Искаков Михаил Борисович
advertisement

Захаров Алексей Владимирович
Национальный исследовательский университет Высшая школа экономики, Москва
Искаков Алексей Борисович
Институт проблем управления им. В.А.Трапезникова РАН, Москва
Искаков Михаил Борисович
Институт проблем управления им. В.А.Трапезникова РАН, Москва
Решение в безопасных стратегиях задачи борьбы за ренту Таллока
Хорошо известно, что в игре борьбы за ренту Таллока с двумя игроками нет
равновесия Нэша при параметре функции успеха >2. В докладе данная задача
исследуется при помощи концепции равновесия в безопасных стратегиях (РБС).
РБС определяется двумя условиями: 1) Никто не может увеличить свой
выигрыш, уменьшив выигрыш другого игрока. 2) Никто не может увеличить
свой выигрыш без угрозы потерять больше, чем приобретает. Показано, что
РБС всегда существует. Кроме того, показано, что при >2 имеющееся РБС
более эффективно, чем равновесие в смешанных стратегиях.
1. Введение
Многие экономические и политические взаимодействия моделируются как
соревнование (конкурс). Соревнование возникает, когда несколько игроков претендуют на
владение некоторым ресурсом, и когда вероятность получения ресурса одним участником
(или доля ресурса) является возрастающей функцией от его усилий (стратегии) и
убывающей от усилий других игроков. Классический пример соревнования – модель
борьбы за ренту [Tullok 1969,1980], в которой фирмы определяют свои расхода на
лоббирование для того, чтобы получить монопольный статус производителя или
импортера некоторого блага. Другие примеры соревнования включают модели
распределения ресурса [Бурков, Кондратьев, 1981], спорта [Szymanski 2003], рекламы
[Schmalensee 1972], войн [Garfinkel, Skaperdas 2006], судопроизводства [Warneryd 2000,
Baye, Kovenock, de Vries 2005, Osborne 2002], экономического роста [Polterovich 2001],
многопартийных выборов, маркетинга и т.д. Перераспределение через механизмы
конкурса составляет значительную долю национального дохода во всех обществах и
странах, оцениваемую в 7-15% ВВП [Krueger 1974, Posner 1975, Cowling, Mueller 1978,
Laband, Sophocleus 1988].
Модель соревнования за ренту включает определение функции успеха игрока в
соревновании, переводящую усилие всех игроков в вероятность, с которой данный игрок
получает ресурс. Аксиоматизации таких функций была проведена в [Skaperdas 1996]. Там
принимаются следующие аксиомы: монотонность вероятности успеха по собственным
усилиям; независимость от посторонних альтернатив (пропорция вероятностей успеха
двух игроков не зависит от стратегий всех других игроков); анонимность (вероятность
успеха игроков не зависит от их идентичности); однородность (умножение на константу
усилий всех игроков не изменяет результат игры). Было доказано, что любая функция,
удовлетворяющая этим аксиомам имеет вид:
x
pi n i
( x 0).
(1)
xj
j 1
1
Здесь pi – вероятность успеха игрока i, а xi – усилие игрока. Для удобства функция
1
успеха доопределяется в точке xi 0, i 1,..., n значением pi . Конкретный
n
конкурсный механизм определяется параметром α. При больших α игрок, прилагающий
больше усилий, имеет большее преимущество. При 1 для всех игроков вероятность
получения премии (ресурса) пропорциональна их усилиям; при игрок
приложивший наибольшие усилия получает премию с вероятностью 1. Такие функции
успеха в соревновании широко применяются, начиная с работы [Tullok 1980]. Целевые
функции в игровой постановке задачи соревнования за ренту принимаются как:
(2)
U i Ri pi xi .
