четность в теории узлов и граф-зацепления
advertisement

Современная математика. Фундаментальные направления. Том (). С. 1–157
УДК 515.16+519.17
ЧЕТНОСТЬ В ТЕОРИИ УЗЛОВ И ГРАФ-ЗАЦЕПЛЕНИЯ
c г.
⃝
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
АННОТАЦИЯ. Настоящая монография посвящена маломерной топологии в контексте двух бурно развивающихся теорий: теории четностей и теории граф-зацеплений — важному обобщению теории виртуальных узлов, построенному на основе графов пересечений. Введенная вторым автором теория
четностей позволяет по-новому взглянуть на теорию виртуальных узлов, теорию кобордизмов кривых
в двумерных поверхностях и некоторые другие задачи топологии. Теория граф-зацеплений связана с
нахождением новых комбинаторных подходов к теории узлов.
СОДЕРЖАНИЕ
1. Предисловие . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Благодарности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Введение. Основные понятия . . . . . . . . . . . . . . . . . . . . . . . .
3.1. Классические узлы . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Виртуальные узлы . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3. Скобка Кауфмана и индекс самозацепления . . . . . . . . . . . . .
3.4. Атомы и виртуальные узлы . . . . . . . . . . . . . . . . . . . . . .
4. Эйлеровы циклы, гауссовы циклы и поворачивающие обходы . . . . .
4.1. 4-Графы и эйлеровы циклы . . . . . . . . . . . . . . . . . . . . . .
4.2. Оснащенные 4-графы и эйлеровы циклы . . . . . . . . . . . . . . .
4.3. Существование гауссова цикла . . . . . . . . . . . . . . . . . . . .
4.4. Гауссов цикл . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5. Матрицы смежности . . . . . . . . . . . . . . . . . . . . . . . . . .
5. Четность в теории узлов . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1. Свободные узлы и четная аксиоматика . . . . . . . . . . . . . . . .
5.1.1. Ослабленная четная аксиоматика . . . . . . . . . . . . . . .
5.1.2. Теория виртуальных узлов . . . . . . . . . . . . . . . . . . .
5.1.3. Двухкомпонентные классические и виртуальные зацепления
5.1.4. Узлы в полнотории, кривые на двумерных поверхностях . .
5.2. Четность и гомологии . . . . . . . . . . . . . . . . . . . . . . . . .
5.3. Классификация четностей для свободных узлов . . . . . . . . . .
5.4. Функториальное отображение f . . . . . . . . . . . . . . . . . . .
5.4.1. Случай четности из пункта 5.1.2 . . . . . . . . . . . . . . .
5.4.2. Иерархия четностей на виртуальных узлах . . . . . . . . . .
5.4.3. Случай четности из пункта 5.1.3 . . . . . . . . . . . . . . .
5.4.4. Случай четности из пункта 5.1.4 . . . . . . . . . . . . . . .
5.5. Инварианты . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.1. Разведения . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2. Оснащенные 4-графы . . . . . . . . . . . . . . . . . . . . . .
5.5.3. Свободные узлы и зацепления . . . . . . . . . . . . . . . . .
5.5.4. Линейное пространство G . . . . . . . . . . . . . . . . . . .
e . . . . . . . . . . . . . . . . . . .
5.5.5. Линейное пространство G
5.5.6. Инварианты [ · ], { · } . . . . . . . . . . . . . . . . . . . . . . .
5.5.7. Применения инвариантов . . . . . . . . . . . . . . . . . . . .
5.5.8. Необратимость свободных зацеплений . . . . . . . . . . . .
5.6. Скобка Голдмана и коскобка Тураева . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
4
4
4
7
15
17
20
21
22
25
26
31
37
39
43
43
44
44
45
46
51
52
53
55
55
55
55
56
57
57
57
57
61
63
67
c
⃝РУДН
1
2
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
5.6.1. Отображение m : Γ2S → ΓS . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2. Алгебра Ли Голдмана . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.3. Отображения ΓS → Γ2S,0 и ΓS → ΓS ⊗ ΓS / < . >. Коскобка Тураева [215]
5.7. Применения дельты Тураева . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.1. Необратимость свободных узлов . . . . . . . . . . . . . . . . . . . . . . . .
5.7.2. Четные и нечетные аналоги скобки Голдмана и коскобки Тураева . . . . .
5.8. Аналог скобки Кауфмана . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6. Кобордизмы свободных узлов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1. Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2. Комбинаторный кобордизм свободных узлов . . . . . . . . . . . . . . . . . . . .
6.3. Инвариант свободных узлов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1. Граф Кэли для группы G . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2. Замечания об определении инварианта L для зацеплений . . . . . . . . .
6.4. Срезанный род и кобордизмы свободных узлов . . . . . . . . . . . . . . . . . . .
6.5. Четность для кривых в двумерных поверхностях . . . . . . . . . . . . . . . . . .
6.6. Срезанность свободных узлов . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.1. Построение функции Морса и графа Риба . . . . . . . . . . . . . . . . . .
7. Граф-зацепления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1. Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2. Граф-зацепления и петлевые графы . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.1. Хордовые диаграммы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.2. Движения Рейдемейстера для петлевых графов и граф-зацеплений . . . .
7.2.3. Петлевые графы и граф-зацепления . . . . . . . . . . . . . . . . . . . . . .
7.2.4. Операции разведения и ∆ (дельта) Тураева . . . . . . . . . . . . . . . . .
7.3. Четность, минимальность и нетривиальные примеры . . . . . . . . . . . . . . . .
7.4. Скобка Кауфмана. Теоремы минимальности . . . . . . . . . . . . . . . . . . . . .
8. Гомологии Хованова для классических узлов, виртуальных узлов и граф-зацеплений
8.1. Гомологии Хованова граф-зацеплений с коэффициентами в Z2 . . . . . . . . . .
8.1.1. Корректность частичных дифференциалов . . . . . . . . . . . . . . . . . .
8.1.2. Коммутативность двумерных граней . . . . . . . . . . . . . . . . . . . . . .
8.2. Целочисленные нечетные гомологии Хованова граф-зацеплений . . . . . . . . .
8.2.1. Главно унимодулярные двудольные граф-зацепления . . . . . . . . . . . .
8.2.2. Нечётные гомологии Хованова PU-граф-зацеплений . . . . . . . . . . . . .
8.3. Полином Джонса граф-зацеплений и гомологии Хованова граф-зацеплений . . .
9. Нерешенные задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1. Свободные узлы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2. Граф-зацепления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3. Кобордизмы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Список литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
67
68
68
69
69
71
73
73
74
77
79
81
82
84
87
88
91
91
94
94
95
99
109
111
113
116
119
121
121
126
126
131
142
144
144
145
145
146
ПРЕДИСЛОВИЕ
В последние десятилетия теория узлов переживает бурное развитие комбинаторных подходов,
связанные как с новыми комбинаторно определяемыми инвариантами (гомологии Хованова), так
и с новыми комбинаторно определяемыми теориями (теория виртуальных узлов Кауфмана, нанослова и нанопредложения Тураева). Это развитие является естественным продолжением работ
Дж. Х. Конвея, В. Ф. Р. Джонса, Л. Х. Кауфмана, положивших основу диаграмматическое теории
узлов.
Одно из замечательных обобщений теории узлов — теория виртуальных узлов, изобретенная
Л. Х. Кауфманом в конце 1990-х. Теория виртуальных узлов описывает узлы в утолщенных поверхностях с точностью до изотопии и стабилизации. Она допускает простое описание посредством
гауссовых диаграмм по движениям Рейдемейстера. Дело в том, что не все гауссовы диаграммы
1. Предисловие
3
описывают классические узлы, а те гауссовы диаграммы, которые не соответствуют классическим
узлам, задают как раз виртуальные узлы.
Важной вехой в развитии теории узлов явилось открытие М. Г. Ховановым категорификации
полинома Джонса, в дальнейшем называемой «гомологиями Хованова». Суть категорификации состоит в переходе от полинома (т.е. набора коэффициентов со степенями) к формальному цепному
комплексу, гомологии которого инвариантны относительно движений Рейдемейстера. Гомологии
Хованова относятся к полиному Джонса примерно так же, как обычные гомологии относятся к
эйлеровой характеристике. Гомологии Хованова были отправной точкой в категорификации других инвариантов в маломерной топологии. Важнейшим свойством гомологий зацеплений является
их функториальность — возможность построения корректно определенного отображения, соответствующего функторам-кобордизмам.
Забывание у виртуальных узлов информации о проходах/переходах приводит к нетривиальной
теории плоских узлов — гомотопических классов кривых на двумерных поверхностях, рассматриваемых с точностью до стабилизации. Дальнейшее упрощение этой теории, связанное с забыванием информации об ориентации окружающей поверхности, приводит к теории свободных узлов,
описываемой посредством формальных гауссовых диаграмм без стрелок и знаков по движениям Рейдемейстера, в которых эти стрелки и знаки также участия не принимают. Смысл таких
движений Рейдемейстера состоит в том, что формальный четырехвалентный граф со структурой
противоположности ребер в вершинах не предполагается вложенным в какую-либо поверхность,
но при применении движения предполагается наличие локальной петли, двуугольника или треугольника.
Свободные узлы были впервые рассмотрены В. Г. Тураевым под названием гомотопических
классов гауссовых слов. В. Г. Тураев предположил их тривиальность. Одним из центральных методов настоящей монографии является метод четности. В узком смысле четность состоит в сопоставлении перекресткам свободного узла (виртуального узла) чисел 0 и 1 способом, правильным
образом согласованным с движениями Рейдемейстера. В широком смысле четность определяется для более широкого класса топологических объектов, задаваемых комбинаторно как классы
эквивалентности представителей с конечным числом узловых точек (линий) по движениям. Узловым точкам сопоставляются нули и единицы. Метод четности позволяет корректно определять
функториальные отображения, строить многие комбинаторные инварианты, усиливать имеющиеся инварианты. В частности, методом четности выявлены глубокие нетривиальные структуры на
свободных узлах.
Другая теория, изучаемая в настоящей монографии — теория граф-зацеплений. Каждой хордовой диаграмме соответствует граф пересечений. На такие графы пересечений формально переносятся движения Рейдемейстера. Однако аналогичным образом они переносятся и на графы,
графами пересечений не являющиеся. Возникает формальная теория, связанная с теорией классических и виртуальных узлов, но содержащая нечто большее в связи с наличием нереализуемых
графов (такой переход от виртуальных зацеплений к граф-зацеплениям аналогичен переходу от
классических узлов к виртуальным, в последнем случае мы разрешаем гауссовой диаграмме не
реализовывать плоский граф, в то время как в первом случае мы разрешаем графу не быть графом
пересечения хордовой диаграммы). Отметим, что есть два подхода к похожим теориям. Первый из
них относится только к однокомпонентным узлам и к гауссовым диаграммам — теория петлевых
графов Тральди и Цулли. Другая теория относится к поворачивающим обходам: любую связную
диаграмму виртуального зацепления можно обойти, поворачивая в каждом классическом перекрестке с ребра на не противоположное ему ребро (виртуальные перекрестки проходятся трансверсально). Это описание также кодируется хордовыми диаграммами, и переход к формальным
оснащенным графам, понимаемым в качестве графов пересечения хордовых диаграмм, приводит к
теории граф-зацеплений.
Граф-зацепления (как и петлевые графы) можно понимать как зацепления, имеющие перекрестки, но не имеющие ребер.
Поскольку при переходе от гауссовых диаграмм к графам пересечения теряется различие между узлами-мутантами, можно ожидать продолжения на граф-зацепления инвариантов, не меняющихся при мутациях. Построение инвариантов граф-зацеплений выявляет возможность по-новому
взглянуть на комбинаторику тех или иных инвариантов и в некоторых случаях проимитировать
4
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
наличие «геометрической» интерпретации там, где ее нет. Так, обобщение скобки Кауфмана на
граф-зацепления связано с подсчетом «несуществующих» окружностей в состояниях.
В настоящей работе с помощью метода четности построены многочисленные инварианты свободных узлов, доказаны теоремы минимальности. Кроме того, с помощью метода четности построены препятствия к срезанности свободных узлов — невозможности затягивания свободных узлов
диском.
Методы четности успешно работают и в теории граф-зацеплений. С помощью четности построены первые примеры граф-зацеплений, не эквивалентных реализуемым граф-зацеплениям. Используя комбинаторику матриц над Z2 , доказано, что теория граф-узлов (граф-зацеплений с одной
компонентой) эквивалентна теории гомотопий петлевых графов.
Наконец, построена теория гомологий Хованова с коэффициентами Z2 для граф-зацеплений и
теория нечетных гомологий Хованова с коэффициентами Z для некоторого частного случая графзацеплений. Эти работы показывают, как можно обойти препятствие к пониманию того, «как
перестраиваются несуществующие окружности в состояниях Кауфмана для граф-зацеплений».
Методы свободных узлов и четности приводят к различным инвариантам виртуальных узлов
для самых разнообразных четностей, а также к усилению инвариантов узлов и кобордизмов в
старших размерностях. Свободные узлы имеют естественные приложения к задачам о вложениях
графов в поверхности.
Методы теории граф-зацеплений в основном демонстрируют то, что многие объекты, которые
невозможно кодировать с помощью одномерного формализма (хордовых диаграмм), но можно кодировать комбинаторно (с помощью графов пересечения) тем не менее можно допускают обобщение
комбинаторных инвариантов, связанных с хордовыми диаграммами.
2.
БЛАГОДАРНОСТИ
Авторы выражают благодарность О. В. Мантурову, В. А. Васильеву, А. Т. Фоменко, О. Я. Виро
и В. В. Чернову за полезные советы и постоянное внимание к работе.
Авторы особенно благодарны П. Кан за ряд дискуссий по плоским виртуальным зацеплениям
и кривым на поверхностях, рассматриваемым с точностью до гомотопий и стабилизаций, и за
указание ссылки на работу [69].
Работа первого автора выполнена при частичной финансовой поддержке гранта РФФИ (проект № 10-01-00748-а), гранта Президента РФ поддержки Ведущих научных школ (проект НШ3224.2010.1), программы Развитие научного потенциала высшей школы (проект 2.1.1.3704),
Программ Научные и научно-педагогические кадры инновационной России (госконтракты
02.740.11.5213 и 14.740.11.0794), Федеральным агентством по образованию НК-421П/108. Второй
автор частично поддержан грантом Президента РФ поддержки Ведущих научных школ (проект
№ НШ-3224.2010.1), Аналитической ведомственной целевой программой «Развитие научного потенциала высшей школы», Программой Научные и научно-педагогические кадры инновационной
России (госконтракт 14.740.11.0794). Работа третьего автора выполнена при частичной финансовой поддержке гранта РФФИ (проект № 10-01-00748-а), гранта Президента РФ поддержки
Ведущих научных школ (проект № НШ-3224.2010.1), программы Развитие научного потенциала
высшей школы, проект 2.1.1.3704, Программ Научные и научно-педагогические кадры инновационной России (госконтракты 02.740.11.5213 и 14.740.11.0794).
3.
ВВЕДЕНИЕ. ОСНОВНЫЕ
ПОНЯТИЯ
3.1. Классические узлы. (Классический) узел представляет собой образ гладкого вложения
окружности S 1 в сферу S 3 (или в R3 ); два узла называются изотопными, если один из них
может быть получен из другого диффеоморфным отображением объемлющего пространства S 3
(или R3 ) на себя, сохраняющим ориентацию сферы S 3 (или R3 ) (изотопия) (общеизвестно, что
каждый из таких диффеоморфизмов гладко гомотопен тождественному в классе гладких диффеоморфизмов [33]). Если мы вкладываем в сферу S 3 (или R3 ) несвязное объединение нескольких
окружностей S 1 ⊔ · · · ⊔ S 1 , то говорят о классическом зацеплении; образ каждой окружности —
узел — называется компонентой зацепления. Узлом также называют само вложение. Классификация узлов в S 3 эквивалентна классификации узлов в R3 . В случае, если фиксирована ориентация
окружности S 1 , говорят об ориентированном узле (соответственно, в случае ориентированного
3. Введение. Основные понятия
@
@
5
переход
@ проход
@
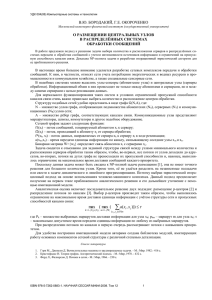
РИС. 1. Локальная структура перекрестка
зацепления требуется ориентация окружностей — прообразов компонент зацепления); в случае
изотопии ориентированных зацеплений требуется, чтобы диффеоморфизм объемлющего пространства сохранял как ориентацию сферы S 3 (или R3 ), так и ориентации всех компонент.
Если компоненты зацепления перенумеровать и при изотопии потребовать, чтобы номера компонент сохранялись, то мы получим крашеные зацепления.
Обычно узлы кодируются плоскими диаграммами, которые являются четырехвалентными графами с дополнительной структурой. Приведем основные определения, касающиеся четырехвалентных
графов и плоских диаграмм узлов.
Пусть G — произвольный граф с множеством вершин V(G) и множеством ребер E(G). Под ребром мы будем понимать класс эквивалентности двух полуребер, которые его составляют. Вершина
v ∈ V(G) имеет степень, равную k, если v инцидентна k полуребрам. Граф, все вершины которого
имеют степень k, называется k-валентным или просто k-графом. Для любого k свободная петля,
т.е. граф без вершин с одним циклическим ребром, рассматривается как k-граф.
Определение 3.1. 4-Граф называется оснащенным, если в каждой вершине графа четыре исходящих из нее полуребра разбиты на два семейства полуребер, т.е. задана структура противоположных ребер. Полуребра из одного семейства называются (формально) противоположными.
Определение 3.2. Под изоморфизмом оснащенных 4-графов мы всегда будем понимать изоморфизм, сохраняющий оснащение. Обозначим через G0 оснащенный 4-граф, представляющий
собой одну окружность.
При изображении оснащенных 4-графов на плоскости мы всегда предполагаем, что структура
противоположных полуребер в вершинах наследуется из плоскости R2 .
Пусть дан узел, т.е. образ отображения f : S 1 → R3 . Плоские диаграммы, соответствующие
данному узлу, строятся следующим образом. Рассмотрим некоторую плоскость h ⊂ R3 (скажем,
h = Oxy) и проекцию узла на нее. Без ограничения общности можно считать, что проекция узла
на плоскость представляет собой вложенный конечный оснащенный 4-граф, являющийся образом
гладкого погружения окружности в плоскость. Обычно мы будем называть отрезок узла (т.е.
образ в трехмерном пространстве отрезка — части окружности) его ветвью. Иногда (когда из
контекста ясно, о чем идет речь) ветвью мы будем называть также проекцию ветви на плоскость.
Каждая вершина графа проекции (называемая перекрестком диаграммы зацепления) снабжена
следующей дополнительной структурой (помимо структуры противоположных ребер). Пусть a, b
— две ветви узла, проекции которых пересекаются в точке v. Так как a и b не пересекаются в
R3 , два прообраза точки v имеют различные z-координаты. Таким образом, мы можем сказать,
какая ветвь (a или b) проходит сверху (образует переход); а какая — снизу (образует проход), см.
рис. 1. Ребра переходов изображаются сплошными линиями, в то время как проход изображается
линией, имеющей разрыв в перекрестке. Такое изображение узла на плоскости называется плоской
диаграммой узла.
Все перекрестки диаграммы ориентированного зацепления делятся на положительные
и
отрицательные
. Легко проверить, что в случае диаграммы узла знак перекрестка не зависит
от ориентации узла.
Плоская диаграмма зацепления называется альтернированной, если при движении вдоль любой
из ее компонент проходы чередуются с переходами.
Простейшие примеры диаграмм классических узлов изображены на рис. 2. Первые две диаграммы представляют собой тривиальный узел, на третьей диаграмме изображен трилистник,
на четвертой диаграмме — восьмерка. Все эти диаграммы являются альтернированными.
Назовем дугами диаграммы компоненты связности диаграммы (при этом ветвь прохода предполагается разрывной, как и изображается на рисунках).
6
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
1
3
2
4
РИС. 2. Простейшие узлы
1
2
3
РИС. 3. Движения Рейдемейстера Ω1 , Ω2 , Ω3
Определение 3.3. Оснащенный 4-граф проекции без указания структуры проходов и переходов
называется тенью узла. Сложностью узла называется минимальное количество перекрестков
диаграмм узлов заданного изотопического типа. Будем далее называть диаграмму зацепления
связной, если таковой является ее тень. В частности, связной является любая диаграмма любого
узла.
В [190] Курт Рейдемейстер привел список локальных топологических перестроек (преобразований Рейдемейстера, известных ныне как движения Рейдемейстера). На рис. 3 приведены
основные из них, остальные получаются их комбинацией. Рейдемейстер доказал, что любые две
плоские диаграммы задают одно и то же зацепление тогда и только тогда, когда они могут быть
получены друг из друга конечной последовательностью этих движений, а также плоской изотопии — преобразования диаграммы посредством диффеоморфизма плоскости на себя, сохраняющего
ориентацию плоскости. Это позволяет рассматривать изотопические классы узлов как комбинаторные объекты: они представляют собой классы эквивалентности плоских диаграмм по движениям
Рейдемейстера.
Доказательство инвариантности тех или иных функций на узлах (задаваемых на диаграммах
узлов) основывается часто на проверке инвариантности относительно движений Рейдемейстера.
Рассмотрим комбинаторное представление диаграмм классического узла, а именно, мы построим эйлеров цикл (более точное определение см. ниже) специального вида для диаграммы узла,
которые являются связными 4-графами, и соответствующую хордовую диаграмму, хорды которой
будут снабжены дополнительной информацией.
3. Введение. Основные понятия
7
2
3
1
+
1
2
+
1
+
3
2
3
РИС. 4. Гауссова диаграмма правого трилистника
Определение 3.4. Хордовая диаграмма — это 3-граф, состоящий из выбранного неориентированного гамильтонового цикла (окружности) и неориентированных ребер (хорд), соединяющих
точки на окружности, причем разные хорды не имеют общих точек на окружности.
Мы назовем две хорды зацепленными, если концы одной хорды лежат в разных связных компонентах множества, полученного из S 1 удалением концов другой хорды. В противном случае хорды
называются незацепленными.
Замечание 3.1. Хордовые диаграммы, как правило, изображаются в виде стандартной евклидовой окружности с конечным множеством ее хорд (точки пересечения хорд вершинами, конечно,
не являются).
Мы также будем рассматривать ориентированные хордовые диаграммы, т.е. хордовые диаграммы, у которых окружность ориентирована. В этом случае мы рассматриваем хордовые диаграммы
с точностью до изоморфизма графов, сохраняющего ориентацию окружности.
Каждой диаграмме классического узла можно поставить в соответствие хордовую диаграмму с
дополнительной структурой — гауссову диаграмму [185].
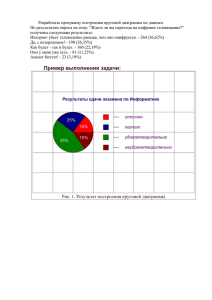
Определение 3.5. Пусть K — плоская диаграмма ориентированного классического узла, на
которой выбрана произвольная точка, не совпадающая с вершиной диаграммы. Гауссовой диаграммой G(K), соответствующей диаграмме K, называется хордовая диаграмма, состоящая из
ориентированной окружности (с фиксированной точкой), на которой прообразы прохода и перехода для каждого перекрестка соединены стрелкой, направленной от прообраза перехода к прообразу
прохода. Каждая стрелка снабжена знаком, который совпадает со знаком перекрестка, т.е. равен
единице для перекрестка вида
и минус единице для
.
Так, для классического правого трилистника гауссова диаграмма выглядит следующим образом,
см. рис. 4.
Не трудно переписать движения Рейдемейстера на язык гауссовых диаграмм. В результате
мы можем думать об узле, как о классе эквивалентности гауссовых диаграмм по формальным
движениям.
Если мы рассмотрим произвольную хордовую диаграмму и попробуем нарисовать для нее диаграмму классического узла (для какого-либо задания ориентации хорд и каких-либо знаков), то
в большинстве случаев мы потерпим неудачу, см. [27, 28, 142, 189]. Рассмотрим хордовую диаграмму D, изображенную на рис. 5. Легко видеть, что не существует диаграммы узла, гауссова
диаграмма которой совпадала бы с хордовой диаграммой D с какой бы то ни было расстановкой
стрелок и знаков [103].
Рассматривая любую хордовую диаграмму (со стрелками и знаками) как гауссову диаграмму и
движения Рейдемейстера как движения на всех хордовых диаграммах, мы получим новую теорию
— теорию виртуальных узлов [66].
3.2. Виртуальные узлы. В [103] Луис Кауфман ввел понятие виртуального узла (или — в
случае многих компонент — виртуального зацепления). Виртуальный узел представляет собой
естественное комбинаторное обобщение обычного понятия узла: вводится новый тип перекрестка и пополняется список движений Рейдемейстера. Новый тип перекрестка (который называется
виртуальным и изображается кружочком) не следует трактовать ни как переход одной ветви
8
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 5. «Нереализуемая» хордовая диаграмма
РИС. 6. Объезд
над другой, ни как проход одной ветви под другой (его следует понимать как диаграмматическое изображение на плоскости двух «далеко отстоящих» частей узла (зацепления), пересечение
которых является «дефектом изображения»), см. рис. 6. В этом смысле естественным является
следующий выбор обобщенных движений Рейдемейстера: все обычные движения Рейдемейстера,
относящиеся к классическим перекресткам, а также движение объезда. Последнее состоит в том,
что ветвь диаграммы узла, содержащая последовательно несколько виртуальных перекрестков, но
не содержащая классических перекрестков, может быть преобразована в любую другую ветвь с
теми же начальной и конечной точками; на месте новых пересечений и самопересечений ставятся
виртуальные перекрестки, см. рис. 6.
Определение 3.6. Виртуальной диаграммой (или диаграммой виртуального зацепления) называется погружение (также и образ погружения) общего положения оснащенного 4-графа в R2 ,
у которого образ каждой вершины снабжен структурой классического перекрестка, т.е. указано,
какая ветвь (пара противоположных ребер) проходит выше, а какая — ниже; при изображении на
плоскости точки пересечения образов различных ребер оснащенного 4-графа называются виртуальными перекрестками и обозначаются кружочком.
Виртуальная диаграмма называется связной, если связен соответствующий оснащенный 4-граф.
Виртуальное зацепление — это класс эквивалентности виртуальных диаграмм по виртуальным движениям Рейдемейстера, которые включают в себя обычные движения Рейдемейстера и
движение объезда.
То есть фактически для задания виртуального узла нам нужно лишь знать, как расположены
классические перекрестки, и как они между собой соединяются, при этом нам не важно, как
расположены пути, идущие между классическими перекрестками, пересекаются ли они и имеют
ли точки самопересечения.
Подобно классическому зацеплению, виртуальное зацепление обладает некоторым количеством
компонент.
Виртуальный узел — это виртуальное зацепление с одной уникурсальной компонентой.
Компоненты виртуального зацепления можно описать комбинаторно, исходя из виртуальной
диаграммы.
Под уникурсальной компонентой диаграммы виртуального зацепления понимается следующее.
Рассмотрим виртуальную диаграмму L как одномерный комплекс на плоскости. Часть связных
компонент этого комплекса представляет собой окружности; каждую такую компоненту назовем
3. Введение. Основные понятия
9
(уникурсальной) компонентой зацепления. Оставшаяся часть представляет собой четырехвалентный граф Γ с вершинами в классических и виртуальных перекрестках. Уникурсальной компонентой диаграммы назовем также (помимо компонент-окружностей) классы эквивалентности на
множестве ребер графа: два ребра e, e′ считаются эквивалентными, если существует набор ребер
e = e1 , . . . , ek = e′ и набор вершин v1 , . . . , vk−1 (некоторые из которых, быть может, совпадают)
графа Γ такие, что ребра ei , ei+1 подходят к вершине vi с противоположных сторон.
Числом закрученности w(L) виртуальной диаграммы L называется количество положительных
перекрестков
минус количество отрицательных перекрестков
.
Легко видеть, что количество компонент диаграммы зацепления является инвариантным при
обобщенных движениях Рейдемейстера. В классическом случае это определение компонент зацепления согласуется с приведенным ранее.
Замечание 3.2. Отметим, что такой подход — стандартные движения внутри локальной евклидовой области и движения типа объезда — был использован Н. Камадой и С. Камадой [91] для
построения формальных теорий многомерных «виртуальных узлов» и их инвариантов.
Ветви виртуального узла, имеющие виртуальное пересечение, относящиеся к двум «далеко отстоящим» частям узла, могут свободно двигаться по поверхности независимо одна от другой. Это
приводит к определению виртуальных узлов как узлов в утолщенных ориентированных поверхностях S × I, где S — двумерная ориентированная замкнутая поверхность, а I = [0, 1] — отрезок с
фиксированной ориентацией; при этом утолщенные поверхности должны рассматриваться с точностью до стабилизации, т.е. с точностью до добавления и удаления ручек к поверхности S так,
чтобы добавляемые утолщенные ручки не затрагивали соответствующего узла.
Здесь и далее предполагается, что на утолщенной поверхности S × I фиксирована структура
прямого произведения и указано, какой край является верхним — край S ×{1}, а какой — нижним,
край S × {0}.
В случае зацепления нужно разрешать также несвязные поверхности S1 ⊔ · · · ⊔ Sk (при этом
иногда требуют, чтобы в каждом многообразии Sj × I лежала по крайней мере одна компонента
виртуального зацепления, [120]). Зацепления в S × I описываются диаграммами на S с проходами и переходами. В этом смысле виртуальные диаграммы получаются с помощью регулярных
проекций общего положения диаграмм c поверхности S на плоскость: перекрестки переходят в
классические перекрестки, а новые пересечения (дефекты проекции) отмечаются виртуальными
перекрестками; при этом требуется, чтобы при регулярной проекции окрестности классических
перекрестков проектировались на ориентированную плоскость с сохранением ориентации. Движения Рейдемейстера для диаграмм на S (те же, что и в случае классических диаграмм узлов)
соответствуют классическим движениям Рейдемейстера для виртуальных диаграмм; существуют
также преобразования, которые не меняют комбинаторной структуры диаграммы на S, но меняют
комбинаторную структуру проекции на плоскость: им соответствует движение объезда.
Теорема об эквивалентности различных определений виртуальных узлов была анонсирована в
работе [99] и доказана различными авторами, в том числе Кауфманом. Полное подробное доказательство можно найти, например, в [131].
Реализация движений объезда движениями на утолщенных поверхностях и их проекциями
изображена на рис. 7.
Это подводит нас к локальным версиям движения объезда, которые состоят из:
1. Чисто виртуальных движений Рейдемейстера Ω′1 , Ω′2 , Ω′3 , которые получаются из классических движений Рейдемейстера заменой всех участвующих в них классических перекрестков
виртуальными перекрестками, см. рис. 8.
2. Полувиртуальной версии Ω′′3 третьего движения Рейдемейстера, которая состоит в том, что
дуга, содержащая два виртуальных перекрестка, может быть перенесена сквозь классический
перекресток, см. рис. 9.
Назовем увеличивающим тот из вариантов движения Рейдемейстера, который увеличивает количество перекрестков (классических в классическом случае и виртуальных — в виртуальном).
Так, движения Ω1 , Ω2 , Ω′1 , Ω′2 «в одну сторону» являются увеличивающими, а «в другую сторону»
— уменьшающими.
Очевидно следующее
10
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Sg
Sg
Sg
Sg
R2
R2
R2
R2
Первое виртуальное
движение Рейдемейстера
Полувиртуальное движение
Sg
Sg
Sg
Sg
R2
R2
Второе виртуальное
R2
R2
движение Рейдемейстера Третье виртуальное движение Рейдемейстера
РИС. 7. Обобщенные движения Рейдемейстера и утолщенные поверхности
1
2
3
РИС. 8. Движения Ω′1 , Ω′2 , Ω′3
РИС. 9. Полувиртуальная версия Ω′′3
Утверждение 3.1. Две виртуальные диаграммы L и L′ получаются друг из друга последовательным применением движений объезда тогда и только тогда, когда они получаются одна
из другой последовательным применением движений Ω′1 , Ω′2 , Ω′3 , Ω′′3 и обратными к ним.
3. Введение. Основные понятия
11
РИС. 10. Поднятие виртуального перекрестка на ручку
РИС. 11. Объезд и стабилизация
Восстановление диаграммы узла в утолщенной поверхности по виртуальной диаграмме на плоскости происходит следующим образом.
Пусть L — диаграмма виртуального зацепления на сфере S 2 (мы компактифицируем плоскость
2
R одной точкой). Каждый виртуальный перекресток этой диаграммы соответствует пересечению
двух дуг. Выберем одну из них и создадим для ее поднятия «ручку», см. рис. 10. В итоге мы
получим диаграмму (с проходами, переходами и виртуальными перекрестками) на торе, у которой
количество виртуальных перекрестков на единицу меньше, чем у изначальной диаграммы.
Отметим, что выбор расположения этой ручки — сверху или снизу — несуществен, так как
утолщенный поверхности рассматриваются нами сами по себе вне конкретного вложения в R3 .
Легко проверяется также, что несуществен и выбор той из двух дуг, которая «поднимается»
на вновь создаваемую ручку — две картинки-диаграммы L1 и L2 , соответствующие таким двум
поднятиям на поверхности с ручками M1 и M2 , т.е. L1 ⊂ M1 и L2 ⊂ M2 , будут комбинаторно–
эквивалентны (т.е. существует гомеоморфизм f : M1 → M2 одного поднятия на другое, переводящий одну виртуальную диаграмму с перекрестками в другую f (L1 ) = L2 ).
Продолжая далее, мы можем избавиться ото всех виртуальных перекрестков и получить диаграмму на Sg (=Sg × { 12 } ⊂ Sg × [0, 1]) , где g — некоторое количество ручек. Здесь удобно
использовать движение объезда. Каждое такое движение состоит в «собирании» последовательно
расположенных ручек в одну и дроблении этой ручки на новые ручки, расположенные в других
местах, см. рис. 11.
В нижней части рис. 11 «собирание» (или, наоборот, дробление) состоит из элементарных
движений, которые как раз представляют собой дестабилизацию (соотв., стабилизацию). При этом
классические движения Рейдемейстера производятся локально на некоторой части поверхности Sg ,
происходящей из сферы посредством добавления ручек.
12
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 12. Скручивание Дена и движение Ω′1
F1
F2
РИС. 13. Запрещенные движения
Естественно, что поверхность Sg автоматически является ориентированной: ориентация для Sg
происходит из ориентации сферы S 2 , к которой приклеиваются ручки.
Отметим, что на поверхности Sg нет выделенной системы параллелей и меридианов. Действительно, при применении первого виртуального движения Рейдемейстера эта поверхность подвергается скручиваниям Дена, см. рис. 12.
Отметим, что два похожих на движения Рейдемейстера преобразования, показанные на рис. 13,
вообще говоря, не являются эквивалентностями виртуальных узлов. Они получили название запрещенных движений, см. рис. 13.
Оказывается (это независимо заметили Гусаров, Поляк, Виро [66] и Кауфман [99, 103]), что
при добавлении обоих запрещенных движений любые два виртуальных узла (но не зацепления!)
становятся эквивалентными. Если добавить только одно из этих движений, а другое оставить запрещенным, получится интересная теория трубчатых узлов. Эта теория была предложена Шином
Сато, [191], см. также [107].
Общеизвестно (доказательство, см., напр., в [131]), что каждый классический узел может быть
перестроен в тривиальный узел последовательной заменой перекрестков
⇐⇒
. Это является
отправной точкой для построения инвариантов узлов (скейн-модули, алгебры Конвея, полином Кауфмана, инварианты Васильева и др.). Для виртуальных узлов это утверждение неверно, а именно, разрешение замены типа классического перекрестка приводит к нетривиальной теории плоских
виртуальных узлов, см., напр., [91]. Ее можно формализовать следующим образом. Вместо любого классического перекрестка — прохода или перехода — мы используем один тип перекрестка,
называемый плоским (классическим); он изображается обыкновенным пересечением двух линий
на плоскости; кроме того, мы допускаем виртуальные перекрестки. Движения Рейдемейстера для
плоских виртуальных узлов изображены на рис. 14. Можно допустить дальнейшее упрощение и
получить новую нетривиальную теорию. А именно, профакторизуем теорию плоских виртуальных
узлов по новому движению — виртуализации, см. рис. 15. Получим новую теорию — теория
свободных узлов. Оказывается, что даже эта теория не является тривиальной, более подробно см.
п. 5.
3. Введение. Основные понятия
13
РИС. 14. Движения Рейдемейстера для плоских виртуальных узлов
РИС. 15. Виртуализация
РИС. 16. Простейший нетривиальный плоский виртуальный узел
Упрощение теории виртуальных узлов, при котором мы помним информацию только о числе
закрученности каждого перекрестка, называется теорией псевдоузлов. Если же мы помним информацию о том, какая ветвь проходит выше, а какая ниже, то эта теория называется теорией
квазиузлов, см. [214].
Простейший пример плоского виртуального узла, который не может быть сведен к тривиальному, изображен на рис. 16.
Виртуальные узлы поднимаются на «утолщенные» поверхности. Если не обращать внимание на
то, какая ветвь виртуального узла в классическом перекрестке проходит выше, а какая — ниже
(забыть про структуру проходов/переходов в классических перекрестках), мы получим естественное поднятие плоских виртуальных узлов на двумерные поверхности (утолщение не требуется).
Поднятие происходит в два этапа. Сначала по виртуальной диаграмме L мы строим поверхность с краем следующим образом. В каждом классическом перекрестке диаграммы зацепления
мы располагаем крест (верхняя часть рис. 17), а в каждом виртуальном перекрестке — пару
непересекающихся лент (нижняя картинка), ср. [91]. Соединяя эти кресты и ленты лентами (не
перекрученными), идущими вдоль дуг зацепления, мы получаем ориентируемое двумерное многообразие с краем, которое мы обозначим через M ′ .
14
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
@
@
@
@
@@
−→
@
@
@
@
@
@
@
@
@
@
−→
@@
@ d
@
@
@
@
@
@
@
РИС. 17. Локальная структура поверхности M ′
Естественным образом проекция диаграммы зацепления L отображается в M ′ так, что дуги
диаграммы отображаются в средние линии лент, а классические (плоские) перекрестки соответствуют перекресткам внутри крестов. Следовательно, мы получаем набор кривых δ ⊂ M ′ . Заклеивая дисками граничные компоненты многообразия M ′ , мы получаем ориентируемое многообразие
M = M (L) без края с набором кривых δ, погруженных в него.
Это приводит нас к теореме, см., напр., [91].
Теорема 3.1. Плоские виртуальные зацепления — это классы эквивалентности конечных
наборов ориентированных кривых в двумерных поверхностях, рассмотренных с точностью до
свободной гомотопии, стабилизации и дестабилизации.
Вопрос о том, являются ли два таких задания плоского виртуального зацепления эквивалентными в категории плоских виртуальных узлов распознается алгоритмически.
Пусть S — ориентируемая замкнутая двумерная поверхность рода g. В работе [69], указанной
нам П. Кан, Дж. Хасс и П. Скотт показали, что если на поверхности S мы имеем две гомотопные
кривые, количество точек самопересечений которых минимально, то эти две кривые можно связать
только третьими движениями Рейдемейстера.
Докажем следующую теорему.
Теорема 3.2. Плоский узел имеет единственного минимального (в смысле рода поверхности) представителя (S, D) (замкнутая ориентируемая двумерная поверхность, кривая на
ней) с точностью до диффеоморфизма (f : (S, D) → (S ′ , D′ ), D′ = f (D)) и гомотопии узла на
поверхности.
Как следствие этой теоремы (используя результаты Дж. Хасса и П. Скотта) мы получим
Следствие 3.1. Плоский узел имеет единственного минимального представителя (в смысле
рода поверхности и количества перекрестков) с точностью до диффеоморфизма и третьего
движения.
Доказательство теоремы 3.2 примерно повторяет доказательство теоремы Куперберга [120].
Докажем от противного. Пусть дан плоский узел, и пусть (S, D) — минимальный (по роду
поверхности) представитель этого узла, который можно дестабилизациями и движениями Рейдемейстера привести к разным минимальным представителям. Следовательно, на поверхности S
существуют две диаграммы D1 , D2 , гомотопные диаграмме D, и нетривиальные замкнутые две
кривые γ1 , γ2 такие, что Di ∩ γi = ∅, i = 1, 2, и дестабилизация вдоль γi (разрезание по циклу и
заклеивание краев дисками) приводит к разным минимумам. Заметим, что по выбору представителя (S, D) у результата дестабилизации (Si , Di′ ) для каждого i = 1, 2 минимум уже единственный.
e D).
e
Покажем, что (Si , Di′ ), i = 1, 2, можно дестабилизировать к общей плоской диаграмме (S,
′
′
e
e
Тогда минимумы у (S1 , D1 ) и (S2 , D2 ) будут совпадать с минимумом для (S, D), и получится
противоречие.
Пусть D0 — минимальный по числу перекрестков представитель D на S. Воспользуемся следующей леммой
3. Введение. Основные понятия
15
2
+
2
1
1
+
1
2
РИС. 18. Гауссова диаграмма виртуального узла
Лемма 3.1. Пусть D и D′ — диаграммы на S, причем D′ получается из D конечной последовательностью уменьшающих первых и вторых движений Рейдемейстера, а также третьих
движений и изотопий. Пусть γ — нестягиваемая замкнутая кривая такая, что γ ∩ D = ∅.
Тогда γ можно изотопировать одновременно с диаграммой D, чтобы кривая с диаграммой не
пересекались. В частности, существует кривая γ ′ , изотопная γ, такая, что γ ′ ∩ D′ = ∅.
Доказательство. Кривая γ лежит в нетривиальной (не гомеоморфной диску) компоненте S \ D.
Посмотрим, что происходит с компонентами при движениях. При первом, втором и третьем движениях исчезает тривиальная компонента дополнения (при третьем еще одна такая появляется),
остальные изотопируются. При изотопии все компоненты изотопируются. Значит, кривая при наших преобразованиях не затрагивается, и мы ее изотопируем вместе со всеми.
По лемме 3.2 можно считать, что D1 = D2 = D0 и D0 ∩ γi = ∅, i = 1, 2. Рассмотрим полную
дестабилизацию представителя (S, D0 ). Для этого заменим нетривиальные компоненты S \ D0 на
объединение дисков и заклеим дисками окружности, по которым эти компоненты примыкали к
узлу D0 . Это эквивалентно проведению последовательной дестабилизации по некоторому набору
непересекающихся нетривиальных кривых, лежащих в S \D0 . Ясно, что можно выбрать этот набор
e D)
e полутак, чтобы он включал кривые γi . Следовательно, результат полной дестабилизации (S,
чается дальнейшей дестабилизацией (Si , Di′ ) (по остальным кривым набора). Что и требовалось.
Теорема 3.2 доказана.
Как было отмечено выше, произвольные гауссовы диаграммы, вообще говоря, могут не быть
реализованы в виде вложений оснащенных 4-графов в плоскость, но можно их реализовать посредством погружений общего положения, отмечая точки, имеющие больше одного прообраза (в
случае общего положения — ровно два прообраза), виртуальными перекрестками, см. рис. 18.
Это естественным образом приводит к следующему определению виртуальных узлов (не зацеплений): нужно рассмотреть все формальные гауссовы диаграммы и формально описать движения
Рейдемейстера (как в случае классических диаграмм): они будут представлять собой комбинаторные схемы преобразований гауссовых диаграмм. В этом случае классы эквивалентности гауссовых
диаграмм по формальным движениям Рейдемейстера и будут представлять виртуальные узлы.
Отметим, что нам не понадобится движение объезда, так как гауссова диаграмма «не знает» ничего о расположении виртуальных перекрестков на плоскости, а «знает» лишь о расположении
классических перекрестков и о том, как они соединены между собой. Это означает, что гауссовы
диаграммы чувствительны только к классическим движениям Рейдемейстера и нечувствительны
к движениям объезда. Точный список движений Рейдемейстера для гауссовых диаграмм мы приводим в пп. 5 и 7. Далее это послужит для построения новой теории — теории граф-зацеплений,
см. п. 7.
3.3. Скобка Кауфмана и индекс самозацепления. Приведем здесь два примера инварианта
виртуальных узлов. Первый инвариант — это скобка Кауфмана. В последующих разделах мы
усилим этот инвариант, используя понятие четности, и обобщим его на новые комбинаторные
объекта.
Второй инвариант, рассмотренный здесь, принадлежит Кауфману и основан на понятии четности. Этот инвариант является первым, в котором используется четность. Как мы увидим далее
(п. 5), понятие четности дает глубокие, важные и интересные результаты.
16
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Рассмотрим неориентированную диаграмму L виртуального зацепления с n классическими перекрестками. Каждый из перекрестков диаграммы L можно развести одним из двух способов:
положительным A :
→
или отрицательным B :
→
. Выбор разведения всех перекрестков называется состоянием диаграммы. Таким образом, диаграмма L имеет 2n состояний. После
разведения диаграммы согласно некоторому состоянию, мы получим диаграмму виртуального зацепления без классических перекрестков. Таким образом, получаемое виртуальное зацепление
будет тривиальным. Сопоставим каждому состоянию s три числа: α(s) — число классических
перекрестков, разведенных способом A, β(s) = (n − α(s)) — число классических перекрестков,
разведенных способом B и γ(s) — число компонент (тривиального) зацепления в состоянии s.
Определим скобку Кауфмана [99] ⟨·⟩ неориентированной диаграммы L по формуле:
∑
aα(s)−β(s) (−a2 − a−2 )(γ(s)−1) ,
⟨L⟩ =
s
где сумма берется по всем состояниям s диаграммы L.
