Классы динамических систем, основанных на знаниях, и их
реклама

УДК 004.896(06) Интеллектуальные системы и технологии
Г.С. ОСИПОВ
Институт системного анализа РАН, Москва
КЛАССЫ ДИНАМИЧЕСКИХ СИСТЕМ, ОСНОВАННЫХ
НА ЗНАНИЯХ, И ИХ АТТРАКТОРЫ
В работе рассматриваются классы динамических систем, основанных на знаниях и их аттракторы. Приводится их классификация и исследуется предельное
поведение динамических систем.
1. Введение. Динамические системы, основанные на знаниях, с одной
стороны являются динамическими системами [1], с другой – интеллектуальными системами, основанными на знаниях [2]. Здесь они будут рассматриваться, прежде всего, как динамические системы с особым способом описанными состояниями, законами поведения и иными атрибутами
динамических систем.
В общем случае достижимость состояний в системах, основанных на
знаниях, определяется их базами знаний и стратегиями управления [3]. В
том случае, когда способом представления знаний в системе является
множество правил то, как показано в [4], достижимость полностью определяется устройством множества правил, общими принципами организации правил и используемой стратегией управления.
В настоящей работе будет выполнена классификация таких систем, исследовано их предельное поведение и получены структуры, возникающие
в пространстве состояний таких систем.
2. Динамические системы, основанные на правилах. Пусть U –
множество слов конечной длины над некоторым алфавитом. Зададим на U
семейство алгебраических систем с сигнатурами, включающими одно-,
двух- и n-местные отношения на U: P1, P2, …, Pm. Для простоты будем
полагать, что в каждую сигнатуру входит ровно по одному отношению
каждой местности. Каждую такую алгебраическую систему будем называть состоянием и обозначать через s. Множество всех состояний обозначим через S. Элементы отношений местности >1 будем далее называть
фактами, элементы одноместных отношений - признаками. Если N - дискретное линейно - упорядоченное множество, то семейство частичных
отображений R = {ri} (i = 1, 2, …,M), R: S N S, таких что r (s, n) = (s, n+1),
где (s,n) = (z, n) (p, n) – состояние системы в точке n, (s,n) = (z, n) (p, n),
Работа выполнена при поддержке РФФИ (проект №06-07-89110-а)
ISBN 978-5-7262-0883-1. НАУЧНАЯ СЕССИЯ МИФИ-2008. Том 10
13
УДК 004.896(06) Интеллектуальные системы и технологии
(z, n) Pi (i 1 m) - множество фактов, (p, n) P1 - множество признаков, будем называть множеством правил переходов. Далее множество N
будем называть временем (дискретным) а для (s, n), (z, n), (p, n) используем более привычные обозначения: s(n) либо sn и т.д.
Если α P1, β P2 … Pm , то каждое правило r R имеет более
привычный вид: r = c, a(α), d(α), a(β), d(β), где a(α) и a(β) – множества
добавляемых признаков и фактов, d(α) и d(β) – множества удаляемых признаков и фактов, соответственно.
Тогда s(n+1) = r s(n), где r s(n) = z(n+1), p(n+1) , z(n+1) = z(n) a(β) \ d(β),
p(n+1) = p(n) a(α)\ d(α).
Кроме правил переходов введем в рассмотрение правила замыкания
L= {li} (i = 1, 2, …,Q), L : S S,, такие что l s(n) = z(n) a(β), p(n) a(α) ;
иначе говоря, s(n) l s(n). Применение правил из R регламентируется
следующей простой стратегией управления KR:
1.Выбрать очередное правило ri из множества правил;
2.Проверить выполнимость условия ci в текущем состоянии
3.Если ci выполнено, применить правило, т.е. поместить формулы из
a(α) и a(β) в следующее состояние и удалить из него d(α) и d(β). Иначе
перейти к п.1:
4. Перейти к выполнению стратегии KL:
Выбрать очередное правило li из множества правил;
Проверить выполнимость условия ci в текущем состоянии;
Если ci выполнено, применить правило, т.е. поместить формулы
из a(α) и a(β) в текущее состояние. Иначе перейти к п.1;
Перейти к выполнению стратегии KR.
Условием остановки стратегии KR является исчерпание множества
применимых правил, условием остановки стратегии KL является стабилизация состояния. Точнее говоря, если X – множество фактов и признаков,
X, K(,П) применение стратегией К правила П к состоянию , то обозначим: KL(,l)= (), где lL; KR(,r)= (), где r R, а () назовем
функцией замыкания, () – функцией переходов.