Здесь Ri – субъективная оценка игроком ценности успеха. Таким образом
поставленная игровая задача, и только она, удовлетворяет перечисленным выше
аксиомам, исключая анонимность [Clark, Riis 1996]. Эта модель является общепринятой в
теории конкурса. Расширения модели включают: неодновременный порядок действий
[Baye, Shin 1999], групповые преимущества [Nitzan 1991, Baik, Lee 1997], бюджетные и
другие ограничения [Che, Gail 1997, Schoonbeek, Kooperman 1997], неопределенное
количество игроков [Epstein, Nitzan 2002, Lim, Matros 2009], неопределенный размер
премии [Leitzel, Alexeev 1995] и т.д. Центральным вопросом модели соревнования за
ренту рассматирваетсяется вопрос диссипации ренты: являются ли совокупные усилия
игроков меньшими или равными величине премии, за которую идет соревнование? В игре
с целевыми функциями (2) диссипация обычно не достигает полноты (равенства), при
существовании равновесия.
Основная теоретическая проблема модели – то, что существование равновесия в
чистых стратегиях не гарантируется при 1 . Например, для симметричного случая
n
( Ri R ) равновесие в чистых стратегиях существует если, и только если
. Эта
n 1
трудность возникает потому, что функция полезности (2) является вогнутой только если
1 . Для симметричного соревнования за ренту двух игроков [Baye, Kovenock, de Vries
1994], решая игру в смешанных стратегиях, показали, что при 2 диссипация ренты
полна (то есть, равна 1, это означает, что совокупные усилия игроков равны величине
премии). Тем не менее, аналитический вид равновесия в смешанных стратегиях не был
найден. Для несимметричного соревнования или соревнования более, чем двух игроков,
насколько известно, нет работ, посвященных решению задачи в смешанных стратегиях.
2. Равновесие в безопасных стратегиях
Теперь приведем метод, которым решается задача (2), и введем соответствующие
понятия. Для решения используется понятие равновесия в безопасных стратегиях (РБС),
предложенное в [Искаков 2005]. Это обобщение равновесия Нэша, в котором вводится
дополнительный критерий безопасности выбираемых стратегий, помимо максимизации
своей целевой функции. Здесь требуется стабильность равновесного профиля только со
стороны таких индивидуальных отклонений, которые не могут быть использованы
другими игроками против отклоняющегося. Далее приводятся определения РБС из
[Iskakov, Iskakov 2012 2].
Базовым понятием, на котором построена вся конструкция, является определение
угрозы. Пусть задана произвольная игра ( X i , ui , i N ) .
Определение 1. Угрозой игрока j игроку i ( j i ) называется пара профилей
{x, ( xj , x j )} такая что: u j ( x j , x j ) u j ( x) и u i ( x j , x j ) u i ( x) . При этом профиль x
называется содержащим угрозу, а профиль ( xj , x j ) , также как и стратегия x j ,
2
называются угрожающими игроку i со стороны игрока j.
Определение 2. Стратегия xi игрока i называется безопасной стратегией при
заданной обстановке xi , если профиль x не содержит угроз игроку i. Профиль стратегий
x называется безопасным профилем, если все его стратегии безопасны.
Определение 3. Безопасным отклонением игрока i от профиля x называется
стратегия xi такая, что ui ( xi, xi ) ui ( x) и ui ( xi, xj , xij ) ui ( x) для любой угрозы
{( xi, xi ), ( xi, xj , xij )} игрока j игроку i.
Следует отметить, что отклонение является безопасным только относительно
профиля. Сам профиль ( xi, xi ) может содержать в себе угрозы игроку i, но они не должны
опускать его выигрыш ниже, чем в профиле x.
Определение 4. Безопасный профиль стратегий называется равновесием в
безопасных стратегиях, если ни один игрок не может увеличить свой выигрыш
безопасным отклонением.
Таким образом, в определении РБС содержится два условия: в профиле не должно
содержаться угроз, в нем не должно содержаться возможностей безопасных отклонений.
Или, другими словами: 1) Никто не может увеличить свой выигрыш, уменьшив выигрыш
другого игрока. 2) Никто не может увеличить свой выигрыш без угрозы потерять больше,
чем приобретает. Сразу после определений можно сформулировать важнейшее свойство
РБС.