Скобка Кауфмана инвариантна относительно всех обобщенных движений Рейдемейстера, за
исключением первого классического движения Рейдемейстера Ω1 .
Из определения следует, что скобка Кауфмана удовлетворяет соотношению
⟨
⟩ = a⟨
⟩ + a−1 ⟨
⟩.
Определение 3.7. Назовем длиной полинома Лорана P (x) одной переменной x разность между
показателями старшей и младшей степеней мономов, входящих в него с ненулевыми коэффициентами. Обозначение: spanP (x).
Отметим, что длина скобки Кауфмана инварианта при всех движениях Рейдемейстера.
Скобка Кауфмана, которая является «почти» инвариантом неориентированных виртуальных зацеплений, приводит к построению инварианта ориентированных виртуальных зацеплений.
Для этого ее нужно нормировать следующим образом. Пусть L — ориентированная виртуальная
диаграмма. Положим
X(L) = (−a)−3w(L) ⟨|L|⟩,
где w(L) — число закрученности диаграммы L, а |L| — неориентированная диаграмма, получаемая
из L забыванием ориентации.
Известно [99], что таким образом мы получаем инвариантный полином (полином Лорана) ориентированных зацеплений, который называется полиномом Джонса-Кауфмана [85]. По полиному
Джонса-Кауфмана зацеплений можно судить о следующем:
1. Является ли зацепление классическим?
2. Каким может быть род зацепления (в смысле атома, см. определение на стр. 18)?
3. Каким может быть количество перекрестков диаграммы данного зацепления (оценка снизу)?
Построим второй инвариант.
Определение 3.8. Пусть K — диаграмма ориентированного виртуального узла. Мы назовем
классический перекресток диаграммы K нечетным, если в гауссовой диаграмме для K количество
хорд, зацепленных с соответствующей хордой, нечетно.
Положим
J(K) = w(K)|Odd(K) ,
где Odd(K) обозначает набор нечетных перекрестков диаграммы K, при этом ограничение числа закрученности w(K) на Odd(K), обозначаемое через w(K)|Odd(K) , равно сумме знаков всех
нечетных перекрестков диаграммы K. Тогда несложно показать, что J(K) является инвариантом виртуального узла (зацепления) K. Назовем J(K) индексом самозацепления виртуальной
диаграммы K. Этот инвариант прост, но достаточно силен.
Если узел K является классическим, то J(K) = 0, так как классические диаграммы не имеют
нечетных перекрестков.
3. Введение. Основные понятия
a
b
17
a
b
c
K
E
РИС. 19. Виртуальный трилистник K и виртуальная восьмерка E
a
c
d
b
K’
РИС. 20. Узел K ′
Теорема 3.3. Пусть K — виртуальный узел, и пусть K ∗ обозначает зеркальный образ узла
K (полученный заменой всех типов классических перекрестков диаграммы K). Тогда имеет
место
J(K ∗ ) = −J(K).
Таким образом, если J(K) ̸= 0, то узел K неэквивалентен своему зеркальному образу. Если K
— виртуальный узел, а J(K) не равно нулю, то узел K не эквивалентен никакому классическому
узлу.
Мы оставляем доказательство этой теоремы, а также доказательство инвариантности J(K)
читателю. За подробностями мы отсылаем читателя к [102].
Рассмотрим рис. 19. Два виртуальных узла на этом рисунке представляют собой область применения теоремы 3.3. В случае узла K оба перекрестка являются нечетными, поэтому мы имеем
J(K) = 2. Это доказывает, что узел K нетривиален, неклассичен и неэквивалентен своему зеркальному образу. Аналогично для виртуального узла E перекрестки a и b являются нечетными.
Мы имеем J(E) = 2, откуда следует, что узел E также нетривиален, неклассичен и неэквивалентен своему зеркальному образу. Заметим, что для узла E значение инварианта не зависит от типа
перекрестка c.
Обратимся к рис. 20. Виртуальный узел K ′ имеет J(K ′ ) = 2. Заметим, что K ′ развязывается,
если мы допустим второе (на рис. 13 снизу) запрещенное движение. Этот пример подчеркивает,
почему мы запрещаем такие движения в виртуальной теории узлов.
3.4. Атомы и виртуальные узлы. Атомы были первоначально введены А. Т. Фоменко [56] для
классификации гамильтоновых систем малой сложности. Как оказалось в дальнейшем, атомы
играют важную роль в теории узлов и маломерной топологии, см. работы [131, 142, 146, 166] и
ссылки в них.
Определение 3.9. Атомом называется пара (M, Γ), состоящая из двумерного замкнутого многообразия M и оснащенного четырехвалентного графа Γ ⊂ M такого, что M \Γ представляет собой
несвязное объединение двумерных клеток, покрашенных в два цвета — черный и белый — таким
образом, что клетки, инцидентные одному ребру графа Γ, имеют разные цвета.
Граф Γ называется остовом атома (M, Γ).
Атомы рассматриваются с точностью до естественной эквивалентности: гомеоморфизмов двумерных многообразий, переводящих остов в остов и согласованных с раскраской клеток.
Каждый атом (более точно, его класс эквивалентности) может быть полностью восстановлен по
следующим комбинаторным данным:
18
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
1. остов (4-граф);
2. A–структура или структура противоположных ребер (делящая четыре полуребра, исходящие из каждой вершины, на две пары, называемые противоположными; отношение противоположности определяется в соответствии с расположением полуребер на поверхности)
и
3. B–структура (в каждой вершине выделены две пары соседних полуребер (или двух углов),
которые входят в границу одной черной клетки).
Атом (M, Γ) называют связным (ориентируемым), если M связно (ориентируемо) как многообразие. Родом атома (M, Γ) называют род поверхности M . Вершиной (ребром) атома называют
вершину (ребро) его остова.
Замечание 3.3. В [207] В. Г. Тураев использовал схожую конструкцию (поэтому род атома в
некоторых источниках, напр., [126], называют родом Тураева).
Если атом (M, Γ) не является ориентируемым, то можно рассмотреть его ориентирующее наf, Γ),
e являющийся прообразом пары (M, Γ) при двулистном ориентирующем
крытие, т.е. атом, (M
f, Γ)
e как два отдельно
накрытии; в случае, когда атом (M, Γ) ориентируем, определим атом (M
стоящих экземпляра атома (M, Γ) (с фиксированным изоморфизмом одного атома на другой).
Атомы удобны для описания зацеплений и виртуальных зацеплений.
Среди атомов выделяется класс высотных, которые соответствуют диаграммам классических
зацеплений. Согласно [128], назовем высотным такой атом, остов которого может быть вложен в
плоскость таким образом, что A–структура атома соответствует A–структуре, наследуемой атомом
из плоскости, т.е. в каждой вершине атома противоположные полуребра остаются противоположными при вложении остова на плоскость.
В общем случае высотностью h ориентируемого атома (M, Γ) называется минимальный род
ориентируемой поверхности S, в которую остов Γ атома может быть вложен с сохранением A–
структуры. Из определения атома следует, что высотность ориентируемого атома не превосходит
его рода: h(M, Γ) 6 g(M, Γ).
Остов каждого атома представляет собой оснащенный 4-граф: оснащение (соотношение противоположности полуребер) наследуется из вложения графа в двумерную поверхность. Иначе
можно сказать, что атом — это вложение оснащенного 4-графа (без циклических компонент) в
поверхность таким образом, чтобы связные компоненты дополнения к графу в поверхность были
клетками, допускающими шахматную раскраску.
Вопросам планарности оснащенных 4-графов (т.е. является ли данный оснащенный 4-граф остовом атома рода 0) посвящена работа [142], а вопросу о том, какой род может принимать атом в
зависимости от его остова — работа [146].
Пусть дана виртуальная диаграмма L, построим по ней атом At(L). Вершины атома At(L) соответствуют классическим перекресткам диаграммы L. Классические перекрестки диаграммы L
соединены друг с другом ветвями диаграммы L, которые могут пересекать друг друга только в
виртуальных перекрестках. В каждом классическом перекрестке мы имеем четыре исходящих полуребра e1 , e2 , e3 , e4 , занумерованные по часовой стрелке таким образом, что пара (e1 , e3 ) образует
проход, а пара (e2 , e4 ) — переход. Эти ребра соответствуют ребрам атома At(L), которые соединяют соответствующие вершины. При этом 1-циклы остова, к которым приклеиваются черные и
белые клетки устроены следующим образом. Граница 2-клетки — это поворачивающая окружность
на остове: окружность, которая проходит каждое ребро не более одного раза и в каждой вершине
поворачивает с ребра на соседнее (не противоположное). Черные клетки приклеиваются к углу,
образованному (e1 , e2 ) и (e3 , e4 ), а белые — к (e2 , e3 ) и (e1 , e4 ), см. рис. 21.
Назовем родом, ср. [199], виртуального зацепления L минимум значения g(M, Γ) по всем атомам (M, Γ), соответствующим диаграммам зацепления L, a высотностью — минимум значения
h(M, Γ) по всем атомам (M, Γ), соответствующим диаграммам зацепления L.
Из определения следует, что классические зацепления имеют высотность нуль. Действительно,
если зацепление является классическим, то его тень представляет собой вложенный в плоскость
четырехвалентный граф, который является остовом соответствующего атома. По построению A–
структура атома совпадает с A–структурой, индуцируемой из плоскости. Таким образом, всякой
классической диаграмме соответствует высотный атом.
3. Введение. Основные понятия
e3
e4
e2
e1
19
РИС. 21. Приклеивание клеток
Отметим, что обратная процедура построения виртуальной диаграммы по атому не является
однозначной: диаграмма виртуального зацепления определяется с точностью до движений объезда
и виртуализаций, см., напр., [131]. Последнее связано с тем обстоятельством, что оснащенность
остова атома еще не задает циклической структуры исходящих полуребер: так, зная, что полуребра
e1 , e3 противоположные, мы имеем два возможных циклических порядка для вложения окрестности этой вершины в плоскость: e1 , e2 , e3 , e4 и e1 , e4 , e3 , e2 . Соответствующие им диаграммы
виртуальных узлов отличаются друг от друга (движениями объезда и) виртуализациями.
Отметим, что виртуальные узлы с точностью до виртуализации — это псевдоузлы.
Пусть дан некоторый атом At. Предположим, что для A–структуры атома существует ориентация всех ребер атома At такая, что в каждой вершине по два противоположных ребра являются
исходящими, а два других — входящими.
Определение 3.10. Назовем такую структуру структурой источник-сток.
Замечание 3.4. Та же самая структура исследовалась в теории виртуальных узлов Н. Камадой, см., напр., [90]. Там эта структура называлась альтернированной ориентацией для графа,
который в настоящей работе называется остовом атома.
Предложение 3.1. [166] Остов атома допускает структуру источник-сток, тогда и только тогда, когда атом является ориентируемым.
Доказательство. Предположим, что A–структура атома обладает структурой источник-сток. Рассмотрим черные (послекритические) клетки этого атома. Мы зададим ориентацию всех черных
клеток таким образом, чтобы в каждой вершине атома две локальные ориентации, заданные черными клетками, примыкающими к этой вершине, были согласованы (т.е. в вершине соприкосновения двух черных клеток две ориентации, задаваемые подряд идущими ребрами, были либо обе
направлены по часовой стрелке, либо обе — против часовой стрелки). Легко видеть, что из этого
следует ориентируемость атома.
Граница каждой черной клетки атома представляет собой цикл, состоящий из подряд идущих
ребер, при этом каждое следующее ребро не является противоположным предыдущему согласно
A–структуре. Так как в каждой вершине выполнено условие источник-сток, то цикл является
ориентированным, т.е. представимым в виде отображения ориентированной окружности, при этом
ориентация ребер согласована с ориентацией окружности. Ориентация границы клетки задает
ориентацию и на внутренности этой клетки: для этого достаточно выбрать репер, первый вектор
которой ориентирован по одному из ребер границы, а второй направлен внутрь клетки. Проделаем
это для каждой черной клетки. Наличие структуры источник-сток в каждой вершине означает,
что ориентации клеток, соседствующих по вершине, согласованы. Ориентация легко продолжается
и на белые клетки.
Предположим теперь, что атом ориентирован. Фиксируем произвольную ориентацию атома произвольным образом и зададим ориентацию ребер атома таким образом, чтобы для каждой черной
клетки C и каждого ребра e, ей инцидентного, ориентация пары векторов ⃗e, ν была положительной, где ν — нормальный вектор, направленный от точки на ребре e внутрь клетки C, а ⃗e —
вектор, направленный вдоль ребра согласно выбранной ориентации.
20
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Очевидно, что полученная ориентация ребер будет задавать структуру источник-сток.
Замечание 3.5. Из предложения 3.1 следует, что если некоторый атом (M, Γ) с остовом Γ
ориентируем, то таковым является и любой другой атом (M ′ , Γ) с тем же остовом и той же
A–структурой.
4.
ЭЙЛЕРОВЫ
ЦИКЛЫ, ГАУССОВЫ ЦИКЛЫ И ПОВОРАЧИВАЮЩИЕ ОБХОДЫ
Настоящий раздел является подготовительным для раздела 7. Основной результат — это явная
формула, связывающая матрицы смежности поворачивающего обхода и гауссового цикла на
связном оснащенном 4-графе.
Каждый оснащенный 4-граф G имеет эйлеров цикл U , т.е. путь, проходящий по всем ребрам
графа G и притом только по одному разу. В каждой вершине графа мы имеем две возможности
ее прохождения: либо мы двигаемся с полуребра на противоположное ему полуребро, либо мы
двигаемся с полуребра на непротивоположное ему полуребро. Среди всех эйлеровых циклов на
оснащенном 4-графе G можно выделить два особых типа циклов: в эйлеровых циклах первого
типа мы каждую вершину проходим согласно первой возможности прохода через нее, а в эйлеровых циклах второго типа — согласно второй возможности, т.е. мы всегда двигаемся с полуребра
на непротивоположное ему полуребро. Нетрудно видеть, что на любом оснащенном 4-графе существует не более одного эйлерова цикла первого типа. Эйлеров цикл первого типа, если конечно
он существует, назовем гауссовым циклом,. Эйлеровы циклы второго типа (поворачивающие обходы, см. [121, 142, 146]) существуют на любом связном оснащенном 4-графе, и число их может
быть больше одного. Если мы рассмотрим проекцию узла, то она имеет гауссов цикл, а проекция
зацепления (не узла) не имеет гауссова цикла.
Имея эйлеров цикл на оснащенном 4-графе, мы можем построить хордовую диаграмму, соответствующую этому циклу. Мы соединяем на окружности хордами прообразы всех вершин, т.е.
каждой вершине соответствует одна хорда.
В маломерной топологии оба подхода, подход с помощью гауссова цикла и подход с помощью
поворачивающего обхода, широко используются. Подход с помощью гауссова цикла применяется
в теории узлов, а именно, в построении инвариантов конечного порядка, инвариантов Васильева [12, 36, 66], и в вопросах планарности погруженной кривой, см. [27, 28, 189]. Однако для
определения планарности оснащенного 4-графа более удобно пользоваться поворачивающим обходом, см. [142, 146, 189]. Критерий планарности для погруженной кривой, которая является
оснащенным 4-графом, формулируется очень просто: погруженная кривая планарна тогда и только
тогда, когда хордовая диаграмма какого-то, а, следовательно, и произвольного поворачивающего
обхода является d-диаграммой, т.е. хордовой диаграммой, хорды которой допускают разбиение на
два семейства таким образом, чтобы хорды из одного семейства не были зацеплены друг с другом
(более точное определение см. ниже), [131, 189]. Если мы хотим обобщить вопрос планарности и рассматривать вопрос нахождения минимального рода двумерной замкнутой ориентируемой
поверхности, в которую может быть вложена заданная кривая, то подход с помощью поворачивающего обхода тоже более удобен. Существует критерий, дающий ответ на вопрос о минимальности
рода, см. [146].
Так как существует много поворачивающих обходов, соответствующие одному и тому же гауссову циклу, любые свойства гауссова цикла могут быть определены из любого поворачивающего
обхода [77]. Следовательно, эти свойства не зависят от способа выбора поворачивающего обхода. Например, если один из поворачивающих обходов является d-диаграммой, то остальные тоже
являются d-диаграммами. Таким образом, встает вопрос о получении явной формулы, позволяющей нам получить гауссов цикл из произвольного поворачивающего обхода и наоборот. Конечно,
имея оснащенный 4-граф, мы можем ответить на вопрос: существует или нет гауссов цикл на
нем? Мы можем просто двигаться вдоль графа, в каждой вершине мы имеем единственный способ
движения. Но этот метод в случае большего количества вершин не отражает явно комбинаторику эйлеровых циклов. В настоящем разделе мы приводим явную форму, которая зависит только
от матрицы смежности эйлерова цикла: беря произвольный эйлеров цикл и строя его матрицу
смежности, мы можем понять, имеет ли данный оснащенный 4-граф гауссов цикл и в случае
4. Гауссовы циклы и поворачивающие обходы
21
существования найти его матрицу смежности. Матрица смежности эйлерова цикла является симметрической матрицей, причем не каждая симметрическая матрица является матрицей смежности
некоторого эйлерова цикла. Оказывается, что приведенная далее формула верна для всех симметрических матриц. Исследуя данную формулу, мы можем получить некоторые интересные факты,
касающиеся симметрических матриц, см. п 7.
4.1. 4-Графы и эйлеровы циклы. Пусть H — произвольный (связный) 4-граф с множеством
вершин V(H), и пусть U — эйлеров цикл на графе H, т.е. путь, проходящий по всем ребрам
графа и притом только по одному разу. Опишем связь между двумя эйлеровыми циклами на
данном графе H.
Определим k-преобразование (Коциг [116]). Для каждой вершины v ∈ V(H) существуют в
точности два замкнутых пути Pv и Qv на U , не имеющих общих ребер, начинающихся и заканчивающихся в вершине v. Существует единственный эйлеров цикл, отличный от U , также
соединяющий пути Pv и Qv (если мы зададим произвольную ориентацию на эйлеровом цикле U ,
то на новом эйлеровом цикле мы двигаемся вдоль Pv согласно ориентации на U , а вдоль Qv — в
противоположном направлении). Обозначим через U ∗ v новый эйлеров цикл, полученный из U .
Преобразование U 7→ U ∗ v называется k-преобразованием.
Предложение 4.1 (см. [116]). Любые два эйлерова цикла на 4-графе связаны последовательностью k-преобразований.
Пусть w = x1 x2 . . . xk−1 xk — произвольное слово, т.е. конечная последовательность букв некоторого конечного алфавита. Зеркальный образ слова w — это слово w
e = xk xk−1 . . . x2 x1 .
Мы будем рассматривать классы эквивалентности слов, где любое слово из класса, порожденного словом x1 . . . xk , является или циклической перестановкой wi = xi xi+1 . . . xk x1 . . . xi−1 ,
1 6 i 6 k, слова x1 . . . xk , или зеркальным образом циклической перестановки слова wi . Мы
обозначим этот класс через (x1 . . . xk ) и назовем его циклическим словом.
Определение 4.1. Слово называется словом с двойным вхождением, если каждая его буква
встречается в нем ровно два раза.
Замечание 4.1. Когда мы рассматриваем циклическое слово с двойным вхождением, для нас
будет важно лишь расположение букв, соответствующих одной и той же вершине, а не их обозначение, см. [211].
Пример 4.1. Слово abccba является словом с двойным вхождением, а слово abccb не является
словом с двойным вхождением.
Очевидно, что зеркальный образ и циклическая перестановка слова с двойным вхождением
являются словами с двойным вхождением. Поэтому имеет смысл говорить о циклическом слове
с двойным вхождением. Каждое циклическое слово с двойным вхождением удобно изображать
хордовой диаграммой.
Пусть X — произвольное конечное множество, и m — произвольное циклическое слово с двойным вхождением, где буквы берутся из множества X. Тогда слово m имеет представление посредством хордовой диаграммы, которая строится последовательным расположением букв слова m
вдоль окружности S 1 , выбором точек на S 1 около каждого расположения буквы слова и соединением хордой каждой пары точек, соответствующих двум одинаковым буквам слова. Нетрудно
видеть, что мы получаем взаимно однозначное соответствие между множеством циклических слов
с двойным вхождением и множеством хордовых диаграмм.
Пример 4.2. Рассмотрим слово m = (abacdbcd). Слово m имеет хордовую диаграмму, изображенную на рис. 22.
Определим операцию ∗ на циклических словах с двойным вхождением, которая будет соответствовать k-преобразованию. Пусть m = (vAvB), где A, B — подслова слова m, и буквы принадe
e — зеркальный образ
лежат некоторому конечному алфавиту. Тогда положим m ∗ v = (v AvB),
A
подслова A. Легко проверить, что эта операция является корректно определенной на циклических
словах с двойным вхождением. На рис. 23 преобразование m 7→ m ∗ v изображается для хордовых
диаграмм (пунктирные дуги хордовых диаграмм содержат концы всех хорд, отличных от v). Для
22
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
a
c
b
d
a
b
d
c
РИС. 22. Хордовая диаграмма слова (abacdbcd)
v
v
B
A
v
v
B
A
A
B
v
v
РИС. 23. Операция ∗ на хордовых диаграммах
каждого преобразования хордовых диаграмм мы считаем, что только фиксированные фрагменты
хордовых диаграмм меняются. Части хордовых диаграмм, не содержащие хорд, участвующих в
преобразованиях, изображаются пунктирными дугами.
Пусть U — произвольный ориентированный эйлеров цикл на 4-графе H с множеством вершин V(H) = {v1 , . . . , vn }, которое будет играть роль алфавита. Двигаясь вдоль U , мы встречаем каждую вершину дважды. Последовательно записывая встречающиеся вершины, мы получим
циклическое слово m(U ) в алфавите V(H). Очевидно, что в полученном слове каждая вершина
встречается дважды, следовательно, эйлеровы циклы кодируются циклическими словами с двойным вхождением. Из определения следует, что m(U ∗ v) = m(U ) ∗ v и, если мы имеем циклическое
слово m с двойным вхождением или хордовую диаграмму, мы можем построить 4-граф, имеющий
такой эйлеров цикл U , что m(U ) = m. Мы просто «стягиваем» в одну вершину каждую пару
вершин хордовой диаграммы, помеченных одной и той же буквой, (хорду) и отождествляем новую
вершину с этой буквой.
4.2. Оснащенные 4-графы и эйлеровы циклы. Пусть H — произвольный оснащенный 4-граф,
и U — эйлеров цикл на нем. Построим оснащенное циклическое слово m(U ) с двойным вхождением (соотв., оснащенную хордовую диаграмму), соответствующее эйлерову циклу U . В каждой
вершине v графа H мы имеем следующие три возможности прохождения вдоль U через вершину
v:
1. мы переходим с полуребра на противоположное ему полуребро, см. рис. 24 а). Вершина v в
этом случае будет называться гауссовой вершиной для U , и хорда, соответствующая этой
вершине, также будет называться гауссовой;
2. мы переходим с полуребра на непротивоположное ему полуребро, причем ориентации противоположных ребер различны, см. рис. 24 б). Вершина v в этом случае будет называться
негауссовой вершиной с оснащением 0 для U , и хорда, соответствующая этой вершине,
также будет называться негауссовой хордой с оснащением 0;
3. мы переходим с полуребра на непротивоположное ему полуребро, причем ориентации противоположных ребер совпадают, см. рис. 24 в). Вершина v в этом случае будет называться
негауссовой вершиной с оснащением 1 для U , и хорда, соответствующая этой вершине,
также будет называться негауссовой хордой с оснащением 1.
Определение 4.2. Эйлеров цикл, имеющий только гауссовы вершины, называется гауссовым
циклом. Эйлеров цикл, содержащий только негауссовы вершины, называется поворачивающим
обходом, см. [77, 78, 142, 146, 189].
4. Гауссовы циклы и поворачивающие обходы
v
v
v
а)
23
б)
в)
РИС. 24. Переход через вершину
Определение 4.3. Назовем оснащенный 4-граф, имеющий гауссов цикл, уникурсальным графом.
Двигаясь вдоль эйлерова цикла U , мы встречаем каждую вершину графа H дважды. Перейдем
к построению оснащенного циклического слова m(U ) с двойным вхождением, соответствующего
эйлерову циклу U . Слова будут рассматриваться над алфавитом X = V(H) ∪ V(H)−1 ∪ V(H)G , где
множество V(H)−1 состоит из элементов вида v −1 для каждой вершины v ∈ V(H), а множество
V(H)G состоит из элементов вида v G для каждой вершины v ∈ V(H). Каждой гауссовой вершине
будут соответствовать в m(U ) две одинаковые буквы из множества V(H)G , т.е. каждому вхождению соответствующей вершины мы припишем верхний индекс G. Например, m(U ) = (Av G Bv G ),
если вершина v является гауссовой. Каждой негауссовой вершине с оснащением 0 будут соответствовать в m(U ) две одинаковые буквы из множества V(H) ∪ V(H)−1 , т.е. каждому вхождению
соответствующей вершины мы либо ничего не припишем, либо припишем оба раза верхний индекс
−1. Например, m(U ) = (AvBv) или m(U ) = (Av −1 Bv −1 ), если вершина v является негауссовой
вершиной с оснащением 0. Каждой негауссовой вершине с оснащением 1 будут соответствовать
в m(U ) две разные буквы из множества V(H) ∪ V(H)−1 , т.е. двум вхождениям соответствующей вершины мы, произвольным образом, приписываем разные верхние индексы. Например,
m(U ) = (Av −1 Bv) или m(U ) = (AvBv −1 ), если вершина v является негауссовой вершиной с
оснащением 1 (мы не делаем различия между этими двумя словами). Таким образом, мы рассматриваем не просто оснащенные циклические слова, а классы эквивалентности оснащенных
циклических слов, где эквивалентность порождается автоморфизмами алфавита, которые меняют
буквы v и v −1 местами для некоторой буквы v. Для простоты изложения мы называем эти классы
оснащенными циклическими словами.
Замечание 4.2. Построенное оснащенное слово не всегда будет являться словом с двойным
вхождением каждой буквы. Мы можем рассмотреть проекцию π : V (H) ∪ V (H)−1 ∪ V (H)G →
V (H) ∪ V (H)G , заданную правилом v ±1 7→ v и v G 7→ v G . Образ построенного оснащенного слова
при этой проекции является уже словом с двойным вхождением каждой буквы. Мы называем
оснащенное слово словом с двойным вхождением, если образ слова при проекции π является
словом с двойным вхождением.
Изображая оснащенное циклическое слово с двойным вхождением посредством оснащенной
хордовой диаграммы, мы будем использовать хорды трех типов: хорды с меткой G для гауссовых
вершин, «жирные» хорды без меток для негауссовых вершин с оснащением 0 и пунктирные хорды
для негауссовых вершин с оснащением 1.
Пример 4.3. Рассмотрим оснащенное циклическое слово с двойным вхождением m =
(ab−1 acdG e−1 dG b−1 c−1 e). Имеем: d — гауссова вершина, a, b — негауссовы вершины с оснащением 0 и c, e — негауссовы вершины с оснащением 1. Соответствующая оснащенная хордовая
диаграмма изображена на рис. 25.
Пусть V — произвольное конечное множество. Имея оснащенное циклическое слово m с двойным вхождением (оснащенную хордовую диаграмму) в алфавите V ∪V −1 ∪V G , мы можем построить
оснащенный 4-граф, имеющий такой эйлеров цикл U , что оснащенное слово m(U ) совпадает с m.
Мы сначала построим 4-граф, а затем зададим оснащение, используя тип каждой вершины.
Определим операцию оснащенная звездочка на множестве оснащенных циклических слов с
двойным вхождением. Будем обозначать эту операцию тем же самым символом ∗.
24
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
c
a
d
b
G
e
a
e
d
b
c
РИС. 25. Оснащенная хордовая диаграмма для (ab−1 acdG e−1 dG b−1 c−1 e)
v
v
)
v
v
)
РИС. 26. Операция оснащенная звездочка
Замечание 4.3. Мы использовали то же самое обозначение для «простых» циклических слов
с двойным вхождением. Далее мы будем рассматривать только оснащенные циклические слова с
двойным вхождением, и такое обозначение не приведет к противоречию.
Сначала мы определим операцию w, где w — произвольное подслово (необязательно слово
с двойным вхождением) оснащенного циклического слова с двойным вхождением. Пусть w =
l
xε11 . . . xεkk . Тогда w = xεkk . . . xε11 , где xεl l = xεl l , если εl = G, и xεl l = x−ε
l , если εl = ±1. Далее,
′
m = (aε m1 aε m2 ) — оснащенное циклическое слово с двойным вхождением. Положим m ∗ a =
(am1 am2 ), если ε = ε′ = G (рис. 26 а)); m ∗ a = (aG m1 aG m2 ), если ε = ε′ ̸= G (рис. 26
a)); m ∗ a = (am1 a−1 m2 ), если ε = −ε′ (рис. 26 б)). Таким образом, в результате применения
операции оснащенная звездочка к букве a мы получаем: если a являлась гауссовой буквой, то в
новом слове она будет негауссовой буквой с оснащением 0; если a являлась негауссовой буквой с
оснащением 0 (соотв., 1), то в новом слове она будет гауссовой буквой (соотв., негауссовой буквой
с оснащением 1).
Используя предложение 4.1, не трудно доказать
Предложение 4.2 (см. [77, 78, 146]). Любые два оснащенных циклических слова с двойным
вхождением, полученные из оснащенного 4-графа, связаны между собой последовательным
применением операции оснащенная звездочка.
4. Гауссовы циклы и поворачивающие обходы
25
Беря произвольный эйлеров цикл и применяя операцию оснащенная звездочка к гауссовым
буквам, мы получаем
Предложение 4.3. Каждый оснащенный 4-граф имеет поворачивающий обход.
Замечание 4.4. Нетрудно доказать предложение 4.3, используя и другие методы.
Очевидно, что существует много поворачивающих обходов, и не каждый оснащенный 4-граф
имеет гауссов цикл (если гауссов цикл существует, то он единствен). В следующем разделе 4.3
мы сформулируем критерий существования гауссова цикла, используя произвольный эйлеров цикл,
и покажем, как его получить при условии существования. Следующее утверждение говорит нам,
как связаны два поворачивающих обхода на оснащенном 4-графе.
Утверждение 4.1 (см. [77, 78, 146]). Любые два поворачивающих обхода получаются друг
из друга последовательностью следующих операций: оснащенная звездочка, примененная к
негауссовым буквам с оснащением 1, и (((m ∗ a) ∗ b) ∗ a), где m — оснащенное циклическое слово
с двойным вхождением, a, b — негауссовы буквы с оснащением 0, причем они чередуются в
слове m, т.е. m = (. . . a . . . b . . . a . . . b).
4.3. Существование гауссова цикла. Нам потребуются два понятия для формулирования критерия существования гауссова цикла: матрица смежности оснащенного циклического слова с
двойным вхождением (оснащенной хордовой диаграммы) и перестройка множества хорд.
Определение 4.4. Пусть D — оснащенная хордовая диаграмма, и пусть S 1 — ее окружность.
Напомним, что две хорды называются зацепленными, если концы одной хорды лежат в разных
связных компонентах множества, полученного из S 1 выбрасыванием концов другой хорды. Используя язык оснащенных циклических слов с двойным вхождением, мы называем две буквы
a, b чередующимися, если мы их встречаем последовательно (. . . aα1 . . . bβ1 . . . aα2 . . . bβ2 . . .), при
прочтении слова циклически.
Определение 4.5. Матрица смежности хордовой диаграммы D с пронумерованными n хордами — это n × n матрица A(D) = (aij ), удовлетворяющая следующим условиям
1. элемент aii равен оснащению хорды с номером i, т.е. или G, или 0, или 1;
2. aij = 1, i ̸= j, если и только если хорды с номерами i и j зацеплены;
3. aij = 0, i ̸= j, если и только если хорды с номерами i и j не зацеплены.
Замечание 4.5. Матрицы смежности рассматриваются над Z2 , если у нас на диагонали нет
букв G.
Пример 4.4. Пусть D — оснащенная хордовая диаграмма, изображенная на рис. 25. Пронумеруем все хорды из D: хорда aa имеет номер 1, хорда bb — номер 2 и т.д. Тогда
0 1 0 0 0
1 0 1 0 1
.
0
1
1
0
1
A(D) =
0 0 0 G 1
0 1 1 1 1
Пусть D — оснащенная хордовая диаграмма без гауссовых хорд. Определим перестройку вдоль
множества хорд хордовой диаграммы D следующим образом. Для каждой хорды, имеющей оснащение 0 (соотв., 1), мы рисуем параллельную (соотв., пересекающую) хорду около первоначальной
хорды и удаляем дуги окружности между соседними концами, как показано на рис. 27. Незначительным шевелением картинка в R2 преобразуется в одномерное многообразие в R3 . Это многообразие M (D) и есть результат перестройки, см. рис. 28.
Оказывается, число компонент связности многообразия M (D) может быть определено из матрицы смежности A(D) диаграммы D.
Теорема 4.1 (см. [14, 40, 175, 198, 202]). Пусть D — оснащенная хордовая диаграммы, не
содержащая гауссовых хорд. Тогда число компонент связности многообразия M (D) равно
corankZ2 A(D) + 1, где A(D) — матрица смежности диаграммы D над Z2 и коранг вычисляется
над Z2 .
26
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 27. Перестройка окружности по хордам
РИС. 28. Многообразие M (D)
e2
e1
e3 v
e4
e1
e3
e2
e3 v
e4
e1
e3 v
e4
e2
e1
e 2 e3
e 2 e3
e1 e4
e4 e1
G
e2
e4
)
)
)
РИС. 29. Структура оснащенной хордовой диаграммы
Используя теорему 4.1 мы можем сформулировать критерий существования гауссова цикла.
Пусть D — оснащенная хордовая диаграмма с матрицей смежности A(D). Построим матрицу
b
A(D),
удаляя строки и столбцы матрицы A(D), соответствующие гауссовым хордам.
Теорема 4.2 (см. [77, 78]). Пусть H — оснащенный 4-граф, и пусть U — эйлеров цикл на
b
H. Тогда H имеет гауссов цикл тогда и только тогда, когда corankZ2 (A(D)
+ E) = 0, где D
— оснащенная хордовая диаграмма, построенная для U , а E — единичная матрица.
Доказательство немедленно следует из рис. 29. Удалим все гауссовы хорды, заменим все хорды
с оснащением 0 на пересекающиеся хорды, а все хорды с оснащением 1 на параллельные хорды. В
результате мы получим путь, двигаясь вдоль которого, мы переходим с ребра e3 на e1 . Это и есть
гауссов цикл.
4.4. Гауссов цикл. Пусть H — оснащенный 4-граф, имеющий гауссов цикл, и пусть U — эйлеров цикл на H. Используя предложение 4.3, мы можем считать, что m(U ) (соотв., хордовая
диаграмма D) не имеет гауссовых вершин (соотв., гауссовых хорд), т.е. U — поворачивающий
обход.
Определение 4.6. Скажем, что две матрицы A = (aij ) и B = (bkl ) совпадают (или равны) с
точностью до диагональных элементов, если aij = bij при i ̸= j.
Основной результат этого раздела — следующая
4. Гауссовы циклы и поворачивающие обходы
v1
v1
27
v2
v2
РИС. 30. Уменьшающие операции
Теорема 4.3 (см. [74]). Матрица смежности гауссова цикла, рассматриваемая над Z2 , совпадает с матрицей (A(D) + E)−1 с точностью до диагональных элементов.
Доказательство. Пусть V(H) = {v1 , . . . , vn }. Нетрудно показать, что следующие операции, примененные к D, уменьшают число негауссовых хорд:
1. оснащенная звездочка, примененная к негауссовой хорде с оснащением 0;
2. m 7→ (((m ∗ a) ∗ b) ∗ a), где m — оснащенное циклическое слово с двойным вхождением, a, b
— негауссовы буквы (хорды) с оснащением 1 и они чередуются в m (зацеплены).
Мы назовем эти операции уменьшающими операциями. Уменьшающие операции меняют эйлеров
цикл U на 4-графе, и число негауссовых вершин в новом эйлеровом цикле меньше, чем в U , см.
рис. 26 а), рис. 30.
Пусть D — оснащенная хордовая диаграмма, и пусть A(D) — ее матрица смежности. Будем
применять уменьшающие операции. Без ограничения общности можно считать, что уменьшающие
операции применяются к хордам с наименьшими номерами в нашей нумерации. Тогда первая
уменьшающая операция на языке матриц выглядит следующим образом
0 0⊤ 1⊤
G 0⊤
1⊤
,
A1
A(D) = 0 A0 A1
A(D′ ) = 0 A0
⊤ A + (1)
1 A⊤
A
1
A
2
2
1
1
а вторая —
1 1 0⊤ 1⊤ 0⊤ 1⊤
1 1 0⊤ 0⊤ 1⊤ 1⊤
0 0 A0 A1 A2 A3
A(D) =
⊤ A
1
0
A
A
A
4
5
6
1
0 1 A⊤ A⊤ A7 A8
2
5
1 1 A⊤
A⊤
A⊤
A9
3
6
8
G 1 0⊤
0⊤
1⊤
1⊤
1 G 0⊤
1⊤
0⊤
1⊤
0
0
A
A
A
A
0
1
2
3
;
A(D′ ) =
0 1 A⊤
A4
A5 + (1) A6 + (1)
1
1 0 A⊤ A⊤ + (1)
A7
A8 + (1)
2
5
⊤
⊤
⊤
1 1 A3 A6 + (1) A8 + (1)
A9
здесь жирные 0 и 1 указывают на вектор-столбцы, полностью состоящие из 0 и 1 соответственно;
(1) — это матрица, полностью состоящая из единиц, и Ai — какие-то матрицы подходящих
размеров.
28
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Мы будем последовательно применять эти операции к хордовой диаграмме D. Наша следующая цель — показать, что после применения уменьшающих операций к оснащенной хордовой
диаграмме D, не имеющей гауссовых хорд, мы получим с точностью до диагональных элементов
оснащенную хордовую диаграмму с матрицей смежности (A(D) + E)−1 .
Чтобы получить матрицу (A(D) + E)−1 , мы будем совершать элементарные преобразования над
строками матрицы B(D) = A(D) + E с det(A(D) + E) = 1. Построим матрицу (A(D) + E|E)
cij...k матрицу, полученную из матрицы M удалением строк и
размера n × 2n. Обозначим через M
столбцов с номерами i, j, . . . , k.
Так как det B(D) = 1, то либо найдется диагональный элемент равный 1, либо найдутся два
таких номера i и j, что bii = bjj = 0, bij = bji = 1.
В первом случае без ограничения общности можно считать, что b11 = 1. Совершая элементарные
преобразования над матрицей B(D) с помощью первой строки, получаем
1
0⊤
1⊤
A1
B(D) = A(D) + E = 0 A0 + E
⊤
1
A1
A2 + E
1
0⊤
1⊤
A1
B ′ (D) = 0 A0 + E
⊤
0
A1
A2 + E + (1)
и
(B(D)|E)
(B ′ (D)|E ′ ) =
1 0⊤ 0⊤
1
0⊤
1⊤
0 E
A1
= 0 A0 + E
0 .
⊤
0
A1
A2 + E + (1) 1 0 E
После применения первой уменьшающей операции к хордовой диаграмме D хорда, соответствующая вершине v1 , становится гауссовой хордой, смежности негауссовых хорд определяются матри′ (D) , а другие смежности определяются первым столбцом матрицы E ′ .
\
цей B
1
Во втором случае без ограничения общности можем предположить, что b11 = b22 = 0, b12 =
b21 = 1. Совершая элементарные преобразования с помощью первых двух строк матрицы B(D),
мы получим
B(D) = A(D) + E =
0 1
0⊤
1⊤
0⊤
1⊤
1 0
0⊤
0⊤
1⊤
1⊤
0 0 A0 + E
A1
A2
A3
=
⊤
1
0
A
A
+
E
A
A
4
5
6
1
⊤
⊤
0 1
A2
A5
A7 + E
A8
⊤
⊤
⊤
1 1
A3
A6
A8
A9 + E
1 0
0⊤
0⊤
1⊤
1⊤
0 1
0⊤
1⊤
0⊤
1⊤
0
0
A
+
E
A
A
A
0
1
2
3
′
.
B (D) =
⊤
0 0
A1
A4 + E A5 + (1) A6 + (1)
0 0
A⊤
A⊤
A7 + E A8 + (1)
2
5 + (1)
⊤
0 0
A⊤
A⊤
A9 + E
3
6 + (1) A8 + (1)
и
(B(D)|E)
(B ′ (D)|E ′ ) =
0 1 0⊤ 0⊤ 0⊤ 0⊤
1 0
0⊤
0⊤
1⊤
1⊤
1 0 0⊤ 0⊤ 0⊤ 0⊤
0 1
0⊤
1⊤
0⊤
1⊤
0 0 E
0 0 A0 + E
A1
A2
A3
0
0
0
.
=
0 0
A⊤
A4 + E A5 + (1) A6 + (1) 0 1 0 E
0
0
1
0 0
0 E
0
A⊤
A⊤
A7 + E A8 + (1) 1 0 0
2
5 + (1)
⊤
0
0 E
0 0
A⊤
A⊤
A9 + E 1 1 0
3
6 + (1) A8 + (1)
4. Гауссовы циклы и поворачивающие обходы
29
После применения второй уменьшающей операции к хордовой диаграмме D хорды, соответствующие вершинам v1 и v2 , становятся гауссовыми хордами, смежности негауссовых хорд определяются
′ (D) , а оставшиеся смежности определяются первыми двумя столбцами матрицы E ′ .
\
матрицей B
12
Предположим, что мы совершили k уменьшающих операций. После этих преобразований матрица (B(D)|E) преобразуется в матрицу
(
)
E C F 0
′
′
(B (D)|E ) =
0 R S E
и F — это l × l-матрица, R — симметрическая матрица. Тогда новая оснащенная хордовая диаграмма содержит l гауссовых хорд, смежности негауссовых хорд определяются матрицей R, а все
оставшиеся смежности — первыми l столбцами матрицы E ′ . Так как det B ′ (D) = 1, то det R = 1,
и в матрице R существует или диагональный элемент, равный 1, или два таких номера p и q, что
rpp = rqq = 0, rpq = rqp = 1.
Рассмотрим первый случай. Без ограничения общности считаем, что r11 = 1. В этом случае мы
применим первую уменьшающую операцию. Мы получим
(
)
E C F 0
′
′
(B (D)|E ) =
=
0 R S E
E C1 C2 C3 F 0 0
0
0 1 0⊤ 1⊤ S1 1 0⊤ 0⊤
=
0 0 R1 R2 S2 0 E
0
⊤
S3 0 0 E
0 1 R2 R3
′
′
E 0 C2
C3
F1′ F2′ 0
0
0 1 0⊤
S1 1 0⊤ 0⊤
1⊤
=
S2 0 E
0 0 R1
R2
0
′
⊤
S
1
0 E
0 0 R2 R3 + (1)
(
) 3
′
′
E C F 0
=
= (B ′′ (D)|E ′′ ),
0 R′ S ′ E
где F ′ — это (l+1)×(l+1) матрица, R′ — это симметрическая матрица. Число гауссовых хорд новой
ходовой диаграммы равно l + 1, смежности негауссовых хорд определяются матрицей R′ , а все
оставшиеся смежности — первыми l + 1 столбцами матрицы E ′′ . Второй случай рассматривается
аналогично первому.
В конце мы получим матрицу
(
)
E (A(D) + E)−1
и оснащенную хордовую диаграмму только с гауссовыми хордами. Матрица смежности полученной
хордовой диаграммы с точностью до диагональных элементов равна (A(D) + E)−1 .
Мы доказали теорему для недиагональных элементов, но мы знаем, что на диагонали будут
стоять буквы G.
Замечание 4.6. Пусть H — произвольный (связный и содержащий хотя бы одну вершину)
ориентированный 4-граф, причем в каждую вершину входят и выходят ровно два полуребра (ориентации полуребер, соответствующих одному ребру, совпадают). Легко видеть, что на графе H
существует ориентированный эйлеров цикл U . Зададим оснащение на H таким образом, чтобы
U являлся поворачивающим обходом на уже оснащенном графе H, и в каждой вершине пара
противоположных полуребер состоит из входящего и исходящего из нее полуребер. Если на оснащенном ориентированном 4-графе H существует ориентированный гауссов цикл, то теорема 4.3
дает формулу для матрицы смежности гауссова цикла. Таким образом, последнее утверждение о
существование гауссова цикла является теоремой 3.4 из [87], и, следовательно, теорема 3.4 из [87]
является частным случаем теоремы 4.3.
Из предыдущей теоремы немедленно получаем
Следствие 4.1. Пусть U1 и U2 — два поворачивающих обхода, и пусть D1 и D2 — их оснащенные хордовые диаграммы такие, что det(A(Di ) + E) = 1. Тогда матрицы (A(D1 ) + E)−1 и
(A(D2 ) + E)−1 совпадают с точностью до диагональных элементов.
30
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
v4
v3
v2
v1
РИС. 31. Оснащенный 4-граф
Пример 4.5. Рассмотрим оснащенный 4-граф, состоящий из 4 вершин vi , рис. 31. Пусть U1 и
U2 — два поворачивающих обхода, заданные оснащенными циклическими словами с двойными
вхождениями
m(U1 ) = (v1 v4 v2 v1−1 v2 v3 v4 v3 ) и
соответственно. Тогда
1
1
A(m(U1 )) =
0
1
1
0
0
0
0
0
0
1
1
0
,
1
0
Мы получаем
m(U2 ) = (v1 v4 v3 v4 v2 v3 v1 v2−1 ),
0
1
A(m(U2 )) =
0
0
0
0
(A(m(U1 )) + E)−1 =
1
1
1
0
(A(m(U2 )) + E)−1 =
1
1
и
0
1
1
1
1
1
0
1
0
0
1
1
1
1
1
1
1
1
1
0
0
1
0
1
0
0
.
