Д.Т. Бабичев. Компьютерное моделирование работы плоских
реклама

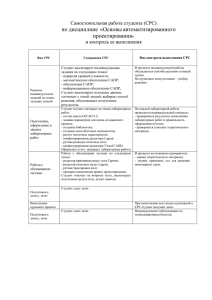
УДК 531.8+519.688 Д.Т. Бабичев КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ РАБОТЫ ПЛОСКИХ МЕХАНИЗМОВ И МНОГОВАРИАНТНОЕ КОНСТРУИРОВАНИЕ РЕДУКТОРОВ Дмитрий Тихонович Бабичев – г. Тюмень, Россия Тюменский государственный нефтегазовый университет Институт транспорта, кафедра “Детали машин”, доктор технических наук, профессор ТюмГНГУ профессор кафедры “Детали машин”. Информация для контактов: тел. 3452 200790, факс 3452 390375 (Бабичеву) 89088743130, [email protected], [email protected] На кафедре “Детали машин” ТюмГНГУ автором создано и используется в учебном процессе несколько десятков программ для моделирования работы плоских рычажных механизмов. Главная цель создания этих программ – отработка методик внедрения в преподавание основ оптимизационного проектирования механизмов и машин. А также создание задела программ для интерактивного электронного конспекта лекций по ТММ. Информация о части таких программ, разработанных в Excel, представлена в табл. 1. Далее приведены примеры работы главных из программ, включенных в табл. 1, и даны краткие пояснения к ним. 1. Анализ рычажных механизмов На рис. 1. приведены результаты работы программы для полного анализа кинематики механизмов В_ВВП. Этот пример иллюстрирует типовую структуру большинства наших Excel-программ – готовый для распечатки документ содержит: исходные данные, «живые» диаграммы и таблицы основных результатов. Представленное на рис.1 печатается из Excel на двух листах формата А4 в альбомной ориентации. Обращаем внимание на то, что: на планах механизма, скоростей и ускорений проставлены обозначения точек, а на соответствующих кинематических диаграммах отображены значения параметров в текущем положении. При нажатии кнопки «ПУСК», все диаграммы на экране «оживают»: планы механизмов, скоростей и ускорений меняют свою конфигурацию, по диаграммам перемещаются указатели текущих точек. Подобные программы используются при выполнении РГР: после ручных построений делается расчет на ЭВМ, и студентом оценивается точность его графических построений. 12 Таблица1 Перечень Excel-программ для учебного процесса Программы для моделирования работы Объем, Вид плоских механизмов КБ занятий 7 программ для показа работы и уравновешиваЛ, СРС, 7× ния четырехзвенных рычажных механизмов: В_ВВВ, ПЗ, ЛР, 750 В_ВВП, В_ПВВ, В_ВПВ, В_ВПП, В_ППВ, В_ПВП НИРС 4 программы для частичного и полного анализа 1100 СРС, РГР кинематики механизмов В_ВВВ, В_ВВП Генератор Excel-программ для анализа механизЛ, СРС, 3000 мов, состоящих из двухзвенных групп Ассура НИРС, ПЗ Программа-прототип для КП по ТММ: кинемаКП, Л, тика и динамика шестизвенника (включая уравнове- 170 СРС, шивание по Чебышёву) НИРС, Проектирование эвольвентных цилиндрических ЛР, Л, КП, 600 передач ПЗ, СРС 2 программы для анализа и синтеза планетар- 260 Л, ПЗ, ЛР, ныхпередач 410 СРС Геометрия и кинематика трехзвенных роторных 100 Л, СРС, механизмов: двигатель Ванкеля, насосы, забойные 300 НИРС двигатели (3 версии программы) 600 Мини САПР Кулачек – для анализа и синтеза КП, Л, ПЗ, 1100 кулачковых механизмов с вращающимся кулачком ЛР, СРС Мини САПР Редуктор – расчет и конструироваКП, Л, ПЗ, 850 ние одноступенчатого цилиндрического редуктора ЛР, НИРС КП – курсовое проектирование, Л – лекции, ЛР – лабораторные работы, НИРС – научно-исследовательская работа студентов, ПЗ – практические занятия, РГР – расчетно-графические работы, СРС – самостоятельная работа студентов. На рис. 2 две диаграммы из программы-прототипа по ТММ (всего в программе 20 диаграмм). В левой части рисунка находится схема механизма с противовесом, на которой показаны, в том числе, и траектории движения общего центра масс до и после установки противовеса. На этих траекториях (красных, в центре рисунка) показаны и положения трех центров масс: противовеса, звеньев механизма и общего. На рис.2 справа – годограф суммарной силы инерции после уравновешивания. Эта программа-прототип несколько лет использовалась в потоках МОП (машины и оборудование промыслов) при курсовом проектировании по ТММ, когда весь кинематический и динамический анализы студенты выполняли на ЭВМ. Для чего каждый создавал программу в Excel для анализа своего шестизвенника (у каждого студента структура механизма задавалась разная). Для уменьшения объема технической работы был создан генератор 13 Excel-программ. Скорости и ускорения определяли разностным методом: находили три соседних положения механизма (при перемещении кривошипа Δφ ≈ 0,010), и линейные скорости и ускорения точек рассчитывали по формулам для вычисления первых и вторых разностей. Достоинства метода: универсален и прост в применении, понятен