113x
advertisement

УДК 681.3
ТЕОРЕТИКО-МНОЖЕСТВЕННЫЙ ПОДХОД К ЗАДАЧЕ МОДЕЛИРОВАНИЯ
НЕСТАЦИОНАРНЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ПРОИЗВОДСТВА
Г.С.Володченко, проф.; А.И.Новгородцев, ст.преп.; А.Д.Полонский, доц.
Интенсивное развитие различных отраслей народного хозяйства неразрывно связано с
совершенствованием и созданием эффективных систем управления, позволяющих автоматизировать многие
технологические процессы. При решении проблем автоматизации возникают разнообразные задачи
математического моделирования, позволяющие получить адекватное отображение наиболее существенных
сторон исследуемого технологического процесса производства с точностью, которая необходима для
практических целей.
Однако влияние различного рода внешних факторов и недостаточность априорной информации для
определения физических закономерностей, лежащих в основе динамики исследуемого технологического
процесса производства, требует решения задачи математического моделирования в классе нестационарных
динамических систем.
В настоящей работе предлагается метод математического моделирования нестационарных
технологических процессов производства (НТПП) на основе теоретико-множественного подхода [1].
Предлагаемый метод математического моделирования базируется на представлении исследуемого НТПП в
виде «набора» отдельных элементов множеств, взаимосвязанных между собой пропорциональными и
интегральными отображениями, характеризующих как количественные, так и качественные показатели.
Определение 1 Под пропорциональным отображением понимается такое отображение информации о
состоянии НТПП, при котором происходят только количественные его изменения с соответствующими
коэффициентами.
Определение 2 Под интегральным отображением понимается такое отображение информации о
состоянии НТПП, при котором происходят как количественные, так и качественные изменения его
состояния под действием физических сил или работ, затраченных на выполнение той или иной технической
операции.
Рассмотрим класс НТПП, которые могут быть представлены в теоретико-множественной форме:
множеством возможных состояний:
M={m0,m1,m2,n0,n1,n2};
(1)
множеством требований, предъявляемых к исследуемому НТПП:
V0={V1,V2};
(2)
множеством технологических операций, определяемых согласно методам математической физики,
линейными операторами:
Lm={fm1,fm2};
Lm={fn-1,fn2};
(3)
множеством пропорциональных отображений элементов множеств состояния (1):
A[am10(t)]: m1 m0;
A[am20(t)]: m2 m0;
A[an10(t)]: n1 n0;
(4)
B[bm10(t)]: V1 m0;
B[bm20(t)]: m2 n0;
B[bn10(t)]: V2 n0,
где А и В - символы пропорциональных отображений элементов множеств в исходное состояние; aijk(t) и
bijk(t)- весовые коэффициенты этих множеств, являющиеся функциями времени t;
множествами интегральных отображений элементов множества исходного состояния (1):
L[fm1]:
L[fm2]:
L[fn1]:
L[fn2]:
m0m1;
m1m2;
n0n1;
n1n2.
(5)
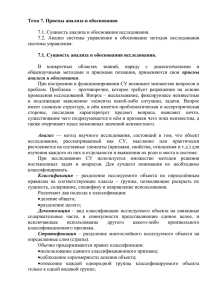
Пользуясь множествами и их отображениями, можно построить направленный динамический граф
(рис.1) в виде некоторой топологической фигуры, в которой вершины, несущие в себе всю информацию об
исходном состоянии исследуемого НТПП, моделируются сумматорами.
Рисунок 1
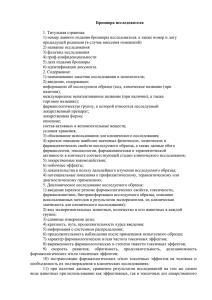
Рисунок 2
Учитывая
то,
что
интегральные
отображения (5) согласно определению 2 суть линейные операторы, обеспечивающие
интегральный процесс перехода состояний
исследуемого НТПП из одного в другое, дуги
направленного динамического графа будем
моделировать интеграторами.
Согласно
определению
1
дуги
пропорциональных
отображений
(4)
моделируются соответствующими коэффициентами.
На рис.2 приведена структурная схема в переменных состояния, построенная на основе направленного
дина-мического графа (рис. 1), которая по сути представляет собой математическую модель исследуемого
НТПП в пространстве состояний.
Тогда, обозначив
m2 x m ( t ) ;
n2 x2 ( t ) ;
V1 Vm ( t ) ;
V2 Vn ( t )
из схемы в переменных состояния, имеем
m1 x m ( t ) ;
m0 xm ( t ) n ( t ) ;
n1 x n ( t ) ;
n 2 xn ( t ) ,
следовательно, можно записать систему дифференциальных уравнений:
(6)
xm ( t ) am10 ( t ) x m ( t ) am20 ( t ) x m ( t ) bm10 ( t ) Vm ( t ) ;
xn ( t ) an10 ( t ) x n ( t ) an 20 ( t ) x n ( t ) bm20 ( t ) x m ( t ) bn 20 ( t ) Vn ( t ) .
Разрешив полученную систему дифференциальных уравнений (6) относительно старших производных,
введя новую переменную х(t) и обозначив
x m ( t ) x 1( t ) ;
xn ( t ) x3( t ) ;
x m ( t ) x 2 ( t ) ;
xn ( t ) x n ( t ) ,
тогда математическая модель исследуемого НТПП в форме Коши примет вид
x1( t ) x 2 ( t ) ;
x2 ( t ) am20 ( t ) x1( t ) am10 ( t ) x 2 ( t ) bm10 Vm ( t ) ;
x 3 ( t ) x 4 ( t ) ;
x 4 ( t ) bm20 ( t ) x1( t ) an 20 ( t ) x 3 ( t ) an10 ( t ) x 4 ( t ) bn 20 ( t ) Vn ( t ) .
(7)
Система дифференциальных уравнений (7) в векторно-матричной форме с учетом вектора измерений
X ( t ) A( t ) X ( t ) B( t ) V0 ( t ) ;
Z(t)=HX(t),
(8)
где X(t)=[x1(t),x2(t),x3(t),x4(t)] T- транспонированный вектор состояния исследуемого НТПП;
0
a ( t )
m 20
A( t )
0
b
m 20 ( t )
1
am10 ( t )
0
0
0
0
0
an 20 ( t )
0
1
1
an 10 ( t )
нестационарная динамическая матрица;
B(t)=[bm10(t),bn20(t)] T- нестационарный транспонированный вектор воздействия;
V0(t)=diag[Vm(t),Vn(t)] - матрица воздействия на процесс;
Z - вектор измерений;
H=[hk] - матрица измерений k1,
hk{0,1};k=1,4.
Таким образом, математическая модель исследуемого НТПП (8) позволяет использовать известные
методы анализа и синтеза динамических процессов [2,3] для построения систем оптимального контроля и
управления нестационарными производственными процессами.
Проведенный анализ позволяет сделать вывод о возможности применения теоретико-множественного
подхода к задачам математического моделирования, анализу и синтезу контроля и управления
технологическими процессами производства с применением средств вычислительной техники.
SUMMARY
The mathematical model of non-stationary technological process is given for one class production. It is based on theoretical plural forms .
СПИСОК ЛИТЕРАТУРЫ
1. Оре О. Теория графов.- М.: Наука, 1980.- 190 с.
2. Пешель М. Моделирование сигналов и систем.- М.: Мир, 1981.- 300 с.
3. Брайсон А., Хо Ю-ши. Прикладная теория оптимального управления.
4. Оптимальная оценка и управление.- М.: Мир, 1972.- 544 с.
Поступила в редколлегию 19 ноября 1996 г.