1
0
1
1
,
1
1
1
1
1
0
G 0 1 1
0 G 1 1
A=
1 1 G 1
1 1 1 G
— матрица смежности гауссова цикла, заданного с помощью (v1 v4 v3 v1 v2 v4 v3 v2 ).
Определение 4.7. Оснащенная хордовая диаграмма называется d-диаграммой [131], если все
ее хорды являются негауссовыми хордами с оснащением 0, и множество всех ее хорд может быть
разбито на два дизъюнктных подмножества, причем хорды из одного подмножества не зацеплены
друг с другом.
Из критерия планарности погруженной кривой, см. стр. 20, и из теории атомов немедленно
получаем
Следствие 4.2. Пусть D — оснащенная хордовая диаграмма, все хорды которой являются
негауссовыми с оснащением 0, и det(A(D) + E) = 1. Если числа λ1 , . . . , λn ∈ Z2 таковы, что
(
)
det (A(D) + E)−1 + diag(λ1 , . . . , λn ) = 1,
4. Гауссовы циклы и поворачивающие обходы
31
РИС. 32. Нереализуемые графы Буше
РИС. 33. Граф, который неоднозначно представим хордовыми диаграммами
(
)−1
имеет единицы на диагонали. Кроме того, если
то матрица (A(D)+E)−1 +diag(λ1 , . . . , λn )
(
)−1
D является d-диаграммой, то матрица (A(D) + E)−1 + diag(λ1 , . . . , λn )
является матрицей смежности d-диаграммы. Здесь через diag(λ1 , . . . , λn ) обозначена диагональная матрица с
числами λ1 , . . . , λn на диагонали.
Определение 4.8. Мы скажем, что поворачивающий обход U задает структуру источниксток (ср. с определением 3.10), если каждая пара противоположных полуребер состоит из двух
входящих в вершину или двух исходящих из нее полуребер.
Замечание 4.7. Структура источник-сток не зависит от ориентации обхода U . Если какой-либо
обход задает структуру источник-сток, то соответствующий атом ориентируем.
Геометрически первая часть следствия 4.2 означает следующее. Имея оснащенный 4-граф H и
некоторый поворачивающий обход U на нем, мы можем задать ориентацию на графе H: ориентируем обход U произвольным образом и зададим с помощью него ориентацию на H. Оказывается,
если какой-то поворачивающий обход задает на оснащенном 4-графе структуру источник-сток, то
и любой другой поворачивающий обход тоже будет задавать структуру источник-сток, т.к. соответствующий атом ориентируем. Вторая часть следствия относится к вопросу планарности. Если
у нас имеется планарный оснащенный 4-граф, т.е. вложенный в плоскость граф с сохранением
структуры противоположных ребер, то все поворачивающие обходы задают d-диаграммы.
4.5. Матрицы смежности. В разделе 7 мы обобщим понятие виртуального зацепления и построим новую теорию — теорию граф-зацеплений: мы рассматриваем не только графы пересечений хордовых диаграмм и движения на них, но и все простые графы и движения на них,
которые индуцируются движениями на графах пересечений. Граф-зацепления можно строить разными способами. Мы построим две теории граф-зацеплений: при построении первой теории мы
будем использовать гауссов цикл, а при построении второй — поворачивающий обход. Результаты данного раздела нам потребуются для доказательства равносильности двух этих подходов к
построению теории граф-зацеплений, см. раздел 7.
Хорошо известно, что существуют симметрические матрицы над Z2 , которые могут не иметь
реализацию в виде хордовых диаграмм [21], см. рис. 32 (здесь симметрическая матрица — это
матрица смежности соответствующего графа), и симметрические матрицы, которые могут быть
реализованы разными хордовыми диаграммами, см. рис. 33. При доказательстве теоремы 4.3 мы
использовали только элементарные преобразования и матрицы смежности. Оказывается, что теорема 4.3 и следствие 4.2 могут быть переформулированы для произвольных симметрических матриц,
см. также раздел 7.2.
В данном разделе все матрицы рассматриваются над полем Z2 с диагональными элементами,
равными 0 или 1. Рассмотрим следующую операцию над множеством симметрических матриц.
32
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Определение 4.9. Пусть A = (aij ) — произвольная симметрическая матрица размера n × n.
Построим новую матрицу Loc(A, k) = (e
aij ), здесь e
apq = apq + 1, p, q ̸= k, если apk = 1 и akq = 1,
иe
apq = apq иначе. Мы назовем преобразование A 7→ Loc(A, k) локальным дополнением матрицы
A в элементе akk (эта операция является аналогом операции оснащенная звездочка).
Нетрудно показать, что, если aij = 1, то матрицы
Loc(Loc(Loc(A, i), j, i) и
Loc(Loc(Loc(A, j), i, j)
совпадают с точностью до диагональных элементов с номерами i, j.
Определение 4.10. Пусть A — произвольная симметрическая матрица, для которой aii = ajj =
e где диагональные
0, aij = aji = 1. Шарнирное преобразование — это преобразование A 7→ A,
e
элементы матрицы A совпадают с диагональными элементами матрицы A, а другие элементы
e совпадают с соответствующими элементами матрицы Loc(Loc(Loc(A, i), j, i).
матрицы A
Обозначим через Sym(n, Z2 ) множество всех симметрических n × n матриц над Z2 . Рассмотрим
два отношения эквивалентности на множестве Sym(n, Z2 ). Первое отношение — это равенство
с точностью до диагональных элементов, обозначим это отношение эквивалентности через ∼D .
Второе отношение эквивалентности определяется следующим образом: будем говорить, что две
матрицы A и B получены друг из друга заменой обхода, обозначим это отношение эквивалентности через A ∼C B, если A и B получаются друг из друга последовательностью преобразований:
локальное дополнение в элементе, равным единице, и шарнирное преобразование.
Замечание 4.8. В реализуемом случае вторая эквивалентность соответствует «настоящей» замене обхода на оснащенном 4-графе.
Доказательство основного результата этой части основано на следующих четырех леммах.
Лемма 4.1 (см. [77, 78]). Если det(A + E) = 1 и B ∼C A, то det(B + E) = 1, где E —
единичная матрица.
Замечание 4.9. Если симметрические матрицы A и B реализуются в виде хордовых диаграмм,
то лемма 4.1 в этом случае означает, что после применения подходящих операций оснащенная
звездочка к поворачивающему обходу проекции узла на плоскость мы снова получим поворачивающий обход проекции узла, а не зацепления.
Обозначим через Sym+ (n, Z2 ) ⊂ Sym(n, Z2 ) подмножество множества всех симметрических
матриц, состоящее из всех матриц A, для которых det(A + E) = 1.
Следствие 4.3. Отношение ∼C также является отношением эквивалентности и на множестве Sym+ (n, Z2 ).
Рассмотрим два множества
L(n) = Sym(n, Z2 )/ ∼D
G(n) = Sym+ (n, Z2 )/ ∼C .
and
Лемма 4.2. Каждый элемент множества L(n) имеет представитель с определителем, равным 1.
Доказательство. Докажем лемму по индукции, где индукцию будем проводить по размерности n
матрицы.
База индукции. Для n = 1 утверждение леммы очевидно.
Шаг индукции. Предположим, что утверждение леммы верно для квадратных матриц размера
n − 1, и пусть A — произвольная n × n матрица. По предположению индукции мы можем считать,
что det A11 = 1, где Aij — это алгебраическое дополнение до элемента aij . Тогда либо
det A = a11 A
11
+
n
∑
a1j A
1j
= a11 +
j=2
либо
e = (a11 + 1)A11 +
det A
n
∑
j=2
n
∑
a1j A1j = 1,
j=2
1j
a1j A
= a11 + 1 +
n
∑
j=2
a1j A1j = 1,
4. Гауссовы циклы и поворачивающие обходы
33
e отличается от A только одним элементом e
где матрица A
a11 .
e — произвольные две матрицы над Z2 , для которых det B = det B
e=
Лемма 4.3. Пусть B и B
e
1, и матрицы B и B совпадают с точностью до одного диагонального элемента. Тогда
e −1 + E получаются друг из друга операцией локальное дополнение в
матрицы B −1 + E и B
элементе, равным единице.
e = (ebij ) — две n × n
Доказательство. Без ограничения общности считаем, что B = (bij ), B
e −1 ,
матрицы, ebnn = bnn + 1 = 0 и ebij = bij , i ̸= n или j ̸= n. Найдем обратные матрицы B −1 и B
e т.е. с помощью элементарных
совершая элементарные преобразования над строками матриц B и B,
e к единичному виду, а затем, применяя те же самые
преобразований мы приведем матрицы B и B
преобразования к единичным матрицам, мы получим обратные.
e = 1, имеем
Используя равенство det B = det B
e = det B + det B
bnn = 1 + det B
bnn ,
1 = det B
rankB = n,
bnn = 0,
det B
b n = n − 2;
rankB
n
bnn — матрица, полученная из матрицы B удалением n-ой строки и n-го столбца. Так как
здесь B
bnn является симметрической, без ограничения общности можем считать, что det C = 1,
матрица B
bnn удалением (n − 1)-ой строки и (n − 1)-ого столбца.
где C — матрица, полученная из B
e (первые (n − 1) строк
Совершая элементарные преобразования над строками матриц B и B
e совпадают), мы приводим матрицы B и B
e к виду
матриц B и B
E u v F 0 0
0⊤ 0 1 a⊤ 1 0 ,
B
0⊤ 1 1 b⊤ 0 1
E u v F 0 0
e
0⊤ 0 1 a⊤ 1 0 ;
B
0⊤ 1 0 b⊤ 0 1
здесь F — это (n − 2) × (n − 2)-матрица, a, b, u, v — (n − 2)-вектор-столбцы. Далее совершая
e и B, получаем
элементарные преобразования над строками матрицы B
E u v F 0 0
E u v F 0 0
e
0⊤ 0 1 a⊤ 1 0
0⊤ 1 0 b⊤ 0 1
B
⊤
⊤
0
1 0
0⊤ 0 1 a⊤ 1 0
b
0 1
E 0 0 F2 b a
E u 0 F1 b 0
0⊤ 1 0 b⊤ 0 1 ,
0⊤ 1 0 b⊤ 0 1
0⊤ 0 1 a⊤ 1 0
0⊤ 0 1 a⊤ 1 0
т.е. u = a, v = b (обратная
E u
0⊤ 0
B
0⊤ 1
E a 0 0⊤ 1 0 0⊤ 0 1 матрица к симметрической матрице является симметрической),
F
0 0
E a b v F 0 0
0⊤ 1 0 a⊤ + b⊤ 1 1
1 a⊤ 1 0
⊤
a⊤
1 0
b
0 1
0⊤ 0 1 1
F3
a+b a
F1
b 0
E 0 0 0⊤ 1 0 a⊤ + b⊤
1
1 .
a ⊤ + b⊤ 1 1
⊤
⊤
⊤
a
1
0
a
1 0
0
0 1
Нетрудно видеть, что F3 получена из F2 добавлением строки a⊤ к строке матрицы F2 , которая соответствует строке матрицы B −1 , имеющей последний элемент равный 1. Следовательно, матрица
e −1 + E с помощью операции локальное дополнение в элементе,
B −1 + E получена из матрицы B
которой соответствует элементу ebnn .
34
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
e — две произвольные матрицы над Z2 , для которых det B = det B
e=
Лемма 4.4. Пусть B и B
e совпадают с точностью до двух элементов на диагонали с
1, и пусть матрицы B и B
b i = det B
b j = 1, здесь B
b k — матрица, полученная из B
номерами i и j. Предположим, что det B
i
j
k
e −1 + E получаются друг
удалением k-ой строки и k-го столбца. Тогда матрицы B −1 + E и B
из друга одним шарнирным преобразованием.
e = (ebij ) — две
Доказательство. Без ограничения общности можем считать, что B = (bij ), B
матрицы размера n × n, eb(n−1)(n−1) = b(n−1)(n−1) + 1, ebnn = bnn + 1 и ebij = bij для (i, j) ̸=
e −1 , совершая элементарные преобразования
(n−1, n−1), (n, n). Найдем обратные матрицы B −1 и B
e
над строками матриц B и B.
e = 1, мы получаем
Используя равенство det B = det B
e = det B + det B
b n−1 + det B
bnn + det B
b (n−1)n = 1 + det B
b (n−1)n ,
1 = det B
n−1
(n−1)n
(n−1)n
b (n−1)n = 0,
det B
(n−1)n
b n−1 = rankB
b n = n − 1,
rankB
n
n−1
b
rankB
(n−1)n = n − 3,
(n−1)n
b (n−1)n получена из матрицы B
bnn удалением (n − 1)-ой строки и (n − 1)-ого столбца.
здесь матрица B
(n−1)n
b (n−1)n является симметрической, без ограничения общности можно считать,
Так как матрица B
(n−1)n
b (n−1)n удалением (n − 2)-ой строки и (n − 2)-ого
что det C = 1, где матрица C получена из B
(n−1)n
e удалением n-ой строки,
столбца. Нетрудно показать, что две матрицы, полученные из матрицы B
n-ого столбца для первой матрицы и (n − 1)-ой строки, (n − 1)-ого столбца для второй матрицы
невырождены.
e (первые (n − 2) строки
Совершая элементарные преобразования над строками матриц B и B
e
e
матриц B и B совпадают), мы приводим матрицы B и B к виду
E u v w F 0 0 0
0⊤ 0 1 1 a⊤ 1 0 0
⊤
,
B
0
1 1 l b⊤ 0 1 0
0⊤ 1 l 0 c⊤ 0 0 1
E u v w F
0⊤ 0 1 1 a⊤
⊤
0
1 0 l b⊤
0⊤ 1 l 1 c⊤
e
B
0
1
0
0
0
0
1
0
0
0
,
0
1
где F — (n − 3) × (n − 3)-матрица, a, b, c, u, v, w — (n − 3)-вектор-столбцы, и l ∈ {0, 1}. Далее
совершая элементарные преобразования над строками, имеем
E u v w F 0 0 0
0 ⊤ 0 1 1 a⊤ 1 0 0
⊤
B
0
1 1 l b⊤ 0 1 0
0 ⊤ 1 l 0 c⊤ 0 0 1
F
0
0
0
E u v w 0⊤ 1 0 0 la⊤ + lb⊤ + (1 + l)c⊤
l
l
1
+
l
⊤
0
la⊤ + b⊤ + c⊤
l
1
1
0 1 0 1
0⊤ 0 0 1 (1 + l)a⊤ + b⊤ + c⊤ 1 + l 1
здесь
B −1
(
)
E B −1 ;
F1
l(a + b + c) + c la + b + c (1 + l)a + b + c
la⊤ + lb⊤ + (1 + l)c⊤
l
l
1+l
,
=
la⊤ + b⊤ + c⊤
l
1
1
⊤
⊤
⊤
(1 + l)a + b + c
1+l
1
1
4. Гауссовы циклы и поворачивающие обходы
E u v w F
0 ⊤ 0 1 1 a⊤
⊤
0
1 0 l b⊤
0 ⊤ 1 l 1 c⊤
и
e
B
0
1
0
0
0
0
1
0
0
0
0
1
E u v w F
0
0
0
0⊤ 1 0 0 l(a⊤ + b⊤ + c⊤ ) + b⊤
l
1+l l
⊤
⊤
⊤
⊤
0
0 1 0 (1 + l)a + b + c
1+l
1
1
0⊤ 0 0 1 la⊤ + b⊤ + c⊤
l
1
1
здесь
35
(
)
e −1
E B
;
F2
l(a + b + c) + b (1 + l)a + b + c la + b + c
l(a⊤ + b⊤ + c⊤ ) + b⊤
l
1+l
l
.
=
(1 + l)a⊤ + b⊤ + c⊤
1+l
1
1
⊤
⊤
⊤
la + b + c
l
1
1
e −1
B
Исследуем более подробно матрицы F1 и F2 . Имеем 4 случая в зависимости от последних двух
элементов строк.
а) Если последние два элемента строки матрицы B −1 равны 0, то и последние два элемента
e −1 равны 0. Возможны следующие два случая: либо строки
соответствующей строки матрицы B
матриц F1 и F2 получены из F добавлением суммы двух строк la⊤ + b⊤ + c⊤ и (1 + l)a⊤ + b⊤ + c⊤
к соответствующей строке матрицы F , либо они равны соответствующей строке матрицы F . В
e −1 , последние два элемента которых
обоих случаях мы получим равенство строк матриц B −1 и B
равны 0.
б) Если последние два элемента строки матрицы B −1 равны 1, то и последние два элемента
e −1 равны 1. Возможны следующие два случая: строки матриц
соответствующей строки матрицы B
F1 и F2 получены из F добавлением строки la⊤ +b⊤ +c⊤ или добавлением строки (1+l)a⊤ +b⊤ +c⊤
к соответствующей строке матрицы F . В обоих случаях мы получим равенство строк матриц B −1
e −1 , последние два элемента которых равны 1.
иB
в) Если предпоследний элемент строки матрицы B −1 равен 0, а последний равен 1, то предe −1 равен 1, а последний — 0. Возможпоследний элемент соответствующей строки матрицы B
ны следующие два случая: строки матриц F1 и F2 получены из F добавлением суммы строк
la⊤ + lb⊤ + (1 + l)c⊤ и l(la⊤ + b⊤ + c⊤ ) для F1 и суммы строк l(a⊤ + b⊤ + c⊤ ) + b⊤ и
l((1 + l)a⊤ + b⊤ + c⊤ ) для F2 или добавлением суммы трех строк la⊤ + lb⊤ + (1 + l)c⊤ ,
(1 + l)(la⊤ + b⊤ + c⊤ ) и (1 + l)a⊤ + b⊤ + c⊤ для F1 и суммы трех строк l(a⊤ + b⊤ + c⊤ ) + b⊤ ,
(1 + l)((1 + l)a⊤ + b⊤ + c⊤ ) и la⊤ + b⊤ + c⊤ для F2 к соответствующей строке матрицы F . В обоих
e −1 равна la⊤ + b⊤ + c⊤ .
случаях сумма соответствующих друг другу строк матриц B −1 и B
−1
г) Если предпоследний элемент строки матрицы B
равен 1, а последний — 0, то предпо−1
e
следний элемент соответствующей строки матрицы B
равен 0, а последний равен 1. Возможны следующие два случая: строки матриц F1 и F2 получены из F добавлением суммы строк
la⊤ + lb⊤ + (1 + l)c⊤ и (1 + l)(la⊤ + b⊤ + c⊤ ) для F1 и суммы строк l(a⊤ + b⊤ + c⊤ ) + b⊤ и
(1 + l)((1 + l)a⊤ + b⊤ + c⊤ ) для F2 или добавлением суммы трех строк la⊤ + lb⊤ + (1 + l)c⊤ ,
l(la⊤ + b⊤ + c⊤ ) и (1 + l)a⊤ + b⊤ + c⊤ для F1 и суммы строк для l(a⊤ + b⊤ + c⊤ ) + b⊤ ,
l((1 + l)a⊤ + b⊤ + c⊤ ) и la⊤ + b⊤ + c⊤ для F2 к соответствующей строке матрицы F . В обоих
e −1 равна (1 + l)a⊤ + b⊤ + c⊤ .
случаях сумма соответствующих друг другу строк матриц B −1 и B
−1
−1
e + E получаются друг из друга шарнирным преобразоСледовательно, матрицы B + E и B
ванием.
Замечание 4.10. Если симметрическая матрица B реализуется в виде хордовой диаграммы, то
e равная B с точностью до диагональных элементов, тоже реализуется в виде хордовой
и матрица B,
диаграммы. В этом случае леммы 4.3 и 4.4 означают, что поворачивающие обходы, полученные из
гауссова обхода разными способами, связаны преобразованиями указанными в утверждении 4.1.
Теорема 4.4 ([76]).
1. Отображение υ : G(n) → L(n), заданное формулой
υ[A]C = [(A + E)−1 ]D ,
36
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
корректно определено.
2. Существует обратное отображение υ −1 : L(n) → G(n).
Доказательство. Обозначим через Eij , i ̸= j, матрицу, все диагональные элементы которой равны
1, элемент, стоящий на пересечении i-ой строки и j-го столбца, равен 1, остальные элементы равны
0.
e
1) Пусть A ∼C A.
e получаются друг из друга шарнирным преобразованием для первых двух
Если матрицы A и A
элементов, то
1 1
0⊤
1⊤
0⊤
1⊤
1 1
0⊤
0⊤
1⊤
1⊤
0 0 A0 + E
A1
A2
A3
,
B =A+E =
⊤
1
0
A
A
+
E
A
A
4
5
6
1
⊤
⊤
0 1
A2
A5
A7 + E
A8
⊤
⊤
⊤
1 1
A3
A6
A8
A9 + E
1 1
0⊤
0⊤
1⊤
1⊤
1 1
0⊤
1⊤
0⊤
1⊤
0 0 A0 + E
A1
A2
A3
e
e
=
B =A+E =
⊤
A1
A4 + E A5 + (1) A6 + (1)
0 1
1 0
A⊤
A⊤
A7 + E A8 + (1)
2
5 + (1)
⊤
1 1
A⊤
A⊤
A9 + E
3
6 + (1) A8 + (1)
= BE1k1 . . . E1kp E2(kp +1) . . . E2kq E1(kq +1) . . . E1n E2(kq +1) . . . E2n E12 E21 E12 = BM,
здесь k1 , . . . , kp — номера тех столбцов, которые имеют 1 в первой строке и 0 во второй строке,
kp + 1, . . . , kq — номера тех столбцов, которые имеют 0 в первой строке и 1 во второй строке, и
kq + 1, . . . , n — номера тех столбцов, которые имеют 1 в первых двух строках.
e −1 = M −1 B −1 . Последняя матрица получается из матрицы B −1 добавлением строк
Получаем B
e −1 и B −1 являются симметрическими, то матрица
к первым двум ее строкам. Так как матрицы B
−1
−1
e
B может отличаться от матрицы B только в четырех элементах, расположенных в первых двух
e −1 = (ebij ).
строках и столбцах. И так мы должны доказать равенство b12 = eb12 , B −1 = (bij ), B
Имеем
1
0⊤
0⊤
1⊤
1⊤
0 A0 + E
A1
A2
A3
12
⊤
=
A1
A4 + E
A5
A6
b = det 1
⊤
⊤
0
A2
A5
A7 + E
A8
⊤
⊤
⊤
1
A3
A6
A8
A9 + E
1
0⊤
0⊤
1⊤
1⊤
0 A0 + E
A1
A2
A3
⊤
A1
A4 + E A5 + (1)
A6 + (1)
= det
=
0
⊤
⊤
0
A2
A5
A7 + E
A8
⊤
⊤
⊤
0
A3
A6
A8 + (1) A9 + E + (1)
A0 + E
A1
A2
A3
A⊤
A4 + E A5 + (1)
A6 + (1)
1
,
= det
⊤
⊤
A2
A5
A7 + E
A8
⊤
⊤
⊤
A3
A6
A8 + (1) A9 + E + (1)
1
0⊤
1⊤
0⊤
1⊤
0 A0 + E
A1
A2
A3
⊤
eb12 = det 0
A1
A4 + E A5 + (1) A6 + (1)
=
⊤ + (1)
1
A⊤
A
A
+
E
A
+
(1)
7
8
2
5
⊤
⊤
⊤
1
A3
A6 + (1) A8 + (1) A9 + E
5. Четность в теории узлов
37
1
0⊤
1⊤
0⊤
1⊤
0 A0 + E
A1
A2
A3
⊤
A1
A4 + E A5 + (1)
A6 + (1)
= det
=
0
⊤
⊤
0
A2
A5
A7 + E
A8
⊤
⊤
⊤
A6
A8 + (1) A9 + E + (1)
0
A3
A0 + E
A1
A2
A3
A⊤
A4 + E A5 + (1)
A6 + (1)
1
= b12 .
= det
⊤
A⊤
A
A
+
E
A
7
8
2
5
⊤
⊤
⊤
A3
A6
A8 + (1) A9 + E + (1)
e −1 .
Мы доказали, что B −1 ∼D B
e
Если матрицы A и A получаются друг из друга операцией локальное дополнение в первом
элементе, который равен единице, то
0
0⊤
1⊤
A1
B = A + E = 0 A0 + E
⊤
1
A1
A2 + E
и
0
0⊤
1⊤
e = 0 A0 + E
= (A(G1 ) + E)E1m E1(m+1) . . . E1n ,
A1
B
⊤
1
A1
A2 + (1) + E
здесь числа m, m + 1, . . . , n соответствуют номерам строк, содержащим 1 в первой строке.
e −1 = E1n . . . E1m B −1 . Матрица B
e −1 получается из матрицы B −1 добавлением суммы
Получаем B
e −1 и B −1 являются симметристрок номерами от m до n к первой ее строке. Так как матрицы B
−1
−1
e
ческими, то матрица B отличается от матрицы B , быть может, только первым элементом на
e −1 .
диагонали. Мы доказали B −1 ∼D B
e
Если матрицы A и A получаются друг из друга последовательностью операций локальное дополнение и шарнирное преобразование, то последовательно применяя два предыдущих случая, мы
e + E)−1 .
получим (A + E)−1 ∼D (A
e и det B = det B
e = 1, то, применяя леммы 4.3 и 4.4, мы получаем B −1 + E ∼C
2) Если B ∼D B
e −1 + E. Используя лемму 4.2, мы видим, что существует некоторая матрица B с det B = 1 в
B
каждом классе [C]D . Мы можем определить обратное отображение υ −1 : L(n) → G(n), положив
υ −1 ([C]D ) = [B −1 + E]C .
Замечание 4.11. Если мы рассматриваем симметрические матрицы, реализуемые хордовыми
диаграммами, то соответствующие элементы из G(n) и L(n) — это просто оснащенные 4-графы
с точностью до мутации, см. [37, 61]. Наш изоморфизм υ устанавливает эквивалентность между
разными способами задания оснащенного 4-графа.
5.
ЧЕТНОСТЬ
В ТЕОРИИ УЗЛОВ
Пусть дана гауссова диаграмма виртуального узла. Назовем хорду четной, если количество
хорд, зацепленных с ней, четно и нечетной иначе (считается, что хорда не зацеплена сама с
собой). Такая четность называется гауссовой. Далее для хорд a, b будем писать ⟨a, b⟩ = 0 ∈ Z2 ,
если a, b не зацеплены, и ⟨a, b⟩ = 1 ∈ Z2 , если они зацеплены.
Пример 5.1. Рассмотрим гауссову диаграмму, изображенную на рис. 34 (стрелки и знаки хорд
на четность не влияют). Тогда хорды a и b являются нечетными, а хорды c, d, e — четными.
Как было замечено Гауссом, гауссова диаграмма классического узла имеет все четные хорды, [27, 28, 189].
Движения Рейдемейстера для диаграмм классических узлов естественным образом переписываются на языке гауссовых диаграмм. При этом не всякая гауссова диаграмма реализует классический узел. В частности, к таким нереализуемым диаграммам относятся диаграммы, имеющие
нечетные хорды.
Классические узлы представляют собой собственное подмножество множества виртуальных узлов [66]. Как оказывается, существует резкое упрощение виртуальных узлов — свободные узлы
38
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
d
c
a
b
e
РИС. 34. Гауссова диаграмма
(см. определение 5.2), которое получается забыванием на гауссовой диаграмме виртуального узла информации о стрелках и знаках. Свободные узлы представляют собой центральный объект
исследования настоящей части; они тесно связаны с граф-зацеплениями, изучавшимися в работах [77, 78, 206, 80]. Граф-зацеплениям будет посвящен раздел 7.
Отметим, что свободные узлы и зацепления в литературе также называются гомотопическими
классами гауссовых слов и гауссовых предложений [62, 211, 212]. Это связано с тем, что гауссовы диаграммы можно кодировать словами, см. пункт 4. Если же мы рассматриваем зацепление
с многими компонентами, то ему соответствует гауссова диаграмма на нескольких окружностях,
количество которых равно количеству компонент зацепления. Гауссовы диаграммы на нескольких окружностях, в свою очередь, кодируются гауссовыми предложениями. Тем самым, любое
утверждение о гауссовой диаграмме переписывается на языке слов и предложений.
Каждая гауссова диаграмма задает некоторый абстрактный оснащенный 4-граф, ребра которого
находятся в однозначном соответствии с дугами хордовой диаграммы, а вершины — в однозначном соответствии с хордами. Дуги, инцидентные одному и тому же концу хорды, соответствуют
(формально) противоположным (полу)ребрам графа. Скажем, что гауссова диаграмма нечетна,
если все ее хорды нечетны. Скажем, что гауссова диаграмма несократима, если для любых двух
различных хорд a, b этой диаграммы найдется такая хорда c этой диаграммы, что ⟨a, c⟩ ̸= ⟨b, c⟩.
Те же термины (нечетность, несократимость) мы будем применять и к оснащенному 4-графу, соответствующему гауссовой диаграмме.
Можно легко убедиться, что к нечетной несократимой диаграмме нельзя применить движения
Рейдемейстера, уменьшающие количество перекрестков (первое и второе), а также третье движение Рейдемейстера, т.е. за «один шаг» эту диаграмму можно только усложнить.
Оказывается, имеет место
Теорема 5.1. Нечетная несократимая диаграмма D минимальна, т.е. любая диаграмма D′ ,
задающая тот же свободный узел, что и D, имеет большее количество перекрестков, чем D.
Эта теорема приводит к отрицательному ответу на гипотезу Тураева [212], в которой предполагалось, что все свободные узлы эквивалентны тривиальному. Первое доказательство теоремы 5.1
и развитие теории четности появились в серии препринтов [160, 161, 162].
Параллельно и независимо (несколько позже) примеры нетривиальных свободных узлов были
получены Э. Гибсоном в работе [62].
Более того, благодаря этой теореме можно построить бесконечное число нечетных несократимых
свободных узлов, минимальные диаграммы которых различны, тем самым доказав, что число
классов эквивалентности свободных узлов бесконечно.
Далее мы докажем эту теорему в гораздо более сильной формулировке.
Отметим, что свойства четности были далее использованы для изучения кобордизмов свободных зацеплений, см. [148] и пункт 6. При этом соображения четности позволили доказать
существование некобордантных нулю свободных узлов как с комбинаторной точки зрения [79],
так и с топологической [163]. В работе [163] использовалось перенесение понятия четности с перекрестков на узлах на линии пересечений двумерных поверхностей. Обзор по теории четностей
см. также в [164]. Также стоит отметить, что для случая классических узлов существует только
тривиальная четность (т.е. правило, которое удовлетворяет аксиомам четности, см. пункт 5.1).
5. Четность в теории узлов
39
Структура настоящего раздела такова. Сначала мы определим свободные узлы и выявим естественный набор свойств четных и нечетных хорд и опишем их поведение при движениях Рейдемейстера. Этот набор условий можно переформулировать как аксиоматику четности, т.е. набор
требований, которым должна удовлетворять некоторая абстрактная четность в теории узлов, также можно переформулировать определение четности в терминах гомологий (эта конструкция нам
понадобится в следующем разделе). Мы приведем другие примеры четностей, удовлетворяющие
этим аксиомам (отличные от четности, происходящей из гауссовых диаграмм). Далее мы покажем, что в случае свободных узлов существует единственная нетривиальная четность — гауссова
четность.
В пункте 5.4 мы построим функториальное отображение f : для каждой теории узлов, обладающей четностью, мы построим корректно определенное отображение на множестве классов
эквивалентности узлов, определяемое посредством «забывания» нечетных перекрестков. С помощью отображения f мы построим проекционное отображение, переводящее все виртуальные узлы
в узлы с ориентируемыми атомами и оставляющее на месте узлы с ориентируемыми атомами.
Некоторые инварианты виртуальных узлов непосредственно определяются для виртуальных узлов
с ориентируемыми атомами, но не просто определяются для всех виртуальных узлов. К таким
инвариантам относятся гомологии Хованова, сигнатура виртуального узла через матрицу Гёрица.
Благодаря проекционному отображению можно продолжать инварианты узлов с ориентируемыми
атомами на все виртуальные узлы.
В пункте 5.5 мы построим инварианты [·] и {·}, которые позволяют, в частности, доказывать
теорему 5.1 (в более сильной формулировке).
Это позволяет доказать необратимость свободных зацеплений.
Пункт 5.6 посвящен описанию скобки Голдмана [64] и коскобки Тураева [215], впервые возникших в связи с изучением классов гомотопии наборов кривых на поверхностях и естественным
образом переносящихся на упрощение гомотопических классов кривых — свободные узлы и зацепления. С использованием результатов пункта 5.5 о необратимости свободных зацеплений и
коскобки Тураева мы доказываем необратимость свободных узлов.
В пункте 5.7 мы используем четность и свободные узлы для усиления скобки Кауфмана виртуальных узлов.
5.1. Свободные узлы и четная аксиоматика. Пусть дана (неориентированная) хордовая диаграмма D. Тогда ей можно поставить в соответствие подлежащий оснащенный 4-граф H(D) с
единственной уникурсальной компонентой (мы рассматриваем гауссов обход). Хордовой диаграмме с пустым множеством хорд соответствует G0 . В противном случае ребра графа находятся в
однозначном соответствии с дугами хордовой диаграммы, а вершины — в однозначном соответствии с хордами. Дуги, инцидентные одному и тому же концу хорды, соответствуют (формально)
противоположным (полу)ребрам.
Далее, для оснащенного 4-графа G с одной уникурсальной компонентой мы определим спаривание вершин v1 , v2 (над Z2 ): ⟨v1 , v2 ⟩ = ⟨a(v1 ), a(v2 )⟩, где a(vi ) — хорды, соответствующие вершинам
vi .
Оснащенный 4-граф — очень резкое упрощение понятия диаграммы узла (зацепления): в классических перекрестках мы не указываем структуру проход-переход, кроме того, мы не обращаем
внимания на знак перекрестка (или, что эквивалентно, мы забываем про структуру проход-переход
и циклический порядок полуребер, а помним лишь об отношении противоположности полуребер).
Нашей целью является рассмотрение классов эквивалентности оснащенных 4-графов по движениям, соответствующим движениям Рейдемейстера.
Каждое из этих движений состоит в преобразовании одного фрагмента оснащенного 4-графа.
Определение 5.1. Первое движение Рейдемейстера состоит в добавлении/удалении петли, см.
рис. 35.
Второе движение Рейдемейстера состоит в удалении/добавлении двуугольника, образованного парой ребер, которые являются соседними (не противоположными) в каждой из двух вершин,
см. рис. 36.
Третье движение Рейдемейстера изображено на рис. 37.
40
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 35. Первое движение Рейдемейстера и его версия на языке хордовых диаграмм
РИС. 36. Второе движение Рейдемейстера и его версия на языке хордовых диаграмм
РИС. 37. Третье движение Рейдемейстера и его версия на языке хордовых диаграмм
5. Четность в теории узлов
41
РИС. 38. Плоский узел Кишино
Определение 5.2. Свободным зацеплением назовем класс эквивалентности оснащенных 4графов по движениям Рейдемейстера.
Очевидно, что количество компонент оснащенного 4-графа не меняется при применении движений Рейдемейстера, поэтому имеет смысл говорить о количестве компонент оснащенного зацепления.
Свободным узлом мы называем свободное зацепление с одной уникурсальной компонентой.
Свободные узлы можно трактовать как классы эквивалентности гауссовых диаграмм по соответствующим преобразованиям.
Тривиальным свободным узлом (соотв., тривиальным зацеплением из n компонент) назовем
свободный узел (соотв., свободное зацепление), задаваемое графом G0 (соответственно, графом,
состоящим из n несвязных копий графа G0 ).
Аналогично определяются длинные свободные узлы: единственную уникурсальную компоненту
нужно разорвать и вытянуть концы на «бесконечность». Движения Рейдемейстера можно применять лишь к «конечным областям». Более формально: у 4-графа с единственной уникурсальной
компонентой можно пометить одно из ребер (скажем, вершиной, расположенной в середине этого
ребра) и при определении эквивалентности разрешать только те движения Рейдемейстера, которые
происходят в областях, не содержащих новую вершину. На хордовых диаграммах это соответствует метке, расположенной на одной из дуг, и запрещаются движения на хордовых диаграммах, при
которых конец хорды проходит через метку.
Естествен вопрос: что представляют из себя свободные узлы? Если рассмотреть планарный
оснащенный 4-граф (происходящий из классического узла), то этот планарный граф естественным
образом сводится к тривиальному оснащенному графу. Можно легко показать,что оснащенный
4-граф с одной уникурсальной компонентой, вложимый в тор (с сохранением отношения противоположности), также своди́м к тривиальному графу G0 (без вершин).
Свободные узлы тесно связаны с плоскими виртуальными узлами. Последние представляют
собой классы эквивалентности (самопересекающихся) кривых в ориентируемых двумерных поверхностях с точностью до гомотопии и стабилизации.
Тем не менее, эквивалентность свободных узлов еще более грубая, чем эквивалентность плоских виртуальных узлов: свободные узлы не предполагают наличия какой-либо поверхности. Каждый раз для применения движения Рейдемейстера мы можем вложить соответствующий 4-граф в
некоторую поверхность (с сохранением оснащения), применить это движение и снова забыть про
поверхность.
Пример 5.2. Рассмотрим плоский узел Кишино, изображенный на рис. 38. Известно, что он не
тривиален как плоский виртуальный узел.
Тем не менее, у соответствующего оснащенного 4-графа, рассмотренного вне поверхности, есть
двуугольник, образованный соседними ребрами; тем самым, свободный узел, задаваемый плоским
узлом Кишино, тривиален.
Точное утверждение, связывающее виртуальные узлы и свободные узлы, таково:
Лемма 5.1. Свободный узел — это класс эквивалентности виртуальных узлов по двум
преобразованиям: заменам прохода на переход и виртуализациям.
42
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Можно считать, что виртуализация — это замена способа изображения оснащенного графа на
плоскости, при которой циклический порядок полуребер меняется, а соотношение противоположности остается неизменным.
В отличие от свободных узлов виртуальные узлы имеют циклический порядок ребер в вершине:
мы не только можем сказать, какие полуребра являются локально противоположными, но и сказать, в каком порядке они появляются при обходе вокруг вершины против часовой стрелки. Кроме
того, у виртуальных узлов имеется естественная структура проходов и переходов в вершинах.
Естественная отображение «забывания» структуры перекрестков переводит множество виртуальных узлов (зацеплений) на множество свободных узлов (зацеплений). Тем самым, все инварианты свободных узлов задают некоторые инварианты виртуальных узлов.
Заметим, что в случае свободных зацеплений легко построить пример нетривиального свободного зацепления, т.е. такого зацепления, которое нельзя свести к оснащенному 4-графу без
вершин.
Действительно, рассмотрим оснащенный 4-граф G2 с одной вершиной v и двумя ребрами a, b,
каждое из которых соединяет вершину v с собой, при этом в вершине v ребро a противоположно
ребру a, а ребро b противоположно ребру b. Это свободное зацепление не эквивалентно тривиальному свободному зацеплению в связи с нетривиальностью следующего простого инварианта
двухкомпонентных свободных зацеплений.
Легко заметить, что четность количества вершин, в которых сходятся обе компоненты зацепления, инвариантна при движениях Рейдемейстера. Так как для зацепления G2 количество таких
вершин нечетно, свободное зацепление G2 нетривиально.
Далее под узлом (в широком смысле) мы будем понимать класс K диаграмм K, эквивалентность на которых задается движениями, т.е. локальными преобразованиями из некоторого списка.
В каждом конкретном случае мы будем оговаривать, какой список движений имеется в виду: как
правило, такие преобразования будут отвечать изотопиям узлов в некотором трехмерном многообразии или гомотопиям кривых на некоторой двумерной поверхности.
Каждая из диаграмм представляет собой некоторый выделенный класс графов (быть может, с
дополнительной структурой в вершинах), у которых некоторые четырехвалентные вершины оснащены. Эквивалентность задается движениями Рейдемейстера, описанными выше, применительно
к оснащенным четырехвалентным вершинам. В некоторых случаях (например, в теории классических узлов) на движения накладываются дополнительные ограничения (например, связанные со
структурой проход-переход в вершинах).
Примерами таких теорий являются теория классических и виртуальных узлов, а также кос и
танглов (классических или виртуальных).
Пусть дано правило, сопоставляющее каждой вершине каждой диаграммы K из класса K число
0 (в этом случае вершину назовем четной) или 1 (в этом случае вершину назовем нечетной). В
дальнейшем четность перекрестка v мы будем обозначать через p(v) и писать p(v) = 0 в случае,
если перекресток v четен и p(v) = 1, если перекресток v нечетен.
Определение 5.3. Пусть K1 и K2 — диаграммы узла из K, получаемые друг из друга одним
движением Рейдемейстера, причем K2 имеет не больше перекрестков, чем K1 . Скажем, что это
правило удовлетворяет четной аксиоматике, если выполнены следующие условия:
1. если K2 получается из K1 первым движением Рейдемейстера, то участвующий в движении
Рейдемейстера перекресток диаграммы K1 является четным;
2. если K2 получается из K1 вторым движением Рейдемейстера, то оба перекрестка, участвующие в движении Рейдемейстера, имеют одинаковую четность;
3. если K2 получается из K1 третьим движением Рейдемейстера, то имеется естественное соответствие между тройкой перекрестков на диаграмме K1 и тройкой перекрестков на диаграмме
K2 , участвующих в движениях Рейдемейстера ((a, a′ ), (b, b′ ), (c, c′ )), см. рис. 39.
Требуется, чтобы
a) четность соответствующих перекрестков совпадала,
б) из перекрестков a, b, c количество нечетных перекрестков было четным (т.е. 0 или 2).
4. При каждом движении Рейдемейстера K1 7→ K2 имеется взаимно однозначное соответствие
между перекрестками диаграммы K1 , не принимающими участие в движении Рейдемейстера,
5. Четность в теории узлов
43
c
b
a’
a
c’
b’
РИС. 39. Соответствие перекрестков при третьем движении Рейдемейстера
и перекрестками диаграммы K2 , не принимающими участие в движении Рейдемейстера.
Требуется, чтобы соответствующие перекрестки имели одинаковую четность.
Замечание 5.1. Естественно, правило определения четности для изоморфных графов должно
быть одинаковым. Так, например, если оснащенный 4-граф имеет симметрию (т.е. изоморфизм,
сохраняющий оснащение), то перекрестки, получающиеся друг из друга под действием этой симметрии, имеют одинаковую четность.
Замечание 5.2. В случае виртуальных узлов словом «перекресток» мы будем называть лишь
классические перекрестки, если не оговорено противное. Мы будем игнорировать движение объезда как не меняющее взаимного расположения (классических) перекрестков.
Таким образом, можно считать, что виртуальный узел — это класс эквивалентности диаграмм,
на которых указаны классические перекрестки и правила их соединения, по классическим движениям Рейдемейстера.
5.1.1. Ослабленная четная аксиоматика.
Определение 5.4. Скажем, что некоторая теория узлов K удовлетворяет ослабленной четной
аксиоматике, если в этой теории узлов при движениях Рейдемейстера выполняются аксиомы 2,
3 а), 4, а вместо аксиомы 3 б) выполняется ее ослабленная версия:
3 б’) из трех перекрестков a, b, c, участвующих в движении Рейдемейстера, количество нечетных перекрестков не равно единице.
Замечание 5.3. Ослабленная четная аксиоматика была введена в диссертации Э. Гибсона [63],
до сих пор не опубликованной. Гибсон также сообщил, что ему были известны некоторые соображения, связанные с отображением f , «убивающим нечетные перекрестки», см. далее.
5.1.2. Теория виртуальных узлов. Рассматриваются виртуальные узлы, т.е. виртуальные зацепления с одной компонентой.
Иной способ определения гауссовой четности состоит в следующем. Рассмотрим виртуальную
диаграмму K и ее классический перекресток v. Зададим произвольную ориентацию диаграммы K.
Диаграмму K в перекрестке v (для определенности будем считать, что он имеет вид
) можно
развести двумя способами: способом, согласованным с ориентацией
→
и способом, не
согласованным с ориентацией
→
. Легко видеть (см. рис. 40), что первый способ приводит
к зацеплению из двух компонент, а второй случай — к узлу (виртуальному зацеплению из одной
компоненты).
Заметим, что количество компонент, получаемое после разведения диаграммы K в перекрестке
v тем или иным способом, не зависит от ориентации диаграммы K.
Рассмотрим диаграмму, полученную из диаграммы K разведением, согласованным с ориентацией (т.е. дающим двухкомпонентное зацепление). Обозначим полученное зацепление через L1 ∪ L2 .
Рассмотрим те классические перекрестки диаграммы K, в которых компонента L1 пересекается с
компонентой L2 .
Если число таких перекрестков четно, то объявим перекресток v четным; в противном случае
объявим перекресток v нечетным.
Очевидно, что такое определение четности совпадает с определением четности посредством
гауссовой диаграммы, приведенным выше.
Действительно, разведение в перекрестке v, согласованное с ориентацией, можно трактовать
как перестройку гауссовой диаграммы по хорде. После этого все перекрестки, образуемые в
44
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 40. Разведения перекрестка
зацеплении L = L1 ∪ L2 обеими компонентами L1 и L2 , соответствуют хордам на разведенной
гауссовой диаграмме из двух окружностей, которые соединяют одну окружность с другой. На
исходной хордовой диаграмме, соответствующей узлу K, такие хорды — это в точности хорды,
зацепленные с хордой, соответствующей перекрестку v.
Замечание 5.4. Отметим, что свойство хордовой диаграммы «все хорды являются четными»
отвечает тем виртуальным диаграммам, которым соответствуют ориентируемые атомы, см. теорему 5.6.