Утверждение 1. Любое равновесие Нэша является равновесием в безопасных
стратегиях.
Но для некоторых игр, например для антагонистических, верно и обратное – любое
РБС является равновесием Нэша. Действительно, допустим, что в антагонистической игре
есть РБС, не являющееся равновесием Нэша. Тогда хотя бы один из игроков может
отклонением увеличить свой выигрыш и уменьшить выигрыш соперника. Значит профиль
не безопасен и не является РБС.
Утверждение 1 проясняет вопрос о существовании РБС и его месте в соотношении с
известной концепцией решения – равновесием Нэша. РБС – более широкое понятие. Там,
где есть равновесие Нэша, РБС с ним совпадает. Но для некоторых важных задач,
например, задачи Хотеллинга [Iskakov, Iskakov 2012 1] и Таллока, где основной
теоретической проблемой является отсутствие равновесий Нэша при некоторых значениях
параметров, РБС не только всегда существует, но и имеет интересную содержательную
интерпретацию.
Как иллюстрацию, рассмотрим пример матричной игры.
L
C
R
U 0,0 0,4
0,3
C 4,0 2,2
1,1
D 3,0 1,1 2,2
В этой игре для первого игрока имеется единственная угроза (C,L)→(C,C), а для
второго – (U,C)→(C,C). Игра содержит три РБС: (U,R), (D,L), (C,C). Последнее из них
является равновесием Нэша. Три равновесия неравноценны для игроков. Равновесие Нэша
(C,C) дает игрокам равные выигрыши. В (U,R) выигрыш получает второй игрок, который
воздерживается от получения большего выигрыша в (U,C), так как там содержится угроза
перехода в (C,C). Третье РБС (D,L) – симметричное, выигрыш получает первый игрок, а
второй – 0. Этот пример показывает, что даже при наличии равновесия Нэша, которое на
первый взгляд исчерпывает исследование и решение задачи, могут существовать
дополнительные РБС, которые существенно изменяют общую картину игры. В данном
случае имеется три устойчивых, неравноценных для игроков профиля. В какое из них
«сядет» игра не предопределено, и в то же время каждый игрок заинтересован, чтобы
3
реализовалось выгодное именно ему равновесие (так же, например, как в известной игре
«семейный спор»). Данный пример также является матричной иллюстрацией для модели
борьбы за ренту Таллока, что будет показано ниже.
В равновесии Нэша стратегия каждого игрока является наилучшим ответом на
стратегии других игроков. Введем аналогичное для случая РБС понятие наилучшего
безопасного ответа.
Определение 5. Стратегия xi игрока i называется наилучшим безопасным ответом
на стратегии xi других игроков, если игрок i не имеет более выгодных безопасных
стратегий при окружении xi . Профиль x* называется профилем наилучших
безопасных стратегий (НБС), если стратегии всех игроков в нем являются наилучшими
безопасными ответами на окружение.
Можно сформулировать утверждение:
Утверждение 2. РБС всегда является профилем наилучших безопасных стратегий.
Профиль наилучших безопасных стратегий может не быть РБС.
Множество профилей наилучших безопасных ответов может быть полезно, так как
утверждение 2 дает возможность достаточно удобного метода поиска РБС во многих
играх. Сначала ищутся профили наилучших безопасных стратегий, что является более
простой задачей, чем применение такой сложной конструкции, как определение РБС. А
потом, в уже найденном множестве для профилей проверяются условия на существование
возможности их улучшения безопасными отклонениями. Как показал опыт решенных
задач, именно эта проверка оказывается самой технически сложной частью исследования.
При использовании этого метода удобно использовать функцию наилучших безопасных
ответов игрока на окружение BS i ( xi ) .
3. Игра соревнования за ренту
При исследовании игры сначала более подробно рассмотрим равновесие Нэша и
условие его существования. Пусть имеется n игроков с одинаковой ценностью ресурса
Ri 1 . Тогда функцией полезности игрока будет:
Ui
xi
n
x
j 1
xi
( x 0).
