Лекция №2 Тех Мех_2015
реклама

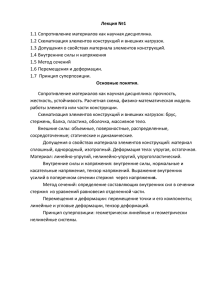
Тема 2 Основные понятия. Лекция №2 2.1 Сопротивление материалов как научная дисциплина. 2.2 Схематизация элементов конструкций и внешних нагрузок. 2.3 Допущения о свойствах материала элементов конструкций. 2.4 Внутренние силы и напряжения. 2.5 Силовые факторы в поперечном сечении стержня и их выражение через напряжения. 2.6 Метод сечений 2.7 Перемещения и деформации. 2.8 Принцип суперпозиции. Основные понятия. Сопротивление материалов как научная дисциплина: прочность, жесткость, устойчивость. Расчетная схема, физико-математическая модель работы элемента или части конструкции. Схематизация элементов конструкций и внешних нагрузок: брус, стержень, балка, пластина, оболочка, массивное тело. Внешние силы: объемные, поверхностные, распределенные, сосредоточенные; статические и динамические. Допущения о свойствах материала элементов конструкций: материал сплошный, однородный, изотропный. Деформация тела: упругая, остаточная. Материал: линейноупругий, нелинейно-упругий, упругопластический. Внутренние силы и напряжения: внутренние силы, нормальные и касательные напряжения, тензор напряжений. Выражение внутренних усилий в поперечном сечении стержня через напряжения. Метод сечений: определение составляющих внутренних сил в сечении стержня из уравнений равновесия отделенной части. Перемещения и деформации: перемещение точки и его компоненты; линейные и угловые деформации, тензор деформаций. Принцип суперпозиции: геометрически линейные и геометрически нелинейные системы. 2.1 Сопротивление материалов как научная дисциплина. Дисциплины прочностного цикла: сопротивление материалов, теория упругости, строительная механика объединены общим названием «Механика твердого деформируемого тела». Сопротивление материалов - это наука о прочности, жесткости и устойчивости элементов инженерных конструкций. Конструкцией принято называть механическую систему геометрически неизменяемых элементов, относительное перемещение точек которой возможно лишь в результате ее деформации. Под прочностью конструкций понимают их способность сопротивляться разрушению – разделению на части, а также необратимому изменению формы под действием внешних нагрузок. Деформация – это изменение относительного положения частиц тела, связанное с их перемещением. Жесткость – это способность тела или конструкции сопротивляться возникновению деформации. Устойчивость упругой системы называют ее свойство возвращаться в состояние равновесия после малых отклонений от этого состояния. Упругость – это свойство материала полностью восстанавливать геометрическую форму и размеры тела после снятия внешней нагрузки. Пластичность – это свойство твердых тел изменять свою форму и размеры под действием внешних нагрузок и сохранять ее после снятия этих нагрузок. Причем изменение формы тела (деформирование) зависит только от приложенной внешней нагрузки и не происходит само по себе с течением времени. Ползучесть - это свойство твердых тел деформироваться под воздействием постоянной нагрузки (деформации растут со временем). Строительной механикой называют науку о методах расчета сооружений на прочность, жесткость и устойчивость. 2.2 Схематизация элементов конструкций и внешних нагрузок. Моделью конструкции принято называть вспомогательный объект, заменяющий реальную конструкцию, представленную в наиболее общем виде. Сопротивление материалов использует расчетные схемы. Расчетная схема – это упрощенное изображение реальной конструкции, которое освобождено от ее несущественных, второстепенных особенностей и которое принимается для математического описания и расчета. К числу основных типов элементов, на которые в расчетной схеме подразделяется целая конструкция, относятся: брус, стержень, пластина, оболочка, массивное тело. Рис. 2.1 Основные типы элементов конструкций Брус – это твердое тело, полученное перемещение плоской фигуры вдоль направляющей так, что его длина значительно больше двух других размеров. Стержнем называется прямолинейный брус, который работает на растяжение (сжатие) (l-длина существенно превышает характерные размеры поперечного сечения h,b). Геометрическое