5.1.3. Двухкомпонентные классические и виртуальные зацепления. Здесь «теорией узлов» мы
назовем теорию двухкомпонентных виртуальных зацеплений.
Четность определяется следующим образом. Для диаграммы зацепления L = L1 ∪ L2 назовем
четным классический перекресток, образованный одной компонентой (L1 или L2 ), а нечетным —
перекресток, лежащий на пересечении проекций двух компонент L1 и L2 .
Непосредственно проверяется
Утверждение 5.1. Описанная выше четность удовлетворяет аксиомам 1, 2, 3 а), 3 б), 4.
5.1.4. Узлы в полнотории, кривые на двумерных поверхностях. Рассмотрим класс K узлов в
полнотории B, представленном в виде утолщенного кольца S 1 ×I 1 ×I 1 . Узлы задаются посредством
своих проекций на S 1 × I 1 , которые получаются «забыванием» последнего сомножителя I 1 . При
этом ограничимся лишь рассмотрением тех узлов, чей класс гомологий в H1 (S 1 × I 1 × I 1 , Z2 ) = Z2
равен нулю.
На этом множестве K узлов (к которому относятся, в частности, все классические узлы, лежащие внутри некоторого шара D3 ⊂ B) определим четность перекрестков следующим образом.
Пусть K — диаграмма, X — ее перекресток. Разведем диаграмму K в перекрестке X способом,
согласованным с ориентацией (см. выше). Получим зацепление L. Очевидно следующее равенство
в классах гомологий H1 (S 1 × I 1 × I 1 , Z2 ) = Z2 : [K] = [L] = [L1 ∪ L2 ] = [L1 + L2 ]. Таким образом,
учитывая, что [K] = 0, имеем: [L1 ] = [L2 ] ∈ Z2 .
Если [L1 ] = [L2 ] = 1 ∈ Z2 , то назовем перекресток X нечетным, в противном случае назовем
перекресток четным.
Непосредственно проверяется
Утверждение 5.2. Описанные выше четности удовлетворяют аксиомам 1, 2, 3 а), 3 б), 4.
Замечание 5.5. Как частный случай теории, описанной выше, можно рассмотреть теорию замкнутых кос из четного числа нитей, рассматриваемых с точностью до изотопий кос и сопряжений.
Каждая коса естественным образом представима в виде тангла, т.е. диаграммы внутри I 1 × I 1 ,
а замкнутая коса — в виде диаграммы в S 1 × I 1 .
Метод, использующий Z2 –гомологии, может быть использован и в более общей ситуации.
Известно, что виртуальные узлы представляют собой узлы в утолщенных поверхностях Sg × I,
рассматриваемых с точностью до изотопий и стабилизаций.
Забудем про стабилизацию и рассмотрим два класса объектов: кривые в Sg , рассматриваемые с
точностью до гомотопии, и узлы в Sg × I, рассматриваемые с точностью до изотопии.
5. Четность в теории узлов
v
Γ
Γv,1
45
Γv,2
РИС. 41. Графы-разведения Γv,1 и Γv,2
И в том, и в другом случае объекты кодируются диаграммами общего положения, которые
представляют собой оснащенные 4-графы на Sg (в случае узлов — еще и со структурами проход–
переход и циклический порядок полуребер в каждой вершине). Отношения эквивалентности задаются посредством движений Рейдемейстера.
Фиксируем некоторый класс когомологий α из H 1 (Sg , Z2 ) = H 1 (Sg × I, Z2 ) и будем рассматривать только такие узлы (кривые) γ, для которых α(γ) = 0.
Тогда для такого множества узлов (кривых) K и для их диаграмм на Sg можно определить четность перекрестка посредством разведения перекрестка способом, согласованным с ориентацией и
взятием класса α на одной из «половинок» L1 или L2 , получающихся после такого разведения.
Легко проверяется, что эта четность удовлетворяет аксиомам 1, 2, 3 а), 3 б), 4.
5.2. Четность и гомологии. В настоящем разделе мы переформулируем общее определение четности в терминах гомологий, ср. [164]. Эта переформулировка будет нам полезна для понимания
способов определения четности для двойных линий некоторого кобордизма, см. пункт 6.5.
Рассмотрим оснащенный 4-граф Γ с одной уникурсальной компонентой. Группа гомологий
H1 (Γ, Z2 ) порождена «половинками», соответствующими вершинам графа: для каждой вершины
v мы имеем две «половинки» графа, Γv,1 и Γv,2 , получаемые из Γ разведением этой вершины,
см. рис. 41. Если на множестве всех оснащенных 4-графов (возможно, снабженных некоторыми
дополнительными структурами в вершинах) определена четность, то мы можем сказать, что на
каждом из графов естественным образом определен следующий когомологический класс h (над
Z2 ): для каждой из двух половинок Γv,1 , Γv,2 мы полагаем h(Γv,1 ) = h(Γv,2 ) = p(v), где p(v) обозначает четность вершины v. Принимая во внимание то, что каждые две половинки в сумме дают
цикл, соответствующий всему графу, мы получаем корректно определенный «характеристический»
когомологический класс h из H 1 (Γ, Z2 ), равный нулю на цикле, задаваемом всем графом Γ.
Заметим следующее. Каждому циклу c ∈ H1 (Γ, Z2 ), рассмотренному как подграф графа Γ,
можно сопоставить набор тех вершин графа Γ, которым c инцидентен ровно по двум ребрам,
причем эти два ребра не являются противоположными. Обозначим множество всех таких вершин
через d(c).
Покажем по индукции, где индукцию∑
будем проводить по количеству вершин в множестве d(c),
что c равен с точностью до Γ сумме
Γvi ,1 , где vi пробегают все множество d(c). Если d(c)
i
состоит из одной вершины, то утверждение очевидно. Пусть утверждение верно для всех циклов
c′ , множества d(c′ ) которых содержат менее n вершин. Пусть c — произвольный цикл, и мощность
множества d(c) равна n. Выберем произвольную вершину v ∈ d(c) и рассмотрим цикл c′ , который
получается из цикла c сменой прохода через вершину v — вершина v проходится трансверсально,
т.е. мы переходим с полуребра на противоположное ему полуребро. Тогда мощность множества
d(c′ ) равна n − 1, и c получается из c′ прибавлением половинки, соответствующей вершине v.
Отсюда получаем справедливость утверждения.
Собирая воедино свойства этого когомологического класса h и вспоминая аксиоматику четности,
мы видим, что
1. Для каждого оснащенного 4-графа Γ мы имеем h(Γ) = 0.
2. Если оснащенный 4-граф Γ′ получается из оснащенного 4-графа Γ применением первого
движения Рейдемейстера, состоящего в добавлении петли, то всякому базису {αi } группы
H1 (Γ, Z2 ) естественным образом соответствует базис группы H1 (Γ, Z2 ), состоящий из одного
элемента β, соответствующего петле, и набора элементов αi′ , находящихся в естественном
соответствии с элементами αi .
46
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
αi
Γ
αi’
δ
Γ ’’
γ
Γ’
РИС. 42. Когомологические условия в случае движений Рейдемейстера
В этом случае h(β) = 0 и ∀i : h(αi ) = h(αi′ ).
3. Пусть теперь граф Γ′ получается из графа Γ применением второго увеличивающего движения Рейдемейстера. Тогда любому базису {αi } группы H1 (Γ, Z2 ) естественным образом
соответствует базис группы H1 (Γ′ , Z2 ), состоящий из одного «двуугольника» γ, элементов
αi′ , находящихся во взаимно однозначном соответствии с элементами αi (это взаимно однозначное соответствие устанавливается посредством сглаживания), и еще одного элемента δ,
см. рис. 42, левая часть. Двуугольник равен в H1 (Γ, Z2 ) сумме двух половинок одинаковой
четности.
Тогда имеют место следующие равенства: h(αi ) = h(αi′ ), h(γ) = 0.
4. Пусть оснащенный 4-граф Γ′ получается из оснащенного 4-графа Γ посредством третьего
движения Рейдемейстера. Тогда существует граф Γ′′ с единственной вершиной валентности
шесть и остальными вершинами валентности четыре, получающийся из каждого из графов
Γ и Γ′ посредством стягивания «малого» треугольника в точку. Это порождает естественные
отображения i : H1 (Γ, Z2 ) → H1 (Γ′′ , Z2 ) и i′ : H1 (Γ′ , Z2 ) → H1 (Γ′′ , Z2 ), см. рис. 42, правая
часть.
Тогда имеет место следующее: коцикл h равен нулю на малых треугольниках в графах
Γ и Γ′ , кроме того, если для некоторых циклов a ∈ H1 (Γ, Z2 ), a′ ∈ H1 (Γ′ , Z2 ) имеет место
i(a) = i′ (a′ ), то h(a) = h(a′ ).
Равенство нулю коцикла на малых треугольниках следует из того, что каждый малый
треугольник представляет в H1 (Γ, Z2 ) элемент, равный (с точностью до прибавления самого
графа Γ) сумме трех половинок, из которых число нечетных равно нулю или двум.
Таким образом, каждая четность для свободных узлов порождает некоторый «характеристический» класс Z2 -когомологий на множестве всех оснащенных 4-графов с одной уникурсальной
компонентной, и этот класс правильно ведет себя при движениях Рейдемейстера.
Обратное утверждение также верно.
Теорема 5.2. Предположим, что задано правило, сопоставляющее каждому оснащенному
4-графу Z2 -когомологический класс, при этом этот класс является «характеристическим»
в том смысле, что он удовлетворяет условиям 1 – 4, описанным выше. Тогда этот класс
происходит из некоторой четности.
Действительно, достаточно определить нашу четность для каждой вершины как значения класса на соответствующей половинке. Независимость от выбора одной из двух половинок вытекает
из условия равенства нулю когомологического класса на всем графе. Далее непосредственно проверяются аксиомы четности: они явно следуют из условий 1)–4).
Эта точка зрения позволяет искать четности для классов узлов, лежащих в Z2 -гомологически
нетривиальных многообразиях. Подробнее см. [119].
5.3. Классификация четностей для свободных узлов. В данном пункте мы покажем, что
справедлива следующая
5. Четность в теории узлов
47
a1
a8
a7
a6
a7
a1
a2
a2
a8
a 3 a5
a4
a6 a 3 a 4
a5
РИС. 43. Пятиугольники
РИС. 44. Многоугольник в случае диаграмм узлов
Теорема 5.3. Для свободных узлов нет никакой нетривиальной четности, кроме гауссовой
четности.
Доказательство этой теоремы основано на леммах 5.2, 5.3, 5.4.
Мы будем задавать свободные узлы в виде гауссовых диаграмм с множеством пронумерованных
хорд {a1 , . . . , an }.
Определение 5.5. Будем говорить, что набор хорд с номерами i1 , . . . , ik хордовой диаграммы
образует многоугольник (в данном случае k-угольник), если циклическое слово с двойным вхождением, соответствующее данной хордовой диаграмме, содержит следующие последовательности
различных букв b2p−1 b2p , где b2p−1 , b2p ∈ {aiσ(p) , aiσ(p−1) }, p = 1, . . . , k, для некоторой перестановки
σ ∈ Sk .
Пары (b2p−1 , b2p ) букв b2p−1 , b2p из определения многоугольника назовем сторонами многоугольника.
Пример 5.3. Рассмотрим хордовую диаграмму, изображенную на рис. 43. Тогда хорды
a2 , a4 , a5 , a6 , a8 образуют выпуклый пятиугольник (слева) и невыпуклый пятиугольник (справа).
На рис. 44 изображен многоугольник в случае диаграмм узлов. Диаграмма узла не пересекает
внутренность многоугольника.
Лемма 5.2. Сумма четностей хорд многоугольника гауссовой диаграммы в любой четности
сравнима с нулем по модулю два.
Доказательство. Докажем утверждение леммы по индукции. Индукцию будем проводить по количеству сторон многоугольника. Пусть дана произвольная четность P.
База индукции. Справедливость утверждения для петли, двуугольника и треугольника вытекает из определения 5.3.
Шаг индукции. Предположим, что утверждение верно для (k − 1)-угольника. Рассмотрим произвольный k-угольник ai1 ai2 . . . aik .
Применим к хордовой диаграмме второе движение Рейдемейстера, добавив две хорды b и c, см.
рис. 45 (на рис. 45 изображены три возможности применения второго движения Рейдемейстера в
зависимости от расположения концов хорд ai1 , ai2 , ai3 , aik ).
48
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
ai
ai
3
ai2
a ik
3
2
b
c
ai1
a ik
ai1
ai2
ai
3
ai
2
3
c
a ik
ai2
a ik
ai1
ai
b ai2
ai1
ai
3
3
2
a ik
ai1
ai2
a ik
c
ai2
b ai1
РИС. 45. Второе движение Рейдемейстера
В результате мы получим (k − 1)-угольник c ai3 ai4 . . . aik и треугольник b ai1 ai2 . По предположению индукции имеем
p(c) +
k
∑
p(aij ) ≡ 0
p(b) + p(ai1 ) + p(ai2 ) ≡ 0 (mod 2),
(mod 2),
p(b) = p(c),
j=3
где p(a) четность хорды a в четности P. Следовательно,
k
∑
p(aij ) ≡ 0
(mod 2).
j=1
Замечание 5.6. Если мы работаем с диаграммами узлов, то соответствующие картинки для
леммы 5.2 выглядят как показано на рис. 46.
Перейдем от теории свободных узлов к теориям классических и виртуальных узлов. Поскольку
двуугольники и треугольники, участвующие в движениях Рейдемейстера, затягиваются дисками,
мы получаем
Следствие 5.1. Для любой четности и плоской (виртуальной) диаграммы узла сумма четностей перекрестков, образующих многоугольник, который затягивается диском на подлежащей поверхности, сравнима с нулем по модулю два.
Используя виртуализацию, мы можем любой многоугольник свести к многоугольнику, который
затягивается диском на подлежащей поверхности. В результате мы получим (см. также доказательство теоремы 5.4)
5. Четность в теории узлов
ai
49
ai
3
3
2
c
ai2
ai1
a ik
a ik
b ai
1
ai2
РИС. 46. Случай плоских диаграмм узлов
a1
a
a2
a2
a
a1
РИС. 47. Четная в гауссовой четности хорда
Следствие 5.2. Если вместо теории свободных узлов мы рассмотрим теорию псевдоузлов,
то лемма 5.2 остается справедливой и в этой теории, т.е. наличие числа закрученности
перекрестка не дает ничего нового.
Лемма 5.3. Для свободного узла (псевдоузла) любая хорда, четная в гауссовой четности,
является четной в любой другой четности.
Доказательство. Пусть дана четность P, и пусть a — четная в гауссовой четности хорда. Рассмотрим одну из половинок окружности хордовой диаграммы, на которые хорда делит эту окружность. В силу четности хорды a на этой половинке находится четное число концов хорд. Применим
индукцию по количеству этих концов.
База индукции: Если количество концов равно нулю, то хорда a четная в четности P по
свойству четности, связанному с первым движением.
Шаг индукции: Предположим, что любая четная в гауссовой четности хорда, на полуокружности которой лежит меньше n = 2k концов хорд, четна относительно P, и что на полуокружности
хорды a лежит ровно n концов.
Ориентируем хордовую диаграмму против часовой стрелки. Пусть a1 , a2 — первые два конца
хорд на полуокружности.
Рассмотрим два случая.
Пусть концы a1 , a2 отвечают разным хордам, см. рис. 47. Добавим вторым движением пару
хорд b, b′ так, чтобы полуокружность, соответствующая хорде b′ , содержала то же множество
концов хорд, что и выбранная полуокружность для a, за исключением концов a1 , a2 , см. рис. 48
(сверху). Покажем, что четность p(a) в четности P хорды a совпадает с четностью хорд b и b′
(p(b) = p(b′ ) по определению четности). Для этого добавим пару хорд c, c′ , чтобы образовать
треугольник a1 a2 c, см. рис. 48 (снизу). Тогда p(a1 ) + p(a2 ) + p(c) ≡ 0 (mod 2). С другой стороны,
имеется пятиугольник aa1 ca2 b, для которого в силу леммы 5.2 выполняется тождество
p(a) + p(a1 ) + p(c) + p(a2 ) + p(b) ≡ 0
(mod 2).
Следовательно, p(a) + p(b) ≡ 0 (mod 2), откуда p(a) = p(b) = p(b′ ). На полуокружности хорды b′
находится меньше концов хорд (с точностью до концов хорд c, c′ , которые не влияют на четность
хорд), чем на полуокружности, соответствующей хорде a, значит, по предположению индукции
p(b′ ) = 0, и хорда a четная.
Если концы a1 , a2 принадлежат одной хорде, то эта хорда четная (т.к. входит в первое движение
Рейдемейстера) и образует треугольник с хордами a и b. Следовательно, p(a) + p(b) ≡ 0 (mod 2) и
p(a) = p(b) = p(b′ ) = 0.
50
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
a1
a
a2
a2
a
a1
b
b
b’
b’
c
a1
a
c’
a2
a2
a
b
a1
c
b
b’
b’
c’
РИС. 48. Четная в гауссовой четности хорда
Лемма 5.4. Если хотя бы одна из хорд является нечетной в гауссовой четности и в то
же самое время является четной в другой четности P, то все хорды являются четными в
четности P.
Доказательство. Утверждение леммы можно переформулировать следующим образом: нечетные
в гауссовой четности хорды имеют одинаковую четность в любой четности. Доказательство последнего утверждения аналогично доказательству леммы 5.3.
Фиксировав какую-либо нечетную в гауссовой четности хорду a, мы можем любую нечетную
в гауссовой четности хорду b заменить, с помощью приема из леммы 5.3, хордой c, которая
вместе с хордой a входит во второе движение Рейдемейстера, т.е. четности хорд a и c совпадают,
следовательно, четности a и b совпадают.
Это завершает доказательство теоремы 5.3.
Учитывая утверждение 5.1, получаем
Следствие 5.3. Любая четность для плоских и виртуальных узлов происходит из гомологий
подлежащей поверхности. Таким образом, любая четность на виртуальных узлах задает
тривиальную четность на классических узлах.
Применяя предыдущие рассуждения, докажем следующую теорему.
Теорема 5.4. Для классических узлов (a priori мы не предполагаем их продолжение до виртуальных узлов) существует единственная четность — тривиальная четность.
Доказательство. Достаточно показать, что сумма четностей перекрестков классического узла,
образующих двуугольник или треугольник, в любой четности сравнима с нулем по модулю два.
Мы рассмотрим только треугольник. Пусть перекрестки a, b, c образуют треугольник. Если
мы можем применить третье движение Рейдемейстера к нашему треугольнику, то равенство
p(a) + p(b) + p(c) ≡ 0 (mod 2) следует из определения 5.3. В противном случае перекрестки образуют альтернированный треугольник. Применяя три вторых движения и одно третье движение
Рейдемейстера мы получим диаграмму K ′ (см. рис. 49), где следующие равенства верны:
p(b) + p(c) + p(d) ≡ 0 (mod 2),
p(e) + p(f ) + p(g) ≡ 0 (mod 2),
p(a) + p(f ) + p(g) ≡ 0
(mod 2),
p(e) + p(d) ≡ 0 (mod 2).
5. Четность в теории узлов
b
a
K
51
b
f
c
a
d
e
c
g
K’
РИС. 49. Альтернированный треугольник
Мы имеем p(a) = p(e) = p(d) ≡ p(b) + p(c) (mod 2). Следовательно, p(a) + p(b) + p(c) ≡ 0 (mod 2).
5.4. Функториальное отображение f . Приведенное в настоящем разделе отображение f для
четности из пункта 5.1.2 было впервые предложено Тураевым. Далее мы строим это отображение
для произвольной четности, удовлетворяющей ослабленным аксиомам четности.
Теорема 5.5. Пусть K — некоторая теория узлов, обладающая четностью, удовлетворяющей ослабленной четной аксиоматике. Построим отображение f , которое диаграмме K
сопоставляет диаграмму, получающуюся по следующему правилу.
Всякий четный классический перекресток диаграммы K остается перекрестком, а всякий
нечетный удаляется (т.е. при изображении мы на его месте ставим виртуальный перекресток).
Тогда отображение f корректно определено на классах узлов, т.е. переводит эквивалентные диаграммы в эквивалентные.
Замечание 5.7. В случае свободных узлов, когда в качестве диаграмм рассматриваются оснащенные 4-графы, операция f состоит в удалении четных перекрестков и последующем соединении
противоположных полуребер в одно ребро. В случае, когда диаграммы узлов изображаются на
плоскости или на поверхности, удаляемый перекресток помечается кружочком и рассматривается
как виртуальный перекресток.
Доказательство теоремы 5.5. Нам необходимо проверить, что если диаграммы K1 и K2 получаются друг из друга применением одного движения Рейдемейстера, то диаграммы f (K1 ) и f (K2 )
либо совпадают (при изображении на плоскости отличаются движением объезда), либо отличаются применением движения Рейдемейстера.
Действительно, в случае первого движения Рейдемейстера добавление петли под действием
отображения f превращается либо в добавление петли (если перекресток является четным), либо
в добавление виртуальной петли (последнее преобразование является частным случаем движения
объезда).
В случае второго движения Рейдемейстера, если оба перекрестка были нечетными для исходных
диаграмм, для f (K1 ) и f (K2 ) мы получаем движение объезда, а в случае, если оба перекрестка
были четными, мы получаем второе движение Рейдемейстера.
Наконец, в случае третьего движения Рейдемейстера мы можем получить третье движение
Рейдемейстера для f (K1 ) и f (K2 ), если все три перекрестка были четными, или одну из версий
движения объезда, если четным был либо один перекресток из трех, либо ни одного.
Отметим, что в силу аксиомы 4 все перекрестки, не участвующие в движении Рейдемейстера,
остаются неподвижными, что обеспечивает неизменность диаграммы f (K1 ) при переходе в f (K2 )
вне окрестности тех перекрестков, которые участвуют в движении Рейдемейстера.
Перейдем теперь к описанию функции f в случае конкретных теорий узлов с четностями.
52
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
a
РИС. 50. Гауссовы диаграммы и структуры источник-сток
5.4.1. Функция f в случае четности из пункта 5.1.2. Пусть K — виртуальная диаграмма,
задающая свободный узел, G(K) — соответствующая гауссова диаграмма, а At(K) — атом, соответствующий диаграмме K. Тогда имеет место следующая теорема.
Теорема 5.6. Атом At(K) ориентируем тогда и только тогда, когда все хорды диаграммы
G(K) являются четными.
В частности, свойство ориентируемости атома зависит лишь от свободного узла, соответствующего узлу K, и не зависит от структуры проход-переход в классических перекрестках диаграммы K.
Доказательство. Известно (предложение 3.1), что атом ориентируем тогда и только тогда, когда
на его остове можно задать структуру источник-сток, см. рис. 50 в центре.
Вспомним, что ребра графа — остова атома — соответствуют дугам хордовой (гауссовой) диаграммы. При этом соседние дуги на гауссовой диаграмме соответствуют противоположным ребрам.
Следовательно, структура источник-сток задает на гауссовой диаграмме ориентацию дуг, обладающую следующими двумя свойствами:
1) дуги гауссовой диаграммы чередуются, т.е. за каждой дугой, ориентированной по часовой
стрелке, следует дуга, ориентированная против часовой стрелки;
2) у каждой хорды на одном конце имеются две исходящие дуги, а на другом — две входящие.
Из этих условий легко следует, что для каждой хорды по одну сторону от нее имеется четное
число концов других хорд, откуда и вытекает четность хорды.
Пример 5.4. Рассмотрим гауссову диаграмму, изображенную на рис. 50 слева. На ней задана
ориентация дуг, задающая структуру источник-сток (см. опр. 3.10) на остове соответствующего
атома. Как нетрудно убедиться, один из атомов, соответствующих этой диаграмме, является сферическим (т.е. поверхность атома представляет собой сферу), следовательно, он ориентируем, т.е.
ориентируемы и все остальные атомы с тем же остовом.
На хордовой диаграмме, изображенной на рис. 50 справа, задание такой структуры невозможно,
ибо хорда a является нечетной (она зацеплена ровно с одной хордой). Поэтому чередующаяся
ориентация стрелок вдоль окружности хордовой диаграммы приводит к четырем входящим ребрам
на концах хорды a.
Таким образом, отображение f оставляет неизменными те диаграммы, которым соответствуют
ориентируемые атомы (напомним, что мы рассматриваем диаграммы только виртуальных узлов, а
не зацеплений). Если атом At(K), соответствующий диаграмме K, не ориентируем, то диаграмма
f (K) имеет строго меньше классических перекрестков, чем диаграмма K.
Отметим, что, вообще говоря, f 2 (K) ̸= f (K), ибо после удаления нечетных хорд хордовой диаграммы некоторые четные хорды могут стать нечетными. Так, например, для хордовой диаграммы
с четырьмя хордами a, b, c, d, у которой имеются три зацепленные пары хорд: (a, b), (a, c), (b, d),
после удаления нечетных хорд c, d, хорды a, b становятся нечетными.
Легко видеть, что для каждой диаграммы виртуального узла K с n перекрестками найдется такое число m < n, что f m (K) = f m+1 (K), т.е. атом, соответствующий диаграмме f m (K), является
ориентируемым.
5. Четность в теории узлов
53
Очевидно, что отображение, убивающее нечетные перекрестки, задается и на множестве атомов: достаточно лишь удалить все нечетные перекрестки и оставить структуру черных и белых
углов в оставшихся перекрестках.
Это приводит нас к следующей фильтрации на множестве атомов и виртуальных узлов. Пусть
At — атом, остов которого имеет одну уникурсальную компоненту. Тогда либо At является ориентируемым (в этом случае скажем, что атом At имеет градуировку нуль), либо неориентируемым.
Во втором случае существует единственное такое натуральное число n > 0, что f n (At) является
ориентируемым атомом, а f n−1 (At) не является ориентируемым атомом. В этом случае скажем,
что атом At имеет градуировку n.
Аналогично определяется и градуировка на множестве виртуальных узлов: скажем, что виртуальный узел K имеет градуировку 0, если у него есть диаграмма с ориентируемым атомом; узел
K имеет градуировку n > 0, если узел f n (K) имеет диаграмму с ориентируемым атомом, а узел
f n−1 (K) таковых диаграмм не имеет.
Таким образом, мы имеем естественное разбиение множества виртуальных узлов на подмножества: K0 ⊕ K1 ⊕ K2 ⊕ · · · ⊕ Kn ⊕ · · · .
Легко построить примеры, показывающие непустоту каждого из множеств Kn . Построим пример по индукции. Рассмотрим нечетную несократимую хордовую диаграмму, содержащую k хорд,
где k — некоторое фиксированное натуральное число. На первом шаге добавим k попарно незацепленных хорд, каждая из которых зацеплена ровно с одной хордой первоначальной диаграммы.
На l-ом шаге мы добавляем k попарно незацепленных хорд, каждая из которых зацеплена ровно с
одной хордой, добавленной на предыдущем шаге. Совершая n − 1 шагов, мы получим диаграмму
градуировки n.
Определение 5.6. Отображение, переводящее все виртуальные узлы в узлы с ориентируемыми
атомами и оставляющее на месте узлы с ориентируемыми атомами, назовем проекционным.
Такой подход позволяет получить простое доказательство следующей теоремы Виро-Мантурова
(впервые доказанной в 2005 и впервые опубликованной в [77]).
Теорема 5.7. Пусть K, K ′ — две эквивалентные диаграммы виртуальных узлов, имеющие
ориентируемые атомы. Тогда существует цепочка преобразований Рейдемейстера K = K0 →
K1 → · · · → Kn = K ′ такая, что все атомы, соответствующие диаграммам Ki , являются
ориентируемыми.
Доказательство. Рассмотрим цепочку диаграмм K = L0 → L1 → · · · → Ln = K ′ таких, что
диаграммы Li и Li+1 связаны между собой классическими движением Рейдемейстера.
Пусть максимальное количество перекрестков по всем диаграммам Li равно k.
Применим к цепочке преобразование f . Получим цепочку диаграмм K = L0 = L′0 → L′1 →
. . . L′n = Ln = K ′ , в которой каждые две соседние диаграммы получаются друг из друга движением
Рейдемейстера либо совпадают (т.е. получаются друг из друга движением объезда).
Применяя преобразование f и далее (всего k раз начиная с исходной цепочки), мы получим
цепочку диаграмм f k (K) = K = L0 → f k (L1 ) → · · · → f k (Ln ) = Ln = K ′ , в которой атомы,
соответствующие всем диаграммам, являются ориентируемыми, и каждые две соседние диаграммы
либо совпадают (связаны движением объезда), либо отличаются друг от друга одним из движений
Рейдемейстера.
Замечание 5.8. Исходное доказательство теоремы Виро-Мантурова в общем случае (для виртуальных зацеплений из произвольного числа компонент) опирается на геометрию виртуальных
узлов и теорему Куперберга. В настоящее время авторам известно комбинаторное доказательство
этой теоремы в общем случае, основанное на понятии относительной четности для диаграмм
виртуальных зацеплений [119].
5.4.2. Иерархия четностей на виртуальных узлах. Как следует из теоремы Виро-Мантурова,
виртуальные узлы, которым соответствуют ориентируемые атомы, образуют естественный подкласс всех виртуальных узлов, для определения эквивалентности которых можно использовать
лишь те движения Рейдемейстера, которые оставляют диаграммы внутри этого подкласса.
В частности, этот класс (обозначим его через V1 ) включает в себя классические узлы. Мы
покажем, что имеется естественная фильтрация на множестве виртуальных узлов (не связанная
54
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
с градуировкой n, приведенной выше):
V0 ⊃ V1 ⊃ V2 ⊃ · · · ⊃ Vn ⊃ · · · ,
которая начинается с множества V0 всех виртуальных узлов и имеет своим пределом «узлы индекса 0» V∞ — множество узлов, содержащее в себе все классические узлы.
Итак, пусть K — виртуальная диаграмма, G(K) — ее гауссова диаграмма. Расставим на диаграмме G(K) знаки и стрелки обычным способом (знак плюс соответствует перекрестку
, а
знак минус — перекрестку
): стрелка направлена от прообраза дуги, образующей переход, к
прообразу дуги, образующей проход.
Каждому классическому перекрестку мы сопоставим индекс, который будет представлять собой
натуральное число или нуль. Пусть v — классический перекресток диаграммы K, а c(v) — соответствующая ему (ориентированная) хорда диаграммы G(K). Рассмотрим все хорды диаграммы
G(K), зацепленные с хордой c(v). Посчитаем для них сумму знаков тех хорд, которые пересекают
c(v) слева направо и вычтем сумму знаков тех хорд, которые пересекают хорду c(v) справа налево.
Модуль полученной величины назовем индексом хорды и обозначим его через ind(v) ≡
ind(c(v)).
Ясно, что если атом, соответствующий диаграмме K, ориентируемый, то индексы хорд диаграммы G(K) четные.
Следовательно, V1 состоит из тех узлов, у диаграмм которых индекс каждой из хорд является
четным.
Соберем воедино несколько фактов, доказательство которых сводится к простой проверке.
Утверждение 5.3.
1. В первом движении Рейдемейстера может участвовать лишь хорда
индекса нуль.
2. Во втором движении Рейдемейстера участвуют две хорды одинаковых индексов.
3. Индекс хорды не меняется при третьем движении Рейдемейстера
ind(a) = ind(a′ ),
ind(b) = ind(b′ ),
ind(c) = ind(c′ ),
кроме того, если три хорды a, b, c участвуют в третьем движении Рейдемейстера, то
ind(a) ± ind(b) ± ind(c) = 0, см. рис. 39.
4. Индекс хорды, не участвующей в некотором движении Рейдемейстера, не меняется после применения к диаграмме этого движения Рейдемейстера.
5. У классической диаграммы все перекрестки имеют индекс нуль.
Заметим сначала, что свойство равенства индекса нулю является свойством ослабленной четности. То же самое верно для свойства равенства нулю по модулю целого числа. Следовательно,
отображение, удаляющее хорды ненулевого индекса, является корректно определенным в любой
теории узлов, в которой имеется индекс.
Кроме того, описанные выше свойства индекса показывают, что индекс можно использовать для
определения четности.
Действительно, из утверждения 5.3 вытекает, что на диаграммах из V1 можно ввести следующую четность: пусть K — диаграмма узла из V1 ; объявим четными те перекрестки диаграммы
K, которые имеют индекс, кратный четырем, а нечетными — те, которые имею индекс, имеющий
остаток 2 от деления на 4.
Из утверждения 5.3 вытекает, что так определенная четность удовлетворяет всем аксиомам
четности.
Применяя отображение f к узлам из V1 , удаляющее перекрестки, имеющие индекс, не делящийся на 4, мы можем выйти за пределы класса V1 . Тем не менее, если две диаграммы x, y из
V1 эквивалентны, то диаграммы f (x) и f (y) эквивалентны (даже если они не лежат в V1 ).
Рассуждая аналогичным образом и далее мы определим множества Vk диаграмм, у которых все
перекрестки имеют индексы, делящиеся на 2k , а также V∞ как множество диаграмм, у которых
все перекрестки имеют индекс 0.
Имеется набор отображений fk : Vk → V0 , который состоит в удалении всех хорд индекса
сравнимого с 2k по модулю 2k+1 . Все эти отображения переводят эквивалентные диаграммы в
эквивалентные.
Имеет место
5. Четность в теории узлов
55
2
1
4
2
4
3
+
+
3
1 -
РИС. 51. Неклассическая диаграмма из класса V∞
Теорема 5.8. Пусть K, K ′ — две диаграммы виртуальных узлов из Vk (где k — натуральное число или символ ∞), задающие эквивалентные виртуальные узлы. Тогда существует
цепочка K = K0 → K1 · · · → Kn = K ′ диаграмм из Vk , в которой любые соседние диаграммы
отличаются одним из движений Рейдемейстера или движением объезда.
Эта теорема доказывается так же как и теорема 5.7 посредством функториального отображения,
удаляющего все хорды, индекс которых не делится на 2k (в случае конечного k) или удаляющего
все хорды с ненулевым индексом (для k = ∞).
Отметим, что класс V∞ довольно интересен: он представляет собой «аппроксимацию» классических узлов виртуальными узлами, и все инварианты, определенные на V∞ , могут быть перенесены
на все виртуальные узлы посредством отображения f .
Пример неклассической диаграммы K из V∞ , изображен на рис. 51.
На гауссовой диаграмме на рисунке изображена диаграмма G(K) со стрелками и со знаками.
Легко видеть, что на диаграмме G(K) стрелки, соответствующие перекресткам 1 и 2, противонаправленны, что гарантирует равенство нулю индексов хорд 3 и 4. Противоположными являются и
стрелки, соответствующие перекресткам 3 и 4.
5.4.3. Отображение f в случае четности из пункта 5.1.3. Пусть K — диаграмма классического или виртуального зацепления из двух компонент. Отображение f заменяет все перекрестки,
образованные обеими компонентами диаграммы K, на виртуальные. Геометрический смысл операции f таков: каждому зацеплению L = L1 ∪ L1 она сопоставляет распадающееся зацепление из
двух компонент L1 и L2 .
5.4.4. Отображение f в случае четности из пункта 5.1.4. Это отображение сопоставляет узлам в полнотории «виртуальные узлы в полнотории», т.е. классы эквивалентности диаграмм в
S 1 × I 1 с классическими и виртуальными перекрестками по движениям Рейдемейстера.
Получаемые в качестве образа отображения f узлы можно исследовать далее различными
способами, например, рассматривая их как обычные виртуальные узлы (посредством вложения
S 1 × I 1 → R2 ) либо исследуя дополнительные четности.
Аналогичным образом можно рассматривать четность f для узлов на утолщенной поверхности,
которая приводит к теории «виртуальных узлов на той же утолщенной поверхности».
5.5. Инварианты. Оказывается, что если некоторая теория узлов K обладает четностью, удовлетворяющей всем аксиомам четности 1, 2, 3 а), 3 б), 4, то это позволяет строить инварианты
узлов K со значениями в линейных комбинациях графов. Такие линейные комбинации графов
происходят из диаграмм исходного узла посредством разведений и, следовательно, несут в себе
много информации об узле в целом: о количестве перекрестков на его возможных диаграммах и
об их взаимном расположении.
В частности, для некоторых теорий узлов с четностью, удовлетворяющей аксиомам 1, 2, 3 а), 3
б), 4, легко доказываются теоремы о минимальности диаграмм по количеству перекрестков.
5.5.1. Разведения. Пусть дана диаграмма K в некоторой теории узлов K. Нашим основным примером будет теория свободных узлов, в которой в качестве диаграмм будут выступать оснащенные
4-графы, поэтому мы будем часто пользоваться как термином «диаграмма», так и термином «граф».
56
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
d
a
d
c
a
d
b
c
c
b
a
b
РИС. 52. Два разведения вершины оснащенного графа
Определим понятие разведения диаграммы (графа). В дальнейшем словом «разведение» мы
будем называть как процесс разведения, так и диаграмму, получающуюся в результате разведения.
Отметим, что идея «разведения» 4-графа изучалась Нэш-Уильямсом, Буше и др., которые назвали
ее разделение, см., напр., [177, 22].
Определение 5.7. Пусть v — вершина (перекресток) диаграммы K, в которой сходятся четыре
полуребра a, b, c, d, причем полуребро a противоположно полуребру c, а полуребро b противоположно полуребру d. Назовем разведениями диаграммы K в вершине v один из двух оснащенных
4-графов, полученных из диаграммы K удалением вершины v и склейкой ребер в другом порядке:
a − b, c − d или a − d, b − c, см. рис. 52.
При этом оснащение остальных вершин (кроме v) у обоих разведений остается тем же, что и у
диаграммы (графа) K.
Можно рассматривать и дальнейшие разведения диаграммы (графа) K в нескольких вершинах. Каждое разведение представляет собой результат последовательного разведения диаграммы
в нескольких вершинах. В случае, когда диаграммы в теории узлов K содержат дополнительную информацию в перекрестках, то под разведением будет пониматься диаграмма, получаемая
«забыванием» этой информации. Так, в случае разведения виртуальной диаграммы результатом
разведения будет являться оснащенный 4-граф. Будем обозначать результаты разведения диаграммы K через Ks , где s — это способ разведения (или состояние) диаграммы K.
Пусть K — диаграмма, и пусть v1 , . . . , vn — все четные перекрестки диаграммы K. Назовем четным разведением диаграммы K некоторое ее разведение во всех четных перекрестках
v1 , . . . , vn . Таким образом, у диаграммы K имеется 2n четных разведений.
Назовем четное разведение оснащенного 4-графа K (относительно любой четности) 1-четным
разведением, если в результате разведения количество уникурсальных компонент получающегося
оснащенного 4-графа равно единице.
В случае теорий кос или танглов в качестве исходных объектов допускаются графы с вершинами валентности один (называемые концевыми) и валентности четыре (каждая из которых
является оснащенной), а в случае танглов еще и со свободными компонентами — отдельно стоящими окружностями. В этом случае результаты разведений также представляют собой графы с
вершинами валентности 1 и 4 и свободными окружностями, причем множество вершин валентности 1 каждой разведенной диаграммы совпадает с множеством вершин валентности 1 диаграммы
до разведения.
5.5.2. Оснащенные 4-графы. Для каждого оснащенного 4-графа K его разведения будут представлять собой оснащенные 4-графы.
Для виртуальной диаграммы L разведениями будут являться виртуальные диаграммы, соответствующие разведениям оснащенного 4-графа K(L), получаемого из L забыванием дополнительной
информации в классических перекрестках.
Далее мы будем интересоваться следующими множествами разведений свободного графа (виртуальной диаграммы): множеством всех разведений S, множеством всех четных разведений Sчет ,
5. Четность в теории узлов
57
множеством всех разведений с одной уникурсальной компонентой S1 и множеством всех четных
разведений с одной уникурсальной компонентой Sчет,1 . Элементы соответствующих множеств
мы будем обозначать через s, sчет , s1 , sчет,1 соответственно. Для упрощения обозначений при
суммировании мы будем обычно опускать множество разведений, по которым будет происходить
суммирование (оно будет связано с той переменной, которая пробегает это множество: s, sчет , s1
или sчет,1 ).
Оснащенные 4-графы, пробегающие одно из этих множеств разведений, будут использоваться
в дальнейшем для построения инвариантов оснащенных зацеплений или других теорий узлов с
четностью.
5.5.3. Свободные узлы и зацепления. Теория свободных узлов (не зацеплений) описывается гауссовыми диаграммами и движениями Рейдемейстера на них (для зацеплений строится гауссова
диаграмма на многих окружностях). При этом переход от узлов к свободным узлам соответствует
переходу от гауссовых диаграмм с метками на ребрах и ориентациями ребер к гауссовым диаграммам без меток и ориентаций.
5.5.4. Линейное пространство G. Рассмотрим оснащенные 4-графы с одной уникурсальной компонентой по отношению эквивалентности, порожденному вторым движением Рейдемейстера.
Определим линейное пространство G как множество Z2 -линейных комбинаций таких классов
эквивалентности.
e Линейное пространство G̃ — это множество Z2 -линейных
5.5.5. Линейное пространство G.
комбинаций следующих объектов. Рассматриваются все оснащенные 4-графы, профакторизованные по следующим соотношениям эквивалентности:
1) второе движение Рейдемейстера;
2) L ⊔ ⃝ = 0, т.е. оснащенный 4-граф, имеющий больше одной компоненты, одна из которых
тривиальна, полагается равным нулю.
Имеет место естественное отображение g : G̃ → G, отображающее в нуль все классы эквивалентности оснащенных графов, имеющих более одной уникурсальной компоненты. Очевидно, что
отображение g является эпиморфизмом групп.
5.5.6. Инварианты [ · ], { · }. Приводимые ниже инварианты будут явно определены для свободных узлов и зацеплений относительно любой четности, удовлетворяющей всем аксиомам четности
из определения 5.3.
Эти определения прямо продолжаются на свободные танглы — объекты, задаваемые графами,
имеющими помимо вершин валентности четыре свободные концы валентности 1 (в частности, на
свободные косы и длинные свободные узлы). Явных определений для случая свободных танглов
мы приводить не будем, оставляя их в качестве упражнения для читателя.
Так как любое виртуальное зацепление порождает свободное зацепление посредством «забывания» структур классических перекрестков (проход–переход и локальное число закручивания),
но мы помним структуру противоположных ребер, то эти инварианты будут «подниматься» до
инвариантов виртуальных узлов и зацеплений в любой четности, которая определяется на соответствующих свободных зацеплениях.
Перейдем к построению инвариантов [·] и {·} свободных узлов, которые будут принимать значения в G и в G̃ соответственно.
Пусть K — оснащенный 4-граф. Инвариант {·} задается по формуле
∑
{K} =
Ksчет ∈ G̃,
sчет
где из обозначений следует, что сумма берется по всем четным разведениям sчет оснащенного
4-графа K, которые рассматриваются как элементы из G̃.
Теорема 5.9. Скобка {·} является инвариантом свободных зацеплений.
Доказательство. Проверим инвариантность скобки {·} относительно движений Рейдемейстера.
Здесь мы будем использовать те свойства четности 1, 2, 3 а), 3 б), 4, которым удовлетворяют
перекрестки диаграмм, подвергающихся движениям Рейдемейстера.
58
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Пусть диаграммы K и K ′ отличаются друг от друга движением Ω1 , при этом диаграмма K ′
содержит на одну вершину больше, чем диаграмма K, и эта вершина обозначена через v.
Отметим, что вершина v является четной согласно первой аксиоме четности. Одно из разведений
диаграммы K ′ в вершине v приводит к отдельно стоящей тривиальной компоненте, таким образом,
любое четное разведение диаграммы K ′ , в которой вершина v разведена неправильным образом,
приведет к отдельно стоящей тривиальной компоненте, что даст нулевой элемент из G̃.
Разведение диаграммы K ′ в вершине v правильным образом приводит к диаграмме K, что дает
взаимно однозначное соответствие четных разведений для K и K ′ , не имеющих отдельно стоящих
тривиальных окружностей.
Таким образом мы доказали инвариантность скобки {·} относительно первого движения Рейдемейстера.
При втором и третьем движениях Рейдемейстера Ω2 и Ω3 мы покажем, что {K} + {K ′ } ≡ 0
(mod Z2 ) посредством разбиения на пары всех диаграмм, входящих в {K}+{K ′ }, представляющих
нетривиальные элементы из G̃. В силу того, что G̃ — линейное пространство над Z2 , это будет
означать равенство {K} = {K ′ }.
Пусть K ′ получается из K вторым движением Рейдемейстера, добавляющим два перекрестка
v1 и v2 . Если оба эти перекрестка нечетные, то имеет место очевидное взаимно однозначное соответствие между множеством четных разведений диаграммы K и множеством четных разведений
диаграммы K ′ . Соответствующие разведения получаются друг из друга применением «одного и
того же» движения Рейдемейстера, относящегося к вершинам v1 и v2 . Если вершины v1 и v2
обе являются четными, то имеются четыре разведения диаграммы K ′ в этих вершинах: →
,
→
,
→
,
→
.
Отметим, что разведение
имеет отдельно стоящую окружность, которая будет оставаться
таковой при последующих разведениях в четных перекрестках. Таким образом, в {K ′ } такие
слагаемые учитываться не будут.
Далее, разведения
и
представляют собой один и тот же оснащенный 4-граф (при условии совпадения разведений во всех оставшихся перекрестках). Таким образом, эти разведения
сокращаются в {K ′ }.
Четные разведения типа
диаграммы K ′ очевидным образом находятся во взаимно однозначном соответствии c четными разведениями диаграммы K и дают оснащенные 4-графы.
Пусть теперь диаграмма K переводится в диаграмму K ′ движением Ω3 . Из трех перекрестков
диаграммы K, участвующих в движении Рейдемейстера, четными могут быть либо три перекрестка, либо один.
