Применение беспроводных сенсорных сетей для оценки
advertisement

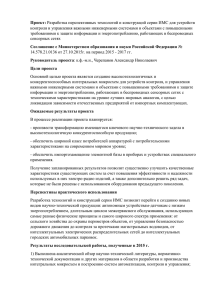
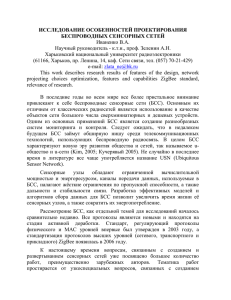
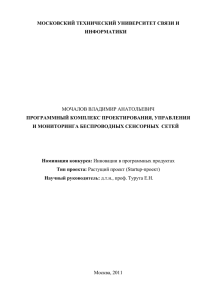
Применение беспроводных сенсорных сетей для оценки состояния критически важных объектов Н.Е. КЛИМЕНКО, М.В. СЕРГИЕВСКИЙ, С.Н. СЫРОЕЖКИН Московский инженерно-физический институт (государственный университет) ПРИМЕНЕНИЕ БЕСПРОВОДНЫХ СЕНСОРНЫХ СЕТЕЙ ДЛЯ ОЦЕНКИ СОСТОЯНИЯ КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ В статье рассматриваются возможности использования технологии беспроводных сенсорных сетей для мониторинга окружающей среды и контроля состояния объектов. Анализируются компоненты сенсорных сетей, их архитектура и протоколы маршрутизации. Описывается технология разработки приложений для беспроводных сенсорных сетей, базирующиеся на операционной системе TinyOS, языке программирования NesC и эмуляторе TOSSIM. Предлагается архитектура беспроводной сенсорной сети, предназначенной для контроля радиационного фона ядерного реактора МИФИ. В последнее время возрастает роль инновационных технологий для решения задач мониторинга и контроля состояния критически важных объектов. Одним из последних достижений в этой области являются беспроводные сенсорные сети (БСС). В данной работе рассмотрены ключевые аспекты разработки беспроводных сенсорных сетей и предложена архитектура сети для оценки состояния критически важного объекта. Беспроводная сенсорная сеть состоит из миниатюрных вычислительных устройств – мотов, размеры которых обычно не превышают одного кубического дюйма. На моте размещаются процессор, память – флэш и оперативная, цифроаналоговые и аналого-цифровые преобразователи, радиочастотный приемопередатчик, небольшой источник питания и датчики (рис. 1). Датчики могут быть самыми разнообразными: от наиболее распространенных, измеряющих температуру, давление, уровень освещенности, до специализированных, позволяющих измерять, например, уровень радиационного фона и содержание CO2 [1]. Радиопередатчик 10 Кбит/с – 1 Мбит/с диапазон до 125 м Встроенный 8-битный процессор, частота 4-8 МГц Память 3 Кбайт- 1 Мбайт Сенсорные датчики А Ц П Батарея Рис. 1. Компоненты мота Моты применяются для сбора и первичной обработки показаний датчиков. Одним из преимуществ технологии БСС является самоорганизация и способность к самовосстановлению, что особенно важно при мониторинге стратегических объектов. Передача данных по сети происходит поэтапно от одного устройства другому. Маршруты передачи формируются автоматически таким образом, чтобы за конечное число пересылок по сети данные с каждого мота были переданы на шлюз, имеющий соединение с корпоративной сетью. В случае выхода из строя одного или нескольких узлов, структура сети изменяется таким образом, чтобы информация со всех работающих мотов могла быть получена шлюзом. Возможность развертывания сети в сложных условиях, отсутствие физических коммуникаций и минимальные размеры сенсорных устройств делают технологию БСС чрезвычайно гибкой. Однако существует ряд специфических требований к функциональности БСС, которые необходимо учитывать. Одним из основных требований является реализация механизмов измеISBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V 63 Применение беспроводных сенсорных сетей для оценки состояния критически важных объектов нения структуры сети, ориентированных на внешние условия, например, на качество связи между узлами, что, в свою очередь, порождает задачу оценки качества связи или, в более общем смысле, «стоимости соединения». Самой энергозатратной операцией для мотов является передача данных в беспроводное окружение. Потому энергосберегающие формы передачи являются ключевым фактором для продления срока службы мотов, так как он практически целиком зависит от срока службы батарей. В сетях с многозвенной пересылкой сообщений узлы выполняют функции как отправителя, так и маршрутизатора. Поэтому выход из строя некоторых узлов из-за отсутствия питания может вызвать значительные изменения в топологии с дальнейшим перенаправлением пакетов и реорганизацией всей сети, что, в свою очередь, вызовет ещё большие энергозатраты. Таким образом, эффективное управление энергетическими ресурсами мотов является важным аспектом функционирования беспроводных сенсорных сетей. Однако слишком строгая экономия энергии имеет и негативные стороны, снижая качество и скорость передачи данных, что недопустимо в некоторых приложениях. Таким образом, протоколы обмена данными должны удовлетворять сразу нескольким требования. Поставленная задача решается на различных уровнях сети: физическом, MAC-уровне, уровне маршрутизации. На физическом уровне основной целью является уменьшение расходов энергии, связанных с пересылкой пакетов данных. На MAC-уровне основная идея заключается в том, чтобы заставить моты как можно дольше находиться в спящем режиме, который характеризуется отключением от питания большинства устройств, входящих в состав мота. И наконец, основной заботой уровня маршрутизации является создание эффективных маршрутов многозвенной передачи сообщений от мота-отправителя к