В) Изображение сейсмограмм в цвете
реклама
 Изображение сейсмограмм в цвете")
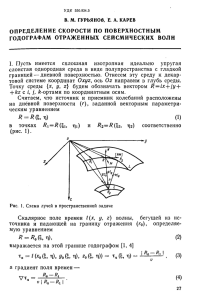
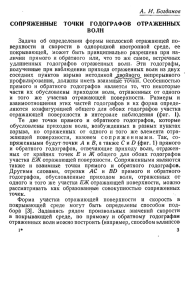
3D ВСП – АЛГОРИТМ МИГРАЦИИ, ОБРАБОТКА, РЕЗУЛЬТАТЫ В.А. Редекоп*, В.В. Помазанов*,А.А.Тихонов**. *ООО «ВимСейс Технология» г. Балашиха, ** «ПетроАльянс Сервисис Компани Лимитед», г. Москва Скважинная сейсморазведка в силу геометрии наблюдений – это пространственная сейсморазведка. Применение методики обработки данных НВСП по двумерным моделям и получение временных и глубинных разрезов, лежащих в вертикальных плоскостях, плохо согласуется с реальными данными. Такая обработка оправдана в случае вертикальной скважины и субгоризонтального залегания слоев. В других случаях представление изображений среды вертикальными трассами с площадными координатами, располагающимися по линии точек отражения от целевого горизонта, верно только для ограниченного интервала глубин. Для выше- и нижележащих глубин координаты точек отражения на глубинных разрезах могут существенно, на десятки и даже сотни метров, отличаться от координат в заголовках трасс. Применение метода ВСП в районах с крутопадающими сейсмическими горизонтами и в наклонных скважинах требует применения пространственной обработки и интерпретации полученных временных и глубинных разрезов. При этом скважинная сейсморазведка способна решать как структурные, так и литологические задачи[1]. В отличие от наземной сейсморазведки, осуществляющей многократные перекрытия интервалов горизонтов, интерпретация результатов НВСП, выполненного из небольшого числа удаленных пунктов возбуждения, предполагает более тщательное и полное извлечение информации из каждой сейсмограммы[2]. Для этого в первую очередь необходимо получать изображения среды с правильной геометрией расположения глубинных точек. Получение 3D информации при работах НВСП сложная задача, решение которой не ограничивается применением алгоритмов 3D миграции, а требует комплексного подхода, заключающегося в проектировании системы наблюдений на скважине, применении алгоритмов 3D миграции при трансформации сейсмограмм во временные и глубинные разрезы и использовании пространственной интерпретации полученных данных. Проектирование работ НВСП заключается в определении оптимального положения пунктов возбуждения и пунктов приема, исходя из имеющейся априорной информации о кривизне скважины и наклонах отражающих горизонтов. Оптимальным положением будет считаться такое, которое позволит решить поставленную геологическую задачу посредством отработки НВСП из минимального количества пунктов возбуждения. Геологические задачи могут быть как структурными (уточнение положения горизонтов в заданных направлениях), так и литологическими (выявление изменения акустических свойств горных пород вдоль горизонта). Методика проектирования системы наблюдений состоит в тотальном расчете точек отражения и годографов отраженных волн от пунктов возбуждения, заданных по квадратной сети, охватывающей все возможные удаления ПВ от скважины. Из этой совокупности для отработки скважины отбираются пары ПВ и ПП по критериям, оптимальным для решения поставленной задачи. Таким критерием, например, может служить максимальная площадь прослеживания целевого горизонта в заданном направлении. Алгоритм 3D дискретной лучевой миграции реализует принцип Ферма для многослойной пластовой модели с границами между пластами, заданными, в общем случае, искривленными поверхностями. Скорости между пластами задаются трехосным эллипсоидом анизотропии. Особенность алгоритма в том, что поверхности определяются отдельными точками с площадными координатами, заданными по прямоугольной сетке. Точность и скорость расчета лучей зависит от расстояния между точками. Для каждой поверхности рассчитываются падающие и отраженные лучи, а точки отражения определяются по суммарному минимальному или экстремальному времени падения-отражения лучей. Расчетная схема универсальна и позволяет рассчитывать годографы монотипных