Если три перекрестка диаграммы K, участвующие в движении Рейдемейстера, четные, то мы
имеем семь типов слагаемых в {K} (и семь типов слагаемых в {K ′ }): в каждой из трех вершин мы
имеем две возможности разведения, при этом одна из восьми возможностей приводит к отдельно
стоящей тривиальной окружности в K, а одна из возможностей приводит к отдельно стоящей
тривиальной окружности в K ′ (что не дает вклада в {K} или в {K ′ }). Рассматривая K (на рис. 53
слагаемые, соответствующие K, стоят слева, а слагаемые, соответствующие K ′ , стоят справа), мы
видим, что три из этих типов приводят к совпадающим наборам диаграмм (эти наборы обозначены
через 1), поэтому в G̃ два набора сокращаются друг с другом, и остается один набор. Аналогично
для случая K ′ имеются три «одинаковых» типа разведения (они обозначены через 2 на рис. 53).
Таким образом, и в {K}, и в {K ′ } остаются пять типов слагаемых: 1, 2, 3, 4, 5.
В этих пяти случаях имеется однозначное соответствие (см. рис. 53), которое приводит к равенству {K} = {K ′ }.
Если среди трех вершин, участвующих в Ω3 , мы имеем ровно одну четную вершину в правой и
в левой частях (скажем a → a′ ), мы приходим к ситуации, изображенной на рис. 54.
Из этого рисунка мы видим, что те разведения, где вершина a (соотв., a′ ) разведена вертикально, дают совпадающие слагаемые для {K} и для {K ′ }, а те разведения, где a и a′ разведены
горизонтально, находятся в однозначном соответствии для диаграмм K и K ′ , причем соответствующие графы отличаются друг от друга применением двух вторых движений Рейдемейстера.
Это доказывает, что {G} = {G′ } в G̃.
5. Четность в теории узлов
59
=
1
1
=1
5
4
1
3
3
=
2
4
5
2
2
=
2
=
РИС. 53. Соответствия разведений при движении Ω3 с тремя четными вершинами
a
a
РИС. 54. Соответствие между разведениями для Ω3 с одной четной вершиной
Инвариант [·] задается по формуле
[K] =
∑
Ks1,чет ∈ G,
(5.1)
s1,чет
где сумма берется по всем четным разведениям диаграммы K, дающим одну окружность.
Очевидно, что [K] = g({K}), что приводит к теореме
Теорема 5.10. Скобка [·] является инвариантом свободных узлов.
Иногда нам будет удобно пользоваться скобкой [·] именно в определении по формуле (5.1).
Замечание 5.9. Отметим, что инварианты, приведенные выше, можно строить исходя из любой
четности, удовлетворяющей аксиомам 1, 2, 3 а), 3 б), 4.
Инварианты {·} и [·] переводят некоторый класс эквивалентности (диаграмм по движениям Рейдемейстера) в линейную комбинацию классов эквивалентности (диаграмм по второму движению
Рейдемейстера и обращению в нуль некоторых классов диаграмм). Оказывается, что множества
60
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
G и G̃ легко описываются алгоритмически: у каждого элемента любого из этих множеств имеется единственный минимальный представитель, который находится посредством последовательного
упрощения. Под упрощением мы понимаем второе движение Рейдемейстера, уменьшающее количество перекрестков на 2, а также (в случае элементов из G̃) преобразование, обращающее в нуль
диаграмму с более чем одной уникурсальной компонентой, у которой имеется отдельно стоящая
тривиальная компонента.
Более точно сказанное выше можно сформулировать в виде леммы, которой мы предпошлем
определения.
Назовем оснащенный 4-граф упрощаемым, если он либо содержит компоненту без вершин, либо
содержит две вершины v1 и v2 , соединенные парой ребер p, q таких, что p, q являются соседними
как в вершине v1 , так и в вершине v2 .
Второй случай — это как раз ситуация, в которой к графу можно применить второе уменьшающее движение Рейдемейстера.
Оснащенные 4-графы, не допускающие упрощения, назовем минимальными. Скажем, что граф
Γ0 получается из графа Γ последовательным упрощением, если существует цепочка оснащенных
4-графов Γ = Γn → · · · → Γ1 → Γ0 , в которой каждый следующий граф получается из предыдущего
применением второго упрощающего движения Рейдемейстера.
Назовем минимальным представителем графа Γ минимальный граф, получаемый из графа Γ
последовательным упрощением.
В случае G понятия минимального и неупрощаемого графов совпадают.
Лемма 5.5. Если оснащенные 4-графы Γ0 и Γ′0 с одной уникурсальной компонентой минимальны, и оба получаются из оснащенного 4-графа Γ последовательным упрощением, то Γ0
изоморфен графу Γ′0 .
Лемма утверждает, что у каждого оснащенного 4-графа с одной уникурсальной компонентой
минимальный представитель единствен.
Из этой леммы вытекает
e с одной уникурсальной компонентой эквивалентны
Лемма 5.6. Оснащенные 4-графы Γ и Γ
в G, если и только если у них совпадает минимальный представитель.
Доказательство. Выведем лемму 5.6 из леммы 5.5. Утверждение ⇐= очевидно. Предположим,
e в G, при этом минимальные представители графов Γ и Γ
e различны. Пусть ∆ и ∆′ —
что Γ = Γ
два оснащенных графа, получающиеся один из другого вторым движением Рейдемейстера, при
этом граф ∆′ имеет на две вершины больше, чем граф ∆. Тогда по определению минимального
представителя и в силу леммы 5.5 мы заключаем, что минимальные представители для ∆ и
e вторых движений Рейдемейстера,
∆′ совпадают. Рассмотрев цепочку Γ = Γ1 → · · · → Γk = Γ
e замечаем, что минимальные представители любых двух соседних графов в
связывающих Γ с Γ,
e откуда
этой цепочке совпадают. Поэтому совпадают и минимальные представители графов Γ и Γ,
следует эквивалентность этих графов в G.
Доказательству леммы 5.5 предпошлем два простых утверждения.
Утверждение 5.4. Предположим, что оснащенный 4-граф Γ с одной уникурсальной компонентой имеет два неизоморфных минимальных представителя. Тогда найдется такое упроe графа Γ (Γ
e может совпадать с Γ), для которого имеет место следующее.
щение Γ
e найдутся такие неизоморфные оснащенные
Среди минимальных представителей графа Γ
e найдутся такие
4-графы Γ0 и Γ′0 , а среди элементарных упрощений оснащенного 4-графа Γ
′
графы Γ1 и Γ1 , что Γ0 является одним из минимальных представителей для Γ1 , но не для Γ′1 .
Доказательство. Выберем два неизоморфных минимальных представителя Γ0 и Γ′0 графа Γ и
рассмотрим цепочку элементарных преобразований от Γ к Γ0 . В начальный момент у графа Γ
среди минимальных представителей имеется граф Γ′0 , а в конце цепочки среди минимальных
представителей графа Γ0 минимального представителя Γ′0 уже нет (так как Γ0 неуменьшаем). Выбирая в цепочке от Γ до Γ0 последний по счету граф, имеющий граф Γ0 в качестве минимального
e получаем требуемое.
представителя, и обозначая этот граф через Γ,
5. Четность в теории узлов
61
Утверждение 5.5. Если оснащенные 4-графы Γ1 и Γ′1 получаются из оснащенного 4-графа Γ
одним элементарным упрощением каждый, то либо графы Γ1 и Γ′1 изоморфны, либо найдется
оснащенный 4-граф Γ′2 , который может быть получен одним элементарным упрощением из
каждого из графов Γ1 , Γ′1 .
Доказательство. Достаточно рассмотреть вершины {α, β} графа Γ, в которых происходит упрощение Γ → Γ1 и вершины {α′ , β ′ } в которых происходит упрощение графа Γ → Γ′1 . Если множество
{α, β} ∪ {α′ , β ′ } состоит из двух или трех элементов, то очевидно, что графы Γ1 и Γ′1 изоморфны.
Если это множество состоит из четырех элементов, то легко видеть, что к графу Γ1 можно применить элементарное упрощение в вершинах {α′ , β ′ } и в результате получить граф, изоморфный
графу, получаемому из Γ′1 применением элементарного упрощения в вершинах {α, β}.
Доказательство леммы 5.5. Рассмотрим оснащенный 4-граф Γ с одной уникурсальной компонентой и предположим, что он имеет более одного минимального представителя.
e графа Γ, что среди графов, получающихся
В силу утверждения 5.4 имеется такое упрощение Γ
e одним элементарным упрощением, можно выбрать такую пару Γ1 и Γ′ , для которой один
из Γ
1
из графов Γ0 или Γ′0 является минимальным представителем для Γ1 , но не для Γ′1 . Без ограничения общности будем считать, что этот граф Γ0 . Согласно утверждению 5.5 существует граф Γ′2 ,
получаемый элементарным упрощением как из графа Γ1 , так и из графа Γ′1 .
Так как по условию Γ′1 в числе минимальных представителей не имеет графа Γ0 , то и граф
′
Γ2 не имеет в числе минимальных представителей графа Γ0 . С другой стороны, так как Γ0 является минимальным представителем для Γ1 , то у Γ1 имеется по крайней мере два минимальных
представителя.
Переобозначая Γ1 через Γ и повторяя описанное выше рассуждение, мы получим, что один
из графов (обозначим его через Γ2 ), получаемых элементарным преобразованием из Γ1 , также
имеет по крайней мере два неизоморфных минимальных представителя. Рассуждая также и далее
получим цепочку Γ → Γ1 → Γ2 → . . . графов, каждый следующий из которых получается из
предыдущего упрощением, и при этом каждый граф Γi имеет по крайней мере два минимальных
представителя.
В итоге получим противоречие для того из графов Γi , который является неуменьшаемым.
Итак, мы полностью описали, как распознавать эквивалентность оснащенных 4-графов из G:
нужно взять их минимальные представители и сравнить. В случае G минимальные графы не могут
быть упрощаемыми, т.к. в них (по определению минимальности) не бывает двуугольников, которые можно было бы упростить вторым движением Рейдемейстера, а количество уникурсальных
компонент равно единице.
В случае графов из G̃ минимальным представителем может быть упрощаемый граф, т.е. граф,
у которого имеется отдельно стоящая компонента. В последнем случае такой граф эквивалентен
нулю в G̃.
По аналогии с леммой 5.6 для G̃ доказывается следующая
Лемма 5.7. Оснащенные графы Γ и Γ′ из G̃ эквивалентны, если их минимальные предe и Γ
e ′ либо оба содержат отдельно стоящие тривиальные компоненты, либо не
ставители Γ
содержат отдельно стоящих тривиальных компонент и являются изоморфными.
5.5.7. Применения инвариантов. Используя четность, построенную в пункте 5.1.4, и инвариант
[·], определенный для этой четности, можно доказать следующую
Теорема 5.11. Пусть K — оснащенный 4-граф, гауссова диаграмма которого является
нечетной несократимой. Тогда у любого оснащенного 4-графа K ′ , задающего тот же свободный узел, что и K, найдется одно из разведений, которое как оснащенный 4-граф изоморфно
оснащенному 4-графу K.
Очевидно, что следствием этой теоремы является теорема 5.1.
Пример 5.5. Оснащенный 4-граф, задаваемый хордовой диаграммой, изображенной на рис. 55,
является нечетным несократимым.
62
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 55. Нечетная несократимая хордовая диаграмма и ее граф пересечения
Легко видеть, что множество нечетных несократимых гауссовых диаграмм бесконечно, откуда следует и бесконечность множества различных минимальных оснащенных 4-графов.
Теорема 5.11 является следствием фундаментального, но просто доказываемого утверждения.
Утверждение 5.6. Для нечетного несократимого оснащенного 4-графа K с одной уникурсальной компонентой имеет место равенство
[K] = K.
(5.2)
В равенстве (5.2) в левой части граф K понимается как представитель свободного узла, а в
правой части — как представитель элемента из G.
Доказательство утверждения 5.6 очевидно: так как все перекрестки оснащенного 4-графа K
являются нечетными, то в формуле для [K] разводить нужно пустое множество перекрестков.
Таким образом, мы получаем единственное слагаемое, представляющее собой оснащенный 4-граф
K.
Доказательство теоремы 5.11. Выведем теорему 5.11 из утверждения 5.6. Пусть оснащенный
4-граф K ′ эквивалентен оснащенному 4-графу K как свободный узел. Тогда [K ′ ] = [K] = K.
e эквивалентное графу K как
Следовательно, у графа K ′ имеется хотя бы одно разведение K,
e Далее можно заметить,
элемент из G. Поэтому K является минимальным представителем для K.
′
что если оснащенный 4-граф L получается из L одним элементарным упрощением, то граф L′
получается из L разведением в двух вершинах (тех самых, в которых мы проводили элементарное
e получается разведением некоторых вершин графа K ′ , а граф
упрощение). Следовательно, граф K
e Отсюда следует, что K получается разведением из K.
e
K получается разведением графа K.
Аналогичные результаты о минимальности можно получать и для зацеплений из произвольного
количества компонент. Для этого вместо скобки [·] и четности из пункта 5.1.2 можно использовать,
например, скобку {·} и четность из пункта 5.1.3. А именно, полностью аналогично теореме 5.11
доказывается
Теорема 5.12. Пусть L — оснащенный 4-граф с двумя уникурсальными компонентами, при
этом все перекрестки принадлежат обеим компонентам и к L не применимо второе уменьшающее движение Рейдемейстера. Тогда у любого оснащенного 4-графа L′ , задающего то же
свободное зацепление, что и L, найдется разведение, изоморфное L как оснащенный 4-граф.
Доказательство. По определению инварианта {·} для четности из пункта 5.1.3, имеем {L} = L
(заметим, что инвариант [·] в четности из пункта 5.1.2 не дает никакой информации, так как
после разведения пустого множества перекрестков у диаграммы L мы получаем снова диаграмму
L, которая имеет больше одной уникурсальной компоненты и, следовательно, [L] = 0).
Так как граф L не уменьшаем посредством второго движения Рейдемейстера, то в G̃ имеет
место L ̸= 0. Далее, для любой диаграммы L′ , дающей то же свободное зацепление, что и L,
имеет место {L′ } = L. Отсюда следует, что одно из разведений для L′ представляет элемент,
эквивалентный L в G̃, из чего, в свою очередь, следует, что сам оснащенный 4-граф L получается
из L′ разведением.
В качестве примера приведем следующее
Утверждение 5.7. Свободное зацепление L1 , приведенное на рис. 56, минимально, а соответствующий ему атом является ориентируемым.
5. Четность в теории узлов
63
РИС. 56. Минимальный представитель двухкомпонентного зацепления
Доказательство. Доказательство ориентируемости соответствующего атома следует из непосредственной проверки условия источник-сток. Минимальность вытекает из теоремы 5.12.
Заметим, что примеры минимальных диаграмм оснащенных зацеплений в случае неориентируемого атома можно устанавливать проще: простейшим таким примером является оснащенное
зацепление из двух компонент с одной вершиной, принадлежащей обеим компонентам.
Однако такому остову соответствуют неориентируемые атомы, так как остов не имеет ориентации, удовлетворяющей условию источник-сток.
Оказывается, что методы, приведенные выше, позволяют доказывать минимальность и для диаграмм свободных узлов, которым соответствуют ориентируемые атомы. Далее мы покажем, как из
этого можно вывести нетривиальность свободных узлов, которым соответствуют ориентируемые
атомы, т.е. таких узлов, задаваемых такими оснащенными 4-графами, у которых все вершины
четны.
5.5.8. Необратимость свободных зацеплений. Естественной операцией на множестве свободных узлов и зацеплений является обращение ориентации. Введем обозначение: если K — ориентированный свободный узел (оснащенный 4-граф), то через K мы будем обозначать свободный
узел (оснащенный 4-граф), полученный из K обращением ориентации. Аналогично, для свободного зацепления L через L мы будем обозначать свободное зацепление получающееся обращением у
L всех компонент.
В настоящем разделе мы покажем существование необратимых свободных зацеплений: L ̸= L.
Для этого нам придется модифицировать скобку {·} таким образом, чтобы входящие в нее в
качестве слагаемых графы несли в себе информацию об ориентации исходного зацепления. Через
|K|, |L| мы будем обозначать неориентированные узлы и зацепления, получаемые из K и L
забыванием ориентации.
Мы докажем следующую теорему.
Теорема 5.13. Пусть L = L1 ∪ L2 — оснащенный 4-граф, представляющий собой диаграмму ориентированного свободного зацепления из двух компонент L1 , L2 , и пусть при этом
выполнены следующие условия.
1. Все перекрестки диаграммы зацепления L образованы обеими компонентами L1 и L2 .
2. К оснащенному 4-графу L не применимо уменьшающее второе движение Рейдемейстера.
3. Общее количество перекрестков диаграммы L нечетно.
4. Оснащенный ориентированный 4-граф L не изоморфен ни одному из графов L1 ∪ L2 ,
L1 ∪ L2 с учетом ориентации.
Иными словами, замена ориентации компоненты L1 меняет 4-граф вне зависимости
от ориентации компоненты L2 .
5. Не существует изоморфизма оснащенного 4-графа |L| на себя, переводящего |L1 | в |L2 |,
а |L2 | — в |L1 |.
Тогда диаграмма L не эквивалентна диаграмме L.
64
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Первые два условия этой теоремы гарантируют минимальность диаграммы L согласно теореме 5.12.
Ясно, что диаграмма L также является минимальной в силу той же теоремы. Тем не менее,
скобка {·} не позволяет различать зацепления L и L, так как все слагаемые в скобке представляют
собой классы эквивалентности неориентированных 4-графов.
Модифицируем теперь скобку {·}. Заметим, что для двухкомпонентных зацеплений нечетность
количества перекрестков, образованных двумя компонентами, является инвариантным свойством.
Пусть H — множество классов эквивалентности Z2 -линейных комбинаций оснащенных 4-графов
с двумя уникурсальными компонентами, одна из которых ориентирована, по двум соотношениям
эквивалентности:
1. Второму движению Рейдемейстера (которое учитывает ориентацию ориентированной компоненты).
2. Соотношению L ⊔ ⃝ = 0, где нулю приравниваются диаграммы, имеющие одну отдельно
стоящую тривиальную компоненту.
Для множества свободных зацеплений из двух компонент, имеющих нечетное количество перекрестков между компонентами и одну ориентированную выделенную компоненту, мы построим
инвариант L 7→ {L}2 ∈ H.
Если обе компоненты зацепления L являются ориентированными и выполнено условие нечетности количества перекрестков между компонентами, то такому зацеплению, вообще говоря, будут
соответствовать два инварианта {L}2,L1 , {L}2,L2 в зависимости от выбранной ориентированной
компоненты.
Перейдем к построению инварианта {·}2 .
У двухкомпонентного зацепления L нечетными мы будем называть перекрестки, относящиеся
к обеим компонентам. Рассмотрим четные разведения для зацепления L. Каждое из них будет
представлять собой оснащенный 4-граф, задающий зацепление из не менее, чем двух компонент:
так как мы разводим лишь четные перекрестки, мы получим некоторый набор компонент, происходящий из компоненты L1 , и некоторый набор компонент, происходящий из L2 .
Мы выберем лишь те слагаемые, у которых количество компонент равно двум, при этом компоненту, соответствующую компоненте L1 , снабдим ориентацией.
Ориентация выбирается согласно следующему правилу. В каждой диаграмме Ls , получающейся
разведением всех четных перекрестков диаграммы L, в каждом нечетном перекрестке мы имеем
ориентацию компоненты (Ls )1 , соответствующую ориентации компоненты L1 в этом же перекрестке.
Количество таких перекрестков нечетно, и в каждом из них компонента L1 задает одну из двух
ориентаций для новообразованной компоненты (Ls )1 . Выберем в качестве ориентации для (Ls )1
ту из двух ориентаций, которая встречается нечетное число раз.
Формульно это выглядит следующим образом
∑
{L}2 =
((Ls )1,неч. ор. , (Ls )2 ) ∈ H.
sчетн,
2 комп
Имеет место
Теорема 5.14. Скобка {L}2 является инвариантом двухкомпонентных зацеплений с одной
фиксированной ориентированной компонентой и с нечетным количеством перекрестков между различными компонентами зацепления.
Доказательство. Повторим доказательство теоремы 5.9, обращая при этом внимание на ориентацию и соображение четности.
Во-первых, заметим, что «неориентированная» версия {L}2 инварианта {L}2 получается естественной проекцией инварианта {L} на линейное пространство оснащенных 4-графов, задающих
двухкомпонентные зацепления.
Таким образом, нам нужно лишь проследить за ориентациями компонент, возникающими в
разложении {L} при применении движений Рейдемейстера.
При первом движении Рейдемейстера проверка очевидна: перекресток, в нем участвующий,
сглаживается согласованным с ориентацией способом и не влияет на ориентацию.
5. Четность в теории узлов
L1
L1
L1
L1
65
L1
L1
L1
L1
L1
L1
L1
L1
L1
L1
a b
L1
L1
L1
L1
L1
L1
a’b’
РИС. 57. Поведение ориентаций при третьем движении Рейдемейстера
То же самое происходит и в случае второго движения Рейдемейстера с двумя четными перекрестками и третьего движения Рейдемейстера с тремя четными перекрестками: соответствующие
диаграммы до и после применения движения Рейдемейстера имеют одинаковый набор нечетных
перекрестков с одинаковой ориентацией компоненты L1 в каждом из них.
В случае второго увеличивающего движения Рейдемейстера L 7→ L′ , применяемого к двум
нечетным перекресткам, слагаемые в {L}2 и в {L′ }2 находятся в однозначном соответствии и
отличаются друг от друга вторым движением Рейдемейстера. Остается заметить, у каждого слагаемого из {L′ }2 оба новых перекрестка задают одну и ту же ориентацию для ориентированной
компоненты. Следовательно, от наличия этих перекрестков правило для определения ориентации
для ориентированной компоненты соответствующего слагаемого не меняется.
Рассмотрим теперь случай третьего движения Рейдемейстера, в котором участвуют две компоненты. Если из трех ветвей две относятся к неориентированной компоненте L2 , а одна — к
ориентированной компоненте L1 , то как на диаграмме L до применения движения, так и на диаграмме L′ (после применения движения), мы имеем два последовательных перекрестка на компоненте L1 , задающих одинаковую ориентацию. Следовательно, имеет место совпадение ориентаций
у соответствующих слагаемых в {L}2 в H.
Остается наиболее трудный случай, когда ориентированная компонента образует две ветви, а
неориентированная компонента образует одну ветвь, при этом единственный четный перекресток,
принимающий участие в третьем движении Рейдемейстера, лежит на самопересечении ориентированной компоненты.
Две версии этого движения изображены на рис. 57.
В верхней части рис. 57 видно, что слагаемые из первой пары в правой части и в левой части
имеют по два перекрестка каждое, причем ориентации компоненты L1 в этих перекрестках в обоих
случаях противоположны, следовательно, в целом соответствующие слагаемые задают один и тот
же элемент из H (с учетом второго движения Рейдемейстера).
66
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
L2
L1
РИС. 58. Пример необратимого свободного зацепления
Что касается второго слагаемого на верхнем рис. 57, то две точки пересечения (левая и правая)
компоненты L1 с компонентой L2 в левой части (левая и правая) задают те же самые ориентации, что и две точки пересечения в правой части, следовательно, и в этом случае правило для
определения ориентации компоненты из {L}2 в правой части и в левой части одно и то же.
На нижнем рисунке первое слагаемое в левой части имеет два перекрестка, ориентированных
одинаково, следовательно, их совместный вклад в определение ориентации компоненты L1 можно
не учитывать. То же самое происходит и в первом слагаемом в правой части.
На нижнем рисунке второе слагаемое в левой части имеет две точки пересечения a, b между
компонентами L1 , L2 , а второе слагаемое в правой части имеет две точки пересечения a′ , b′ между
соответствующими компонентами. Заметим, что ориентация компоненты L1 в точке a противоположна ориентации в точке a′ , а ориентация в точке b противоположна ориентации в точке b′ . Если
ориентации компоненты L1 в точках a и b в левой части согласованы, то согласованы и соответствующие ориентации в правой части. Если же ориентации в точках a и b различны, то как в
правой, так и в левой части мы имеем пару перекрестков, дающих обе возможные ориентации
для компоненты L1 . Суммируя сказанное, приходим к выводу, что во всех случаях ориентация
соответствующего слагаемого в {L}2 будет одна и та же.
Тем самым мы показали, что скобка {L}2 инвариантна относительно движений Рейдемейстера
как элемент из H.
Из определения следует
Утверждение 5.8. Если у диаграммы зацепления L = L1 ∪|L2 | все перекрестки принадлежат
обеим компонентам, и количество перекрестков нечетно, то {L1 ∪ |L2 |}2 = L1 ∪ |L2 | в H.
Доказательство теоремы 5.13. Пусть зацепление L удовлетворяет условиям этой теоремы. Предположим, что зацепление L эквивалентно зацеплению L1 ∪ L2 . Применяя скобку {·} к |L|, мы
видим, что движения Рейдемейстера не могут перевести зацепление |L| в себя, поменяв местами
компоненты L1 и L2 (свойство 5).
Далее, L1 ∪ |L2 | не эквивалентно как двухкомпонентное свободное зацепление с выделенной
ориентированной компонентой зацеплению L1 ∪ |L2 |. Переходя к {·}2 , мы видим, что L1 ∪ |L2 | ̸=
L1 ∪ |L2 | в H.
Поэтому зацепления L и L не эквивалентны: для согласованной нумерации компонент неэквивалентность следует из свойств нового инварианта {·}2 , а для несогласованной — из посылки
теоремы
Примером к теореме 5.13 служит свободное зацепление, изображенное на рис. 58. Все условия
теоремы 5.13 вытекают из явной проверки.
5. Четность в теории узлов
67
5.6. Скобка Голдмана и коскобка Тураева. Оказывается, что на множестве пар [двумерная
замкнутая ориентированная поверхность, кривая на этой поверхности] имеются интересные операции, инвариантные относительно движений Рейдемейстера. А именно, пусть S — фиксированная
двумерная поверхность (мы будем считать эту поверхность ориентированной, в противном случае
все рассуждения проходят с коэффициентами из Z2 ).
Все кривые мы будем считать погруженными посредством погружения общего положения. Такая
кривая представляет собой вложение оснащенного 4-графа. Две погруженные кривые в общем положении гомотопны, если и только если одна из них получается из другой композицией движений
Рейдемейстера (естественно, в случае, когда графы вложены в поверхность, движения Рейдемейстера учитывают структуру этой поверхности, в отличие от движений Рейдемейстера свободных
графов).
Пусть ΓS — множество всех линейных комбинаций гомотопических классов (при гомотопии
возможно нарушение гладкости и погружения в связи с первым движением Рейдемейстера) кривых
на фиксированной поверхности S с коэффициентами из основного поля F (поле предполагается
произвольным в случае ориентированной поверхности S или полем характеристики 2 в случае
неориентируемой S). Кривые предполагаются ориентированными.
Пусть, далее, Γ2S — множество F -линейных комбинаций гомотопических классов упорядоченных
пар ориентированных кривых на S, а Γ2S,0 — факторпространство пространства Γ2S по следующему
соотношению: K ⊔ ⃝ = 0, т.е. нулю полагаются равными все зацепления, имеющие диаграмму на
S, состоящую из двух связных компонент, одна из которых гомотопически тривиальна.
Перейдем к построению инвариантных отображений.
5.6.1. Отображение m : Γ2S → ΓS . Пусть γ1 , γ2 — пара ориентированных кривых, погруженных
в S в общем положении, и пусть X1 , . . . , XN — перекрестки из γ1 ∩ γ2 (в силу предположения
общности положения они суть трансверсальные и их конечное число). Пусть m(γ1 , γ2 )k — ориентированная кривая, полученная разведением γ1 ∪ γ2 в перекрестке Xk способом, согласованным с
ориентацией. Положим
∑
(5.3)
m(γ1 , γ2 ) =
signk (1, 2)m(γ1 , γ2 )k ∈ ΓS ,
k
где сумма берется по всем номерам перекрестков k = 1, . . . , N , а знак sign(1, 2) в перекрестке k обозначает знак перекрестка, т.е. равен единице, если базис, образованный касательными
векторами (γ̇1 , γ̇2 ), положителен, и минус единице иначе.
Эта сумма рассматривается как элемент из ΓS . Из непосредственной проверке вытекает
Теорема 5.15 (Голдман [64]). Отображение m : Γ2S → ΓS корректно определено, т.е., если
пара (γ1 , γ2 ) эквивалентна паре (γ1′ , γ2′ ), то m(γ1 , γ2 ) = m(γ1′ , γ2′ ).
Замечание 5.10. В случае оснащенных зацеплений операция (5.3) определена только над полем характеристики 2, так как знак signk (1, 2) можно определить только при наличии ориентированной поверхности S, которой нет в случае свободных зацеплений. Более того, не имея
поверхности, мы уже не можем определить отображение m для произвольной пары кривых, а
можем определить его лишь для двухкомпонентного свободного зацепления (не имея поверхности,
мы не имеем и точек пересечения кривых, заданных абстрактно).
5.6.2. Алгебра Ли Голдмана [64]. Отображение m можно трактовать несколько иначе. Имея
пару кривых γ1 , γ2 (фактически мы говорили о паре гомотопических классов кривых на S), мы
можем считать, что задано отображение
∑
[·, ·] : γ1 , γ2 7→ [γ1 , γ2 ] =
signk (1, 2)m(γ1 , γ2 )k ,
k
при этом при перемене мест γ1 и γ2 мы, естественно, придем к замене знака: [γ1 , γ2 ] = −[γ2 , γ1 ].
Легко проверяется также, что операция [·, ·] удовлетворяет тождеству Якоби: для любой тройки
ориентированных кривых γ1 , γ2 , γ3 имеем:
[[γ1 , γ2 ], γ3 ] + [[γ2 , γ3 ], γ1 ] + [[γ3 , γ1 ], γ2 ].
Таким образом, множество ΓS обладает структурой алгебры Ли.
68
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
5.6.3. Отображения ΓS → Γ2S,0 и ΓS → ΓS ⊗ ΓS / < . >. Коскобка Тураева [215]. Пусть γ — ориентированная кривая общего положения на ориентированной поверхности S, и пусть X1 , . . . , XN
— точки самопересечения кривой S. Тогда в результате разведения кривой γ в перекрестке Xi
способом, согласованным с ориентаций, мы получим две кривые, одну из которых γi,L естественно
называть левой, а другую (γi,R ) — правой. Следовательно, мы можем определить отображение
∑
γ 7→
(γi,L ⊗ γi,R − γi,R ⊗ γi,L ).
(5.4)
i
Это отображение является кососимметричным, но оно не вполне корректно определено: если мы
применим к кривой γ первое движение Рейдемейстера, увеличивающее количество перекрестков
на единицу, то в правой части равенства (5.4) возникнут дополнительные слагаемые вида γ0 ⊗ γ ′ −
γ ′ ⊗ γ0 , где γ0 — стягиваемая кривая, а γ ′ — кривая, гомотопная кривой γ.
Таким образом, для того, чтобы коскобка была корректно определена, нам нужно профакторизовать множество кривых по соотношению, согласно которому стягиваемая кривая равна нулю. Те же соображения позволяют построить инвариантное отображение (кривая →
линейная комбинация ориентированных пар кривых), не задающее структуры коалгебры, для этого достаточно рассмотреть отображение, заданное по формуле
∑
∆: γ →
γXs ∈ Γ2S,0 ,
s
где сумма рассматривается над Z2 , γXs означает пару кривых на поверхности S, полученных
разведением кривой γ в перекрестке XS , согласованным с ориентацией, а результат отображения
∆ рассматривается как элемент из Γ2S,0 .
Тем самым мы получили отображение ∆ : ΓS → Γ2S,0 , которое мы в дальнейшем будем называть
дельтой Тураева.
Пусть ΓF r — множество всех линейных комбинаций свободных узлов с коэффициентами из
Z2 , а Γ2F r,0 — множество Z2 -линейных комбинаций свободных зацеплений с двумя компонентами,
профакторизованное по следующему соотношению: K ⊔ ⃝ = 0, т.е. нулю полагаются равными
все свободные зацепления, имеющие диаграмму, состоящую из двух связных компонент, одна из
которых тривиальный свободный узел.
Аналогично определим отображение дельта Тураева из ΓF r в Γ2F r,0 : каждому оснащенному 4∑
графу K с одной уникурсальной компонентой мы сопоставим линейную комбинацию Ki (над Z2 )
i
оснащенных 4-графов с двумя уникурсальными компонентами каждый, полученных разведением
в соответствующих вершинах, при этом будем рассматривать полученную сумму как элемент из
Γ2F r,0 .
5.7. Применения дельты Тураева. В пункте 5.5.7 мы показали, как четность (в смысле пункта 5.1.2 или в смысле пункта 5.1.3) можно применять для доказательства минимальности диаграмм свободных узлов. Однако первый пример (минимальность нечетного несократимого узла)
был применим лишь к свободным узлам, гауссовы диаграммы которых имеют все нечетные хорды.
Использовался инвариант [·].
Далее был рассмотрен пример двухкомпонентного свободного зацепления, которому соответствуют ориентируемые атомы. Посредством инварианта {·}, примененного для четности из пункта 5.1.3, была доказана минимальность этой диаграммы L в сильном смысле: мы доказали, что
у каждого оснащенного 4-графа L′ , задающего то же зацепление, что и L, найдется разведение,
представляющее собой граф, изоморфный L как оснащенный 4-граф.
Теперь мы приведем пример свободного узла, которому соответствуют ориентируемые атомы,
про который можно доказать минимальность одной из диаграмм.
Утверждение 5.9. Диаграмма K1 свободного узла, изображенного на рис. 59, минимальна.
Ориентируемость атомов, соответствующих диаграмме K1 , легко проверяется прямым построением структуры источник–сток.
Доказательство утверждения 5.9. Рассмотрим ∆(K1 ) ∈ Γ2F r,0 .
5. Четность в теории узлов
3
x
69
4
5
6
8
2
7
1
РИС. 59. Минимальная гауссова диаграмма
x
РИС. 60. Пример необратимого свободного узла
По построению ∆(K1 ) состоит из девяти слагаемых (так как K1 имеет девять вершин), и каждое
из этих слагаемых является двухкомпонентным зацеплением. Эти слагаемые получаются разведениями диаграммы K1 в перекрестках. Одно из этих слагаемых (полученное разведением по хорде
x) представляет собой двухкомпонентное зацепление L1 , изображенное на рис. 56. Обозначим
остальные слагаемые через Mi , i = 1, . . . , 8.
Таким образом,
∑
∆(K1 ) = L1 +
Mi = L1
i
(в последнем равенстве мы использовали симметрию хордовой диаграммы относительно центра,
например, слагаемое M1 совпадает со слагаемым M3 и т.д.).
Рассматривая {∆(K1 )} и принимая во внимание инвариантность отображения {·}, мы получаем,
что любая диаграмма свободного узла K имеет по крайней мере одно разведение, представляющее
собой L1 как оснащенный 4-граф, т.е. любая диаграмма содержит по крайней мере 9 перекрестков.
5.7.1. Необратимость свободных узлов. Подобно тому, как нетривиальность свободных узлов
можно доказать исходя из нетривиальности свободных зацеплений, необратимость свободных
узлов можно вывести из необратимости свободных зацеплений. Для этого нужно лишь обратить
внимание на то, что операция ∆ Тураева согласована с ориентацией. Более того,
Теорема 5.16. Свободный узел K2 , изображенный на рис. 60, необратим.
∑
Доказательство. Легко убедиться, что ∆(K2 ) = L + Li , где L — свободное зацепление, изобi
раженное на рис. 58, а Li — свободные зацепления из двух компонент, у каждого из которых
имеется по крайней мере перекресток, образованный двумя ветвями одной и той же компоненты.
Действительно, у хордовой диаграммы, изображенной на рис. 60, имеется ровно одна хорда x,
зацепленная со всеми остальными хордами.
Отсюда легко следует, что {∆(K2 )}2 ̸= {∆(K 2 )}2 .
5.7.2. Четные и нечетные аналоги скобки Голдмана и коскобки Тураева. Пусть в некоторой
теории узлов K задана некоторая четность (мы будем в основном иметь дело с теорией свободных
узлов и четностью из пункта 5.1.2).
Рассмотрим множества ΓF r и Γ2F r,0 . Определим на них отображения ∆чет и ∆неч : ΓF r → Γ2F r,0 .
70
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Пусть K — оснащенный 4-граф с единственной уникурсальной компонентой. Положим
∑
∑
∆чет (K) =
Ks ,
∆неч (K) =
Ks .
Sчет
Sнеч
Здесь в первом случае берется сумма всех оснащенных 4-графов, получающихся разведением одной четной вершины графа K (сумма берется по всем четным вершинам) способом, согласованным
с ориентацией. Во втором случае сумма берется по всем нечетным вершинам, и также выбираются
разведения одной нечетной вершины графа K, согласованные с ориентацией.
При применении каждого из отображений ∆чет и ∆неч к конкретному оснащенному 4-графу
K мы получаем сумму, которую можно рассматривать как элемент из Γ2F r,0 .
Отметим, что выражение «способ, согласованный с ориентацией» осмысленно и для неориентированных оснащенных 4-графов: нам нужно выбрать тот способ разведения в вершине, который
приводит к двухкомпонентному оснащенному зацеплению. Из двух способов такой способ ровно
один, и он согласован с любой из двух ориентаций данного свободного узла.
Имеет место
Теорема 5.17. Отображения ∆чет и ∆неч корректно определены как отображения из ΓF r
в Γ2F r,0 .
Доказательство. Для доказательства заметим следующее. Если оснащенные 4-графы K и K ′
отличаются применением первого движения Рейдемейстера, то имеет место почленное равенство
∆неч (K) = ∆неч (K ′ ): количество нечетных перекрестков у K совпадает с количеством нечетных
перекрестков у K ′ , следовательно, имеет место взаимно однозначное соответствие между слагаемыми в разложениях ∆неч (K ′ ) и ∆неч (K). Соответствующие слагаемые получаются друг из
друга применением одного первого движения Рейдемейстера. В случае ∆чет в разложении у K ′
количество слагаемых на единицу больше, чем в разложении у K. Это «лишнее» слагаемое в K ′
представляет собой двухкомпонентное зацепление с одной отдельно стоящей тривиальной компонентой. Таким образом, это слагаемое тривиально в Γ2F r,0 . Все остальные слагаемые в ∆чет (K ′ )
находятся во взаимно однозначном соответствии со слагаемыми из ∆чет (K), при этом соответствующие слагаемые изоморфны как оснащенные 4-графы.
Пусть теперь K ′ получается из K применением второго движения Рейдемейстера, причем количество перекрестков у K ′ на два больше, чем количество перекрестков у K. Эти два «лишних» перекрестка имеют одинаковую четность. Если оба перекрестка нечетные, то в разложениях
∆чет (K) и ∆чет (K ′ ) количества слагаемых одинаковы, и все соответствующие слагаемые получаются друг из друга применением второго движения Рейдемейстера. Если оба перекрестка четные,
то в ∆чет (K ′ ) имеется на три слагаемых больше, чем в ∆чет (K), но два из этих трех слагаемых
тождественно совпадают, а одно имеет тривиальную окружность, поэтому все новые слагаемые
сокращаются в G̃. Все остальные слагаемые в ∆чет (K) находятся во взаимно однозначном соответствии со слагаемыми из ∆чет (K ′ ), при этом соответствующие слагаемые представляют собой
изоморфные оснащенные 4-графы.
Аналогично, если мы рассматриваем случай ∆неч , то в случае двух нечетных перекрестков мы
получим два «лишних» слагаемых в ∆неч (K ′ ) по сравнению с ∆неч (K); эти два новых слагаемых будут сокращаться; в случае двух четных перекрестков мы получим взаимно однозначное
соответствие между слагаемыми. Таким образом, ∆неч (K) = ∆неч (K ′ ).
Если K ′ получается из K третьим движением Рейдемейстера, то имеет место взаимно однозначное соответствие между перекрестками оснащенного 4-графа K и перекрестками оснащенного
4-графа K ′ . При этом четные перекрестки соответствуют четным, а нечетные — нечетным.
Если разводим диаграммы K и K ′ в перекрестке v (и соответствующем ему перекрестке, который мы также обозначим через v), при этом перекресток X не участвует в третьем движении
Рейдемейстера, то, очевидно, что соответствующие оснащенные двухкомпонентные свободные зацепления будут совпадать, так как представляющие их графы будут получаться друг из друга «тем
же самым» третьим движением Рейдемейстера, которое преобразует K в K ′ .
Если же этот перекресток v — один из трех, участвующих в третьем движении Рейдемейстера
то легко видеть, что разведение диаграммы K в перекрестке v либо совпадает с разведением
диаграммы K ′ в перекрестке v ′ (соответствующем v), либо отличается от него применением двух
5. Четность в теории узлов
71
вторых движений Рейдемейстера, одно из которых уменьшает количество перекрестков на два, а
второе — увеличивает количество перекрестков на два.
Аналогично «коумножающим отображениям» ∆чет , ∆неч строятся «умножающие отображения»
mчет , mнеч , при этом в качестве пространства, на котором эти отображения определены, можно рассматривать более широкое пространство, чем Γ2F r,0 : равенство нулю диаграмм, имеющих
отдельно стоящую тривиальную компоненту, не является более обязательным в случае «умножений».
Замечание 5.11. Было бы интересно рассмотреть комбинации операций ∆, ∆чет и ∆неч (при
надлежащих модификациях), взятых в разных порядках, и проанализировать, какие зацепления
(свободные зацепления) могут получиться из того или иного узла при рассмотрении на каждом
шаге той или иной четности.
Замечание 5.12. Для определения отображения ∆ нам не требуется структура проходов и
переходов в перекрестках (которая имеется в случае виртуальных узлов).
5.8. Аналог скобки Кауфмана. В настоящем разделе мы построим аналог скобки Кауфмана
⟨·⟩ для теорий узлов с четностью, который обобщает обычную скобку Кауфмана в случае классических узлов. Имеется много усилений скобки Кауфмана на случай виртуальных узлов, см.,
например статьи [25, 50, 51, 160, 173] и ссылки в них.
Мы явно выпишем все формулы в случае теории виртуальных узлов. Изложенное ниже обобщение скобки Кауфмана работает также и в других случаях, когда у каждого перекрестка имеется
естественный способ определения одного из разведений как разведения типа A, а другого разведения — как разведения типа B, при этом движения Рейдемейстера «в естественном смысле
согласованы с этими правилами». Отметим, что такие обобщения проходят, например, для теории
граф-зацеплений, см. пункты 7 и [77, 78, 80].
Рассмотрим свободный модуль F над кольцом Z[a, a−1 ], порожденный всеми оснащенными 4графами.
Пусть Fe — модуль, полученный факторизацией модуля F по двум соотношениям:
1. по второму движению Рейдемейстера,
2. по соотношению L ⊔ ⃝ = (−a2 − a−2 )L, где L означает произвольный оснащенный 4-граф, а
L ⊔ ⃝ — несвязную сумму графа L с отдельно стоящей окружностью.
Алгоритмическая распознаваемость элементов из Fe (наличие у них единственного минимального представителя) доказывается полностью аналогично случаю G̃.
Теория виртуальных узлов обладает гауссовой четностью (в смысле пункта 5.1.2); эта четность,
в свою очередь, удовлетворяет аксиомам 1, 2, 3 а), 3 б), 4, для каждой диаграммы узла в каждом
классическом перекрестке мы будем использовать тот факт, что имеются разведения различных
видов A и B (мы не будем выписывать аксиоматику, которой должны подчиняться разведения
типов A и B для перекрестков диаграмм, участвующих в движениях Рейдемейстера).
Построим теперь четную скобку Кауфмана, принимающую значение в модуле F, следующим
образом.
∑
⟨K⟩чет =
aα(s)−β(s) Ks ,
sчет
где α(s) (соотв., β(s)) — количество положительных
→
(соотв., отрицательных
→
) разведений в состоянии s, Ks — свободное зацепление, получающееся разведением узла K
e
согласно состоянию s, рассмотренное как элемент из F.
Замечание 5.13. Имеется естественное отображение Fe → G̃, получаемое факторизацией кольца коэффициентов: Z[a, a−1 ] → Z2 , где a 7→ 1, 2 7→ 0.
Таким образом, инвариант {·} будет представлять собой упрощение инварианта ⟨·⟩.
Теорема 5.18. Скобка ⟨·⟩чет является инвариантом узлов из теории K относительно движений Рейдемейстера Ω2 , Ω3 . При применении движения Ω1 значение ⟨·⟩ умножается на
72
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
(−a)±3 , при этом следующая нормировка для ⟨·⟩ инвариантна относительно всех трех движений Рейдемейстера:
Xчет (K) = (−a)−3w(K) ⟨K⟩чет ,
где w(K) обозначает число закрученности для ориентированной диаграммы K.
Назовем X(K) четным полиномом Джонса, ср. [85], для узла K.
Замечание 5.14. Четный полином Джонса является обобщением инварианта {·} для любой
теории узлов с четностью и правилом A и B разведений перекрестков. Переход осуществляется
посредством отображения Z[a, a−1 ] → Z2 : a 7→ 1, 2 7→ 0.
Кроме того, для четности в смысле пункта 5.1.2 полином Xчет (K) является обобщением обычного полинома Джонса для классических узлов и для узлов, диаграммы которых имеют ориентируемые атомы. В этом случае в определении скобки ⟨·⟩чет все элементы Ks представляют собой
тривиальные зацепления, которые в модуле Fe являются кратными тривиального узла с коэффициентами, равными соответствующим степеням полинома (−a2 − a−2 ). Считая образующую модуля
F, порожденную тривиальным узлом, единицей, мы получаем стандартный полином Джонса.
