определение расстояния до препятствия с помощью
реклама

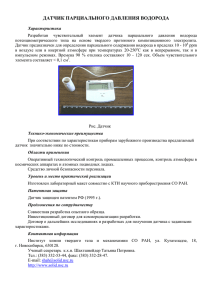
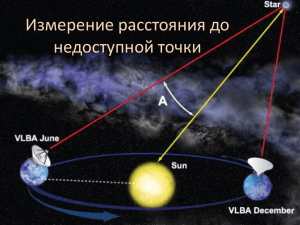
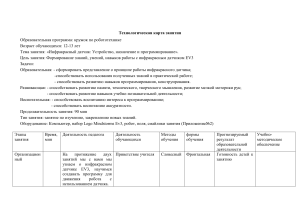
XIX Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ» Секция 7: Информатика и управление в технических системах ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ДО ПРЕПЯТСТВИЯ С ПОМОЩЬЮ ИНФРАКРАСНОГО ДАТЧИКА УЧЕБНОЙ СИСТЕМЫ ROBOTINO Бабинасова А.Н., Шпакова А.М., Юдина О.П. Научный руководитель: Михайлов В.В., доцент, к.т.н Томский политехнический университет, 634050, Россия, г. Томск, пр. Ленина, 30 E-mail: [email protected] В настоящее время в мире интенсивно расширяются области исследований и использования мобильных роботов - мехатроных систем, базирующихся на последних достижениях механики, микропроцессорной техники, контрольно- измерительных систем, информатики и теории управления. Для успешного выполнения обширного круга задач роботы должны обладать как мобильностью, так и способностью планировать и автоматически выполнять полученное задание. Их особенность возможность достижения заданной цели в неопределенной внешней среде, избегая столкновений со стационарными препятствиями и подвижными объектами. Мобильные роботы снабжены различными локационными датчиками, определяющие скорость движения и наличие препятствий на его пути, а также позволяющими роботам реагировать на посторонние предметы, случайно оказавшиеся в зоне действия. Учебная система Robotino позволяет познакомиться с многогранной областью мобильной робототехники. Особенный интерес учебная система Robotino вызывает потому, что покрывает весь диапазон современной техники. Robotino позволяет приобрести необходимые навыки и умения через практические эксперименты. Robotino View это интерактивная визуальная программно учебная среда для робота, которая соединяется с помощью Wireless LAN прямо с системой управления робота. Поэтому, чтобы управлять Robotino, необходим только персональный компьютер, который может установить связь с WLAN (рис.1). После установления связи, Robotino будет являться точкой доступа для компьютера. Каждый Robotino должен иметь одинаковый IP-адрес, так как каждый формирует свою собственную сеть. В ходе выполнения работы важными составляющими являются 9 инфракрасных датчиков, расположенных по бокам бампера и датчик защиты от столкновений. Инфракрасный датчик расстояния состоит из эмиттера, который излучает луч инфракрасного света, соответствующего приёмника и электронного вычислительного (оценочного) блока (рис.2). Рис.2. Инфракрасный датчик расстояния Расстояние до объекта сенсоры определяют при помощи триангуляции (рис.3). Рис.3. Триангуляционный метод измерения Излучатель испускает инфракрасный луч. Если этот луч не попадает на предмет, он не отражается и поэтому приёмник не принимает луч света. Однако, если свет отражается от предмета, луч света обнаруживается в пределах некоторой области приёмника. Так как передатчик излучения и фотоприёмник расположены на малом расстоянии друг от друга в пределах датчика, испускаемые и принимаемые лучи света формируют треугольник. В зависимости от расстояния луч света попадает на различные участки приёмника. Приёмник состоит из светочувствительного детектора (PSD), который определяет различные точки падения луча. Блок обработки сигналов преобразует их в аналоговую величину напряжения. Рис.1. Соединение Robotino с компьютером 208 XIX Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ» Секция 7: Информатика и управление в технических системах PSD представляет собой фотодиод пластинчатой формы. Он состоит из металлического и светочувствительного слоёв. На краях этих слоёв расположены металлические электроды. Если луч света попадает в точку на этом светочувствительном слое, это разъединяет носители заряда, которые порождают электрический ток по направлению к двум электродам. Неосвещённая часть слоя действует как сопротивление. Зависимость между токами не зависит от количества падающего света; поэтому измерение расстояния не зависит от коэффициента отражения и материала объекта (рис.4) [3]. что разрыв кабеля может быть обнаружен и Robotino остановится. Буфер, доступный в программе Robotino View в Robotino находится в папке аппаратных средств и не нуждается в параметризации. Он вырабатывает один сигнал после соприкосновения и используется главным образом для остановки Robotino в случае столкновения. Для этой цели он подсоединён к выходу папки Sequence Control (Контроль последовательности). Тогда в случае столкновения программная последовательность прерывается. Чувствительные грани в основном используются в безопасной технологии, чтобы обезопасить людей или исключить ущерб наносимый машинам или материалам в результате раздавливания или разреза (рис. 5). Рис.5. Чувствительные поверхности Рис.4. Определение расстояния до объекта Для избавления от возможных помех, сенсоры излучают инфракрасный сигнал с модулированной частотой. Это позволяет практически полностью застраховаться от помех от окружающего света. Кроме того, датчики показывают почти полное безразличие к цвету объекта обнаружения (датчик способен обнаруживать чёрные стены при солнечном свете [2]. В большинстве случаев излучатель, приёмник и блок обработки сигналов объединены в одно устройство. Примеры типичных областей применения инфракрасных датчиков: системы управления расстоянием при парковке на автомобилях, открывание дверей или в системах аварийной сигнализации. Датчик защиты от столкновений Robotino состоит из так называемой чувствительной кромки. Эта чувствительная кромка состоит из полимерного профиля переменной формы с интегрированной коммутационной полостью. Две раздельных проводящих области расположены в пределах полости, которые накоротко смыкаются при воздействие давления на чувствительную кромку, таким образом, генерируя сигнал для блока оценки. Чувствительная кромка на Robotino работает в соответствие с принципом тока в рабочей точке так, 209 Интерактивная визуальная программно учебная среда для робота Robotino View с помощью блоксхем функции “дистанция», позволяет управлять данными датчиками, дает возможность определять расстояние от препятствия и останавливаться при столкновении (рис. 6) [1]. Рис.6. Блок-схема функции “дистанция» В итоге робот совершает перемещение по поверхности, определяя объекты на своем пути и останавливаясь на заданном расстоянии от него. В случае сбоя работы или программы робота, сработает датчик защиты и позволит безопасно завершить его дальнейшее перемещение при не значительном столкновении, которое не приведет к поломке робота. Список литературы: 1. Bliesener, Weber, Karras, Kling, Zitzmann. Festo. Robotino® .- Denkendorf, 2007 2. Датчик измерения расстояния [Электронный ресурс]. - Режим доступа: http://robocraft.ru/ (дата обращения 22.02.2013) 3. Триангуляционный метод измерения [Электронный ресурс]. - Режим доступа: http://www.sensorica.ru (дата обращения 22.02.2013).