студентам, экономит учебное время; дает в Excel точность 7-11 значащих десятичных цифр. Рис. 1. Кинематика кривошипно-ползунного механизма 14 Рис. 2. Анализ работы шестизвенного механизма 2. Анализ и синтез зубчатых передач Основной по зубчатым передачам является программа анализа и синтеза эвольвентных зацеплений. Такие программы есть во всех втузах и ее описание малоинтересно. Отметим лишь, что последняя версия нашей программы (переработанная аспирантом кафедры ТТС) позволяет: проектировать передачу с коэффициентом перекрытия ε > 3, оптимизировать параметры зацепления по различным критериям, оценивать виброактивность от сил трения зубьев. На рис.3 показаны две планетарные передачи, Рис. 3. Синтез планетарных передач 15 полученные по двум разным, но похожим программам. В одном из примеров нарушено условие сборки. Эти две программы весьма полезны для демонстрации явлений нарушения условия сборки (симметричности) и соседства в планетарных и в многопоточных соосных передачах. 3. Анализ трехзвенных роторных механизмов Такие механизмы широко применяют нефтяники в винтовых забойных двигателях, а так же в винтовых насосах (при кинематических отношениях рабочих органов от 1:2 до 9:10). На рис. 4. слева показан двигатель Ванкеля – механизм с кинематическим отношением –3:2 (число сторон ротора N=3, тип =1). На рис. 4 справа – механизм, у которого N=4 и вращения кривошипа и ротора встречные (тип =-1). Наибольший интерес программа представляет для студентов нефтегазового направления. И для студентов транспортного направления – из-за двигателя Ванкеля. Рис. 4. Двигатель Ванкеля и механизм винтового насоса 4. Анализ и синтез кулачковых механизмов На кафедре «Детали машин» много лет проводилась работа по созданию мини САПР «Кулачок» [1]. Прежде всего, были систематизированы плоские трехзвенные кулачковые механизмы по трем критериям: 1) по виду движения кулачка и толкателя (коромысла): В – вращательное, П – поступательное; 2) по виду рабочего элемента на толкателе (коромысле): Р – ролик, П – прямая (плоскость), О – дуга окружности, К – другая кривая (см. рис. 5, где показано 6 механизмов из 15 существующих). Затем 15 механизмов были систематизированы еще по трем критериям: 4) по виду касания толкателя с кулачком: В – внутреннее, Н – наружное, П – в пазу (по умолчанию – Н); 5) по виду кулачка: О – обычный, Д – диаметральный (по умолчанию – О); 6) по числу кулачков при геометрическом замыкании (одно и двухдисковые кулачки по терминологии работы [2]). Рис. 6 и 7 поясняют эту систематизацию по трем параметрам. 16 Основываясь на выполненной систематизации, разработана система обозначений типов кулачковых механизмов – см. надписи вверху рис. 5-7. ВВР а) ВВП ВВО б) в) ВПР ВПП ВПО г) д) е) Рис. 5. К систематизации по виду движения и форме толкателя ВПРВО (ВПРВ) ВПРПО (ВПРП) ВППНД ВПРПД Рис.6. К систематизации по характеру касания и конструкции кулачка ВВР2Н–В ВПР2Н–В ВВР2Н–Н (ВВР2) Рис.7. Примеры механизмов с двухдисковым кулачком Общее число типов механизмов с однодисковым кулачком равно 66: с вращающимся кулачком их 34, и 32 с поступательно движущимся. Была также разработана система задания параметров (размеров), единая для всех типов кулачковых механизмов. В качестве основных геометрических параметров для всех механизмов с вращающимся кулачком берем 6 его главных размеров (рис. 8): Н – ход базовой точки толкателя (коромысла), S0 – размер кулачка, L – размер толкателя (коромысла), – угол наклона его рабочего элемента , R – радиус кривизны рабочего элемента, Е – эксцентриситет механизма. Рис. 8. Единые параметры для механизмов с вращающимся кулачком Главные задачи, решаемые в САПР «Кулачок»: 1. Нахождение профиля кулачка при заданных законах движения толкателя или коромысла; построение диаграмм перемещений, скоростей и ускорений. 2. Определение качественных показателей и построение соответствующих диаграмм 17 (углов давления; контактных напряжений в высшей паре с учетом усилия пружины и инертностей; потерь мощности на трение и других). 3. Управление движением кулачка. 4. Оптимизация параметров по критериям: углы давления, кривизны, контактные напряжения и другие (в том числе методами нелинейного программирования с использованием надстройки «Поиск решения»). 