Доказательство теоремы 5.18. Это доказательство полностью аналогично доказательству инвариантности скобки {·}. Пусть K ′ получается из K применением одного из трех движений Рейдемейстера.
При движении Ω1 имеем (в F):
⟨
⟩чет = a⟨
⟩чет + a−1 ⟨
= (a + a−1 (−a2 − a−2 ))⟨
⟩чет =
⟩чет = (−a−3 )⟨
⟩чет .
Аналогично для другого случая первого движения Рейдемейстера имеем:
⟨
⟩чет = (−a3 )⟨
⟩чет .
При применении второго движения Рейдемейстера нужно различать два случая. Если оба перекрестка, принимающих участие во втором движении Рейдемейстера, являются нечетными, то
имеется взаимно однозначное соответствие между перекрестками диаграмм K и K ′ , из которого
вытекает взаимно однозначное соответствие между слагаемыми в ⟨K⟩чет и ⟨K ′ ⟩чет . При этом
соответствующие слагаемые получаются друг из друга применением второго движения Рейдемейe
стера и, следовательно, представляют собой одинаковые элементы из F.
В случае двух четных перекрестков, принимающих участие во втором движении Рейдемейстера, проходит стандартное доказательство инвариантности для обычной скобки Кауфмана относительно второго движения Рейдемейстера. Как и в стандартной скобке Кауфмана, три слагаемых
сокращаются в Fe за счет коэффициентов a2 , a−2 и (−a2 − a−2 ).
В случае третьего движения Рейдемейстера нужно различать случаи, когда количество четных перекрестков, участвующих в третьем движении, равно единице, и когда количество четных
перекрестков, участвующих в движении, равно трем.
Если количество четных перекрестков в диаграмме K (или K ′ ), участвующих в третьем движении Рейдемейстера, равно единице, то после разведения диаграмм K и K ′ в соответствующих
перекрестках v и v ′ мы получим суммы
⟨K⟩чет = a⟨K⟩чет,+ + a−1 ⟨K⟩чет,− ; ⟨K ′ ⟩чет = a⟨K ′ ⟩чет,+ + a−1 ⟨K ′ ⟩чет,− ;
где индексы плюс и минус отвечают за положительные (отрицательные) разведения в перекрестках
v и v ′ . Легко видеть, что соответствующие слагаемые для K и K ′ в одном из разведений (+
или −) совпадают, а в другом — отличаются применением второго движения Рейдемейстера к
e
соответствующим графам, т.е. равны в F.
В случае, когда все три перекрестка диаграммы K, участвующих в третьем движении Рейдемейстера K → K ′ , являются четными, доказательство дословно повторяет доказательство инвариантности скобки Кауфмана относительно третьего движения Рейдемейстера в случае классических и
виртуальных узлов.
6. Кобордизмы свободных узлов
6.
КОБОРДИЗМЫ
73
СВОБОДНЫХ УЗЛОВ
6.1. Введение. Кривая, погруженная в поверхность, допускает естественное понятие нулькобордантности или срезанности: говорят, что погруженная кривая γ ⊂ Sg в ориентированную
замкнутую двумерную поверхность Sg рода g является нуль-кобордантной (или срезанной), если
найдется такое ориентированное 3-многообразие M, ∂M = Sg , и такой диск D, гладко отображенный в M отображением f , что f (∂D) = f (D) ∩ ∂M = γ.
Аналогично, будем говорить, что погруженная кривая γ ⊂ Sg имеет срезанный род, равный h,
если в приведенном выше определении вместо диска D рассматривается ориентированная поверхность рода h с одной компонентой края.
Первые препятствия к срезанности для кривых были найдены С. Картером, [29]; затем эта
проблема изучалась В. Г. Тураевым, [211], К. Орром и другими.
Замечание 6.1. В дальнейшем мы будем иметь дело лишь с погружениями общего положения
кривых в двумерные поверхности, если не оговорено противное. Под общим положением для
кривой понимается, что все ее особенности состоят из конечного числа точек самопересечения,
при этом каждая точка самопересечения является двойной и трансверсальной.
Можно легко показать, что если две кривые гомотопны, и одна из них является срезанной, то и
другая кривая является срезанной. Таким образом, уместно говорить о классах срезанности для
гомотопических классов кривых. Кроме того, если кривая γ в поверхности Sg+1 не имеет общих
точек с меридианом некоторой ручки, то можно считать, что эта же кривая γ лежит в поверхности
Sg , полученной из Sg+1 разрезанием вдоль полученной кривой (меридиана) и заклеиванием получившихся компонент края дисками. Очевидно, что пары (Sg , γ) и (Sg+1 , γ) одновременно являются
либо срезанными, либо нет.
Следовательно, имеет смысл говорить о классах срезанности плоских виртуальных узлов [213],
которые представляют собой классы эквивалентности пар (окружность, погруженная в ориентированную 2-поверхность, и сама поверхность) с точностью до изотопий кривых по поверхности и
стабилизаций/дестабилизаций.
В работе [160] (полную версию см. в [149]) было положено начало всестороннему изучению
свободных узлов. Для свободных узлов можно естественным образом определить понятие срезанности (см. ниже) таким образом, чтобы, если плоский узел срезан, то и соответствующий ему
свободный узел тоже оказался бы срезанным.
В настоящем разделе понятие четности будет обобщено с одномерных объектов (кривые с самопересечениями) на двумерные (диски с самопересечениями), что позволит строить инварианты
срезанности свободных узлов. Эта проблема (о существовании не срезанных свободных узлов)
стала актуальной после построения первых примеров нетривиальных свободных узлов. Точные
определения срезанных свободных узлов и срезанного рода для свободных узлов см. далее, определение 6.7.
Препятствия к срезанности (и инварианты кобордизмов) для плоских виртуальных узлов, построенные Картером, Орром и Тураевым не могут быть прямо перенесены на случай свободных
узлов, так как эти инварианты несут в себе гомологическую информацию о поверхности, в то
время как свободные узлы не относятся ни к какой поверхности. В некотором смысле, четность
способна заменить гомологии в то время когда у рассматриваемого объекта нет «настоящих» гомологий, см. п. 5.2.
Понятие четности имеет и другие приложения в теории кобордизмов свободных узлов и погруженных кривых. В частности, если свободный узел, задаваемый оснащенным 4-графом Γ, является
срезанным, то срезанным является и свободный узел, задаваемый графом Γ′ , полученным из графа
Γ «удалением нечетных перекрестков», см. теорему 6.9 далее.
Целью настоящего раздела является построение одного простого (на самом деле — целочисленного) инварианта свободных узлов, который доставляет препятствие к срезанности (нулькобордантности) свободных узлов.
74
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
В работе [79] было введено родственное понятию кобордизма отношение эквивалентности, названное комбинаторным кобордизмом: вместо топологического определения, использующего понятие затягивающего диска, мы имели дело с формальным комбинаторным определением, следуя работе Тураева [211]. Согласно этому определению, два свободных узла являются (комбинаторно) кобордантными, если один может быть продеформирован в другой посредством конечной
цепочки движений из заданного списка. Эти движения включают в себя все движения Рейдемейстера, и каждое из них отвечает настоящему (топологическому) кобордизму.
Раздел организован следующим образом. Сначала мы рассмотрим понятие комбинаторно кобордантных свободных узлов. Мы построим инвариант и пример, показывающий, что свободные узлы
нетривиальны более в широком смысле.
Далее мы строим инвариант для топологической кобордантности узлов. Мы доказываем его
инвариантность относительно движений Рейдемейстера. После этого для доказательства того, что
он правильно себя ведет при кобордизмах мы обобщаем понятие четности со свободных узлов на
затягивающие их диски. Мы рассматриваем двойные линии на диске и определяем, какие двойные
линии являются «четными», а какие «нечетными». Мы используем гомологический подхода к
определению четности двойной линии, согласованный с гомологическим определением четности
перекрестков свободного узла.
После этого дается введение в теорию Морса для кобордизмов погруженных кривых и приводится набросок доказательства основной теоремы. Рассматривая функцию Морса на затягивающем
диске и имея правильное гомологическое определение четности для двойных линий, мы можем
продолжить определение инварианта на каждую поверхность уровня функции Морса. После этого
простые рассуждения из теории Морса и естественная «аддитивность» инварианта при разбиениях приводят к противоречию нетривиальности инварианта. Ключевым рассуждением является
перенос понятия четности с точек самопересечения кривой на двойные линии поверхности.
6.2. Комбинаторный кобордизм свободных узлов. Пусть D — произвольная хордовая диаграмма.
Определение 6.1. Назовем четной симметричной конфигурацией C на хордовой диаграмме
D набор попарно непересекающихся дуг Ci на окружности хордовой диаграммы, обладающий
следующими свойствами:
1. концы дуг не совпадают с концами хорд, и внутри каждой дуги имеется четное число концов
хорд;
2. каждая хорда, имеющая один конец в C, имеет другой конец также в C;
3. рассмотрим инволюцию i окружности, переводящую все точки вне дуг Ci в себя и отражающую точки дуги относительно радиуса, соединяющего центр окружности с серединой
этой дуги. Соединяя хордой образы тех двух точек, которые были соединены хордой на первоначальной хордовой диаграмме, мы получим хордовую диаграмму i(D). Требуется, чтобы
конфигурация C была симметрична, т.e. хордовые диаграммы D и i(D) были эквивалентны.
Определение 6.2. Назовем элементарным кобордизмом преобразование хордовой диаграммы,
состоящее в удалении всех хорд, входящих в четную симметричную конфигурацию, а также
преобразование, обратное к данному. Скажем, что две хордовые диаграммы свободного узла кобордантны, если они получаются друг из друга последовательным применением элементарных
кобордизмов и третьих преобразований Рейдемейстера.
Замечание 6.2. Четность хорд не меняется при элементарных кобордизмах.
Данное определение соответствует определению кобордизма слов (нанослов) [211], т.к. имеется
естественное отображение из классов кобордизмов (нано)слов в классы кобордизмов свободных
узлов.
Первое и второе преобразования Рейдемейстера представляют собой частные случаи элементарных кобордизмов, а третье — нет. Поэтому имеет смысл говорить о кобордизмах свободных
узлов.
Главным результатом настоящего пункта является доказательство существования свободных
узлов, не кобордантных нулю. Для решения этой задачи мы построим инвариант кобордизмов
свободных узлов.
6. Кобордизмы свободных узлов
75
Пусть L — оснащенный 4-граф. Каждая его уникурсальная компонента Li задается своей хордовой диаграммой Di . Таким образом, некоторые из вершин графа L представляются хордами
одной из диаграмм Di (а именно те вершины, которые лежат на одной уникурсальной компоненте). Выберем из числа этих вершин четные (в смысле хордовой диаграммы Di ), и в каждой
из четных вершин v графа L рассмотрим то из двух его разведений Lv , у которого количество
уникурсальных компонент на единицу больше, чем у графа L.
Пусть R — множество Z2 -линейных комбинаций классов эквивалентности оснащенных 4-графов
по второму и третьему преобразованиям Рейдемейстера. Положим
∑
∆(L) =
Lv ∈ R,
v
где сумма берется по четным перекресткам v.
Замечание 6.3. Мы используем то же самое обозначение ∆ как и для дельты Тураева, поскольку эти две операции, в некотором смысле, похожи. В дельте Тураева каждой кривой сопоставляется линейная комбинация упорядоченных пар кривых, а здесь каждому оснащенному 4-графу с
k уникурсальными компонентами — линейная комбинация классов эквивалентности оснащенных
4-графов с k + 1 уникурсальными компонентами.
Утверждение 6.1. Отображение ∆ является корректно определенным отображением из R
в R.
Доказательство. В самом деле, предположим, что граф L получается из графа L′ посредством
третьего движения Рейдемейстера. Рассмотрим три вершины a1 , a2 , a3 в графе L, которые участвуют в этом движении, и соответствующие вершины a′1 , a′2 , a′3 графа L′ . По построению вершина
ai лежит на одной уникурсальной компоненте графа L, если и только если вершина a′i лежит на
одной уникурсальной компоненте графа L′ . Кроме того, вершина ai является четной, если и только
если вершина a′i является четной. Легко видеть, что всякий раз когда вершина ai является четной,
разведение Lai дает тот же самый вклад в R, что и разведение L′a′ (соответствующие оснащенные
i
4-графы либо изоморфны, либо отличаются вторым движением Рейдемейстера).
Далее, пусть графы L и L′ отличаются вторым движением Рейдемейстера, и пусть граф L′
имеет на две вершины a, b больше, чем граф L. Если две вершины a, b нечетны, то слагаемые в
∆(L) находятся во взаимно однозначном соответствии со слагаемыми в ∆(L′ ), и соответствующие
диаграммы отличаются вторым движением Рейдемейстера. Если же две вершины a, b четны, то
очевидно, что разведения в этих двух вершинах дают одинаковый вклад для L′ , и, так как мы
работаем над Z2 , эти слагаемые уничтожатся.
Следовательно, для любого k ∈ N корректно определенным является и отображение ∆k , итерация k раз отображения ∆. Поэтому если L и L′ — два оснащенных 4-графа, получающиеся друг
из друга вторыми и третьими преобразованиями Рейдемейстера, то для любого k ∈ N имеет место
∆k (L′ ) = ∆k (L).
Пусть L — оснащенный 4-граф, имеющий k уникурсальных компонент. Сопоставим диаграмме L
граф Γ(L) и число j(L) согласно следующему правилу. Граф Γ(L) имеет k вершин, находящихся в
однозначном соответствии с уникурсальными компонентами оснащенного 4-графа L. Две вершины
соединены ребром тогда и только тогда, когда соответствующие компоненты имеют нечетное число
общих точек. Очевидно следующее
Утверждение 6.2. Если два оснащенных 4-графа L и L′ эквивалентны, то графы Γ(L), Γ(L′ )
изоморфны.
Определим число j(L) по графу Γ(L) следующим образом. Если граф Γ(L) несвязен, положим
j(L) = 0. В противном случае j(L) положим равным числу ребер графа Γ(L).
Фиксируем натуральное число n. Пусть N — линейное пространство, порожденное над Z2
векторами {ai , i ∈ N}. Для оснащенного 4-графа L положим J (L) = aj(L) при j(L) > 0 и J (L) = 0
при j(L) = 0. Продолжим это отображение на Z2 –линейные комбинации оснащенных 4-графов по
линейности.
Положим, далее, I(n) (L) = J (∆n (L)).
76
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Теорема 6.1. Если L и L′ кобордантны, то I(n) (L) = I(n) (L′ ).
Доказательство этой теоремы опирается на два утверждения, первое из которых очевидно,
а второе, утверждение 6.3, является центральным. В силу утверждения 6.2 отображение I(n) (·)
инвариантно относительно третьего преобразования Рейдемейстера (ибо таковым является даже
отображение ∆n ). Кроме того, имеет место
Утверждение 6.3. Если оснащенные 4-графы L1 и L2 элементарно кобордантны, то
I(n) (L1 ) = I(n) (L2 ).
Доказав утверждение 6.3, мы докажем и теорему 6.1.
Набросок доказательства утверждения 6.3. Вместо оснащенных 4-графов мы будем рассматривать гауссовы диаграммы.
Пусть D2 — это гауссова диаграмма, полученная из гауссовой диаграммы D1 , удалением четной
симметричной конфигурации C.
Хорды диаграммы D1 можно разделить на три множества:
1. множество тех хорд, которые соответствуют хордам диаграммы D2 ; мы обозначим их в обеих
диаграммах D1 и D2 через γj ;
2. множество тех хорд βj , которые остаются неподвижными при инволюции i на C;
3. множество пар хорд αk и ᾱk = i(αk ), которые получаются друг из друга инволюцией i (здесь
¯ k = αk ).
ᾱ
Напомним, что для каждой хордовой диаграммы D выражение ∆n (D) — это сумма некоторых
последовательных разведений ∆(p1 ...pk ) (D) вдоль хорд p1 , . . . , pk , где каждая хорда pi является
хордой диаграммы D и четной после разведения вдоль всех хорд p1 , . . . , pi−1 .
∆n (D1 ) распадается на три типа слагаемых:
1. те слагаемые, для которых все хорды pi совпадают с хордами γj . Эти разведения находятся
во взаимно однозначном соответствии с разведениями диаграммы D2 . Мы утверждаем, что
соответствующие элементы в I(∆(p1 ...pk ) (D1 )) и в I(∆(p1 ...pk ) (D2 )) совпадают;
2. те слагаемые, в которых хотя бы одна хорда из хорд pi является хордой βj , и ни одна из хорд
pi не является ни хордой α, ни хордой ᾱ. Мы утверждаем, что каждое из таких слагаемых в
I(∆(p1 ...pk ) (D1 )) равно нулю;
3. те слагаемые, в которых хотя бы одна хорда из хорд pi является либо хордой αj , либо хордой
ᾱj . Эти слагаемые разбиваются на пары: элементы I(∆(p1 ...pk ) (D1 )) и I(∆(p̄1 ...p̄k ) (D1 )) равны.
Рассмотрим сначала первый случай. Так как дуги нашей симметричной конфигурации не имеют
общих точек с хордами γj , то легко видеть, что после разведения вдоль любой хорды γj каждая
дуга будет полностью принадлежать какой-либо одной окружности. Это означает, что соответствующие графы Γ(∆(p1 ...pk ) (D1 )) и Γ(∆(p1 ...pk ) (D2 )) изоморфны.
В самом деле, хорды βj не влияют на граф Γ(∆(p1 ...pk ) (D1 )) вообще, так как они всегда лежат
на одной уникурсальной компоненте. Хорды αi и ᾱi принадлежат либо одной уникурсальной
компоненте, либо одной и той же паре уникурсальных компонент. Следовательно, либо они вообще
не участвуют, либо их вклады в построение графа Γ(∆(p1 ...pk ) (D1 )) аннулируют друг друга.
Докажем второй пункт. Возьмем одну хорду pj = βk и рассмотрим дугу Ci на диаграмме D1 , где
находится βk . Без ограничения общности, можно считать, что хорда βk самая внутренняя хорда
на Ci среди всех тех хорд βl , вдоль которых мы разводим.
Наше слагаемое выглядит как ∆(...βk ... ) . Разведение соответствующей диаграммы (которая получается в результате разведения вдоль хорд, находящихся до хорды βk ) вдоль хорды βk разрезает уникурсальную компоненту, которая содержит дугу Ci . Очевидно, что эта уникурсальная
компонента расщепится в смысле графа Γ, т.е. даст одну новую вершину, причем эта вершина соответствует уникурсальной компоненте, которая имеет общие хорды с другими уникурсальными
компонентами только типов α и ᾱ. Так как мы вдоль таких хорд не разводим, то эта универсальная компонента всегда будет иметь четное число хорд с каждой универсальной компонентой, т.е.
граф будет несвязным.
Третий пункт доказывается с помощью теоремы 4.1. А именно, с помощью теоремы 4.1 мы
всегда можем понять, принадлежат ли концы одной хорды двум разным окружностям или одной,
6. Кобордизмы свободных узлов
77
РИС. 61. Хордовая диаграмма свободного узла, не кобордантного тривиальному
и соединяют ли две хорды, концы каждой из которых лежат на разных окружностях, одни и те
же окружности или разные.
Пример 6.1. Рассмотрим свободный узел K, хордовая диаграмма которого изображена на
рис. 61. Для этого узла мы получаем
(
)
∆
=
+
+
,
)
(
)
(
)
(
)
(
2
=∆
+∆
+∆
=
∆
=
+
(
)
∆3
+∆
+
= ∆
=
+
+
+
+ ∆
+
=
+ ∆
+
+
+
,
+ ∆
+ ∆
+
+
=
+
=
.
Таким образом I(3) (K) = a4 . По теореме 6.1 класс кобордизма свободного узла K нетривиален.
6.3. Инвариант свободных узлов. В настоящем разделе мы построим новый инвариант свободных узлов, пользуясь исключительно четностью и уточненной четностью и докажем его инвариантность при движениях Рейдемейстера. Далее мы докажем, что этот инвариант доставляет
препятствие к срезанности для свободного узла. В настоящем разделе под четностью и уточненной четностью мы будем понимать гауссову четность и гауссову уточненную четность.
Обобщение инварианта, который мы приводим в настоящем разделе, было построено в работе [127]; для наших целей (построения препятствия к срезанности) нам достаточно будет той
(слабой) версии инварианта, которая приведена ниже. Тем не менее, вопрос об использовании инварианта, построенного [127] (в [127] была доказана его инвариантность относительно движений
Рейдемейстера для свободных узлов) в качестве препятствия к срезанности, является важным.
Для построения инварианта нам потребуется ввести понятие уточненной четности, аналогичное понятие четности.
78
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Определение 6.3. Уточненной четностью перекрестка мы называем четность вместе с дополнительным правилом, сопоставляющим каждому нечетному перекрестку либо букву b, либо букву
b′ (в этих случаях мы говорим, что перекресток является нечетным первого типа или нечетным
второго типа соответственно), таким образом, что:
1. если второе движение Рейдемейстера применяется к двум нечетным перекресткам, то эти
два перекрестка имеют один и тот же тип (либо оба помечены как b, либо оба помечены как
b′ );
2. если в третьем движении Рейдемейстера мы имеем два нечетных перекрестка, то при применении движения каждый из них меняет свой тип (b превращается в b′ , а b′ — в b);
3. кроме того, при каждом из движений Рейдемейстера нечетные перекрестки, не принимающие
участия в движении, своего типа не меняют.
Мы определим гауссову уточненную четность на оснащенных 4-графах с единственной уникурсальной компонентой следующим образом.
Определение 6.4 (Гауссова уточненная четность). Пусть D — хордовая диаграмма, на которой
задана гауссова четность, т.е. хорда диаграммы D является четной, если количество хорд, зацепленных с ней, четно, и нечетной в противном случае. Далее скажем, что нечетная хорда имеет
первый тип (по Гауссу), если она зацеплена с четным числом четных хорд; в противном случае
скажем, что нечетная хорда имеет второй тип (по Гауссу).
Для оснащенного 4-графа Γ, соответствующего хордовой диаграмме D, гауссова четность и
гауссова уточненная четность для вершин определяются как гауссова четность и гауссова уточненная четность соответствующих хорд хордовой диаграммы.
Можно легко проверить, что гауссова четность и уточненная гауссова четность удовлетворяют
аксиомам четности и уточненной четности.
Определение 6.5. Сечение кобордизма, т.е. затягивающего диска, называется сингулярным,
если оно содержит критическую точку, которая не является ни морсовской особенностью, ни
Рейдемейстеровской особенностью. В противном случае, сечение называется регулярным.
Далее для построения инварианта кобордизмов мы определим понятия гауссовой четности и
гауссовой обобщенной четности в других ситуациях. Сначала для двумерного диска с самопересечениями мы определим гауссову четность и уточненную четность для фрагментов двойных
линий (линий самопересечения) этого диска, а затем для каждого регулярного сечения диска,
которое представляет собой оснащенный 4-граф (быть может, с многими уникурсальными компонентами), определим четность и уточненную четность как четность и уточненную четность,
индуцированные с двойных кривых.
Однако для нашей первой цели (построения инварианта свободных узлов) нам будет достаточно иметь корректно определенную четность для оснащенных 4-графов с одной уникурсальной
компонентой.
Рассмотрим группу G = ⟨a, b, b′ | a2 = b2 = b′2 = e, ab = b′ a⟩ с единицей e. Для слова γ в
алфавите из a, b, b′ мы будем обозначать через [γ] соответствующий слову γ элемент группы G.
Мы сначала построим инвариант свободных длинных узлов (соответственно, свободных узлов)
со значениями в G (соответственно, со значениями во множестве классов сопряженности группы
G).
Пусть D — ориентированная хордовая диаграмма с отмеченной точкой X на окружности C,
отличной от концов хорд. Далее мы увидим, что для наших целей от ориентации хордовой диаграммы D можно будет избавиться.
Будем различать четные и нечетные хорды диаграммы D; более того, среди нечетных хорд
диаграммы D мы будем делать различие между хордами первого и второго типов.
Паре (D, X), где D — ориентированная хордовая диаграмма с отмеченной точкой X на окружности хордовой диаграммы, мы сопоставим слово в алфавите из трех букв {a, b, b′ } следующим
образом. Будем двигаться вдоль ориентации окружности хордовой диаграммы C, начиная с точки
X. Каждый раз, когда мы проходим через конец хорды, мы будем записывать букву a, b или b′ в
зависимости от того, является хорда четной, нечетной первого типа или нечетной второго типа.
6. Кобордизмы свободных узлов
79
Таким образом, каждой хорде будут соответствовать две одинаковые буквы в разных местах слова. Пройдя всю окружность до точки X, мы получим слово γ(D, X); это слово задает некоторый
элемент из G; мы будем обозначать его также через γ(D, X). Более того, иногда в обозначении
мы будем опускать нижний индекс X, если из контекста ясно, о какой начальной точке идет речь.
Теорема 6.2. Если две пары (D, X) и (D′ , X ′ ) порождают эквивалентные свободные узлы,
то имеет место [γ(D, X)] = [γ(D′ , X ′ )] в G.
Доказательство. Действительно, пусть сначала D и D′ отличаются одним первым движением
Рейдемейстера (скажем, D′ имеет на одну хорду больше). Тогда слово γ(D′ ) получается из слова
γ(D) добавлением пары подряд идущих букв — образующих a·a; таким образом, соответствующие
элементы группы G совпадают.
Аналогично, если D′ получается из D посредством увеличивающего второго движения Рейдемейстера, то две новые хорды в D′ имеют одинаковую четность (и, если обе нечетные, то и
одинаковый тип), следовательно, этим хордам соответствует одна и та же буква–образующая (a,
b или b′ ), которую мы обозначим через u. Таким образом, слово γ(D′ ) получается из слова γ(D)
добавлением подслова u · u в двух местах. Как и в случае первого движения Рейдемейстера, такое
преобразование не меняет элемента из G.
Третье движение Рейдемейстера D → D′ может иметь один из двух видов. В первом случае все
три участвующие в этом движении хорды являются четными.
Тогда слова γ(D) и γ(D′ ) тождественно совпадают.
Во втором случае две из трех хорд, участвующих в движении Рейдемейстера, являются нечетными, а одна хорда — четная. Вспомним, что при третьем движении Рейдемейстера каждая из
нечетных хорд, в нем участвующих, меняет свой тип.
Рассмотрим те три отрезка в словах γ(D) и γ(D′ ), на которых расположены концы «подвижных» хорд. Для тех из двух отрезков, которые содержат концы нечетных хорд, преобразование
подслов-отрезков имеет один из следующих видов ab ←→ b′ a или ba ←→ ab′ . Оба соотношения
представляют собой тождества в группе G.
Рассмотрим теперь тот отрезок, на котором расположены два конца нечетных хорд. Если эти
два конца имеют один и тот же тип на диаграмме D, то на диаграмме D′ они также будут иметь
один и тот же тип. Таким образом, при переходе от γ(D) к γ(D′ ) мы заменяем подслово b·b на b′ ·b′
и наоборот. Так как оба подслова соответствуют тривиальному элементу групп G, мы получаем
γ(D) = γ(D′ ) в G.
Наконец, если две нечетные хорды, участвующие в третьем движении Рейдемейстера, имеют
различный тип на диаграмме D, то они будут иметь различный тип и на диаграмме D′ , и при
переходе от γ(D) к γ(D′ ) соответствующий отрезок из двух букв меняться не будет: буквы b, b′ на
этом отрезке поменяют порядок дважды: один раз в связи с тем, что хорды меняют тип, а другой
раз — в связи с тем, что концы хорд переставляются при третьем движении Рейдемейстера.
Таким образом, каждое из движений Рейдемейстера оставляет неизменным элемент группы G,
соответствующий ориентированной хордовой диаграмме с отмеченной точкой.
Из этой теоремы мгновенно вытекает
Следствие 6.1. Класс сопряженности элемента [γ(D, X)] в группе G является инвариантом
свободных узлов, т.е. не зависит от выбора отмеченной точки X на диаграмме D свободного
узла.
Действительно, при перемещении отмеченной точки через конец некоторой хорды мы производим циклическую перестановку букв в слове, которая порождает сопряжение в группе G.
6.3.1. Граф Кэли для группы G. Граф Кэли группы G представляет собой вертикальную полосу
на клетчатой бумаге, расположенную между прямыми x = 0 и x = 1. В качестве единицы группы
мы выбираем начало координат (0, 0). Умножение в группе на элемент a справа соответствует
одному шагу в горизонтальном направлении, который меняет координату x с нуля на единицу или
с единицы на нуль, умножение на b соответствует одному шагу по вертикали: вверх, если сумма
двух координат точки является четной, и вниз, если она является нечетной; умножение справа на
b′ , наоборот, соответствует одному шагу вниз, если сумма координат четная и одному шагу вверх,
если сумма координат нечетная, см. рис. 62.
80
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
a
b'
b
a
b
(0,0)
b'
a
b'
b
a
b'
b
a
РИС. 62. Граф Кэли группы G
РИС. 63. Несрезанный свободный узел
Каждой паре (D, X) мы сопоставляем элемент группы G. Нетрудно проверяется, что каждый
такой элемент будет иметь координаты (0, 4m). Более того, класс сопряженности элемента с координатами (0, 4m) при m ̸= 0 состоит из двух элементов группы G: одного элемента с координатами
(0, 4m) и одного элемента с координатами (0, −4m). Таким образом, для длинных свободных узлов
мы получаем инвариант с целыми значениями, равный l = 4m; мы будем обозначать этот инвариант для узла K через l(K); в случае компактного узла K инвариантом будет являться модуль |l|;
последний инвариант мы обозначим через L(K).
Очевидно, что если мы обратим ориентацию хордовой диаграммы (обращая тем самым ориентацию свободного узла), это приведет к обращению порядка букв в соответствующем слове γ, что
в свою очередь, приведет к замене (0, 4m) → (0, −4m). Это приводит к двум важным следствиям:
Следствие 6.2. Если для некоторого ориентированного свободного узла K имеет место
l(K) ̸= 0, то узел K необратим.
Следствие 6.3. L(K) является инвариантом неориентированных свободных узлов.
Далее мы будем задавать элементы группы G их координатами на графе Кэли. Легко проверяется, что элемент группы G соответствующий хордовой диаграмме, имеет координаты (0, 4m) для
некоторого целого m. Действительно, слово, соответствующее гауссовой диаграмме, имеет четное
число вхождений буквы a, откуда следует равенство нулю первой координаты. Кроме того, общее
число вхождений букв b и b′ кратно четырем. Последнее, в свою очередь, следует из того факта,
что число нечетных хорд на хордовой диаграмме четно, а каждая хорда имеет два конца, которые
соответствуют шагам в одну и ту же сторону на графе Кэли. Кроме того, класс сопряженности (в
группе G) элемента (0, 4m) при m ̸= 0 состоит из двух элементов: (0, 4m) и (0, −4m).
На рис. 63 изображен свободный узел K1 , для которого имеет место L(K1 ) = 16.
6. Кобордизмы свободных узлов
81
На этом рисунке мы используем полужирные линии для изображения четных хорд. Соответствующее слово, задающее элемент из G (при подходящем выборе отмеченной точки) будет иметь
вид (b′ a)7 b′ b(ab)7 = (b′ b)16 .
6.3.2. Замечания об определении инварианта L для зацеплений. Заметим, что теорема 6.2
верна для любой уточненной четности, а не только для гауссовой, при этом доказательство в
случае произвольной уточненной четности остается дословно тем же.
Для целей, связанных с кобордизмами, нам необходимо научиться понимать значение инварианта L не только при движениях Рейдемейстера, но и при перестройках Морса. Здесь мы будем
использовать только гауссову уточненную четность.
Более того, нам нужно сначала определить этот инвариант для зацеплений из многих компонент, ибо после перестройки Морса из узла может получиться зацепление.
Наша дальнейшая стратегия состоит в следующем. Предположим, что у нас имеется кобордизм
(см. определение 6.7) D → D, затягивающий оснащенный 4-граф Γ; мы определим четность
и уточненную четность для этого кобордизма, т.е. скажем, какие двойные линии (линии на
D, точки на которых имеют два прообраза на D) являются четными, а какие — нечетными, а
далее каждая нечетная двойная линия будет разделена на отрезки — нечетные первого типа и
нечетные второго типа. Эта четность будет определена таким образом, что четность (уточненная
четность) любой двойной точки на Γ будет совпадать с четностью (уточненной четностью) того
1-страта, к которому принадлежит эта точка. Кроме того, этот подход позволит нам определить
понятия четности и уточненной четности для сечений общего положения нашего кобордизма. Такие сечения будут представлять собой оснащенный 4-граф, задающий некоторое свободное
зацепление. Имея корректно определенные четность и уточненную четность, мы сможем задать
значение инварианта L на каждой компоненте зацепления — нашего сечения. Как окажется, значения этих инвариантов (наборы чисел) будут хорошо себя вести при перестройках Морса, из чего
и будет следовать инвариантность.
Для свободного зацепления из одной компоненты (т.е. свободного узла) значение инварианта γ
может быть описано одним числом L. В случае кобордизма каждое сечение представляет собой
многокомпонентное свободное зацепление, таким образом, нам нужно определить значение инварианта γ на соответствующем многокомпонентном зацеплении как набор классов сопряженности
группы G (по одному на каждую компоненту), и естественно будет потребовать, чтобы каждый
из этих элементов группы G (или соответствующий класс сопряженности) мог быть описан одним
целым (соотв., целым неотрицательным) числом. В этому случае мы сможем каждой компоненте
зацепления, появляющейся в сечении нашего кобордизма, сопоставить целое (целое неотрицательное) число.
Для этих целей нам потребуется, чтобы:
1) Четность и уточненная четность были корректно определенными на сечениях и правильно
себя вели при перестройках Морса.
2) Число точек пересечения каждой из уникурсальных компонент сечения с каждой из двойных
линий является четным; более того, число точек пересечения этой уникурсальной компоненты
сечения с нечетными двойными линиями является четным; это условие необходимо для того,
чтобы элемент группы G, соответствующий этой уникурсальной компоненте, имел в своей записи
четное число букв a и мог быть описан одной координатой на графе Кэли.
3) Значение первой координаты элемента группы G (которое в этом случае задает элемент L)
правильно себя ведет при перестройках Морса.
Четность общего числа точек пересечения с двойными линиями для каждой компоненты зацепления — несингулярного сечения — нужно и для того, чтобы четность была корректно определенной. Действительно, для определения гауссовой четности некоторого перекрестка нам нужно
рассмотреть одну из двух «половинок» нашего свободного узла, получающихся разведением в этом
перекрестке, и подсчитать количество пересечений на этой половине. В случае свободного узла
это число не зависит от выбора половинки, так как суммарное количество точек пересечения четно
с учетом кратности: каждая двойная точка учитывается дважды.
В случае двухкомпонентного зацепления если мы берем перекресток, образованный двумя ветвями одной и той же компоненты, то определенные таким образом четности двух половин могут
82
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
быть различными в случае, если общее число перекрестков между двумя компонентами является
нечетным.
Как мы далее увидим, все необходимые условия для естественного продолжения гауссовой четности будут естественным образом выполняться для тех многокомопонентных зацеплений, которые
возникают в виде сечений дискового кобордизма.
Чтобы это сделать, нам понадобится дать более топологическое определение понятия гауссовой
четности.
6.4.
Срезанный род и кобордизмы свободных узлов.
Определение 6.6. Пусть K — оснащенный 4-граф с одной уникурсальной компонентой. Скажем, что K имеет срезанный род не более g если найдутся поверхность Dg рода g с единственной
компонентой края (окружностью) S, 2-комплекс Dg ⊃ K, содержащий K как подкомплекс, и
непрерывное отображение ν : Dg → Dg такие, что:
1. ν(∂Dg ) = K ⊂ Dg ; для любой вершины v графа K имеет место ν −1 (v) = {v1 , v2 }, а малая
окрестность U (vi ) ⊂ S отображается на пару противоположных ребер графа K в вершине v;
2. отображение ν является взаимно однозначным везде за исключением следующих отрезков:
Σ = {x ∈ Dg | card(ν −1 (x)) > 1};
3. подмножество Σ3 = {x ∈ Dg | card(ν −1 (x)) > 2} является конечным подмножеством нульмерного остова комплекса Dg и состоит из тех точек, которые имеют ровно три прообраза; более
того, Σ3 ∩ ∂Dg = ∅;
4. «локальная трехмерность»: в комплексе Dg окрестности двойных точек, тройных точек и
каспов имеют следующий вид:
(a) окрестность каспа (точки, в которой отображение не является иммерсией) гомеоморфна
зонтику Уитни;
(b) окрестность двойной точки из Σ \ Σ3 , не являющейся каспом, гомеоморфна окрестности
точки (0, 0, 0) в множестве {(x, y, z) | xy = 0} ⊂ R3 ;
(c) окрестность тройной точки гомеоморфна окрестности точки (0, 0, 0) в множестве
{(x, y, z) | xyz = 0} ⊂ R3 ;
(d) окрестность вершины графа K в Dg гомеоморфна окрестности точки (0, 0, 0) в множестве
{(x, y, z) | xy = 0, z > 0} ⊂ R3 .
Поверхность Dg мы назовем затягивающей поверхностью рода g или кобордизмом рода g для
K.
Иными словами, в определении мы требуем, чтобы свободный узел (оснащенный 4-граф K,
представленный в виде образа окружности S) был затянут 2-комплексом Dg — образом двумерной
поверхности Dg , край которой представляет собой одну окружность S, а особенности отображения
ν : Dg → Dg являются особенностями общего положения (т.е. окрестность каждой особенности
вложима в R3 ).
Аналогичным образом определяется срезанный род для оснащенного 4-графа с многими уникурсальными компонентами, кобордизм рода g для свободных зацеплений (при этом у затягивающей
поверхности будет несколько компонент края), а также отношение эквивалентности ∼: два свободных узла K1 и K2 являются кобордантными, если свободное зацепление K1 ⊔ K2 кобордантно
тривиальному узлу (посредством кобордизма рода 0).
Замечание 6.4. Далее под словом «кобордизм» мы всегда будем понимать кобордизм рода нуль,
если не оговорено противное.
Замыкание Σ кроме точек из Σ содержит также каспы, т.е. такие точки x ∈ Dg , для которых
card(ν −1 (x)) = 1, и при этом для любой малой окрестности U (x) точки x пересечение U (x) ∩ Σ
представляет собой проколотый интервал. Пусть Σ2 обозначает дополнение Σ \ Σ3 .
Пересечение ν(S) ∩ Dg представляет собой исходный оснащенный 4-граф в Dg . Этот граф получается из S = ∂Dg посредством склейки двойных точек на окружности S; оснащение (структура
противоположных ребер) для этого графа получается из S: для точки x в ν(S) ∩ Σ прообраз
ν −1 (U (x) ∩ ν(S)) состоит из двух ветвей окружности S; образ каждой из этих ветвей относительно отображения ν будет представлять собой две пары противоположных ребер.
6. Кобордизмы свободных узлов
83
РИС. 64. Кобордизмы, соответствующие движениям Рейдемейстера
РИС. 65. Несрезанный плоский виртуальный узел Картера
Определение 6.7. Если K допускает кобордизм рода g и не допускает кобордизма рода g − 1,
мы скажем, что узел (оснащенный 4-граф) K имеет срезанный род g. Обозначение: sg(K) = g.
Свободный узел срезанного рода 0 мы назовем нуль-кобордантным или срезанным.
Следующая лемма вытекает из определения свободного узла:
Лемма 6.1. Если оснащенные 4-графы K, K ′ представляют эквивалентные свободные узлы, то K и K ′ являются кобордантными, и, следовательно, sg(K) = sg(K ′ ).
Действительно, на рис. 64 изображено, что эквивалентность посредством каждого из трех движений Рейдемейстера влечет кобордантность; так как кобордантность является отношением эквивалентности, мы получаем требуемое. Первое движение Рейдемейстера соответствует прохождению через точку каспа, второе движение Рейдемейстера соответствует прохождению через точку
касания, а третье движение Рейдемейстера соответствует прохождению через тройную точку.
Таким образом, имеет смысл говорить о срезанном роде для свободных узлов, а не только для
оснащенных 4-графов.
Замечание 6.5. Пусть K — плоский виртуальный узел, и пусть |K| — соответствующий ему
свободный узел. Тогда из определения следует, что срезанный род узла K не меньше срезанного
рода узла |K|. В частности, если плоский узел K является срезанным, то срезанным является и
свободный узел |K|.
Пример 6.2. Первый простейший пример несрезанного виртуального узла принадлежит
Дж. С. Картеру, [29]. Этот узел изображен на рис. 65.
Этот узел вложим в ориентируемую поверхность рода два. Ориентируем эту поверхность. На
рис. 65 стрелки указывают взаимное расположение ветвей по часовой стрелке. А именно, ориентируем окружность хордовой диаграммы против часовой стрелки и ориентируем ее образ соответствующим образом. Если два сегмента кривой (a, b) имеют пересечение в двойной точке X,
84
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
а касательные векторы к ним vX,a , vX,b образуют положительный базис на поверхности с двумя
ручками, то соответствующая хорда на хордовой диаграмме снабжена стрелкой, направленной от
прообраза отрезка a к прообразу отрезка b.
При таких обозначениях для плоских виртуальных узлов если две хорды участвуют во втором уменьшающем движении Рейдемейстера, то их стрелки должны быть противонаправленными.
Плоский виртуальный узел K, изображенный на рис. 65, нетривиален, более того, он не является
и срезанным. Тем не менее в категории свободных узлов узел |K| тривиален, так как к двум «параллельным» хордам возможно применить второе уменьшающее движение Рейдемейстера (после
чего оставшаяся хорда удаляется первым движением Рейдемейстера). Значит, |K| тривиален и,
следовательно, срезан.
Если свободный узел не является срезанным, то не является срезанным ни один из соответствующих ему виртуальных узлов.
Проблема нахождения не кобордантных нулю (не срезанных) свободных узлов является довольно сложной.
В п. 6.2 мы ввели понятие комбинаторной эквивалентности. Наши комбинаторные преобразования состояли из третьего движения Рейдемейстера и добавления/удаления «четных симметричных
конфигураций». Преобразования последнего вида включают в себя в качестве частных случаев
первое и второе движение Рейдемейстера, и каждое из них представляет собой некоторый (топологический) кобордизм рода нуль. Таким образом, если два узла являются комбинаторно кобордантными, то они являются и топологически кобордантными. Взаимосвязь между топологическим
и комбинаторным отношениями кобордантности будет рассмотрена в отдельной статье.
В работах Картера [29] и В. Г. Тураева [211] были изучены топологические препятствия к срезанности свободных узлов (погруженных в двумерные поверхности кривых). Идея таких препятствий состоит в следующем: для погруженной кривой Γ рассматриваются гомологические классы
«половинок» Γx,1 и их гомологические спаривания. Эти спаривания образуют целочисленную матрицу, препятствие к кобордизмам формулируется в терминах свойств полученной матрицы. Такой
подход совершенно неприемлем в случае свободных узлов: для данного свободного узла можно
найти много разных двумерных поверхностей, в которые он вложим с сохранением структуры
противоположных полуребер в вершинах. Оказывается, что при переходе от одной поверхности к
другой соответствующий индекс пересечения, если он определен, меняется даже по модулю Z2 .
В качестве примера можно взять стандартную диаграмму трилистника и диаграмму трилистника
после применения виртуализации к одной из его вершин (эта диаграмма находится на торе).
6.5. Четность для кривых в двумерных поверхностях. Обратим теперь внимание на структуру кобордизма свободных узлов. Пусть задан кобордизм ν : D → D (рода 0) затягивающий
свободный узел (оснащенный 4-граф) K = ν(∂D).
Положим Ψ = ν −1 (Σ). Тогда Ψ имеет естественную стратификацию на страты размерностей 0
и 1. Страты размерности 0 суть двойные точки на крае, каспы, а также тройные точки; все
остальные точки образуют страты размерности 1. Двойной линией мы будем обозначать минимальное по включению объединение 1-стратов, обладающее следующими свойствами:
1) два 1-страта, подходящие к одному и тому же каспу с противоположных сторон, принадлежат
одной и той же двойной линии;
2) два 1-страта, подходящие к одной и той же тройной точке с противоположных сторон,
принадлежат одной и той же двойной линии, см. рис. 66.
Пусть x ∈ K ∩ Σ — двойная точка на крае ∂D. Предположим, что ν −1 (x) = {x1 , x2 }.
Вспомним определение гауссовой четности для оснащенных 4-графов. Рассмотрим двойную
точку x, рассмотрим дугу (половину окружности) ι на K, соединяющую x с x и являющуюся
образом дуги ι̃ на окружности, и подсчитаем четность числа двойных точек на ι. Заметим, что
здесь мы берем именно половину окружности, не важно которую, а не просто кривую на K,
соединяющую точку x с точкой x. Дело в том, что если мы возьмем кривую на окружности
∂D, соединяющую два прообраза x1 и x2 точки x, но локально (в окрестности этих прообразов)
направленную внутрь разных «половинок», то количество двойных точек на такой кривой будет
на единицу больше, ибо добавится один из прообразов точки x.
6. Кобордизмы свободных узлов
a y
x
85
c
a
x
b x
z
y
z
z
x
b
y
y
c
z
t
t
t
РИС. 66. Двойные линии a, x, y, z, каспы и тройные точки
Рассмотрим теперь прообраз ι̃ ⊂ S, соединяющий точки x1 и x2 . Тогда определение четности
p(x) может быть переформулировано как четность количества элементов множества card(ι̃ ∩ Σ).
Заметим, что эта линия ι̃ принадлежит диску D.
