Лекция. Графический метод решения задачи
реклама

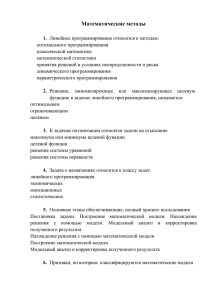
1. Графический метод решения задачи линейного программирования. Общей задачей линейного программирования называется задача, которая состоит в определении максимального (минимального) значения функции. n cx max L (x) = j 1 j (1.1) j при условиях n a x b, i 1, k j 1 ij j (1.2) i n a x b, i k1,m j 1 ij xj 0 j (1.3) i , j 1,l;l n (1.4) где aij , bi , cj – заданные постоянные величины и Определение. Функция (1.1) линейной формой) задачи k ≤ m. называется целевой функцией (или (1.1) – (1.4), а условия (1.2) – (1.4) - ограничениями данной задачи. Определение. Стандартной (симметричной) задачей линейного программирования называется задача, которая состоит в определении максимального значения функции (1.1) при выполнении условий (1.2) и (1.4), где k = m и l = n . Определение. Канонической (основной) задачей линейного программирования называется задача, которая состоит в определении максимального значения функции (1.1) при выполнении условий (1.3) и (1.4), где k = 0 и l = n . Определение. Совокупность чисел ограничениям задачи (1.2) – (1.4), X (x ,x ,..., x ), 1 2 n удовлетворяющих называется допустимым решением (планом). Определение. План задачи (1.1) * * * * X ( x ,x2,..., x ), при 1 n котором целевая функция принимает максимальное (минимальное) значение, называется оптимальным. Определение. Опорный план называется неврожденным, если он содержит m положительных компонент, в противном случае – план вырожденный. Свойства основной задачи линейного программирования (1.5) – (1.7) тесным образом связаны со свойствами выпуклых множеств. Определение. Множество точек называется выпуклым, если вместе с любыми двумя своими точками оно содержит и их произвольную выпуклую комбинацию. Геометрический смысл этого определения состоит в том, что множеству вместе с его двумя произвольными точками полностью принадлежит и прямолинейный отрезок, их соединяющий. Примерами выпуклых множеств являются прямолинейный отрезок, полуплоскость, круг, шар, куб, полупространство и др. Определение. Тоже Х выпуклого множества называется угловой, если она не может быть представлена в виде выпуклой линейной комбинации двух других различных точек данного множества. Например, угловыми точками треугольника являются его вершины, круга – точки окружности, которая его ограничивает. Теорема Множество 1. планов основной задачи линейного программирования является выпуклым ( если оно не пусто). Теорема 2. Если основная задачи линейного программирования имеет оптимальный план, то максимальное значение целевая функция задачи принимает в одной из вершин многогранника решений. Если максимальное значение достигается более чем в одной вершине, то целевая функция принимает его во всякой точке, являющейся выпуклой комбинацией этих вершин. Непустое множество планов основной задачи линейного программирования образует выпуклый многогранник, каждая Ершина которого определяет опорный план. Для одного из опорных планов (одной из вершин многогранника решений) значение целевой функции является максимальным (при условии, что функция ограничена сверху на множестве планов). Вершину многогранника решений, в которой целевая функция принимает максимальное значение, найти сравнительно просто, если задача, записанная в форме основной, содержит не более двух переменных, т.е. L( X ) = С1 · x1+ С2 · x2 при условиях a x a b i1 1 i2x 2 i xj ≥ 0, (1.9) , (i 1, k ) (1.10) (1.11) Каждое из неравенств (1.10), (1.11) системы ограничений задачи геометрически определяет полуплоскость допустимых значений переменных соответственно с граничными прямыми a x a b i1 1 i2x 2 i, (i 1, k ) , x1 = 0, x2 = 0. Если система неравенств допустимых решений называется (1.10), (1.11) совместна, то задачи является выпуклое множество, которое многоугольником решений. Стороны этого многоугольника лежат прямых, уравнения которых получаются заменой знаков неравенств на знаки вершины областью из исходной системы точных равенств. Для определения многоугольника решений, в которой функция принимает максимальное значение, необходимо построить линию (начальную прямую) С1x1+С2x2=0, проходящую через начало координат на плоскости x10x2, и передвигать ее в направлении вектора N = (С1,С2) до тех пор, пока она не пройдет через последнюю общую точку с многогранником решений. Координаты указанной точки определяют оптимальный план данной задачи. Таким образом, решение задачи линейного программирования графическим методом включает в себя следующие этапы. 