(3)
j
2U i
0 . Функции полезности выпуклы и однопиковы. Наилучший
xi2
U i
0 . Решая это уравнение, введем следующие
ответ игрока i определяется условием
xi
функции:
Если 0 1, то
1
x
( xi ) i 2 xi 2 4xi
2
1
xi
2 xi 2 4xi
2
( xi )
1
2 1
, max 0,
xi ,
4
4
1
, 0 xi
(4)
.
4
xi i ( xˆi ) ,
Тогда точка максимума x̂i целевой функции U i определяется уравнением ~
или:
4
1
1 ~ ~
( ) ( xi ), xi ,
4 ~
xˆi 1 ( ~
xi )
xi xj .
1 ~
~
i j
( ) ( xi ), xi ,
4
(5)
Рис. 1. Три случая поведения целевой функции
Если 1 , то возможны три случая поведения целевой функции U i , показанные на
рис. 1, в зависимости от значения ~
xi . В общем случае целевая функция может быть
двупиковой или убывающей. Первый пик достигается при xi 0 , второй пик
определяется условием
U i
2U i
0,
0 . Положение второго пика определяется
xi
xi2
1
xi x ( 1)
формулой (5). При ~
1
xi x целевая
правый пик выше (рис. 1-a). При ~
функция достигает максимума U i 0 в обоих своих пиках (рис. 1-b). При ~
xi x
наилучшим ответом игрока i будет не участвовать в соревновании xi 0 (рис. 1-c).
Используя обозначения (4-5), функцию наилучшего ответа игрока i в игре (3) можно
записать:
1 ( ~
xi ), 0 1,
1 ~
~
~
BRi ( xi ) ( xi ),
1,
xi x ,
(6)
~
0,
1,
xi x.
n
, эта система имеет в качестве решения симметричное равновесие
n 1
n 1
Нэша x* 2 , найденное в [Tullok 1980]. Несложно показать, что других равновесий
n
n
Нэша нет. При
симметричных равновесий Нэша не существует.
n 1
Когда
5
Рис. 2. Функции наилучшего безопасного ответа
Левая часть рис. 2 показывает наилучшие ответы игрока i (вертикальная ось) как
функцию от ~
xi (горизонтальная ось) для 0.25, 0.5, 0.75, 1. Правая часть рис. 2
показывает наилучшие ответы для 1, 1.25, 1.5, 2, 2.5, 3 . Для случая 2 можно
видеть, что функции наилучшего ответа двух игроков пересекаются в точке разрыва
x1 x2 0.5 , а для 2 симметричного равновесия Нэша больше не существует.
4. Решение игры соревнования за ренту в безопасных стратегиях
В этом разделе представлено решение задачи борьбы за ренту двух игроков в
безопасных стратегиях. Схема нахождения решения следующая: в теореме 1 находится
множество безопасных профилей игры, теорема 2 проверяет условия РБС для всех
граничных точек этого множества.
Теорема 1. При 0 1 множество безопасных профилей ( x1 , x2 ) в игре
соревнования за ренту (3) двух игроков определяется как:
{ 1 ( x2 ) x1 , 1 ( x1 ) x2 } .
(7)
При 1 оно определяется как:
{ 1 ( x2 ) x1 c, 1 ( x1 ) x2 c} {max{ x1 , x2 } c}
(8)
{0 x1 1 ( x2 ), b x2 c} {0 x2 1 ( x1 ), b x1 c}.
Здесь 1 ( x2 ) определяется согласно (4-5), b
1
( 1)
1
,c
1
( 1)
4
1
( 1)
1
,
2 1
вспомогательная обратная функция определяется для 1 на интервале 0 x
4
из условия:
( x) x2 : U1 ( x, x2 ) U1 ( 1 ( x2 ), x2 ).