приемнику (обычно шлюзу). Сбор данных беспроводной сенсорной сетью может производиться различными способами в зависимости от целевого назначения конкретной сети. Принимая во внимание различные способы использования сетевых ресурсов, беспроводные сенсорные сети можно разделить на классы в зависимости от вида их функционирования и типа целевого приложения: Проактивные сети. Узлы такой сети периодически включают свои сенсоры и передатчики, снимают показания и передают их на базовую станцию. Таким образом, они делают "моментальную фотографию" своего окружения с некоторой периодичностью и используются обычно для приложений, требующих регулярного мониторинга некоторых значений. Реактивные сети. Узлы реактивных сетей с некоторой периодичностью снимают показания, однако не передают их, если полученные данные попадают в определенную область нормальных показаний. В то же время сведения о неожиданных и резких изменениях в показаниях датчиков или их выходе за диапазон нормальных значений незамедлительно передаются на базовую станцию. Этот вид сети предназначен для работы с приложениями реального времени. Гибридные сети. Это комбинация двух вышеперечисленных типов, где сенсорные узлы не только периодически отправляют снятые данные, но и реагируют на резкие изменения в значениях. Разработка простых и энергосберегающих алгоритмов для работы беспроводных сенсорных сетей привела к появлению различных архитектурных решений. Выделяют два типа архитектуры беспроводных сенсорных сетей: однородные и иерархические (кластерные) [2]. Однородность сети подразумевает, что все узлы выполняют одинаковые функции при сборе, обработке и передаче информации. Этот подход позволяет добиться оптимальной маршрутизации. Пересылка данных происходит по самым удобным по некоторым критериям маршрутам, что позволяет добиться экономии таких важных ресурсов, как энергия (передача идёт по маршруту с самым высоким запасом энергии) и время (передача происходит по самому короткому маршруту). Для критически важных данных может быть организована передача по наиболее надёжному пути. Агрегирование данных, если необходимо, происходит по мере следования сообщений к базовой станции. Однако при такой организации сети формирование связей между узлами происходит спонтанно, что ведёт к столкновениям пакетов и возникновению задержек, связанным с выходом из спящего режима узлов, находящихся на выбранном пути передачи. ISBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V 64 Применение беспроводных сенсорных сетей для оценки состояния критически важных объектов Альтернативным подходом является иерархическая маршрутизация. Она основана на делении сети на области, называемые кластерами. Внутри каждого кластера имеется маршрутизатор – узел, который отвечает за сбор информации со всего кластера, её обработку и дальнейшую передачу. Остальные моты кластера осуществляют только сбор данных и передачу их маршрутизатору. Таким образом, узлы в иерархической сети не равноправны. Во-первых, агрегирование данных происходит на маршрутизаторах, и, во-вторых, пересылка агрегированных данных далее может производиться только маршрутизаторами. Таким образом минимизируются задержки передачи, поскольку маршрутизаторы доступны всегда. Столкновения пакетов исключены благодаря централизованному методу создания ссылок. Однако такая маршрутизация не предоставляет оптимальных путей передачи данных. К тому же мот, выполняющий функции маршрутизатора, тратит значительно больше энергии, что приводит к быстрому истощению его батарей. Существуют архитектуры, предполагающие использование в качестве маршрутизаторов физически выделенных мотов, обладающих большими запасами энергии и вычислительными мощностями, однако этот подход применим только для узкого ряда приложений. Беспроводные узлы функционируют под управлением специального приложения. Обычно все узлы сенсорной сети используют одну и ту же управляющую программу, в которой, вопервых, реализуется их функциональность, и, во-вторых, присутствуют перечисленные выше сетевые протоколы. В данной работе рассматривается процесс создания приложений для БСС при помощи специальных средств: операционной системы TinyOS, языка программирования NesC и эмулятора TOSSIM, предназначенного для моделирования работы сети на ПК. Разработанное в целях практического освоения этих средств приложение реализует базовые для любого мота операции: управляет снятием показаний с датчиков, осуществляет поиск соседних узлов в сети и передает им свои показания. TinyOS – это операционная система класса Open Source, разработанная специально для использования в БСС. Характерными особенностями TinyOS являются компонентная архитектура, событийная модель управления и статическое распределение памяти. Благодаря этому стала возможна реализация, обеспечивающая минимальный размер кода, что существенно для мотов, имеющих строгие ограничения по объему памяти и оснащенных маломощными батареями. TinyOS перенесена более чем на дюжину платформ и поддерживает многочисленные сенсорные устройства. NesC (network embedded system C) – это компонентно-ориентированный язык программирования, построенный