Если мы хотим обобщить определение четности на двойные линии и сделать его более топологическим, мы можем вместо ι̃ ⊂ ∂D рассмотреть произвольный путь η̃ ⊂ D общего положения,
соединяющий x1 с x2 . Общность положения означает, что путь пересекает Σ только по Σ2 , причем
все пересечения трансверсальные. Кроме того, нам нужно переформулировать условие правильной
направленности пути в окрестности начала и конца (см. далее). Сделав это, мы мгновенно получаем корректную определенность четности, ибо любые два таких пути гомотопны относительно
границы, и четность числа точек пересечения с множеством Σ останется неизменной.
Требование на поведение кривой в окрестности точек x1 и x2 таково. Когда мы берем η̃ ⊂ D,
окрестности η̃ ∩ U (x1 ) и η̃ ∩ U (x2 ) точек x1 и x2 принадлежат одной и той же половине окружности
S (окружность делится на половины этими точками). В терминах D и D это переформулируется
следующим образом.
Пусть ζ ⊂ D — 1-страт в D, подходящий к точке x или содержащей ее. Ориентируем ζ произвольным образом и ориентируем два прообраза этого страта, ζ1 ∩U (x1 ) и ζ2 ∩U (x2 ), согласованным
образом. Рассмотрим два вектора v1 и v2 , касательные к η̃ в x1 и в x2 соответственно. Мы требуем, чтобы базисы (ζ̇1 , v1 ) и (ζ̇2 , v2 ) задавали две различные ориентации на D. Ясно, что замена
ориентации страта ζ (и соответствующая ей одновременная замена ориентаций в окрестностях
точек x1 и x2 ) не изменит определенной здесь четности числа η̃ ∩ Σ2 .
Таким образом, это дает нам новый способ определения четности перекрестка x. Будем рассматривать этот способ как определение четности для любой двойной точки из Σ2 .
Действительно, пусть x — точка на двойной линии из Σ2 . Подсчитав число точек пересечения
кривой, соединяющей x1 и x2 указанным выше способом, мы получим число p(x). Назовем его
гауссовой четностью точки x.
Следующее утверждение легко вытекает из определения.
Утверждение 6.4. Гауссова четность постоянна вдоль двойных линий.
Доказательство. Утверждение очевидно для пар точек, которые принадлежат одному 1-страту.
Это утверждение также очевидно для точек из разных 1-стратов, подходящих с двух сторон
86
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
x2
x
.
x1
ζ2
x 2 v2
.
ζ1
x
x1 v
1
РИС. 67. Геометрический способ определения четности
A1δ
γ
p
B1
γ qε
A2
B2
δ
γ
δ A ε
B
ε
РИС. 68. Поведение четности и уточненной четности при прохождении через тройную точку
к одному каспу. При прохождении через тройную точку четность не меняется по следующим
причинам, см. рис. 68. Мы видим, что кривая, соединяющая два прообраза точки A, «параллельна»
кривой, соединяющей два прообраза точки B везде, за исключением двух малых областей. Внутри
этих двух малых областей мы имеем два различия между этими циклами, которые соответствуют
точкам пересечения p и q с двойными линиями. Таким образом, четность точек A и B одна и та
же.
Это позволяет дать определение гауссовой четности для двойной линии:
Определение 6.8. Пусть γ — двойная линия на кобордизме. Выберем произвольную точку x
из γ ∩ Σ2 и рассмотрим два ее прообраза x1 и x2 на D. Соединим x1 с x2 путем общего положения
η̃, поведение которого в окрестностях U (x1 ) и U (x2 ) согласовано (см. выше). Тогда гауссова
четность двойной линии, содержащей x, определяется как четность числа точек пересечения
между η̃ и Ψ.
Это позволяет нам определить множество Ψeven , состоящее из замыкания множества всех точек
из Ψ, лежащих на четных двойных линиях, и Ψodd — замыкание множества точек на нечетных
двойных линиях.
6. Кобордизмы свободных узлов
87
Из определения гауссовой четности для двойных линий легко вытекает следующее
Утверждение 6.5. Из трех двойных линий, пересекающихся в одной точке, количество
нечетных двойных линий четно (равно нулю или двум).
Перейдем теперь к определению уточненной гауссовой четности. Рассмотрим нечетную двойную линию γ, выберем на ней произвольную точку x общего положения и рассмотрим два прообраза x1 и x2 точки x. Соединим точки x1 и x2 путем общего положения δ ∈ D и вычислим
количество точек общего положения между δ и Ψeven . Если это число является четным, скажем,
что 1-страт, содержащий точку x, имеет первый тип; в противном случае скажем, что он имеет
второй тип.
Заметим, что здесь не нужно требовать какой-либо согласованности (сонаправленности) начального и конечного отрезков пути: при малом шевелении пути в окрестности его начала (конца)
может измениться лишь количество точек его пересечения с нечетными двойными линиями, в то
время как мы интересуемся пересечением с четными двойными линиями.
Из определения вытекает
Утверждение 6.6. Уточненная гауссова четность является постоянной вдоль 1-стратов,
принадлежащих Ψ. Она не меняется при прохождении через точку каспа (с одного страта на
другой страт той же двойной линии), и она изменяется с b на b′ или с b′ на b при прохождении
через тройную точку с одного страта двойной линии на другой.
Доказательство. Утверждение о постоянности типа вдоль 1-стратов очевидно. Рассмотрим теперь рис. 68. Предположим, что двойные линии γ и δ нечетные, а двойная линия ϵ четная. Две
соответствующие точкам A и B линии (линия, соединяющая два прообраза точки A и линия,
соединяющая два прообраза точки B) могут быть выбраны «параллельными» везде, за исключением двух областей, содержащих точки p и q. Так как при определении типа нечетной двойной
линии мы учитываем пересечения с четными двойными линиями, мы видим, что точка q считается, а точка p не считается. Случай, когда все три линии являются нечетными, рассматривается
аналогично. Тем самым доказано, что тип меняется на единицу при прохождении через тройную
точку.
Определив гауссову четность для двойных линий и уточненную гауссову четность для
стратов, мы можем теперь построить инвариант L для любого сечения кобордизма D.
Доказанные выше свойства четности на двойных линиях и уточненной четности на стратах
гарантируют корректную определенность этого инварианта и его неизменность при движениях
Рейдемейстера.
6.6. Срезанность свободных узлов. Оказывается, что инвариант L свободных узлов доставляет
препятствие к срезанности.
Перед формулировкой и доказательством основной теоремы сделаем несколько утверждений, относящихся к срезанности. Согласно лемме 6.1, срезанный род корректно определен для свободных
узлов.
Следующее утверждение тривиально следует из рис. 64.
Утверждение 6.7. Если оснащенный 4-граф K ′ эквивалентен оснащенному 4-графу K (посредством движений Рейдемейстера), то срезанный род узла K ′ равен срезанному роду узла
K. В частности, если K является срезанным, то таковым является и K ′ .
Таким образом, имеет смысл говорить о кобордизмах свободных узлов, а не только о кобордизмах оснащенных 4-графов.
В качестве следствия мы получаем следующее
Утверждение 6.8. Если оснащенный 4-граф K вложим в S 2 или T 2 , то K является срезанным.
Действительно, всякий оснащенный 4-граф на сфере эквивалентен (даже как плоский виртуальный узел) тривиальному свободному узлу; всякий оснащенный 4-граф на торе гомотопен либо
тривиальному узлу (без перекрестков), либо некоторому узлу, лежащему в цилиндре (дополнению в торе до некоторой простой несжимаемой кривой). В последнем случае этот свободный
88
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
узел эквивалентен узлу, лежащему на сфере (ибо цилиндр является подмногообразием сферы) и,
следовательно, тривиален.
Утверждение 6.9. Пусть K — свободный узел, и пусть f (K) — свободный узел, полученный
из K удалением нечетных перекрестков. Тогда если узел K является срезанным, то срезанным
является и f (K).
Доказательство. Действительно, всякий кобордизм (рода нуль) для узла K порождает кобордизм
рода нуль для узла f (K) полученный разведением всех нечетных двойных линий: две точки из
Σ2 , склеиваемые при старом кобордизме, останутся склеенными при новом кобордизме тогда и
только тогда, когда у старого кобордизма двойная линия является четной. Отметим, что это
правило склейки согласовано с тройными точками, ибо в каждой тройной точке если имеется две
четные двойные линии, то третья двойная линия также является четной.
Обозначим полученный кобордизм для f (K) через f (D), где D — кобордизм для K.
Основной результат данного раздела состоит в следующем.
Теорема 6.3. Если для свободного узла K имеет место L(K) ̸= 0, то K не является срезанным.
Из этой теоремы, в частности, вытекает
Следствие 6.4. Пусть γ — кривая, погруженная в ориентированную замкнутую двумерную
поверхность Sg . Тогда если для свободного узла Γ, задаваемого кривой γ, имеет место L(Γ) ̸=
0, то плоский виртуальный узел, соответствующий кривой γ, не является срезанным.
Действительно, диск, гладко отображенный в трехмерное многообразие является затягивающим
диском. Обратное утверждение, вообще говоря, неверно.
Проблема нахождения препятствий к тому, чтобы кривая γ в поверхности Sg была затягиваема
диском, собственным образом погруженным в трехмерное многообразие M с краем Sg , изучалась
Картером, [29], Тураевым [211] и др. Были построены некоторые топологические препятствия,
основанные на структуре первой группы гомологий поверхности Sg .
В настоящем разделе мы рассматриваем более сложную проблему: вместо кривых в двумерных
поверхностях мы рассматриваем оснащенные 4-графы, а вместо затягивающих дисков в трехмерных многообразиях — «абстрактные» затягивающие диски. В этом случае мы не можем определить
«группу гомологий», ибо оснащенный 4-граф можно считать вложенным в разные поверхности, у
которых будут разные группы гомологий.
С этой точки зрения четность в некотором смысле «заменяет» группы гомологий.
6.6.1. Построение функции Морса и графа Риба. Доказательство основной теоремы будет состоять из нескольких шагов.
Сначала мы примем следующее соглашение об обозначениях: через ν мы будем обозначать
отображение D → D, соответствующее кобордизму, а через µ мы будем обозначать как функцию
Морса на диске с самопересечениями µ : D → R (см. определение ниже), так и композиционное
отображение µ ◦ ν : D → R, представляющее собой функцию Морса на диске D.
Предположим, что свободный узел K (задаваемый оснащенным 4-графом) допускает кобордизм
ν : D → D (рода 0).
Определение 6.9. Функцией Морса на D мы назовем такую функцию Морса µ : D → [0, ∞),
что: ν(x) = ν(y) всегда влечет µ(x) = µ(y), все тройные точки и точки каспов на D лежат на
некритических уровнях функции µ и µ−1 (0) = K, µ−1 (1) = ∅. Мы будем использовать одно и то
же обозначения µ как для функции, определенной на D, так и для функции, определенной на D.
Неособым значением функции µ мы будем обозначать некритическое значение X функции µ
(на D) такое, что множество µ−1 (X) ⊂ D не содержит каспов и тройных точек. Функцию Морса
на D мы будем называть простой, если каждый ее особый уровень содержит либо ровно одну
критическую точку, либо ровно одну тройную точку, либо ровно один касп.
Далее мы будем считать, что функция Морса на D является простой, а уровень 0 является
неособым. Ясно, что такие функции Морса всюду плотны в классе всех функций Морса. Каждая
6. Кобордизмы свободных узлов
89
0.98
1
0.97
0.9
f
0.3
0.2
0.1
0.08 0.07
0.05 0.01
0
РИС. 69. Граф Риба и перестройки окружностей
функция Морса имеет особые уровни двух типов: соответствующие перестройкам Морса (седла,
максимумы и минимумы), а также уровни, соответствующие движениям Рейдемейстера. Обозначим особые уровни этой функции Морса µ (обоих типов) через c1 < · · · < ck и выберем неособые
уровни ai : 0 = a0 < c1 < a1 < c2 < . . . ak < ck < ak+1 = 1.
Построим теперь граф Риба Γµ (молекулу) для функции Морса µ следующим образом. Все
вершины этого графа будут иметь валентность 1 или 3. Вершины валентности один (кроме одной)
будут соответствовать минимумам и максимумам функции µ; вершины валентности три будут
соответствовать седловым точкам (заметим, что каждое седло состоит в перестройке либо одной окружности в две, либо двух в одну, ибо поверхность — диск — является ориентируемой);
каждое ребро графа Риба будет соответствовать цилиндру S 1 × I ⊂ D, который непрерывно отображается функцией µ на это ребро (отрезок) между двумя вершинами (критическими точками);
этот цилиндр не содержит морсовских критических точек внутри (хотя, быть может, содержит
особые точки, соответствующие перестройкам Рейдемейстера). Одна вершина валентности один
будет соответствовать уровню 0 (некритическому), на котором находится окружность S = ∂D, см.
рис. 69.
Так как этот граф представляет собой граф Риба функции Морса на диске D, граф Γµ представляет собой дерево.
Теперь мы сопоставим каждому ребру графа Риба неотрицательную целочисленную метку.
Метка на ребре, исходящем из нулевого уровня функции Морса, будет совпадать с L(K).
Для каждого неособого уровня c функции µ прообраз Kc = µ−1 (c) ⊂ D представляет собой
оснащенный 4-граф, задающий свободное зацепление; при прохождении через особую точку «Рейдемейстера» этот граф подвергается соответствующему движению Рейдемейстера; при прохождении через морсовскую особую точку граф претерпевает перестройку Морса. Каждый перекресток
графа Kc принадлежит некоторой двойной линии. Определим четность перекрестка как гауссову четность соответствующей двойной линии. Аналогичным образом мы определим уточненную
четность перекрестка как уточненную четность того 1-страта, которому он принадлежит.
Можно легко заметить, что если сечение функции Морса представляет собой свободный узел
(является оснащенным 4-графом с единственной уникурсальной компонентой), то четность и уточненная четность на этой компоненте совпадают с гауссовыми четностью и уточненной четностью,
определяемыми стандартным образом посредством гауссовых диаграмм.
Выберем неособый уровень c, рассмотрим свободное зацепление Kc и ориентируем его компоненты произвольным образом (как мы далее увидим, выбор ориентации будет несуществен);
каждая уникурсальная компонента Kc,j свободного зацепления Kc задает класс сопряженности
δ(Kc,j ) элемента γ(Kc,j ) в группе G таким же образом, как и свободный узел. Пусть δ(Kc ) —
неупорядоченный набор всех классов δ(Kc,j ) для всех j (с повторениями).
Из утверждений 6.4 и 6.6 мы получаем следующую лемму.
90
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Лемма 6.2. Четность и уточненная четность, определенные на множестве всех не особых
уровней Kc , удовлетворяют всем аксиомам четности и уточненной четности при тех движениях Рейдемейстера, которые возникают при переходе от одного особого уровня к другому
внутри кобордизма D.
Таким образом, мы получаем следующую лемму
Лемма 6.3. При изменении параметра c вдоль отрезка [a, b] ⊂ [0, 1], на котором с уровнем
Kc происходят лишь перестройки Рейдемейстера, но не перестройки Морса, причем уровни,
соответствующие значениям a и b, не содержат перестроек Рейдемейстера, мы имеем совпадение неупорядоченных множеств с повторениями δ(Ka ) = δ(Kb ), если ориентации компонент
зацеплений Ka и Kb согласованы: эти множества представляют собой классы сопряженности
элементов из G.
Более того, δ(K0 ) представляет собой класс сопряженности элемента γ(K).
Доказательство проходит так же, как доказательство теоремы 6.2.
Теперь мы хотели бы рассмотреть δ как набор неотрицательных целых чисел с повторениями,
а также забыть об ориентациях компонент зацеплений Kc . Для этого нам потребуется следующая
Лемма 6.4. Пусть c — неособый уровень функции µ, и пусть Kc,1 , . . . , Kc,n — уникурсальные компоненты свободного зацепления Kc = µ−1 (c) ⊂ D. Тогда для каждого i = 1, . . . , n
выполняются следующие условия:
1. Общее число точек пересечения между Kc,i и Kc,j , j ̸= i, является четным.
2. Число нечетных точек пересечения между Kc,i и Kc,j , j ̸= i, (т.е. точек пересечения,
лежащих на нечетных двойных линиях) является четным.
Доказательство. Доказательство вытекает из того факта, что прообраз оснащенного 4-графа
Kc,i в диске D представляет собой окружность, а число точек пересечения замкнутой кривой
с множеством Ψ (или с множеством Ψeven ) в D в общем положении состоит из четного числа
точек.
Лемма 6.4 мгновенно влечет, что γ(Kc,i ) для неособого значения c задает элемент с координатами (0, 2k) на графе Кэли группы G (для некоторого целого k).
Пусть Lc = {lc,1 , . . . , lc,m } — неупорядоченный набор целых чисел с повторениями, полученный
из δ(K, c) заменой классов сопряженности элементов из G на абсолютные значения их второй
координаты. Так как обращение ориентации заменяет координаты элемента группы G с (0, 2k) на
(0, −2k), то при смене ориентации неупорядоченный набор модулей чисел (о котором говорится в
лемме 6.4), соответствующих компонентам зацепления, не меняется.
Каждое число lc,i ∈ N ∪ {0} отвечает некоторой компоненте свободного зацепления Kc и не
меняется при движениях Рейдемейстера при изменении c (при условии, что c не проходит через
морсовские особые точки). Сопоставим это число ребру графа Γµ .
Проанализируем теперь поведение этих меток lc,i в вершинах графа Γµ .
Лемма 6.5. Пусть Kc−ε и Kc+ε отличаются одной морсовской перестройкой на уровне c.
Тогда:
1. Если перестройка соответствует появлению окружности, то множество Lc+ε получается из множества Lc−ε добавлением одного элемента 0.
2. В случае исчезновения окружности множество Lc+ε получается из множества Lc−ε удалением одного нуля.
3. В случае, когда две окружности сливаются в одну, множество Lc+ε получается из множества Lc−ε применением следующей операции: все элементы, кроме двух (равных m
и n), остаются неизменными, а вместо двух элементов появляется один элемент равный некоторому k = ±n ± m.
4. Операция разбиения одной окружности на две обратна операции слияния двух окружностей в одну: при этой операции один элемент k преобразуется в два элемента m, n
такие, что ±m ± n = k, а остальные элементы остаются неизменными.
7. Граф-зацепления
91
2
3
1
+
1
2
+
1
+
3
3
2
РИС. 70. Правый трилистник и его гауссова диаграмма
2
+
1
1
2
+
1
2
РИС. 71. Виртуальный трилистник и его гауссова диаграмма
Доказательство. Первые два утверждения очевидны: на тривиальной окружности нет двойных
точек, таким образом, соответствующий ей элемент из G равен единице, а его координаты равны
(0, 0), и соответствующая метка нулевая.
Последние два утверждения вытекают из следующего соображения. Если окружность C с отмеченной точкой X разбивается на две окружности посредством перестройки Морса, которая
происходит в окрестности точки X и окрестности некоторой другой точки Y на окружности, то
соответствующее слово w ∈ G разбивается в произведение двух слов w = wXY wY X .
Оставшаяся часть доказательства вытекает из правил умножения в группе G: для элементов
u, v ∈ G, имеющих координаты (u1 , u2 ) и (v1 , v2 ) соответственно, произведение u · v имеет координаты (±u1 ± v1 , ±u2 ± v2 ).
Доказанная лемма следующим образом приводит к доказательству теоремы 6.3. Все вершины
графа Γµ валентности 1, кроме одной (соответствующей исходному узлу K), имеют метку 0. В
каждой вершине валентности три сумма трех меток со знаками ± равна нулю. Таким образом,
учитывая, что граф Риба является деревом, мы получаем L(K) = 0. Противоречие завершает
доказательство теоремы 6.3.
Пример 6.3. Рассмотрим свободный узел K1 , изображенный на рис. 63. Согласно теореме 6.3
он не является срезанным. Таким образом, ни один из плоских виртуальных узлов K, которому
соответствует свободный узел K1 , также не является срезанным.
7.
ГРАФ-ЗАЦЕПЛЕНИЯ
7.1. Введение. Известно, что классические и виртуальные узлы [99] могут быть представлены
гауссовыми диаграммами, и вся информация об узле и его инвариантах может быть прочитана из
любой гауссовой диаграммы, кодирующей этот узел, см. рис. 70 и рис. 71.
Оказывается, некоторая информация об узле может получена из комбинаторного объекта —
графа пересечений гауссовой диаграммы, см. определение 7.2 и рис. 72. Вершины графа пересечений снабжены числом закрученности. Однако иногда гауссовы диаграммы могут быть получены
из графа пересечений многими способами, см. рис. 33, и некоторые графы (рис. 32) не могут быть
представлены хордовой диаграммой вообще [21] (мы такие графы называем нереализуемыми).
Переходя к графам пересечений, мы помним только информацию о числе закрученности и забываем информацию о циклическом порядке полуребер в каждой вершине, которая задается с
помощью стрелок на гауссовой диаграмме. В принципе возможно описать аналогичные объекты,
когда граф пересечений содержит всю информацию об узле; однако, уже информации о числе закрученности достаточно для восстановления большого объема информации, как мы увидим ниже.
92
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
-
+
+
-
+
+
+
+
+
+
+
+
РИС. 72. Гауссова диаграмма и меченый граф пересечений
1
3
РИС. 73. Сглаживание вдоль двух хорд дает одну или три окружности
Более того, если мы забываем о числе закрученности и только имеем структуру противоположности ребер, мы получаем объекты, которые не могут быть сведены к тривиальным движениями
Рейдемейстера, см. главу 5.
Вероятно, самый легкий и наглядный пример, показывающий, как получить информацию об
узле из его графа пересечений, — это теорема 4.1, позволяющая найти количество окружностей
в состояниях скобки Кауфмана из графа пересечений, см. рис. 73 (на рисунке изображены графы
пересечений и хордовые диаграммы). В частности, она означает, что мы можем обобщить скобку
Кауфмана на все графы, не обязательно соответствующие узлам, причем обобщение совпадает с
обычной скобкой Кауфмана в случае, если граф реализуем хордовой диаграммой. Это было отправной точкой исследования у Л. Тральди и Л. Цулли [206] (петлевые графы): они построили
независимо теорию «нереализуемых графов», обладающую многими интересными свойствами теории узлов. Объекты этой теории — это классы эквивалентности (меченых) графов по «движениям
Рейдемейстера» (переведенным на язык графов пересечений). Существенный недостаток такого
подхода состоит в том, что он может быть применен только к узлам, а не к зацеплениям: для кодирования зацепления нужно использовать более сложные объекты, чем гауссовы диаграммы, —
гауссовы диаграммы на многих окружностях. Этот подход получил дальнейшее развитие в работах Тральди [203, 204, 205], и он позволяет кодировать не только узлы, но и зацепления с любым
конечным количеством компонент с помощью меченых графов. Первый вопрос, возникающий при
построении этой теории, следующий: верно или нет, что каждый простой граф эквивалентен петлевому графу виртуального узла? Этот вопрос был отрицательно решен в [160], т.е. не каждый
простой граф эквивалентен реализуемому графу.
Мы предложили другой подход к обобщению узлов и зацеплений: в то время как гауссовы
диаграммы соответствуют трансверсальному проходу каждого перекрестка, мы можем рассмотреть
поворачивающие обходы, см. раздел 4. Кроме того, мы можем закодировать тип прохода вершины
(A-разведение или B-разведение), см. рис. 74. Заметим, что здесь каждая вершина еще будет
иметь метку, зависящую от ориентации противоположных ребер (оснащение 0 или оснащение 1).
Второй важный вопрос — это вопрос об эквивалентности двух теорий: а именно, существует
ли эквивалентность между множеством гомотопических классов петлевых графов, введенных
Тральди и Цулли [206], и множеством граф-узлов, построенных в [77, 78]. Согласно п. 4.4 для
виртуальных узлов существует формула, связывающая матрицы смежности графов пересечений
гауссовой диаграммы и хордовой диаграммы, построенной по поворачивающему обходу, и наоборот. Эта формула позволяет доказать эквивалентность двух теорий [74, 75], при этом, гомотопический класс петлевых графов и граф-узел, построенные из одного и того же узла, переходят при
этой эквивалентности друг в друга. Эта эквивалентность будет описана в п. 7.2.
Вообще, можно рассмотреть произвольный эйлеров цикл на зацеплении и для него сначала
построить хордовую диаграмму, а потом граф пересечений, см. [203]. В настоящей монографии мы
рассматриваем только гауссовы циклы и поворачивающие обходы.
7. Граф-зацепления
93
1
5
6
12
4
3
7
2
13 11
8
10
14
3
9
6
14
4
5
2
1
7
9
13
10
11
12
8
:2-8,3-14,4-6,7-10,
11-13
:1-12,5-9
РИС. 74. Поворачивающий обход изображен тонкой линией; Хордовая диаграмма
Очевидно, что если граф реализуем в смысле гауссовых диаграмм, то он реализуем и в смысле
хордовых диаграмм, построенных по поворачивающему обходу, и наоборот: мы просто в реализуемом случае можем построить оснащенный 4-валентный граф и перерисовать на нем обход, или
воспользоваться эквивалентностью между множеством гомотопических классов петлевых графов
и множеством граф-узлов, см. далее. Отсюда следует, что при доказательстве разных теорем о
нереализуемости каких-либо графов мы можем пользоваться любым из двух подходов: гауссов
цикл или поворачивающий обход. Мы покажем, что не всякий граф эквивалентен графу пересечений гауссовой диаграммы некоторого узла, и, следовательно, используя эквивалентность между
множеством гомотопических классов петлевых графов и множеством граф-узлов, мы сразу получаем, что и не всякий граф эквивалентен графу пересечений хордовой диаграммы, построенной
по поворачивающему обходу некоторого узла. Пример «нереализуемого» петлевого графа впервые
появился в [160, 161]. Итак, теория граф-зацеплений и гомотопических классов петлевых графов
интересна по разнообразным причинам:
а) в некоторых случаях она показывает чисто комбинаторные способы извлечение инвариантов
узлов;
б) в некоторых случаях она дает эвристические подходы к новым «теориям узлов»;
в) она подчеркивает некоторые «графовые» эффекты, которые трудно увидеть в обычной теории
классических и виртуальных узлов.
Отметим, что для граф-зацеплений, и, следовательно, для гомотопических классов петлевых
графов, построена теория гомологий Хованова для граф-узлов [179, 180]. Гомологии Хованова мы
рассмотрим в разделе 8.
Мы назовем граф-зацепление (гомотопический класс петлевых графов) нереализуемым, если
все его представители не реализуемы хордовыми диаграммами. Рассмотрим пару примеров нереализуемых свободных граф-зацеплений и свободных гомотопических классов петлевых графов.
Здесь мы не указываем никакой структуры в вершине (кроме, конечно, структуры противоположности полуребер), поскольку любой граф-зацепление (гомотопический класс петлевых графов) с
таким подлежащим графом не реализуем. Гомотопический класс, порожденный петлевым графом,
изображенном на рис. 32 (слева), дает нам нереализуемый свободный гомотопический класс
петлевых графов. Имея диаграмму виртуального зацепления, мы можем забыть про структуру
проход-переход и циклический порядок полуребер в перекрестке и рассматривать только подлежащий оснащенный 4-граф. Это привело нас к понятию свободного узла и свободного зацепления,
см. главу 5. Как оказалось, некоторую информацию о виртуальном узле можно получить только
из подлежащего оснащенного 4-графа. Этой информации достаточно, чтобы доказать нетривиальность многих свободных узлов и свободных зацеплений. Тот же самый трюк работает и для
граф-зацеплений и гомотопических классов петлевых графов, однако здесь вместо подлежащего
оснащенного 4-графа мы рассматриваем абстрактный граф, который играет роль графа пересечений несуществующей хордовой диаграммы.
Граф, показанный на рис. 75 (слева), сам по себе не реализуем (в смысле гауссовых диаграмм),
но что произойдет, если мы пометим все его вершины некоторым способом и затем попробуем
применить к графу движения Рейдемейстера, надеясь получить реализуемый граф? Для некоторых
94
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
A
A’
РИС. 75. Нереализуемый граф, представляющий тривиальный гомотопический класс
x
РИС. 76. Четный нереализуемый граф, представляющий нереализуемый гомотопический класс
нереализуемых графов такое возможно, см., напр., рис. 75. Гомотопический класс, порожденный
петлевым графом, показанным на рис. 75 (слева), реализуем. В самом деле, второе движение
Рейдемейстера, переведенное на язык гауссовых диаграмм, состоит в добавлении/удалении двух
«параллельных» хорд. На языке графов пересечений, хорды соответствуют вершинам, а «параллельные» хорды соответствуют двум несмежным вершинам, имеющим одинаковые смежности с
оставшимися. Итак, вершины A и A′ на рис. 75 имеют одинаковые смежности, и удаление этих
двух вершин делает наш граф реализуемым.
Проблема нахождения свободных граф-зацеплений и свободных гомотопических классов петлевых графов, не имеющих реализуемых представителей, аналогична проблеме построения виртуальных узлов, не эквивалентных классическим узлам. Оказывается, решение в случае свободных гомотопических классов петлевых графов может быть достигнуто посредством соображений
четности (теорема 7.10): все вершины графа, изображенного на рис. 32 (слева), имеют нечетную
степень, и мы к этому графу не можем сразу применить уменьшающее второе движение Рейдемейстера. Поэтому гомотопический класс этого графа будет нереализуемым в более строгом смысле:
любой его представитель имеет подграф, изоморфный первоначальному графу (мы пренебрегаем
числом закрученности), который не реализуем, и гомотопический класс, в свою очередь, тоже не
реализуем. Также мы имеем пример нереализуемого графа, степени вершин которого четны, см.
рис. 76.
Настоящий раздел устроен следующим образом. Сначала мы даем определения граф-зацепления
и гомотопического класса петлевых графов. Далее, используя четность, доказываем результаты,
касающиеся нетривиальности. В частности, четность позволяет нам построить графозначные инварианты для граф-зацеплений.
В п. 7.4, мы кратко опишем способы построения скобки Кауфмана для граф-зацепления и
некоторых других инвариантов граф-зацеплений. Также мы сформулируем некоторые результаты,
касающиеся минимальности граф-зацеплений.
7.2.
Граф-зацепления и петлевые графы.
7.2.1. Хордовые диаграммы. Любые две эквивалентные (в классе всех виртуальных диаграмм)
связные (см. определение 3.3) виртуальные диаграммы являются эквивалентными в классе связных виртуальных диаграмм [77]. Поэтому, без ограничения общности, мы считаем, что все рассматриваемые виртуальные диаграммы связны и содержат по крайней мере один классический
перекресток [77, 78].
Определение 7.1. Хордовая диаграмма называется меченой, если каждая хорда снабжена меткой (a, α), где a ∈ {0, 1} — оснащение хорды, и α ∈ {±} — знак хорды. Если метки не указаны,
то мы считаем, что все они равны (0, +).
7. Граф-зацепления
(0,+)
(0,-)
(1,+)
(1,-)
95
РИС. 77. Замена хорды парой линий
(0,+)
(1,+)
(0,-)
(1,-)
РИС. 78. Замена классического перекрестка меченой хордой
Хордовая диаграмма называется оснащенной, если каждая хорда снабжена только оснащением,
т.е. 0 или 1.
Пусть D — меченая хордовая диаграмма. Мы можем построить такую виртуальную диаграмму K(D) (с точностью до виртуализации), что диаграмма D совпадает с хордовой диаграммой
некоторого поворачивающего обхода на K(D). Мы погружаем диаграмму D в R2 , вкладывая
окружность диаграммы в плоскость и размещая некоторые хорды внутри окружности, а остальные — вне. После этого мы удаляем окрестности каждого из концов всех хорд и заменяем каждую
хорду парой хорд, соединяющих четыре точки на окружности, которые образовались в результате
удаления двух окрестностей. При этом новые две хорды образуют только классический перекресток, если оснащение хорды равно 0, и образуют классический и виртуальный перекрестки, если
оснащение хорды равно 1, см. рис. 77 (пересечения хорд из разных пар образуют всегда виртуальные перекрестки). Еще мы требуем, чтобы первоначальные части окружности соответствовали
A-разведению, если хорда положительна, и B-разведению, если хорда отрицательна.
Обратно, имея связную виртуальную диаграмму K, мы можем построить меченую хордовую
диаграмму DC (K). Мы рассматриваем поворачивающий обход C на K (виртуальные перекрестки
проходятся трансверсально) и строим оснащенную хордовую диаграмму, как в п. 4.2. Знак хорды
равен + (соотв., −), если обход локально согласуется с A-разведением (соотв., B-разведением).
Оснащение хорды зависит от ориентации противоположных полуребер при движении вдоль C, см.
рис. 78. Нетрудно проверить, что эта операция обратна операции построения виртуальной диаграммы из меченой хордовой диаграммы: если мы рассмотрим хордовую диаграмму D и построим
виртуальную диаграмму K(D) из нее, тогда для некоторого поворачивающего обхода C меченая
хордовая диаграмма DC (K(D)) будет совпадать с D. Это доказывает следующую теорему.
Теорема 7.1 ([131]). Для любой связной виртуальной диаграммы L существует меченая
хордовая диаграмма D такая, что L = K(D).
7.2.2. Движения Рейдемейстера для петлевых графов и граф-зацеплений. Опишем движения
на графах, которые получаются из движений Рейдемейстера на виртуальных диаграммах, используя поворачивающий обход [77, 78] и гауссов цикл [206]. Эти движения в обоих случаях соответствуют «настоящим» движениям Рейдемейстера, когда они применяются к графам, реализуемым
хордовыми диаграммами. Затем мы обобщим эти движения на все графы (не только реализуемые
диаграммами). В результате мы получим два новых объекта: граф-зацепление и гомотопический
96
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
класс петлевых графов. Таким образом, виртуальные диаграммы задаются (с некоторой потерей информации) графами. Возникает аналогия: переход от «реализуемых» гауссовых диаграмм
(классические узлы) к произвольным хордовым диаграммам ведет к понятию виртуального узла, а
переход от реализуемых (посредством хордовых диаграмм) графов к произвольным графам ведет
к понятию двух новых объектов, граф-зацепление и гомотопический класс петлевых графов
(здесь слово «петлевой» соответствует числу закрученности, а именно, если число закрученности
равно −1, то соответствующая вершина в графе имеет петлю). Для построения первого объекта
мы будем использовать меченые простые графы, а для построения второго — (немеченые) графы
без кратных ребер, но петли допускаются.
Определение 7.2. Граф пересечений (см. [36]) Γ(D) хордовой диаграммы D — это простой
граф (без петель и кратных ребер), вершины которого находятся в однозначном соответствии с
хордами диаграммы D, причем две вершины соединены ребром в том и только в том случае, если
соответствующие им хорды зацеплены.
Назовем граф меченым, если каждая его вершина v снабжена меткой (a, α), где a ∈ {0, 1} —
это оснащение вершины v, а α ∈ {±} — знак вершины v.
Пусть D — меченая хордовая диаграмма. Меченый граф пересечений, ср. [189, 36], G(D)
диаграммы D — это граф пересечений, каждая вершина которого снабжена соответствующей
меткой. Простой граф H называется реализуемым, если существует такая хордовая диаграмма D,
что H = G(D). В противном случае граф называется нереализуемым.
Замечание 7.1. Мы будем еще рассматривать простые графы, каждая вершина которых имеет
одну метку, 0 или 1. Назовем такие графы оснащенными. Таким образом, мы имеем два типа
оснащенных графов: 4-валентные графы и простые графы. Из текста всегда будет ясно, какой
оснащенный граф мы рассматриваем.
В реализуемом случае, оснащенные графы — это графы пересечений оснащенных хордовых
диаграмм.
Следующая лемма очевидна.
Лемма 7.1. Простой граф реализуем, если и только если каждая его компонента связности
реализуема.
Определение 7.3. Пусть G — произвольный граф и v ∈ V(G). Множество всех вершин графа
G смежных с v называется окрестностью вершины v и обозначается N (v).
Определим две операции на простых немеченых графах, которые на языке матриц смежности
совпадают с преобразованиями из определений 4.9 и 4.10 с точностью до меток.
Определение 7.4 (Локальное дополнение). Пусть G — произвольный граф. Локальное дополнение графа G в вершине v ∈ V(G) — это операция, которая меняет смежности только между
вершинами a, b ∈ N (v) и a ̸= b (остальные смежности остаются без изменений). Обозначим граф,
полученный из G с помощью операции локальное дополнение в вершине v, через LC(G; v).
Определение 7.5 (Шарнирное преобразование). Пусть G — произвольный граф с двумя различными вершинами u и v. Шарнирное преобразование графа G в вершинах u и v — это
операция, которая меняет смежности только между такими вершинами x, y, что x, y ∈
/ {u, v},
x ∈ N (u), y ∈ N (v) и либо x ∈
/ N (v), либо y ∈
/ N (u) (остальные смежности остаются без изменений). Обозначим граф, полученный из G с помощью шарнирной операции в вершинах u и v, через
piv(G; u, v).
Пример 7.1. На рис. 79 изображены графы G, LC(G; u) и piv(G; u, v).
Из определения 4.10 сразу следует
Лемма 7.2. Если вершины u и v смежны, то существует изоморфизм
piv(G; u, v) ∼
= LC(LC(LC(G; u); v); u).
Определим граф-преобразования, т.е. преобразования меченых графов. Мы рассматриваем меченые хордовые диаграммы, построенные посредством поворачивающих обходов, и движения на
7. Граф-зацепления
u
v
u
v
LC(G;u)
G
97
u
v
P(G;u,v)
РИС. 79. Локальное дополнение и шарнирное преобразование
них, которые получаются из «настоящих» движений Рейдемейстера виртуальных диаграмм. Затем мы эти движения переносим на произвольные меченые графы, используя графы пересечений
хордовых диаграмм. В результате мы получим новый объект — класс эквивалентности меченых
графов по формальным движениям [77, 78].
Определение 7.6. Ωg 1. Первое граф-преобразование состоит в добавлении/удалении изолированной вершины с меткой (0, α), α ∈ {±}.
Ωg 2. Второе граф-преобразование состоит в добавлении/удалении двух несмежных (соотв.,
смежных) вершин с метками (0, ±α) (соотв., (1, ±α)), и имеющих одинаковые смежности с остальными вершинами.
Ωg 3. Третье граф-преобразование определяется следующим образом. Пусть u, v, w — произвольные три вершины графа G, все имеющие метки (0, −), причем вершина u смежна только с
вершинами v и w в G, а вершины v и w не смежны
толь( друг с другом.
) ∪( Тогда мы изменяем
)
ко смежности вершины u с вершинами v, w и t ∈ N (v) \ N (w)
N (w) \ N (v) . Кроме того,
мы еще меняем знаки вершин v и w на +. Обратная операция также называется третьим графпреобразованием.
Ωg 4. Четвертое граф-преобразование для графа G определяется следующим образом. Мы
берем две смежные вершины u и v с метками (0, α) и (0, β) соответственно. Заменяем граф G на
piv(G; u, v) и, кроме того, меняем знаки вершин u и v на −α и −β соответственно.
Ωg 4′ . В этом четвертом граф-преобразовании мы берем одну вершину v с меткой (1, α).
Заменяем G на LC(G; v) и, кроме того, меняем знак вершины v и оснащение каждой вершины
u ∈ N (v).
Замечание 7.2. Четвертые граф-преобразования Ωg 4 и Ωg 4′ в реализуемом случае соответствуют замене поворачивающего обхода диаграммы зацепления другим поворачивающим обходом, см.
утверждение 4.1. Иногда, применяя эти преобразования, мы будем просто говорить, что мы меняем
обход.
Замечание 7.3. Мы определили граф-преобразования для меченых графов. Если мы рассматриваем оснащенные графы, то для них граф-преобразования получаются из граф-преобразований
Ωg 1−Ωg 4′ забыванием знака, т.е. второй компоненты метки. В этом случае мы будем использовать
те же самые обозначения.
Сопоставление граф-преобразований с движениями Рейдемейстера приводит к следующей теореме.
Теорема 7.2. Пусть G1 и G2 — два меченых графа пересечений виртуальных диаграмм K1
и K2 соответственно. Если K1 и K2 эквивалентны в классе связных диаграмм, тогда G1 и
G2 получаются друг из друга последовательностью граф-преобразований Ωg 1 − Ωg 4′ .
Определение 7.7. Граф-зацепление — это класс эквивалентности простых меченых графов по
граф-преобразованиям Ωg 1 − Ωg 4′ .
Замечание 7.4. Имея хордовую диаграмму, мы можем построить атом, см. п. 3.4, соответствующий хордовой диаграмме. Хордовые диаграммы, все хорды которых имеют оснащение 0,
кодируют ориентируемые атомы. Хордовые диаграммы, все хорды которых положительны, кодируют атомы с одной белой клеткой: эта белая клетка соответствует A-состоянию (состоянию, в
→
) виртуальной диаграммы. Напомним,
котором все перекрестки разведены способом A :
98
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
u
u
v
w
v
w
РИС. 80. Третье движение Рейдемейстера
что B-состояние диаграммы виртуального узла — это разведение всех перекрестков диаграммы
способом B :
→
.
Для граф-зацеплений, имеющих представитель с ориентированным атомом, существует два
формально различных отношения эквивалентности. Первое отношение описано в [77] (которое
включает в себя только диаграммы с ориентируемыми атомами), а второе определено здесь. Мы
знаем, что эти две эквивалентности совпадают [77], поэтому мы используем тот же самый термин
«граф-зацепления».
Следующее определение аналогично определению свободных узлов. Мы рассматриваем только
одну метку–оснащение на графе, которая в реализуемом случае как раз и отвечает за структуру
противоположности ребер.
Определение 7.8. Свободный оснащенный граф — это класс эквивалентности оснащенных
(простых) графов по граф-преобразованиям Ωg 4 и Ωg 4′ . Свободное граф-зацепление — это класс
эквивалентности свободных оснащенных графов по граф-преобразованиям Ωg 1 − Ωg 3.
Определение 7.9. Мы назовем свободный оснащенный граф реализуемым, если каждый его
представитель реализуем с помощью хордовой диаграммы.
Замечание 7.5. Не трудно показать, что свободный оснащенный граф реализуем, если и только
если у него имеется реализуемый представитель (мы просто перерисовываем картинку).
Рассмотрим теперь другой подход, основанный на гауссовом цикле. Пусть DG (K) — гауссова
диаграмма виртуальной диаграммы K. Построим граф, полученный из графа пересечений диаграммы DG (K) добавлением петель вершинам, соответствующим отрицательным хордам, т.е. перекресткам, имеющим отрицательное число закрученности [206]. Мы будем называть такие графы
петлевыми графами. Опишем движения на петлевых графах. Эти движения аналогичны графпреобразованиям и также соответствуют настоящим движениям Рейдемейстера.
Определение 7.10. Ω1. Первое движение Рейдемейстера для петлевых графов состоит в добавлении/удалении изолированной вершины (петлевой или непетлевой).
Ω2. Второе движение Рейдемейстера для петлевых графов состоит в добавлении/удалении
двух вершин, имеющих одинаковые смежности со всеми вершинами, и, кроме того, одна из них
петлевая, а другая нет.
Ω3. Третье движение Рейдемейстера для петлевых графов определяется следующим образом.
Пусть u, v, w — три такие вершины, что вершина v является петлевой, вершина w не является
петлевой, вершины v и w смежны, вершина u не смежна с вершинами v и w, а каждая вершина
x∈
/ {u, v, w} либо не смежна со всеми вершинами u, v, w, либо смежна ровно с двумя из них.
Тогда при третьем преобразовании мы меняем смежности только между тремя вершинами u, v, w,
см. рис. 80. Обратная операция также называется третьем движением Рейдемейстера.
Замечание 7.6. Два третьих движения Рейдемейстера (первое движение — это когда третья
вершина петлевая, а второе — не является петлевой) не исчерпывают все возможные представления третьего классического движения на гауссовых диаграммах [206]. Можно показать, что все
другие версии третьего движения, которые изображены на рис. 81 (мы меняем смежности только
между тремя выделенными вершинами), являются комбинациями вторых и третьих движений,
описанных в определении 7.10, см. [182].
7. Граф-зацепления
99
u
u
w
w
v
u
u
w
w
v
v
РИС. 81. Возможные конфигурации третьего движения Рейдемейстера
Определение 7.11. Мы назовем класс эквивалентности графов (без кратных ребер, но петли
допускаются) по трем движениям, описанным в определении 7.10, гомотопическим классом петлевых графов. Свободный гомотопический класс петлевых графов — это класс эквивалентности
простых графов по движениям с точностью до петель, т.е. в движениях мы забываем про петли.
Замечание 7.7. Отношение эквивалентности из определения 7.11 называется эквивалентностью Рейдемейстера в [206], и оно отличается от классической гомотопии зацеплений.
Петлевые графы кодируют только узлы, а граф-зацепления могут кодировать связные виртуальные диаграммы с любым количеством компонент. Подход с помощью поворачивающего обхода
имеет преимущество в этом смысле. Можно обобщить эти два подхода и рассмотреть произвольный эйлеров цикл на диаграмме зацепления. Это было инициировано Л. Тральди в [203], где он
ввел понятие помеченных графов.
Определение 7.12. Мы назовем (свободное) граф-зацепление (соотв., (свободный) гомотопический класс петлевых графов) реализуемым, если существует его представитель, реализуемый
хордовой диаграммой.
7.2.3. Петлевые графы и граф-зацепления. Пусть G — произвольный меченый граф с множеством вершин V(G) = {v1 , . . . , vn }.
Определение 7.13. Матрица смежности A(G) меченого графа G — это матрица (aij ) над Z2 ,
для которой aii равно оснащению вершины vi , aij = 1, i ̸= j, если и только если вершины vi и vj
смежны, и aij = 0 в противном случае.