(9)
6
Рис. 3. Множества безопасных и небезопасных профилей
На рисунке 3, иллюстрирующем теорему 2, показаны безопасные профили (серая
область) и небезопасные профили (горизонтальная и вертикальная штриховка) для игры
соревнования Таллока двух игроков. Слева – случай 1 , справа – 1 .
Теорема 2. Если в соревновании Таллока (3) для двух игроков 0 1 , то в игре
существует единственное РБС, являющееся равновесием Нэша:
(10)
, .
4 4
Если 1 2 , то в игре имеются следующие РБС:
1
1
x ( 1) , 1,
, , (0, x ), ( x , 0),
4 4
x 1, 1,
(11)
и все остальные РБС игры лежат на кривой:
1
1
x1 ( x2 , ( x2 )) :
x2 ,
( x1 , ( x1 )) :
4
4
x 1
( xi ) i 2 xi 2 4xi
2
1
2 1
, max 0,
xi .
4
4
(12)
Если 2 , то в задаче Таллока (3) имеются только два РБС:
(13)
(0, x ), ( x, 0).
Замечание. Численные расчеты показывают что все точки на кривой (12) являются
РБС.
7
Рис. 5. Безопасные профили и равновесия в безопасных стратегиях
На рисунке 5, иллюстрирующем теорему 2, показаны множества безопасных
профилей и равновесий в безопасных стратегиях для трех случаев: при 1 (слева), при
1 2 (внизу) и при 2 (справа).
Подобно равновесиям Нэша, РБС можно ранжировать по Парето. Вычисляя и
сравнивая выигрыши в теореме 2 можно получить следующий результат.
Следствие. Для 1 * все РБС Парето-доминируются равновесием Нэша
* *
*
*
, , где 1.08 находится из условия U1 ( x ( ),0) U1 , .
4 4
4 4
Для * ** все РБС на кривой (12) Парето-доминируются равновесием Нэша
**
** **
**
* 1
.
,
, , где 1.22 находится из условия U1 x ( ), ** U1
4 4
4 4
Для ** *** все РБС, лежащие на некотором интервале на кривой (12), Парето
доминируются равновесием Нэша , , где *** 2 1.41 находится из условия
4 4
U1 ( x, ( x))
0.
x
***
x
0
4
Для 1 2 два РБС ( x , ( ) 1 ( x )) и (( ) 1 ( x ), x )
монопольными РБС (x ,0) и (0, x ) соответственно.
Парето-доминируются
Для 2 имеются три РБС, и при этом одно из них, являющееся равновесием Нэша
(0.5,0.5) Парето-доминируется монопольными РБС (1,0) и (0,1) соответственно.
Для * 2 два монопольных РБС (x ,0) и (0, x ) сосуществуют с симметричным
8
равновесием Нэша , , но не доминируют друг друга.
4 4
5. Интерпретация и обсуждение решения в безопасных стратегиях
Рассмотрим последний, наиболее интересный случай следствия из теоремы. Здесь три
РБС относятся друг к другу подобно равновесиям из матричного примера. Рассмотрим его
еще раз.
L
C
R
U 0,0 0,4
0,3
C 4,0 2,2
1,1
D 3,0 1,1 2,2
Здесь имеется равновесие Нэша (C,C) соответствующее симметричному равновесию Нэша
в задаче (3). Два другие РБС (U,R) и (D,L) соответствуют монопольным РБС. В таком равновесии
побеждающий монополист фиксирует достаточно высокую плату за вход на конкурс борьбы за
ренту, чтобы создать другому игроку барьер, делающий его участие в конкурсе убыточным. Но
непрерывная задача Таллока более сложна – в ней присутствуют еще решения на кривой (12). При
** все они доминируются по Парето равновесием Нэша, так что ими можно пренебречь.
Однако для ** 2 они существенны и могут интерпретироваться как промежуточный тип
решений, когда оба игрока участвуют в конкурсе, но не симметрично, не равноправно. Первый
(«сильный») игрок, выбирающий более высокий уровень усилий x, и другой («слабый»),
выбирающий в качестве своей стратегии наилучший безопасный ответ ( ) 1 ( x) при заданном x.