Тогда, H = X, T, , будем называть динамической системой, основанной на правилах. Неподвижную точку уравнения () = будем
называть состоянием системы, а неподвижную точку уравнения ( ()) =
при t , (если она существует) - предельным состоянием системы.
3. Классификация динамических систем, основанных на правилах.
В качестве оснований классификации возьмем вид правил в системе и
ISBN 978-5-7262-0883-1. НАУЧНАЯ СЕССИЯ МИФИ-2008. Том 10
14
УДК 004.896(06) Интеллектуальные системы и технологии
некоторые соотношения на множествах компонентов правил. Выделим
вначале классы систем, отличающиеся видом правил:
Система H1, правила которой имеют вид: l =c, a(α), a(β), .
Система H2, правила которой имеют вид: r =c, a(α), a(β), d(α), d(β) .
Выделим теперь классы систем, отличающиеся некоторыми соотношениями на множествах компонентов правил. Пусть s0 – начальное состояние динамической системы, тогда,
система H21 - система Н2, такая что ( (a(α) a(β))) ((d(α)
d(β))) = ;
система H22 - система Н2, такая что s0 ((d(α) d(β))) = ;
система H23 - система Н2, такая что ((a(α) a(β))) ((d(α) d(β))) ≠
≠ и s0 ((d(α) d(β))) ≠ (здесь через (a(α) a(β)) и (d(α) d(β))
обозначено объединение множеств добавляемых и, соответственно, удаляемых фактов по всему множеству правил систем H2).
4. Предельные состояния динамических систем, основанных на
правилах. Приведем (без доказательств) несколько достаточно простых
утверждений:
Утверждение 1. Предельное состояние системы Н1 равно s0 ((a(α)
a(β))).
Утверждение 2. Предельное состояние системы Н21 равно s0 / ((d(α)
d(β))) ( (a(α) a(β))).
Утверждение 3. В системах Н22 и Н23 стабилизация состояний, вообще говоря не наступает; однако каждое состояние каждой из указанных
систем лежит в множестве s0 ((a(α) a(β))).
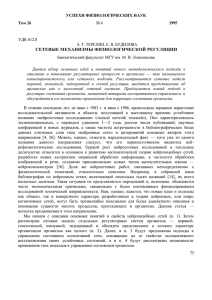
Утверждение 4. Предельные траектории систем Н22 или Н23 при достаточно большом t имеют вид, представленный на диаграмме 1, где для Н22 для всех
i: si0 si1, где первый индекс-номер состояния; второй индекс – номер траектории; т.е. стабилизация траектории наступает после второго её «витка».
Диаграмма 1
ISBN 978-5-7262-0883-1. НАУЧНАЯ СЕССИЯ МИФИ-2008. Том 10
15
УДК 004.896(06) Интеллектуальные системы и технологии
Предельные состояния и предельные траектории будем называть аттракторами динамических интеллектуальных систем.
Если множества правил R и L таковы, что в процессе применения они
«расщепляются» на некоторые несовпадающие подмножества, то в пространстве состояний системы H они формируют множество аттракторов,
которое, вообще говоря, равно числу несовпадающих подмножеств в
множестве правил и, если не заботиться о возможной неприменимости
правил, ограничено сверху суммой числа сочетаний из N по 1, по 2 и т.д.
по N. На диаграмме 2 заштрихованные области пространства состояний аттракторы типа предельных состояний; замкнутые кривые в пространстве состояний - аттракторы типа предельных траекторий.
Диаграмма 2
Заключение. В работе рассмотрены предельные состояния систем, основанных на правилах и структура множества таких состояний. Оказалось, что некоторые типы систем не имеют стабильных предельных состояний, но если множество правил таких систем конечно, то их состояния образуют циклические последовательности. В случае же бесконечного множества правил в системах Н22 и Н23 не возникает и циклов. Системы Н1 и Н21и стабилизируются в любом случае.
Список литературы
1. Месарович М., Такахара Я. Общая теория систем: математические основы. М.: Мир, 1978.
2. Нильсон Н. Приципы искусственного интеллекта. М.: Радио и связь, 1985.
3. Lebedeva T.G., Osipov G.S. Architecture and Controllability of Knowledge-based Discrete Dynamical Systems // Journal of Computer and System Sciences International. NY, Vol. 39, No.5, 2000.
4. 4.Osipov G.S. Dynamics in integrated knowledge-based Systems // Proc. of the 1998 IEEE
International Symposium on Intelligent Control (September,14-17,1998). - Gaithesburg, Maryland,
USA, 1998, pp.199-2003.
ISBN 978-5-7262-0883-1. НАУЧНАЯ СЕССИЯ МИФИ-2008. Том 10
16