5. Исследование влияния исходных параметров– аргументов (их до 10) на качественные показатели (их более 10). В настоящее время в САПР «Кулачок» реализованы все механизмы, показанные на рис.5, при всех видах касания ролика с кулачком; их 12. На рис.9 приведен пример проектирования двух механизмов в САПР «Кулачок». Их параметры, указанные сверху справа на рис. 9, совершенно одинаковы. Вначале был спроектирован механизм типа ВПРП (рис. 9а). Затем – рис. 9б – был изменен только тип механизма с ВПРП на ВВР. Как видно из диаграмм, для двух этих механизмов максимальные углы давления почти не изменились (так же, как и контактные напряжения, не показанные на рис.9), хотя характер кривой углов давления заметно поменялся. Рис. 9. Пример проектирования механизмов в САПР “Кулачок” 18 Опыт использования САПР «Кулачок» показал, что в рамках курсовых и расчетно-графических работ по ТММ многим студентам нравится проводить исследования и оптимизационный синтез кулачковых механизмов с помощью этой системы. Типовых тем для исследований более десяти. Среди них: выявить, как влияет число оборотов кулачка на контактные напряжения в высшей паре и места наибольшего износа кулачка и т.п. 5. Конструирование одноступенчатых цилиндрических редукторов Общий уровень знаний и умений студентов резко снизился в последние годы. Многие из них уже и чертежи читать не могут. Выполнить самостоятельно курсовую работу или РГР по деталям машин и основам конструирования (ДМ и ОК) они не в состоянии. Но и таких студентов хоть чему-то по ДМ и ОК надо научить: читать чертежи, знать названия и назначения типичных деталей машин. И еще у таких студентов следует пробуждать интерес к изучению конструкций машин и ставить в условия, когда они вынуждены выполнять работу самостоятельно. Этой цели и служит программа Редуктор1.xls, созданная для расчета и конструирования одноступенчатых цилиндрических редукторов – самой распространенной теме курсовых работ и РГР для студентов нефтегазового направления. Основными исходными данными для Редуктор1.xls являются параметры передачи (рис.10 верх) и параметры конструкции (рис.10 низ). Рис. 10. Элементы интерфейса мини САПР “Редуктор1” 19 Результаты расчетов помещаются в файлы: ФамилияЗаписка.xls и Фамилиячертеж.xls. В *Записка.xls – пояснительная записка к расчетам (по 4 страницы для одного расчета и чертежи редукторов). В *Чертеж.xls – выбранный пользователем чертеж для распечатки на формат А1. О работе программы. После ввода очередного числа программа вычисляет все параметры, которые от него зависят: диаметры валов, параметры передачи, серии подшипников, размеры элементов корпуса, крышек и др. Все параметры всех деталей округляются, когда это возможно, до стандартных значений (длины болтов, размеры шпонок, сальников и т.п.). Управление программой осуществляется с пульта (рис.10 слева внизу). Предусмотрено два режима работы программы: обычный и исследовательский. На рис. 11 показано, как задают тему и параметры исследования. Рис. 11. Выбор темы исследования и задание его параметров На рис. 12 – чертеж из файла *Записка.xls: это результат обычного проектирования. При исследовании в записку добавится еще 5 чертежей, в которых: передаточные числа редуктора u = 2, 4, 6, 8, 10 (см. рис 10-11), и межосевые расстояния aw не округлены до стандартных значений. После выполнения компьютерного проектирования студент: распечатывает файл *Записка.xls на принтере и файл *Чертеж.xls на плоттере в формате А1; оформляет чертеж А1 (штамп, технические требования, размеры, номера всех деталей и узлов) и заполняет спецификацию; 3) делает рабочий чертеж 1-2 деталей; 4) описывает ход компьютерного проектирование и главное (!) – проводит анализ выполненного исследования. При этом он пишет в записке, как изменяемый параметр влиял на конструкцию (расстояние между отверстиями под подшипники, конструкцию колеса и шестерни, число болтов и их установку и т.п.). И строит графики, наглядно показывающие зависимости, выявленные при исследовании. 20 С использованием программы Редуктор1.xls студентами за 2 года выполнено более 200 курсовых работ. В целом, поставленные цели, достигаются. ВЫВОДЫ Рис. 12. Чертеж из файла*Записка.xls 1. Учебно-методическое обеспечение по ТММ должно быть таким, чтобы студент при изучении этой дисциплины, мог увидеть движение любого из изучаемых типов механизмов: виртуально на домашнем компьютере и реально в учебной лаборатории. 2. Разделяем точку зрения, изложенную в [3]: в инженерных расчетах механизмов и машин целесообразно использовать общедоступную систему Excel, а также MathCAD. 3. Один из главных недостатков Excel, затрудняющий анимацию механических систем, – отсутствие в нем диаграмм типа чертеж (с одинаковыми масштабами по осям) и средств работы с такой инженерной графикой. СПИСОК ЛИТЕРАТУРЫ 1. Бабичев Д.Т., Бабичев Д.А. Разработка многоязычной САПР “КУЛАЧОК” // Информационные технологии в образовательном процессе: Материалы областной межвузовской научно-методической конф. – Тюмень: Вектор Бук, 2002. – С.26-31. 2. Левитский Н.И. Теория механизмов и машин, М: Наука, 1979, 576 с. 3. Евграфов А.Н., Петров Г.Н. Компьютерная анимация кинематических схем в программах Excel и MathCAD // Теория механизмов и машин. 2008. № 1. С. 71-80. 21