через малый промежуток времени dt переместилась в близко расположенную точку B (на рисунке 1.6 дуга AB для наглядности показана увеличенной). Изменение скорости за время dt равно разности d B A , показанной на рисунке. Рассмотрим треугольники AOB и CBD . Эти треугольники подобны: они равнобедренные ( OA OB R и BC BD ) и имеют равные углы AOB DBC d (это углы со взаимно перпендикулярными сторонами). Из подобия треугольников AOB и CBD следует, что AB : AO DC : BD . (*) Длина дуги AB Rd ( d – центральный угол, опирающийся на дугу AB ), из треугольника OAB выразим хорду AB : AB 2R sin d 2 Rd . Для бесконечно малого промежутка времени dt угол d мал, поэтому длина дуги приблизительно равна хорде: CD d 2 sin d 2 d adt . Подставляя полученные величины отрезков в пропорцию (*), имеем Rd : R adt : . Откуда следует: что величина ускорения численно равна: a d dt d dt . (**) Получим, что aц R 2 2 R . (1.25) Для определения направления вектора ускорения рассмотрим треугольник BCD . Направление вектора a , как уже отмечено, совпадает с направлением вектора d , в нашем случае – с направлением отрезка CD . Из треугольника BCD следует, что угол – угол между векторами A и d равен d 2 . Очевидно, что при d 0 угол 2 . Таким образом, вектор d , а значит и вектор ускорения a , при dt 0 стремятся к положению нормали к вектору скорости . Таким образом, при движении по окружности с постоянной по величине линейной (или угловой) скоростью, материальная точка испытывает постоянное ускорение, направленное по радиусу к ее центру. Такое ускорение называют центростремительным. Формулу для центростремительного ускорения в векторном виде записывают, используя векторное произведение векторов линейной и угловой скорости: aц , . (1.26) Используя соотношение (1.25) и векторное тождество ab, c ba, c ca, b последнюю формулу можно записать так: 2 R 2 aц , , R R . R R (1.27) Вектор R R n – есть вектор внешней нормали к траектории. §1.7. Нормальное, тангенциальное и полное ускорения Взаимосвязь угловых и линейных характеристик можно рассмотреть на основе общих соображений. Пусть мгновенная линейная скорость материальной точки, движущейся по окружности, – ее угловая скорость. Введем единичный вектор касательной , связанный с движущейся материальной точкой. Тогда скорость можно записать так: , здесь (1.28) – проекция вектора скорости на направление вектора касательной. Дифференцируя (1.27) по времени, получим: d d d a . dt dt dt (1.29) Преобразуем второй член последнего соотношения: d d dl d . 2 dt dl dt dl (1.30) Как видно из рисунка (1.6) d 1 . dl R (1.31) Направление d dl совпадает с направлением вектора внутренней нормали n . Окончательно (1.29) запишем следующим образом: d 2 a n. dt R В соотношении тангенциальной (1.32) первое a , ускорение (1.32) слагаемое второе – представляет нормальное ан собой или центростремительное ускорение. Таким образом, a aн а (1.33) полное ускорение движущейся точки равно векторной сумме нормального и тангенциального ускорений. Модуль полного ускорения определяется соотношением: 2 d a aн а dt R 2 2 (1.34) Воспользуемся формулой Эйлера (1.24): , R . Дифференцируя по времени (1.34), имеем: d d dR , R , , (1.35) dt dt dt где d dt угловое ускорение, dR dt – мгновенная линейная скорость материальной точки. d Из рисунка 1.7 видно, что множитель , R представляет собой dt dR тангенциальное ускорение, а , , , , – нормальное или dt центростремительное ускорение. Рис.1.7. - мгновенная линейная скорость; а - тангенциальное, а n -нормальное и a - полное ускорения частицы. O - центр касательной окружности радиусом R , n - внешняя нормаль к траектории движения. Таким образом (1.35) можно привести к виду: a a 2H a 2 R 2 4 . (1.36) §1.8. Кинематика произвольного криволинейного движения В общем случае неравномерного движения материальной точки по криволинейной траектории, ускорение а равно сумме нормального аН (центростремительного) и тангенциального а ускорений: a aн а . Вектор тангенциального ускорения а направлен по касательной к траектории, вектор аН – по нормали к траектории (центростремительное ускорение); аН характеризует изменение направления скорости со временем, а – характеризует изменение модуля скорости. Величины аН и а определяют характер движения материальной точки. 