отраженных, обменных, головных и дифрагированных волн (Рис.1). Алгоритм одинаково надежен как в 2D, так и в 3D варианте и применяется для обработки реальных данных в программных комплексах VimSeis 2D и VimSeis 3D. К недостаткам алгоритма относятся большое время счета и сложность задания модели для градиентных сред (слой с градиентом скорости разбивается на несколько дополнительных пластов). Начальная стадия обработки 3-х компонентных сейсмограмм НВСП проводится традиционно и включает процедуры разделения XYZ компонент, деконволюцию, полосовую и веерную фильтрации с целью получения сейсмограмм c выделенными отраженными продольными PP и обменными PS волнами. Получение мигрированных глубинных разрезов проводится по отдельности для продольных и обменных волн. Миграция выполняется посредством расчета пространственного положения точек и времен отражения от промежуточных горизонтов, с последующей интерполяцией значений между горизонтами. Рассчитанные координаты и времена отражения определяются и сохраняются для каждого отсчета исходной трассы. Отличительной особенностью является то, что сама исходная трасса при миграции не изменяется, а представляется в параметрической форме Аi(t); где t - текущее время исходной трассы (номер отсчета), а Ai - значения функций (амплитуды сигнала, координат точек отражения и вертикального времени). Параметрическая форма представления трассы при миграции ВСП является предпочтительной по многим соображениям: во первых, это естественная форма описания поверхностей в пространстве, а во вторых, результат одного расчета может быть представлен в разных видах. Кроме того, при изменении исходных сейсмограмм (например, опробование разных вариантов деконволюции или фильтрации) нет необходимости выполнять миграционное преобразование, если сама скоростная модель не изменяется. Определение пластовой модели среды осуществляется интерактивно, посредством пробных миграционных преобразований, до совпадения времен прослеживания расчетных и реальных годографов прямых и отраженных волн. Способ представления результатов обработки для их последующей интерпретации зависит от распределения точек отражения в пространстве. В отдельных случаях результаты 3D обработки могут быть представлены традиционным способом в виде плоских сейсмических разрезов с площадными координатами трасс, располагающимися по линии, проходящей через точки отражения от целевого отражающего горизонта. В общем случае трансформированные сейсмограммы НВСП, полученные от разных пунктов возбуждения, изображаются в виде трехмерных поверхностей (Рис.2). Интерпретация полученных сейсмограмм состоит в пространственном прослеживании особенностей сейсмического поля отраженных волн и построении по этим данным геологических разрезов и карт отражающих горизонтов. Имеющиеся сейсмические разрезы МОГТ представляются в единой со скважинными данными системе координат и изображаются совместно с ними посредством процедур 3D графики. Таким образом, работы НВСП, выполненные в 3D варианте, позволяют получать более точную информацию, которая может быть использована как для интерпретации и уточнения результатов наземной сейсморазведки, так и самостоятельно, например, для определения пространственного положения объекта бурения и искривления скважины в заданном направлении[3]. Рис.1 А) Для расчета годографов отраженных волн. Б) Для расчета годографов головных волн. В) Для расчета годографов волн дифракции Рис.2 А) Поверхности распределения точек отражения Б) Пространственная трансформация трасс В) Изображение сейсмограмм в цвете Литература: 1. Гальперин Е.И. Вертикальное сейсмическое профилирование (опыт и результаты). М.: Наука. 1994г. 2. Vladimir Stenin, Alik Kasimov, Veniamin Redekop and Anatoli Tikhonov. Borehole vicinity characterization using 3C-3D VSP. Exp.Abst. SEG 2003, Dallas. 3. Редекоп В.А., Редекоп И.А., Каширских М.Ф., Карнаухов С.М. Геофизический способ поисков и разведки залежей углеводородов. Патент РФ №2123195. Заявл. 05.06.1998г