Слабый игрок выигрывает всегда меньше, чем сильный игрок, и меньше, чем он выиграл бы в
симметричном равновесии Нэша. При движении по кривой (12) выигрыш слабого игрока
монотонно убывает по величине усилия его соперника, от величины выигрыша в равновесии Нэша
до нуля, одновременно с убыванием собственных усилий. Из следствия теоремы 2 видно, что при
*** выигрыш сильного игрока монотонно возрастает при движении по кривой (12) в сторону
увеличения своих усилий. Таким образом, в этом случае можно рассматривать равновесия на (12)
в смысле выигрышей как промежуточные, лежащие между равновесием Нэша и
монополистическими РБС. Сильный игрок непрерывно увеличивает свою плату за участие в
1
1 1
, ( 1) , в которой
конкурсе, а слабый непрерывно уменьшает, до достижения точки
слабый игрок покидает конкурс, а сильный остается в монопольном равновесии, скачком
увеличивая свой выигрыш.
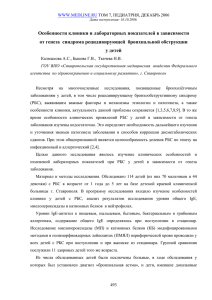
Интересно также рассмотреть вопрос: каков уровень диссипации в ренте? Диссипация ренты
равна отношению суммарных усилий обоих игроков к величине приза, который в данном случае
равен единице. Чем выше уровень диссипации ренты, тем ниже эффективность равновесия для
игроков.
9
Рис. 6. Уровень диссипации ренты в равновесии Нэша, РБС, равновесиях в смешанных стратеиях
x1 x2
Для симметричного равновесия Нэша уровень диссипации равен
2
,
возрастает линейно по и достигает максимума при 2 . Для 1 2 имеются
промежуточные
2
x1 x2
равновесия
1 1
( 1)
(12),
1
с
уровнем
диссипации,
лежащем
в
интервале
, отмеченном на рисунке 6 серым цветом. Можно видеть, что все
эти равновесия менее эффективны, чем равновесие Нэша. Диссипация ренты для двух
1
1
монопольных РБС равна между собой и составляет x1 x2 ( 1) , на рисунке она показана
2
убывающей линией. Также можно видеть, что для 2 , где 1.23 – решение
1
1
( 1) , монопольное РБС эффективней равновесия Нэша. Для 2
уравнения
2
не существует чистого равновесия Нэша, а диссипация ренты равновесия в смешанных стратегиях
равна единице, таким образом, диссипация ренты является полной. Тем не менее, существует два
монопольных РБС с диссипацией ренты меньше, чем 1. То есть, при 2 , концепция РБС дает
более эффективное решение, чем равновесие Нэша в смешанных стратегиях.
6. Заключение
Концепция РБС позволяет находить новые равновесия в игре соревнования за ренту,
таких при которых один игрок прилагает высокий уровень усилий, чтобы удерживать
монополию на ресурс, в то время как другой игрок выбирает нулевое действие. При этом
первый игрок устанавливает безопасную монопольную позицию и не уменьшает ее, так
как это содержит угрозу включение в соревнование другого игрока. Таким образом, первы
игрок устанавливает барьер входа, доступа к ренте. Когда величина параметра 2 и не
существует равновесия Нэша, такая ситуация является единственно стабильной в игре в терминах
безопасных стратегий. Кроме того, этот подход дает более эффективное решение, чем смешанные
стратегии с точки зрения диссипации ренты. Логика наилучших ответов не может показывать
таких «монопольных» равновесий, так как не принимает во внимание соображений безопасности,
и предполагает, что игроки должны выбирать наиболее прибыльные, но не безопасные, и в
конечном счете менее прибыльные для них стратегии.