место точек, являющихся центрами тяжести поперечных сечений, будем называть осью стержня. Пластина – это тело, у которого толщина существенно меньше его размеров a и b в плане. Естественно искривленная пластина (кривая до загружения) называется оболочкой. Массивное тело характерно тем, что все его размеры a ,b, и c имеют один порядок. Рис. 2.2 Примеры стержневых конструкций. Балкой называется брус, который испытывает изгиб в качестве основного способа нагружения. Фермой называется совокупность стержней, соединенных шарнирно. Рама – это совокупность балок, жестко соединенных между собой. Внешние нагрузки подразделяют на сосредоточенные и распределенные. Рис 2.3 Схематизация работы подкрановой балки. Силу или момент, которые условно считают приложенными в точке, называют сосредоточенными. Нагрузка, постоянная или очень медленно изменяющаяся во времени, когда скоростями и ускорениями возникающего движения можем пренебречь, называется статической. Рис 2.4 Объемная, поверхностная и распределенная нагрузки. Быстро изменяющуюся нагрузку называют динамической, расчет с учетом возникающего колебательного движения – динамическим расчетом. 2.3 Допущения о свойствах материала элементов конструкций. В сопротивлении материалов используют условный материал, наделенный определенными идеализированными свойствами. На рис. 2.5 изображены три характерные диаграммы деформирования, связывающие значения силы F и деформации l при нагружении и разгрузке. Рис. 2.5 Характерные диаграммы деформирования материала Полная деформация l l упр lпл складывается из двух составляющих упругой и пластической. Часть суммарной деформации, исчезающей после снятия нагрузки, называется упругой. Деформация, остающаяся после разгрузки, называется остаточной или пластической. Упруго - пластический материал – это материал проявляющий упругие и пластические свойства. Материал, в котором возникают только упругие деформации, называется идеальноупругим. Если диаграмма деформирования выражена нелинейной зависимостью, то материал называется нелинейно-упругим, если линейной зависимостью, то линейноупругим. Материал элементов конструкций будем в дальнейшем считать сплошным, однородным, изотропным и линейно упругим. Свойство сплошность означает, что материал непрерывно заполняет весь объем элемента конструкции. Свойство однородности означает, что весь объем материала обладает одинаковыми механическими свойствами. Материал называется изотропным, если его механические свойства по всем направлениям одинаковые (в противном случае анизотропным). Соответствие условного материала реальным материалам достигается тем, что в расчет элементов конструкций вводятся экспериментально получаемые усредненные количественные характеристики механических свойств материалов. 2.4 Внутренние силы и напряжения Внутренние силы – приращение сил взаимодействия между частицами тела, возникающих при его нагружении. Рис. 2.6 Нормальные и касательные напряжения в точке Тело рассечено плоскостью (рис.2.6 а ) и в этом сечении в рассматриваемой точке М выделена малая площадка Rn , её ориентация в пространстве определяется нормалью n. Равнодействующую силу на площадке An обозначим через Rn . Среднюю интенсивность на площадке определим по формуле pcp Rn . Интенсивность An внутренних сил в точке определим как предел Rn (2.1) A0 An Интенсивность внутренних сил p n передающихся в точке через выделенную площадку, pn lim называется напряжением на данной площадке. Размерность напряжения Па н . м2 Вектор p n определяет полное напряжение на данной площадке. Разложим его на составляющие (рис.2.6 б) так, что pn n n , где n и n –соответственно нормальное и касательное напряжения на площадке с нормалью n. При анализе напряжений в окрестности рассматриваемой точки М (рис.2.6 в) выделяют бесконечно малый элемент в форме параллелепипеда со сторонами dx , dy , dz (проводят 6 - сечений). Полные напряжения, действующие на его гранях, раскладывают на нормальное и два касательных напряжения. Совокупность напряжений, действующих на гранях, представляют в виде матрицы (таблицы), которую называют тензор напряжений 2 2 2 x yx zx T xy y zy xz yz z (2.2) xy , показывает, что оно действует на Первый индекс у напряжения, например площадке с нормалью, параллельной оси x , а второй показывает, что вектор напряжений параллелен оси у. У нормального напряжения оба индекса совпадают поэтому ставится один индекс. 