на базе языка C. Приложение на NesC представляет собой набор компонентов и интерфейсов для межкомпонентного взаимодействия. Полученное приложение на этапе компиляции для конечной аппаратной платформы интегрируется с ядром системы в один выполняемый файл, который и загружается на сенсорный узел [3, 4]. Обычно приложение разрабатывается под конкретную БСС, что связано с оптимизацией работы сети, однако существуют и попытки создания библиотек общего назначения. В работе использовалась библиотека сетевых протоколов XMesh компании Crossbow. XMesh – это полноценный многошаговый протокол для БСС, разработанный Crossbow [5]. Данный протокол поддерживает сети с однородной архитектурой, в которой узлы обмениваются сообщениями путём их пошаговой передачи. Большую часть времени узлы, использующие стек протоколов XMesh, проводят в спящем режиме, что позволяет существенно продлить срок службы каждого узла. Протокол XMesh по своей сути является библиотекой компонентов для операционной системы TinyOS, что позволяет использовать его функциональность при написании своих приложений. В данной работе проектируется архитектура беспроводной сенсорной сети, предназначенной для контроля радиационного фона ядерного реактора МИФИ. Перечислим общие требования, предъявляемые к разрабатываемой сети. Сеть должна контролировать радиационный фон на всей территории, занимаемой реактором; ориентировочно это прямоугольная площадка размером 400200 метров. Сеть должна содержать минимально возможное число узлов, т.е. одной из целей является отсутствие явной избыточности. Добавление дополнительных узлов в структуру сети в случае необходимости не составит труда. Управление сетью осуществляется с базовой ISBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V 65 Применение беспроводных сенсорных сетей для оценки состояния критически важных объектов станции, находящейся в здании реактора. Расстояние между мотами не должно превышать пятидесяти метров, что обеспечивает надежную радиосвязь для мотов платформы Iris. Рассматриваются два варианта размещения узлов БСС, предусматривающие различное количество мотов в зависимости от требований надёжности. В качестве схемы размещения узлов сети выбрана, в первом случае, четырёхугольная сетка как предоставляющая равномерное распределение областей снятия показаний с минимальными перекрытиями; во втором случае смешанная трех- и четырёхугольная сетка. Первая из разработанных схем предъявляет минимальные требования к надёжности и предусматривает наличие по крайней мере двух соседей для каждого узла (рис. 2); вторая предполагает усиление контроля радиационного фона в наиболее важных областях (рис. 3). Первая схема использует 32 мота, вторая – 41. При возникновении дополнительных требований к надёжности сети и к точности интегральных показаний сенсоров количество узлов сети может быть легко увеличено. Показания сенсоров будут использоваться для мониторинга состояния объекта. Периодичность снятия показаний может регулироваться. При возникновении чрезвычайной ситуации сеть должна работать по реактивному сценарию, т.е. немедленно сообщить о критических значениях параметров. Для маршрутизации сообщений могут быть использованы как однородная сеть, так и сеть с иерархической кластерной структурой. В первом случае роль маршрутизатора может выполнять любой мот сети, во втором – только узлы кластеров. Естественно более надежной является однородная сеть, но сеть с кластерной структурой более экономична. Для управления сетью предлагается использовать систему протоколов XMesh. Выбор всех необходимых параметров сети будет осуществлен в результате экспериментов, проведенных на реальном объекте. Дополнительно предполагается разработать алгоритмы, отсеивающие избыточные сообщения. Рис. 2. Минимальное покрытие Рис. 3. Покрытие с усиленным контролем некоторых зон Поскольку при разработке архитектуры сети учитывались только общие ограничения, полученные результаты могут быть использованы для мониторинга состояния самых разных объектов с произвольным набором параметров. Отличия будет связаны в основном с используемыми сенсорными датчиками и определением режимов работы сети. СПИСОК ЛИТЕРАТУРЫ 1. Mainwaring A., Culler D., Polastre J., et al. // Proc. of the 1st ACM international workshop on Wireless sensor networks and applications. Atlanta. ACM, 2002. P. 88. 2. Cordeiro C.M. Ad hoc & sensor networks Theory and Applications / C.M. Cordeiro, D.P. Agrawal. – Singapore: World Scientific Publishing Co., 2006. 3. Бурдонов И.Б. Операционные системы реального времени / И.Б. Бурдонов, А.С. Косачев, В.Н. Пономаренко. – М.: CITForum, 2006. – 347 c. 4. TinyOS [Электронный ресурс] : сайт проекта TinyOS / Беркли – Университет Калифорнии. – Беркли: University of California, Berkeley, 2006. – Режим доступа: http://www.tinyos.net. 5. XMesh User’s Manual / Crossbow Technology Inc. – San Jose: Crossbow Technology Inc, 2007. ISBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V 66 Применение беспроводных сенсорных сетей для оценки состояния критически важных объектов ISBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V 67