1. На плоскости x10x2 строят прямые, уравнения которых получаются в результате замены в ограничениях (1.10) и (1.11) знаков неравенств на знаки точных равенств. 2. Находят полуплоскости, определяемые каждым из задачи. 3. Находят многоугольник решений. ограничений 4. Строят вектор N = (С1,С2), направление которого указывает на возрастание целевой функции. 5. Строят начальную прямую С1x1+С2x2=0, проходящую через начало координат. 6. Передвигают начальную прямую в направлении вектора N = (С1,С2) до положения опорной прямой (до крайней угловой точки многогранника решений). В результате находят точку, в которой целевая функция принимает максимальное значение, либо множество точек с одинаковым значением целевой функции, если начальная прямая сливается с одной из сторон многоугольника решений, либо устанавливается неограниченность сверху функции на множестве планов (L(x) → ∞). 7. Определяют координаты точки максимума функции и вычисляют значение целевой функции в этой точке. Замечания. 1. Нахождение минимального значения целевой функции отличается от нахождения ее максимального значения при данной системе ограничений тем, что начальная прямая передвигается в направлении, противоположном вектору N. 2. В случае, когда требуется найти минимум функции (1.1), можно решить задачу на максимум целевой функции, так как min L(X) = – max (–L(X)). 3. Если ограничения исходной задачи отражают расход и наличие производственных ресурсов, то числовое значение дополнительной переменной равно объему соответствующего неиспользуемого ресурса. 4. Если максимум (или минимум) целевой функции достигается на отрезке АВ многоугольника решений, то необходимо определить координаты угловых точек А (x1(А), x2(А)) и В(x1(В), x2(В)) и вычислить значение целевой функции в этих точках. При этом L(X)В т.А = L(X)В т.В и множество оптимальных планов можно представить как выпуклую линейную комбинацию угловых точек отрезка АВ: * (A ) ( B ) x x ( 1 ) x 1 1 1 x x ( 1 ) x * 2 (A ) 2 где 0 ≤ α ≤ 1. (1.12) (B ) 2 Пример. Найти максимум и минимум линейной функции L( X ) = –2x1+8x2 → extr при условиях: 5 x1 x 2 0 5 x 2 x 10 2 1 x1 4 x 2 4 x x 6 2 1 x1 , x 2 0 Построим на плоскости x10x2 многоугольник допустимых решений задачи. Для этого в неравенствах системы ограничений и условиях неотрицательности переменных знаки неравенств заменим на знаки точных 5 x1 x 2 0 5 x 2 x 10 2 1 x 1 4 x 2 4 равенств: x x 6 2 1 x1 0 x 2 0 () ( ) ( ) ( ) ( ) ( ) Построив полученные граничные прямые, найдем соответствующие полуплоскости допустимых значений переменных и их пересечение. Многоугольником допустимых решений задачи является пятиугольник ABCDE, координаты точек неотрицательности переменных которого удовлетворяют условию и неравенствам системы ограничений задачи. N (2;8) y Y I 8 6 5 4 L(X) 0 3 2 I 1 II 0 –1 1 2 3 4 5 Y I 6 I x I Y I Для нахождения точек экстремума построим начальную прямую L ( X ) 2 x 8 x 0 и вектор 1 2 . Передвигая начальную прямую N (2;8) параллельно самой себе в направлении вектора которой начальная прямая Следовательно, в точке N , найдем точку D, в принимает положение опорной прямой. D целевая функция принимает максимальное значение. Так как точка D получена в результате пересечения прямых I и IY, то для определения ее координат решим систему уравнений: 5x1x2 0 . x1x2 6 Решая систему уравнений, получим x1* 1 , x2* 5 ; L ( X ) 2 1 8 5 38 . Для нахождения минимального значения целевой функции задачи, начальную прямую перемещаем в направлении, противоположном вектору N . Как видно из условий задачи, начальная прямая параллельна прямой (III), так как коэффициенты при переменных 2 8 2 . 4 1 Поэтому начальная прямая x1 и x2 пропорциональны займет положение опорной прямой в точках А, Е и в любой точке отрезка АЕ, в которых целевая функция принимает одно и тоже минимальное значение. Для определения координат угловых точек уравнений: 1. x14x2 4 . x2 0 А и Е решим системы двух линейных Получим 2. x1( A) 4 ; x2( A) 0 ; 2 4 8 0 8 . L( X ) в т.А x14x2 4 x1x2 6 Получим x1(Е) 28 2 x2( Е) ; ; 5 5 L( X ) в т.Е 28 2 2 8 8 . 5 5 Выразим координаты любой точки отрезка АЕ через координаты угловых точек, т.е. запишем множество минимальных решений: 28 28 8 * ( A ) ( Е ) ; x x ( 1 ) x 4 ( 1 ) = 1 1 1 55 5 где 0 ≤ α ≤ 1 * (A ) ( Е ) 0(1) = . x x ( 1 ) x 2 2 2 = 5 5 5 2 2 2 Таким образом, оптимальный план задачи: * Xmax(1 ;5), L(X)max 38 ; 2 2 28 8 * X min = 5 5; 5 5 , L (X)min 8 . * * Подставляя любые значения α от 0 до 1 , получим координаты множества точек отрезка АЕ, в каждой из которых целевая функция принимает минимальное значение, равное – 8.