1. аН 0 , а 0 – прямолинейное равномерное движение, 2. аН 0 , а const – прямолинейное равнопеременное движение, 3. аН const 0 , а 0 – движение по окружности с постоянной по величине скоростью, 4. аН 0 , а const , при R const равнопеременное движение по окружности, 5. аН 0 , а 0 – криволинейное неравномерное движение. §1.9. Кинематика колебательного движения Колебания – это движения или процессы, обладающие той или иной степенью повторяемости во времени. Колебания широко распространены в природе и имеют место в самых разнообразных явлениях, например, качание маятника пружинных часов, мигание индикатора таймера, изменение значения переменного тока, величины напряжения на обкладках конденсатора, включенного в колебательный контур и т. п. Повторяющиеся процессы протекают внутри живых организмов, например, биение сердца, чередование промежутков сна и бодрствования, ритмы, сопровождающие работу человеческого мозга. Таким образом, колебания присутствуют как в живой, так и в неживой природе; в микроскопических и макроскопических процессах. Важнейшая особенность колебательного движения состоит в том, что оно происходит в системах, занимающих ограниченную часть пространства. Так, совершая колебательное механическое движение, система движется около некоторого положения равновесия, но энергия системы не выходит за пределы границ системы. Колеблющаяся величина, заключена в некоторый интервал, содержащий ее среднее значение. Несмотря на качественное различие тех или иных колебательных процессов, все они могут быть описаны одними и теми же количественными законами. Свободные, или собственные колебания – это колебания, которые происходят в системе, выведенной из состояния равновесия и предоставленной самой себе. Гармоническими колебаниями называют колебания, при которых колеблющаяся величина изменяется во времени по закону синуса или косинуса. Гармонические колебания представляют собой простейшие колебания. Уравнение гармонически меняющейся величины может быть как с помощью функции синуса, так и с помощью функции косинуса следующим образом: или A cost 0 (1.37,а) A sin t 0 . (1.37,б) В формулу (1.37) входят следующие величины: Амплитуда колебаний А – наибольшее значение колеблющейся величины . Из (1.37) следует, что А 0 . Фаза колебаний – t 0 – аргумент функции синуса или косинуса в уравнении гармонического колебания. Начальная фаза колебаний – 0 значение фазы в момент времени t 0. При необходимости, переход от функции синуса к функции косинуса осуществляется по формулам приведения, при этом изменяется начальная фаза колебаний. Например, в формулах 1.37 0 0 2 . Период колебаний T – это время, за которое совершается одно полное колебание. Можно говорить, что период – это наименьший промежуток времени, по истечении которого колеблющаяся величина имеет то же самое значение и ту же скорость изменения. Частота колебаний ( n , или f ) – величина обратная периоду колебаний 1 T . Круговая, или циклическая, частота связана с частотой соотношением 2 . Измеряется циклическая частота в с–1. Она показывает, какое число колебаний происходит за 2 секунд. Используя определение периодичной функции – запишем: A cost 0 A cos t T 0 . F x F x T , Поскольку функция A cost 0 имеет период 2 , то сравнение фаз колебаний позволяет установить связь периода колебаний с циклической частотой: t T 0 t 0 2 , отсюда следует, что T 2 . Частота показывает, какое число колебаний совершается за единицу времени (секунду). Измеряется частота в герцах: Гц. 1Гц – это такая частота, при которой в единицу времени совершается одно колебание. Скорость изменения и ускорение – a колеблющейся величины определяется обычным образом (по формулам (1.4) и (1.7)): a d A sin t 0 dt d d 2 2 A 2 cost 0 dt dt (1.38) (1.39) Начальную фазу колебаний, можно определить с помощью первого из уравнений (1.37) по известным начальным условиям 0 , 0 : 0 t 0 a cos 0 и 0 t 0 d a sin 0 . dt Откуда следует: tg0 0 . 0 (1.40) Амплитуду гармонически колеблющейся величины можно вычислить по формуле: A 02 02 2 (1.41)