Общая диссипация ренты зависит от параметра конкурса. Если конкурс очень чувствителен к
усилию игрока (что соответствует большим ), монопольное равновесие одного игрока более
эффективно, уровень диссипации ренты низкий, в то время как равновесие Нэша менее
эффективно или, при 2 , вообще не существует, а уровень диссипации .
10
Литература
1. Бурков В.Н., Кондратьев В.В., Механизмы функционирования организационных
систем, Москва, Наука, 1981, стр. 319-331.
2. Искаков М.Б. Равновесие в безопасных стратегиях. // Автоматика и телемеханика.
2005. №3. С. 139 – 153.
3. Alexeev M., Leitzel J. (1996). Rent shrinking. Southern Economic Journal 62: 620–626
4. Baik K., Lee S. (1997). Collective Rent Seeking with Endogenous Group Sizes. European
Journal of Political Economy 13 :121–130
5. Baye M. R., Kovenock D. and de Vries C.G. (1996). The all-pay auction with complete
information. Economic Theory 8: 362–380.
6. Baye M. R., Kovenock D. and de Vries C.G. (2005). Comparative analysis of litigation
systems: An auction-theoretic approach. Economic Journal 115: 583–601.
7. Clark D.J., Riis C. (1996). Contest success functions: an extension. Economic Theory, 11,
201-204.
8. Che Y.-K., I. Gale (1997). Rent dissipation when rent seekers are budget constrained.
Public Choice 92: 109–126
9. Cowling K., Mueller D.C. (1978). The Social Costs of Monopoly Power. The Economic
Journal 88: 727–748
10. Epstein G., Nitzan S. (2002). Asymmetry and cjrrective public policy in contests. Public
Choice 113: 231–240
11. Garfinkel M. R., Skaperdas S. (2006). Economics of Conflict: An Overview, in T.
Sandler and K. Hartley (eds.) Handbook of Defense Economics Vol. 2 North-Holland.
12. Iskakov M., Iskakov A. (2012), Solution of the Hotelling’s game in secure strategies,
Economics Letters, 117: 115-118.
13. Iskakov M., Iskakov A. Equilibrium in Secure Strategies : CORE discussion paper
2012/61. Center for Operations Research and Econometrics, Universite catholique de Louvain,
December 2012 – 34 p.
14. Krueger A. (1974). The political economy of the rent-seeking society. American
Economic Review 64: 291–303.
15. Laband D.N., Sophocleus J.P. (1998). The social cost of rent-seeking: First estimates.
Public Choice 58(3): 269–275
11
16. Lim W. and Matros A. (2009). Contests with a stochastic number of players. Games and
Economic Behavior 67(2): 584–597
17. Nitzan S. (1994). Modelling rent-seeking contests, European Journal of Political
Economy, 10(1), 41-60.
18. Polterovich V. (2001). Rent seeking, taxpolicy, and economic growth. NES working
paper 2001/25
19. Posner R. A. (1975). The social costs of monopoly and regulation, Journal of Political
Economy 83: 807–827.
20. Skaperdas S. (1994). Contest success functions. Economic Theory, 7, 283-290.
21. Schmalensee R. 1972. The Economics of Advertising. North-Holland, AmsterdamLondon.
22. Shoonbeek L., Kooperman P. (1997). Tullok’s rent-seeking contest with minimum
expenditure requirement. Public Choice 93 : 477–486
23. Szymanski S. 2003. The economic design of sporting contests. Journal of Economic
Literature 41: 1137–1187.
24. Tullock G. (1967). The welfare cost of tarifs, monopolies, and theft. Western Economic
Journal 5: 224–232.
25. Tullock G. (1980). Effcient rent seeking. In: J. Buchanan, R. Tollison and G. Tullock,
(eds.) Towards a Theory of the Rent-Seeking Society. College Station, Texas A&M University
Press, 97-112
26. Warneryd K. (2000). In defense of lawyers: moral hazard as an aid to cooperation.
Games and Economic Behavior 33 (1): 145–158.
12