2.5 Силовые факторы в поперечном сечении стержня и их выражение через напряжения. Рассмотрим поперечное сечение стержня нагруженного стержня (рис 2.7 ,а). Внутренние силы, распределенные по сечению, приведем к главному вектору R ,приложенному в центре тяжести сечения, и главному моменту M. Далее разложим их на шесть компонент: три силы N , Qy , Qz и три момента M x , M y , M z , называемые внутренними усилиями в поперечном сечении. Рис. 2.7 Внутренние усилия и напряжения в поперечном сечении стержня. Компоненты главного вектора и главного момента внутренних сил, распределенных по сечению, называются внутренними усилиями в сечении ( N продольная сила; Qy , Qz - поперечные силы, M y , M z -изгибающие моменты, M x крутящий момент). Выразим внутренние усилия через напряжения, действующие в поперечном сечении, предполагая их известными в каждой точке (рис. 2.7,б) Выражение внутренних усилий через напряжения. N xdA Q y xydA Qz xzdA A A A M z y xdA M y z xdA A A M x ( xyz xzy )dA A (2.3) 2.6 Метод сечений При действии на тело внешних сил оно деформируется. Следовательно, меняется взаимное расположение частиц тела; в результате этого возникают дополнительные силы взаимодействия между частицами. Эти силы взаимодействия в деформированном теле есть внутренние усилия. Необходимо уметь определять значения и направления внутренних усилий через внешние силы, действующие на тело. Для этого используется метод сечений. Рис. 2.8 Определение внутренних усилий методом сечений. Уравнения равновесия для оставшейся части стержня. X 0 , Y 0 , ост.ч. ост.ч. Z 0 ост.ч. M x 0, M y 0 , M z 0 ост.ч. ост.ч. (2.4) ост.ч. Из уравнений равновесия определяем внутренние усилия в сечении a-a. 2.7 Перемещения и деформации. Под действием внешних сил тело деформируется, т.е. изменяет свои размеры и форму (рис.2.9). Некоторая произвольная точка M переходит в новое положение M1. Полное перемещение MM1 будем разлагать на компоненты u, v, w , параллельные осям координат. Рис 2.9 Полное перемещение точки и его компоненты. Но перемещение данной точки еще не характеризует степень деформирования элемента материала у этой точки (пример: человек висит на канате, часть каната ниже захвата не деформируется). Введем понятие деформаций в точке как количественную меру деформирования материала в её окрестности. Выделим в окрестности т. М элементарный параллелепипед dx dy dz (рис. 2.10). За счет деформации длины его ребер получат удлинение dx, dy, dz . Рис 2.10 Линейная и угловая деформации элемента материала. Линейные относительные деформации в точке определятся так ( 10 ): 3 x dx dx y dy dy z dz dz (2.5) Кроме линейных деформаций возникают угловые деформации или углы сдвига, представляющие малые изменения первоначально прямых углов параллелепипеда (например, в плоскости xy это будет xy ). Углы сдвига весьма малы и имеют порядок 10 4 10 3 . Введенные относительные деформации в точке сведем в матрицу x 1 T xy 2 1 2 xz 1 xy 2 y 1 yz 2 1 xz 2 1 yz . 2 z (2.6) Величины (2.6) количественно определяют деформацию материала в окрестности точки и составляют тензор деформаций. 2.8 Принцип суперпозиции. Систему, в которой внутренние усилия, напряжения, деформации и перемещения прямо пропорциональны действующей нагрузке, называют линейно деформируемой (материал работает как линейно-упругий). Кроме того, перемещения в конструкции должны быть достаточно малыми, чтобы изменения ее размеров и формы, возникающие вследствие деформации, можно было не учитывать в расчетной схеме (при составлении уравнений равновесия). Такие системы называются геометрически линейными. Рис.2.11 Влияние перемещения узла на усилие в стержне На рис.2.11 показана геометрически нелинейная система F F . Если пренебречь деформацией стержней и считать 2 * sin( ) 2 * sin( ) F 0 , то N . 2 * sin( ) N Принцип суперпозиции. Результат действия группы сил равен сумме (алгебраической или геометрической) результатов, полученных от действия каждой силы в отдельности.