Утверждение 7.1 (см. [77, 78]). Если графы G и G′ представляют одно и то же графзацепление, то corankZ2 (A(G) + E) = corankZ2 (A(G′ ) + E), где E — единичная матрица. Таким
образом, число corankZ2 (A(G) + E), где G — представитель граф-зацепления F, является инвариантом граф-зацепления F.
Определение 7.14. Число компонент граф-зацепления F — это corankZ2 (A(G) + E) + 1, здесь
G — представитель граф-зацепления F. Граф-зацепление F, для которого corankZ2 (A(G) + E) = 0
для любого представителя G из F, называется граф-узлом.
Предположим, что corankZ2 (A(G) + E) = 0, и положим Bi (G) = A(G) + E + Eii для каждой
вершины vi ∈ V(G), здесь Eii — матрица с одним ненулевым элементом, равным 1 и стоящим
на пересечении i-го столбца и i-ой строки. Число закрученности wi графа G (с corankZ2 (A(G) +
E) = 0) в вершине vi — это wi = (−1)corankZ2 Bi (G) signvi , и число закрученности графа G — это
n
∑
w(G) =
wi .
i=1
100
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Замечание 7.8. Если граф реализуем хордовой диаграммой и, следовательно, виртуальной диаграммой, то мы можем найти число компонент полученного зацепления, используя формулу из
теоремы 4.1. Найденную формулу можно использовать для определения числа компонент нереализуемого графа. В результате мы и получим определение 7.14.
Также отметим, что в реализуемом случае wi — это «настоящее» число закрученности перекрестка, соответствующего вершине vi .
Заметим, что в настоящем разделе мы пользуемся следующим основным принципом: Предположим, что существует равенство, в котором участвуют количества окружностей некоторых
состояний хордовых диаграмм, причем это равенство может быть сформулировано в терминах графа пересечений. Тогда соответствующее равенство верно также и для нереализуемых
графов.
Причина, по которой этот принцип верен, в следующем: каждый раз мы имеем картинку, где
некоторые два количества окружностей равны друг другу (или отличаются на константу), это
может быть выражено в терминах соответствующих матриц смежности, и доказательство в общем
случае не зависит от поведения матрицы вне перекрестков, о которых идет речь. Это означает, что
равенство верно для матриц общего вида, таким образом, оно верно и для произвольных графов.
Этот принцип имеет множество следствий. Мы рассмотрим два примера.
Первый пример связан определением 7.14. Он показывает, что количество компонент, определенное для нереализуемого графа той же самой формулой, что и для реализуемого графа, не меняется
при движениях граф-преобразованиях, а число закрученности не меняется при втором, третьем и
четвертых граф-преобразованиях, но меняется на ±1 при первом граф-преобразовании.
Второй пример следующий. Предположим, что мы имеем оснащенный 4-граф K с вершиной v, и
мы хотели бы знать, принадлежит ли эта вершина одной компоненте (здесь компонента в смысле
зацепления) или разным компонентам соответствующего граф-зацепления. Мы можем рассмотреть
два сглаживания (разведения) Ka , Kb графа K в v и увидеть, сколько компонент мы получили
после разведения. Если v принадлежит одной компоненте, то число компонент одного из графов
Ka , Kb равно числу компонент графа K, и число компонент другого графа равно числу компонент
графа K плюс один. Если v принадлежит двум разным компонентам графа K, то число компонент
каждого из Ka , Kb равно числу компонент K минус один. Переходя к граф-зацеплениям и беря
коранги матриц, мы можем увидеть, принадлежит ли вершина графа одной компоненте графзацепления или двум разным.
Этот метод также используется для доказательства инвариантности скобки Кауфмана для графзацеплений, см. далее.
Покажем, что множество гомотопических классов петлевых графов эквивалентно множеству
граф-узлов, т.е. докажем следующую теорему.
Теорема 7.3. Существует взаимно однозначное соответствие между множеством петлевых графов и множеством классов эквивалентности меченых графов G с corankZ2 (A(G)+E) =
0 по четвертым граф-преобразованиям, которое порождает эквивалентность между множеством гомотопических классов петлевых графов и множеством граф-узлов. Причем, графузел и гомотопический класс, построенные оба из одной и той же виртуальной диаграммы,
связаны этой эквивалентностью.
Сначала докажем вспомогательные леммы и дадим необходимые определения.
Замечание 7.9. На самом деле это соответствие мы уже построили, см. теорему 4.4. Остается
проверить, что оно правильно себя ведет при граф-преобразованиях и движениях Рейдемейстера
для петлевых графов.
bi,j,...,k матрицу, полученную из матрицы C удалением столбцов и строк с
Обозначим, через C
\
bi,j,...,k (G) вместо B(G)
номерами i, j, . . . , k. Мы будем писать B
.
i,j,...,k
Лемма 7.3. Имеет место равенство wi (G) = (−1)corankZ2
bi (G)+1
B
Доказательство. Мы докажем равенство только для w1 . Пусть
(
)
a b⊤
A(G) + E =
b C
sign vi .
7. Граф-зацепления
101
и
corankZ2 (A(G) + E) = 0 ⇐⇒ det(A(G) + E) = 1,
здесь жирные буквы соответствуют вектор-столбцу. Имеем
(
)
(
)
(
)
a + 1 b⊤
a b⊤
1 0⊤
det B1 (G) = det
= det
+ det
b
C
b C
b C
и
b1 (G) = C, det(B1 (G)) = det(A(G) + E) + det C = 1 + det B
b1 (G).
B
Последнее равенство и доказывает лемму для случая w1 .
Лемма 7.4. Пусть G — меченый граф с det B(G) = 1 и B(G)−1 = (bij ). Тогда
bii =
1 − wi (G) sign vi
.
2
Доказательство. Имеем
b
b
wi (G) = (−1)corankZ2 Bi (G)+1 sign vi ⇐⇒ wi (G) sign vi = (−1)corankZ2 Bi (G)+1 ⇐⇒
wi (G) sign vi + 1
⇐⇒
2
bi (G) = 1 − corankZ B
bi (G) = 1 − wi (G) sign vi .
⇐⇒ bii = det B
2
2
bi (G) =
⇐⇒ corankZ2 B
Определение 7.15. Определим матрицу смежности A(L) = (aij ) над Z2 для петлевого графа
L, все вершины которого занумерованы, как: aii = 1, если и только если вершина с номером
i является петлевой, т.е. существует петля в этой вершине, и aii = 0, если соответствующая
вершина не является петлевой; aij = 1, i ̸= j, если и только если вершина с номером i смежна
вершине с номером j, и aij = 0 иначе.
Построим отображение χ из множества всех граф-узлов в множество всех гомотопических
классов петлевых графов. Мы покажем, что это отображение имеет обратное.
Пусть G — произвольный представитель граф-узла F. Рассмотрим простой граф H с матрицей
смежности, равной матрице (A(G) + E)−1 с точностью до диагональных элементов, см. определение 4.6. Построим граф L(G) из графа H, добавляя петли в вершины графа H, которые
соответствуют вершинам графа G с отрицательным числом закрученности (см. определение 7.14).
Определим отображение χ из множества граф-узлов в множество гомотопических классов петлевых графов, положив χ(F) = L, где L — гомотопический класс петлевого графа L(G).
Теорема 7.4. Отображение χ корректно определено.
Доказательство. Пусть G1 , G2 — два представителя граф-узла F, и пусть B(Gi ) = A(Gi ) + E,
B(Gi )−1 = (bkl
i ). Мы должны показать, что гомотопические классы петлевых графов L(G1 ) и
L(G2 ) совпадают, т.е. графы L1 = L(G1 ) и L2 = L(G2 ) получаются друг из друга движениями
Рейдемейстера на петлевых графах.
Рассмотрим четыре случая, которые соответствуют каждому из четырех граф-преобразований.
1) Мы знаем, что, если меченые графы G1 и G2 получаются друг из друга четвертыми движениями Ωg 4 и/или Ωg 4′ (напомним, что в реализуемом случае эти движения соответствуют
смене поворачивающего обхода), то числа закрученности соответствующих вершин графов G1 и
G2 совпадают, см. [77, 78], и графы L1 и L2 изоморфны с точностью до петель, т.е. их матрицы
смежности совпадают с точностью до диагональных элементов, см. теорему 4.4. Из этих двух
утверждений мы немедленно получаем изоморфизм петлевых графов L1 и L2 .
2) Пусть G1 и G2 связаны первым граф-преобразованием Ωg 1 (без ограничения общности будем
считать, что удаляется вершина с номером 1). Имеем
(
)
1
0⊤
B(G1 ) =
,
B(G2 ) = A(G2 ) + E,
0 A(G2 ) + E
)
(
1
0⊤
−1
,
B(G2 )−1 = (A(G2 ) + E)−1 ,
B(G1 ) =
0 (A(G2 ) + E)−1
102
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
здесь 0 обозначает вектор-столбец соответствующего размера, состоящий из 0. Следовательно, L2
получается из L1 с помощью движения Ω1.
3) Пусть графы G1 и G2 получаются друг из друга вторым граф-преобразованием Ωg 2 (без
ограничения общности будем считать, что удаляются вершины с номерами 1 и 2). Имеем два
случая.
В первом случае
1 0
a⊤
,
B(G1 ) = 0 1
B(G2 ) = A(G2 ) + E,
a⊤
a a A(G2 ) + E
а во втором
0 1
a⊤
,
B(G1 ) = 1 0
a⊤
a a A(G2 ) + E
B(G2 ) = A(G2 ) + E.
Рассмотрим только первый случай. Мы знаем, что w1 (G1 ) = −w2 (G1 ) в G1 [77, 78]. Кроме того,
так как
e⊤
e⊤
e⊤
1 0 a
1 0 a
1 0 a
det 0 1 a
e⊤ = det 1 1 0⊤ = det 1 1 0⊤ = det C,
e a
e C
e a
e C
0 0 C
a
a
то
b c
d⊤
, B(G2 )−1 = (A(G2 ) + E)−1 .
B(G1 )−1 = c b
d⊤
−1
d d (A(G2 ) + E)
Это означает, что петлевые графы L1 и L2 связаны вторым движением Рейдемейстера Ω2.
4) Предположим, что графы G1 и G2 получаются друг из друга третьим граф-преобразованием
Ωg 3. Пусть соответствующие вершины графов G1 и G2 под действием Ωg 3 имеют одинаковые
номера (в [77] мы использовали другую нумерацию). Докажем, что L1 и L2 связаны последовательностью вторых Ω2 и третьих Ω3 движений Рейдемейстера.
Имеем
1 1 1 0⊤
1 1 0 a⊤
B(G1 ) =
1 0 1 b⊤ ,
0 a b C
1 1 1 0⊤
0 1 a⊤
1 1 0 a⊤
1 0 b⊤ ,
1 = det B(G1 ) = det
1 0 1 b⊤ = det
a b C
0 a b C
1
0 0 (a + b)⊤
0
1 0
b⊤
,
B(G2 ) =
det B(G2 ) = 1
⊤
0
0 1
a
a+b b a
C
Покажем, что либо вершины v1 , v2 , v3 ∈ V(L1 ), либо вершины ve1 , ve2 , ve3 ∈ V(L2 ) имеют конфигурацию, изображенную на рис. 81.
Имеем ([77])
wi (G1 ) = wi (G2 ), i = 1, 2, 3,
1 0 a⊤
b1 (G1 ) = det 0 1 b⊤ =
det B
a b C
1 0 a⊤
0 0 a⊤
= det 1 1 b⊤ + det 1 1 b⊤ =
0 b C
a b C
7. Граф-зацепления
103
1 0 a⊤
0 1 a⊤
0 1 a⊤
= det 1 1 b⊤ + det 1 1 b⊤ + det 1 0 b⊤ ,
0 b C
a 0 C
a b C
(
)
1 1 0⊤
0 b⊤
⊤
b
det B2 (G1 ) = det
= det
,
1 1 b
b C
0 b C
(
)
1 1 0⊤
⊤
0
a
⊤
b
det B3 (G1 ) = det 1 1 a = det
,
a C
0 a C
)
)
(
)
(
(
1 0 a⊤
0 b⊤
1 a⊤
1 a ⊤ + b⊤
12
⊤
,
+ det
= det
= det
b1 = det
1 1 b
b C
b C
b
C
0 b C
(
)
(
)
(
)
1 1 a⊤
⊤ + b⊤
⊤
⊤
1
a
1
b
0
a
13
⊤
= det
+ det
,
b1 = det 1 0 b = det
a
C
a C
a C
0 a C
(
)
1 1 0⊤
1 b⊤
23
⊤
b1 = det
= det
,
1 0 b
a C
0 a C
0
0 b⊤
0 0 b⊤
0
b12
1 a⊤ = det 1 1 a⊤ =
2 = det
a+b a C
b a C
0 1 b⊤
0 1 b⊤
= det 1 0 a⊤ + det 1 1 a⊤ = 1 + b12
1 ,
b a C
b 0 C
0
1 b⊤
1 1 b⊤
0
b13
0 a⊤ = det 0 0 a⊤ =
2 = det
a+b b C
a b C
⊤
1 0 b
1 1 b⊤
= det 0 1 a⊤ + det 0 1 a⊤ = 1 + b13
1 ,
a b C
a 0 C
1
0 (a + b)⊤
1 0 b⊤
0
= det 0 0 a⊤ =
b23
0
a⊤
2 = det
a+b b
C
a b C
1 0 b⊤
1 0 b⊤
⊤
= det
+ det
0 1 a
0 1 a⊤ = 1 + b23
1 .
a b C
a 0 C
23
b
b12
1 = b1 + det B2 (G1 ),
23
b
b13
1 = b1 + det B3 (G1 ),
13
b
b12
1 + b1 = det B1 (G1 ) + 1,
12
b12
2 = b1 + 1,
13
b13
2 = b1 + 1,
23
b23
2 = b1 + 1.
Используя последние равенства, нетрудно показать, что либо вершины v1 , v2 , v3 ∈ V(L1 ), либо
вершины ve1 , ve2 , ve3 ∈ V(L2 ) имеют конфигурацию, изображенную на рис. 81. Также из этих равенств видно, что конфигурация другой тройки вершин получается из структуры первой тройки
сменой соответствующих смежностей.
i
Обозначим через f вектор-столбец, полученный из вектор-столбца f удалением i-го элемента,
i
и обозначим через C j (соотв., C j ) матрицу, полученную из матрицы C удалением j-го столбца
(соотв., i-ой строки и j-го столбца).
104
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Покажем, что смежность двух вершин, каждая из которых отлична от вершин v1 , v2 , v3 ∈
V(L1 ), в графе L1 совпадает со смежностью двух соответствующих вершин в графе L2 , т.е. равны
соответствующие элементы матриц B(G1 )−1 и B(G2 )−1 . Для i, j > 3 имеем
1
1
1
0⊤
1
1
0
(aj−3 )⊤
ij
j−3
b1 = det
=
0
1
(b )⊤
1
i−3
i−3
C j−3
0 ai−3 b
(
j−3 )⊤
1
0
0
(a + b)
j−3
0
1
0
(b )⊤
ij
= det
= b2 ,
0
0
1
(aj−3 )⊤
i−3
(a + b)
b
i−3
ai−3
i−3
C j−3
j−3
j−3
0
1 0 (b )⊤
1 1 0 (b )⊤
1j
b21j = det
0
0 1 (aj−3 )⊤ = det 1 0 1 (aj−3 )⊤ = b1 ,
(a + b) b a
C j−3
0 b a
C j−3
(
(
j−3 )⊤
j−3 )⊤
1
0 0 (a + b)
1 0 0 (a + b)
= det 1 0 1
=
b22j = det 0
0 1
(aj−3 )⊤
(aj−3 )⊤
C j−3
C j−3
a+b b a
0 b a
j−3 ⊤
j−3 ⊤
1 0 0 (b )
1 1 0 (b )
= det 1 1 1
= b2j
= det 1 0 1
0⊤
0⊤
1 ,
0 b a
C j−3
0 b a
C j−3
3j
аналогично получаем b3j
1 = b2 .
Осталось проверить, что каждая вершина x ∈
/ {v1 , v2 , v3 } либо смежна ровно двум вершинам
из множества вершин {v1 , v2 , v3 } для L1 , либо ни одной (аналогично для L2 и соответствующего
2j
3j
1j
2j
множества вершин). Это утверждение эквивалентно двум равенствам b1j
1 +b1 +b1 = 0 и b2 +b2 +
b3j
2 = 0. Используя ранее выведенные равенства, достаточно проверить только первое равенство.
Имеем
(
)
1 1 1
0⊤
j−3 ⊤
)
1
0
(b
j−3
2j
b1 = det 1 0 1 (b )⊤ = det
,
a b
C j−3
C j−3
0 a b
)
(
1 1 1
0⊤
0 1 (aj−3 )⊤
3j
j−3
⊤
b1 = det
= det
,
1 1 0 (a )
C j−3
a b
0 a b
C j−3
1 1 0 (aj−3 )⊤
1 0 1 (bj−3 )⊤ =
b1j
1 = det
0 a b
C j−3
(
)
)
(
j−3 ⊤
3j
(a
+
b)
1
1
= det
= b2j
1 + b1 .
a b
C j−3
Мы доказали, что наши тройки вершин удовлетворяют всем требованиям замечания 7.6, следовательно, петлевые графы L1 и L2 получаются друг из друга последовательностью вторых Ω2 и
третьих Ω3 движений Рейдемейстера.
Определим теперь отображение ψ из множества всех гомотопических классов петлевых графов
в множество всех граф-узлов. Пусть L — гомотопический класс какого-то графа L. Используя
лемму 4.2, мы можем построить симметрическую матрицу A = (aij ) над Z2 , совпадающую с
матрицей смежности графа L с точностью до диагональных элементов и имеющую det A = 1.
Пусть G(L) — меченый граф, имеющий матрицу смежности, равную (A−1 + E). Следовательно,
первая компонента метки вершины равна соответствующему диагональному элементу матрицы
(A−1 + E), а вторую компоненту метки вершины с номером i определим равенством wi (1 − 2aii ),
7. Граф-зацепления
105
где wi = 1, если вершина с номером i графа L не имеет петли, и wi = −1 иначе. Положим
ψ(L) = F, где G(L) — представитель граф-узла F.
Лемма 7.5. Граф-узел F не зависит от выбора диагональных элементов при построении
матрицы A.
Доказательство. Независимость граф-узла F (с точностью до знака, т.е. до второй компоненты
метки вершины) от выбора диагональных элементов следует из теоремы 4.4.
Действительно, пусть A1 и A2 — две симметрические матрицы над Z2 , совпадающие с матрицей смежности графа L с точностью до диагональных элементов и имеющие det A1 = det A2 = 1.
−1
′
Тогда матрицы (A−1
1 + E) и (A2 + E) получаются друг из друга четвертыми Ωg 4 и/или Ωg 4 графпреобразованиями (с точностью до знака вершины). Осталось заметить, что мы определили знак
вершины таким образом, что петлевые вершины соответствуют вершинам с отрицательным числом закрученности, а непетлевые вершины — вершинам с положительным числом закрученности
(лемма 7.4). Кроме того, число закрученности не меняется при четвертых граф-преобразованиях
Ωg 4, Ωg 4′ , а число закрученности и оснащение вершины полностью определяют знак вершины.
Теорема 7.5. Отображение ψ корректно определено.
Доказательство. Пусть L1 , L2 — произвольные два представителя гомотопического класса L.
Покажем, что граф-узлы, имеющие своими представителями графы G1 = G(L1 ) и G2 = G(L2 )
соответственно, совпадают. Для этого, используя лемму 7.5, достаточно показать, что графы G1 и
G2 связаны друг с другом последовательностью граф-преобразований.
Рассмотрим три случая.
1) Пусть L1 и L2 получаются друг из друга первым движением Рейдемейстера Ω1. Допустим,
что мы удаляем вершину с номером 1 (достаточно рассмотреть только этот случай). Имеем
(
)
a
0⊤
A(L1 ) =
,
a ∈ {0, 1}.
0 A(L2 )
e 2 ) = 1, где матрица A(L
e 2 ) совпадает с матрицей A(L2 ) с точностью до
Предположим, что det A(L
диагональных элементов, и
(
)
1
0⊤
e 1) =
A(L
e 2) .
0 A(L
Тогда
e 1 )−1 =
A(L
(
1
0⊤
e 2 )−1
0 A(L
)
,
и, следовательно, графы G1 и G2 связаны последовательностью граф-преобразований Ωg 1, Ωg 4,
Ωg 4′ .
2) Пусть L1 и L2 получаются друг из друга вторым движением Рейдемейстера Ω2, удалением
вершин с номерами 1 и 2 (достаточно рассмотреть только этот случай). Имеем
0 b
a⊤
A(L1 ) = b 1
a⊤ , b ∈ {0, 1}.
a a A(L2 )
e 2 ) = 1, где матрица A(L
e 2 ) совпадает с матрицей A(L2 ) с точностью до
Предположим, что det A(L
диагональных элементов, и
1+b
b
a⊤
e 1 ) = 1.
e 1) = b
1+b
a⊤ , det A(L
A(L
e
a
a
A(L2 )
Так как
e⊤
e⊤
1+b
b
a
1+b b a
det b
e⊤ = det 1
1+b a
1 0⊤ =
e
e
e
e C
a
a
C
a
a
106
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
e⊤
1+b b a
= det 1
1 0⊤ = det C,
0
0 C
(
det
1+b
a⊤
e 2)
a
A(L
то
)
(
= det
b
a⊤
e 2)
a A(L
)
e 2 ),
+ det A(L
f
f +1
d⊤
.
f
d⊤
= f +1
e 2 )−1
d
d
A(L
e 1 )−1
A(L
e 1 )−1 следует, что две вершины (не принадлежащие графу G2 ) имеют
Из структуры матрицы A(L
одинаковое оснащение и одинаковые смежности, а из структуры матрицы A(L1 ) и из совпадения
оснащений вершин следует, что эти две вершины имеют разные знаки. Это означает, что графы
G1 и G2 связаны друг с другом последовательностью граф-преобразований Ωg 2, Ωg 4, Ωg 4′ .
3) Предположим, что петлевые графы L1 и L2 получаются друг из друга третьим движением
Рейдемейстера Ω3. Занумеруем все вершины V(Li ) = {v1i , . . . , vni } таким образом, чтобы соответствующие вершины петлевых графов L1 и L2 при движении Ω3 имели один и тот же номер, и без
ограничения общности предположим, что вершины v11 и v31 являются петлевыми, вершина v21 не
является петлевой, вершина v11 смежна вершине v21 , вершина v31 не смежна ни одной из вершин
v11 и v21 в петлевом графе L1 . Случай, когда вершина v31 не является петлевой, получается из
предыдущего случая применением вторых и третьих движений Рейдемейстера.
Имеем
1 1 0 a⊤
1 0 1 a⊤
⊤
1 0 0 b⊤
, A(L2 ) = 0 0 1 b ,
A(L1 ) =
⊤
⊤
0 0 1 c
1 1 1 c
a b c D
a b c D
a + b + c = 0.
Без ограничения общности (если нужно, то применим второе движение Рейдемейстера), мы
можем считать, что c ̸= 0. Используя доказательство леммы 4.2, построим матрицу
0 1 0 a⊤
⊤
e 1 ) = 1 1 0 b⊤
A(L
0 0 0 c
e
a b c D
e 1 ) = 1.
с det A(L
Так как
0 0 1 a⊤
0 0 1 b⊤
det
1 1 1 c⊤
e
a b c D
мы имеем
0
0
= det
1
a
0
0
0
c
1 a⊤
0 c⊤
= det
⊤
1 c
e
c D
0
0
e 2) =
A(L
1
a
0
0
1
b
0
0
1
a
0
0
0
c
1 a⊤
0 c⊤
e 1 ) = 1,
= det A(L
1 b⊤
e
b D
(7.1)
1 a⊤
1 b⊤
.
1 c⊤
e
c D
−1 = (e
e 1 )−1 = (e
e
Пусть A(L
aij
aij
1 ), A(L2 )
2 ), и пусть Gi = G(Li ), i = 1, 2, — два меченых графа,
−1
e
имеющие матрицы смежности A(Li ) + E. Покажем, что графы G1 и G2 получаются друг из
друга последовательностью граф-преобразований Ωg 2, Ωg 3, Ωg 4, Ωg 4′ .
7. Граф-зацепления
Совершая элементарные преобразования,
Далее, получаем
0 1
1 1
e 1 ) = det
1 = det A(L
0 0
a b
107
как в равенстве (7.1), мы имеем e
aij
aij
1 =e
2 для i, j > 3.
0 a⊤
0 b⊤
= det
⊤
0 c
e
c D
0
1
1
a
1
1
0
b
0 a⊤
0 b⊤
=
0 0⊤
e
c D
1 0 a⊤
1 0 b⊤
a11
= det 1 0 b⊤ = det 0 0 c⊤ = e
1 ,
e
e
b c D
b c D
1 0 b⊤
1 0 b⊤
0 0 c⊤ = det 0 0 c⊤ = 1,
e
a12
1 = det
e
e
b c D
a c D
1 1 b⊤
0 1 b⊤
0 0 c⊤ = det 0 0 c⊤ = 1,
e
a13
1 = det
e
e
a b D
c b D
j−3
1 1 0 (b )⊤
j−3 )⊤
e
a1j
= 0, j > 3 (a + b + c = 0),
1 = det 0 0 0 (c
e
Dj−3
a b c
0 1 0 (aj−3 )⊤
0 1 0 (aj−3 )⊤
0 0 0 (cj−3 )⊤ = det 0 0 0 (cj−3 )⊤ ,
e
a2j
1 = det
e j−3
e j−3
a b c D
a 0 c D
0 1 0 (aj−3 )⊤
0 1 0 (aj−3 )⊤
j−3 ⊤
j−3
) = det 1 0 0 (b )⊤ .
e
a3j
1 = det 1 1 0 (b
e j−3
e j−3
D
D
a b c
a 0 c
Если либо e
a22
a33
1 = 0, либо e
1 = 0, то мы можем применить одни и те же вторые граф-преобразования
к меченым графам G1 и G2 и, после этого, применить еще четвертое граф-преобразование Ω′g 4.
В результате мы получим, что соответствующие вершины имеют оснащение 0. Аналогично, если
e
a32
1 = 1, мы можем применить одни и те же вторые граф-преобразования к меченым графам G1 и
G2 , а после этого применить еще четвертое граф-преобразование Ωg 4. В результате мы получим,
что вершины v21 и v31 не смежны друг другу. Следовательно, без ограничения общности, мы можем
считать, что e
a22
a33
a32
1 =e
1 = 1, e
1 = 0. Используя последние равенства, мы получаем
0 0 b⊤
0 0 a⊤
0 0 c⊤ = det 0 0 c⊤ =
e
a22
1 = det
e
e
b c D
a c D
1
= det 0
b
0
33
1
e
a1 = det
a
0
0
e
a23
=
det
1
a
(
)
1 0 0⊤
0 b⊤
⊤
0
c
⊤
⊤
0 c + det 0 0 c = 1 + det
= 1,
e
c D
e
e
b c D
c D
(
)
1 0 c⊤
1 a⊤
1 b⊤
⊤
⊤
0 1 b
1 b
= 1 + det
= 1,
= det
e
b D
e
e
c b D
b D
(
)
1 1 b⊤
1 a⊤
⊤
0
c
⊤
⊤
0 c = det 0 0 c = 1 + det
= 0.
e
b D
e
e
c b D
b D
108
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
e 2 )−1 . Имеем
Найдем оставшиеся элементы матрицы A(L
0 1 b⊤
0 1 b⊤
1 1 b⊤
1 1 c⊤ = det 1 0 a⊤ = det 1 0 a⊤ +
e
a11
2 = det
e
e
e
b c D
b c D
b c D
(
)
(
)
(
)
1 1 b⊤
0 a⊤
0 b⊤
0 c⊤
⊤
0 1 c
+ det
= det
+ det
+ det
=
e
e
e
c D
c D
c D
e
b c D
)
(
1 1 b⊤
1 b⊤
+ 1 = 1,
= det 0 0 c⊤ + det
e
b D
e
b c D
0 1 a⊤
1 1 b⊤
1 1 c⊤ = det 1 1 c⊤ = 1,
e
a22
2 = det
e
e
a c D
b c D
0 0 b⊤
0 0 a⊤
0 0 b⊤ = det 0 0 c⊤ = 1,
e
a33
2 = det
e
e
b c D
a b D
(
)
0 1 b⊤
1 1 b⊤
1 1 b⊤
1 b⊤
⊤
⊤
⊤
1
1
c
0
1
c
0
0
c
e
a12
=
det
=
det
=
det
+
det
= 0,
2
e
b D
e
e
e
a c D
b c D
b c D
⊤
⊤
(
)
0 0 b
0 0 b
0 0 b⊤
0 b⊤
13
⊤
⊤
⊤
1 1 c
0 1 c
0 0 c
e
a2 = det
= det
= det
+ det
= 0,
e
c D
e
e
e
a b D
c b D
c b D
0 0 a⊤
0 1 b⊤
1 1 c⊤ = det 0 1 c⊤ = 0,
e
a23
2 = det
e
e
a b D
c b D
j−3
j−3
0 0 1 (b )⊤
0 0 1 (b )⊤
j−3 )⊤
e
a1j
= det 1 1 0 (aj−3 )⊤ =
2 = det 1 1 1 (c
e j−3
e j−3
a b c
D
a b c
D
j−3
(
)
1 0 1 (b )⊤
1 0 (aj−3 )⊤
j−3
⊤
= det 0 1 0 (a ) = det
=e
a2j
a3j
1 +e
1 ,
e
b c Dj−3
e
0 b c
Dj−3
0 1 1 (aj−3 )⊤
0 0 1 (aj−3 )⊤
j−3
1 1 1 (cj−3 )⊤ = det
e
a2j
a3j
1 0 0 (b )⊤ = e
2 = det
1 ,
e
e
a b c Dj−3
a 0 c
Dj−3
0 0 1 (aj−3 )⊤
0 0 1 (aj−3 )⊤
j−3 ⊤
) = det 0 0 0 (cj−3 )⊤ = e
a2j
e
a3j
1 .
2 = det 0 0 1 (b
e
e
a
b
0
D
a b c
Dj−3
j−3
Мы видим, что
0 1 1 0⊤
⊤
e 1 )−1 + E = 1 0 0 f ,
A(L
1 0 0 g⊤
0 f g H
0
0 0 f ⊤ + g⊤
0 0
g⊤
e 2 )−1 + E = 0
.
A(L
⊤
0
0 0
f
f +g g f
H
7. Граф-зацепления
109
РИС. 82. Первый граф Буше дает нереализуемый граф-узел
Легко видеть, что соответствующие вершины имеют структуру как в определении 7.6. Следовательно, меченый граф G2 получается из меченого графа G1 применением последовательности
граф-преобразований Ωg 2, Ωg 3, Ωg 4, Ωg 4′ .
Из теорем 7.4, 7.5 и из определений отображений χ и ψ следует, что эти отображения взаимно
обратны. Следовательно, мы доказали теорему 7.3.
Закончим этот раздел примером нереализуемого граф-узла.
Определение 7.16. Граф-зацепление (гомотопический класс петлевых графов) называется
нереализуемым, если каждый его представитель не реализуем хордовой диаграммой.
Следствие 7.1. Граф-узел F не реализуем, если и только если гомотопический класс χ(F)
не реализуем.
Пусть G — меченый граф, изображенный на рис. 82, каждая вершина которого имеет оснащение
1, а знак выбран произвольным образом.
Следствие 7.2. Граф-узел F, порожденный графом G, не реализуем.
Доказательство. Пусть L = χ(F). Легко видеть, что граф G, рассматриваемый как петлевой граф
без петель, является представителем гомотопического класса L. Следовательно, петлевой граф L
(см. теорему 7.10 и следствие 7.4) и граф-узел F не реализуемы.
7.2.4. Операции разведения и ∆ (дельта) Тураева. Определим операцию разведения для свободных граф-зацеплений. Как обычно, мы сначала переносим определение разведения для оснащенных 4-графов, см. п. 5.5.1, на реализуемые (простые) графы, а потом используем то же самое
определение для всех графов.
Пусть G — произвольный свободный оснащенный (простой) граф, т.е. класс эквивалентности
оснащенных графов по четвертым граф-преобразованиям. Все представители свободного оснащенного графа имеют одинаковое количество вершин, и мы можем установить между множествами
их вершин естественное соответствие. Поэтому имеет смысл говорить о вершине свободного оснащенного графа.
Пусть v — произвольная вершина из G. Рассмотрим два случая. В первом случае существует
представитель H из G, для которого v имеет или оснащение 1, или степень большую, чем 0.
Нетрудно показать, что в этом случае вершина v удовлетворяет тем же самым условиям для любого представителя из G, и существуют два представителя H1 и H2 из G, которые отличаются друг
от друга с помощью граф-преобразования Ωg 4 или Ωg 4′ в вершине v. Под разведением свободного
оснащенного графа G в вершине v мы будем подразумевать любой из двух свободных оснащенных графов, имеющих представители H1 \ {v} и H2 \ {v} соответственно. В реализуемом случае
это означает, что на оснащенном 4-графе существуют поворачивающие обходы, проходящие через
рассматриваемую вершину двумя разными способами. Тогда разведение в вершине оснащенного
4-графа соответствует удалению хорды оснащенной хордовой диаграммы (вершины графа пересечений), соответствующей вершине. Если разведение оснащенного 4-графа приводит к несвязному
графу, то мы можем рассмотреть другой представитель того же самого граф-зацепления. Мы приходим ко второму случаю: вершина v имеет оснащение 0 и является изолированной для какого-то,
110
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 83. Одно из двух разведений в изолированной вершине
а значит и для любого, представителя из G. Пусть H — произвольный представитель из G. Построим новый граф H ′ , который получается из H добавлением к нему новой вершины u с оснащением
0, смежной только с v, см. рис. 83 для реализуемого случая (пунктирная линия изображает поворачивающий обход). В этом случае под разведением свободного оснащенного графа G в вершине v
мы имеем в виду любой из двух свободных оснащенных графов, имеющих представители H \ {v}
и H ′ , соответственно.
Как правило, разведение свободного оснащенного графа в наборе вершин — это какой-то свободный оснащенный граф, полученный последовательным разведением вершин.
Замечание 7.10. Иногда при применении операции разведения могут возникнуть дополнительные вершины, которых не было в первоначальном графе. Мы эти новые вершины не разводим, т.е.
оставляем в новом графе.
Предложение 7.1. Предположим, что G, G ′ — два свободных оснащенных графа, и граф G
может быть получен из G ′ как результат разведения в некоторых вершинах. Тогда, если
граф G ′ реализуем, то и граф G реализуем.
Доказательство. Если граф G ′ реализуем, и граф G получен из графа G ′ применением четвертого
граф-преобразования и/или удалением вершины, то можно нарисовать соответствующий оснащенный 4-граф и взять соответствующее разведение на нем, которое даст нам хордовую диаграмму для
G. В втором случае, если граф G ′ реализуем, то реализуемость графа G следует из леммы 7.1.
Построим операцию ∆. Пусть i > 1 — произвольное натуральное число. Определим множество Z2 Gi как линейное пространство над Z2 , порожденное множеством Gi свободных оснащенных
графов с i компонентами (т.е. для любого G ∈ Gi мы имеем corankZ2 (A(G) + E) = i − 1) профакторизованное по следующим соотношениям:
1) второе граф-преобразование;
2) G = 0, если граф G имеет две вершины с оснащением 0, которые смежны только друг с
другом.
Смысл соотношения из пункта 2) состоит в том, что мы обнуляем свободный оснащенный
граф, если он имеет «незацепленную» с остальными компоненту (см. определение 7.14). Наличие
двух вершин с оснащением 0, которые смежны только друг с другом, в реализуемом случае как
раз и означает, что соответствующее свободное зацепление имеет незацепленную с остальными
уникурсальную компоненту.
Для i = 1 мы определим Z2 G1 аналогично, только факторизовать будем по соотношению из
пункта 1).
Определим отображение ∆ : Z2 G1 → Z2 G2 . Берем свободный оснащенный граф G с
corankZ2 (A(G) + E) = 0 и строим элемент следующим образом. Для каждой вершины v графа
G существуют два способа разведения. Один способ дает свободный оснащенный граф из Z2 G1 , а
другой — свободный оснащенный граф Gv из Z2 G2 . Мы берем только Gv и полагаем
∑
∆(G) =
Gv ∈ Z2 G2 .
v
Легко доказать следующую теорему.
Теорема 7.6. ∆ — корректно определенное отображение из Z2 G1 в Z2 G2 .
Используя основной принцип из п. 7.2.3, мы можем определить, принадлежит ли вершина графа
«одной компоненте» или «различным компонентам» свободного оснащенного графа. А именно,
мы назовем вершину vi свободного оснащенного графа G ориентированной, если corankZ2 (A(G) +
7. Граф-зацепления
111
E) 6 corankZ2 (Bi (G)). Не трудно показать, что corankZ2 Bi (G) ̸= corankZ2 B(G \{vi }), если вершина
vi является ориентированной.
Используя понятие ориентированной вершины, мы можем определить отображение ∆i (итерации
отображения ∆), рассматривая разведения только в ориентированных вершинах и беря только те
разведения, которые имеют больше компонент, чем мы имели на предыдущем шаге.
Следствие 7.3. ∆i является корректно определенным отображением из Z2 G1 в Z2 Gi+1 .
7.3. Четность, минимальность и нетривиальные примеры. В настоящем разделе мы рассмотрим четность для свободных граф-узлов и свободных граф-зацеплений в духе четности из
раздела 5. Поскольку мы построили эквивалентность между множеством граф-узлов и множеством гомотопических классов петлевых графов, достаточно рассмотреть случаи граф-зацеплений
и гомотопических классов петлевых графов.
Рассмотрим категорию свободных гомотопических классов петлевых графов.
Определение 7.17. Для каждого петлевого графа мы назовем вершину v четной, если v смежна с четным числом вершин, отличных от нее самой; в противном случае вершина v называется
нечетной.
Замечание 7.11. В реализуемом случае четность из определения 7.17 совпадает с гауссовой
четностью, см. раздел 5.
Аксиомы четности для оснащенных 4-графов, описанные в п. 5.1, могут быть непосредственно
обобщены на случай петлевых графов (и, следовательно, на случай граф-узлов). Мы это оставляем
в качестве простого упражнения.
Рассматривая движения Рейдемейстера на петлевых графах, мы получаем следующую теорему.
Теорема 7.7. Четность, определенная выше на петлевых графах с помощью четных и
нечетных вершин, удовлетворяет аксиомам четности.
Используя четность, мы можем определить отображение ∆iнечет , где сумма берется по всем
нечетным ориентированным вершинам, и ∆iчет , где сумма берется по всем четным ориентированным вершинам. Мы должны определить понятие четной и нечетной вершины для свободных
оснащенных графов со многими компонентами.
Мы назовем вершину v свободного оснащенного графа G с одной компонентой четной (соотв., нечетной), если вершина, соответствующая вершине v петлевого графа χ(G), четна (соотв.,
нечетна). Рассмотрим свободный оснащенный граф Gv1 ,...,vk−1 с k компонентами, который получается из G разведением свободного оснащенного графа G последовательно в вершинах v1 , . . . , vk−1 ;
где v1 является ориентированной вершиной в G, и vi , i = 2, . . . , k − 1, является ориентированной
вершиной в Gv1 ,...,vi−1 . Назовем ориентированную вершину u графа Gv1 ,...,vk−1 четной относительно разведения в вершинах v1 , . . . , vk−1 (соотв., нечетной относительно разведения в вершинах
v1 , . . . , vk−1 ), если количество ориентированных вершин в Gv1 ,...,vk−1 , которые смежны с u в графе
χ(G), четно (соотв., нечетно).
Замечание 7.12. Мы определили понятие четности вершины только для тех свободных оснащенных графов со многими компонентами, которые получаются из свободных оснащенных графов с одной компонентой. Во-первых, этого достаточно для определения операции итерация
∆iчет(нечет) . Во-вторых, мы это сделали для того, чтобы не усложнять конструкцию, но это можно
сделать и в общем случае.
Предложение 7.2. ∆iнечет — это корректно определенное отображение из Z2 G1 в Z2 Gi+1 .
Рассмотрим другую четность для граф-зацеплений с двумя компонентами.
Определение 7.18. Назовем вершину графа, представляющего двухкомпонентное графзацепление, четной, если она ориентирована, и нечетной в противном случае.
Теорема 7.8. Четность из определения 7.18 удовлетворяет аксиомам четности.
Доказательство следует из определения четности.
112
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Имея построенные четности, мы можем определить скобки: [·] для граф-узлов и {·} для графзацеплений, аналогично п. 5.5.6. Для графа G, представляющего свободный граф-узел (соотв.,
для графа H, представляющего свободное двухкомпонентное граф-зацепление), рассмотрим следующие суммы
∑
∑
[G] =
Gs ∈ Z2 G1 и {H} =
Hs ∈ Z2 G2 ,
s чет.,1 комп.
s чет., нетрив.
где сумма берется по всем разведениям в четных вершинах, и берутся только те слагаемые,
для которых corankZ2 (A(Gs ) + E) = 0. Во второй формуле еще требуется, чтобы Hs не был
эквивалентен никакому простому графу, имеющему две вершины с оснащением 0, которые смежны
только друг другу. Таким образом, если граф G имеет k четных вершин, то [G] будет содержать
не более 2k слагаемых, и, если все вершины графа G являются нечетными, то мы будем иметь
только одно слагаемое, сам граф G. То же самое верно и для графа H и {H}.
Теорема 7.9. Если G и G′ представляют один и тот же свободный граф-узел, то справедливо следующее равенство: [G] = [G′ ]. Если H и H ′ представляют одно и то же двухкомпонентное свободное граф-зацепление, то {H} = {H ′ }.
Доказательство 7.9 дословно повторяет доказательство теоремы 5.9 согласно основному принципу или, быть может, небольшой его модификации
Определение 7.19. Мы назовем меченый граф G (соотв., петлевой граф L) минимальным, если
не существует представителя граф-зацепления, порожденного G (соотв., гомотопического класса
петлевых графов, порожденного L), имеющего строго меньше вершин, чем имеет G (соотв., L).
Теорема 7.10 (ср. с теоремой 5.1). Пусть G (соотв., H) — простой меченый граф, представляющий свободный граф-узел (соотв., двухкомпонентное граф-зацепление), все вершины которого являются нечетными согласно определению 7.17 (соотв., определению 7.18), причем
к G (соотв., H) нельзя применить второе уменьшающее граф-преобразование. Тогда граф G
(соотв., H) минимален.
Используя эту теорему, мы получаем
Следствие 7.4. Граф G, изображенный на рис. 32 слева, представляющий свободный графузел, является минимальным; в частности, соответствующий граф-узел не тривиален и не
реализуем.
Первое утверждение следствия тривиально: мы просто проверяем условия теоремы и получаем, что граф G минимален; для доказательства второго утверждения мы должны обратиться к
доказательству теоремы 7.9, где мы видим, что любой представитель G′ граф-узла F имеет граф
G в качестве своего разведения, т.е. граф G лежит внутри каждого представителя G′ данного граф-узла, и, если граф G не реализуем, то и все графы G′ согласно предложению 7.1 не
реализуемы. Аналогично можно увидеть, что двухкомпонентное свободное граф-зацепление H с
представителем H (оснащение каждой вершины равно 0), показанным на рис. 84, не реализуемо,
т.к. {H} = H. Заметим, что граф H на рис. 84 эквивалентен графу Буше, изображенному справа
на этом рисунке, с помощью граф-преобразования Ω4 ; следовательно, они представляют одно и то
же двухкомпонентное свободное граф-зацепление.
Рассмотрим еще один пример.
Предложение 7.3. Петлевой граф K, изображенный на рис. 76, минимален и не реализуем.
Доказательство состоит из следующих шагов.
∑
Сначала заметим, что ∆(K) состоит из семи слагаемых L + i Li , где только одно слагаемое
(соответствующее вершине x) имеет все нечетные вершины и представляет собой двухкомпонентное свободное граф-зацепление; для каждого из оставшихся слагаем Li существует по крайней
мере одна четная вершина.
Далее, двухкомпонентное свободное граф-зацепление, порожденное графом L, имеет представитель, изображенный на рис. 84; все вершины имеют оснащение 0. Для доказательства последнего
факта нужно последовательно совершить следующие операции над K: сначала мы разводим граф
7. Граф-зацепления
113
=
РИС. 84. Двухкомпонентное свободное граф-зацепление
1
4
5
4
x
1
5
Удаляем вершину x
и меняем обход в
вершине 1
6
3
6
2
3
=
2
(петлевой граф, т.е. все вершины
<<проходятся>> трансверсально)
4
4
6
5
1
6
5
1
Меняем обход в
вершинах 2 и 3
2
2
3
2
3
2
3
3
(в вершине 1 мы имеем
поворачивающий обход,
остальные проходятся
трансерсально)
(в вершинах 1, 2 и 3 мы имеем
поворачивающий обход, остальные
проходятся трансерсально)
Меняем обход в
вершинах 5 и 6
6
4
5
6
=
5
3
4
1
2
Локальное дополнение в
вершине 4 (получаем
поворачивающий обход)
1
2
3
(везде поворачивающий обход,
кроме вершины 4)
3
5
2
=
4
4
4
6
(поворачивающий обход; оснащение каждой
вершины равно 0)
1
РИС. 85. Двухкомпонентное свободное граф-зацепление
K в вершине x (это может быть сделано только после смены обхода с помощью некоторой вершины отличной от x, т.к. первоначально мы имели гауссов обход, а он не может задавать зацепление);
после этого мы должны сменить обход во всех других вершинах, чтобы получить поворачивающий. Все шаги показаны на рис. 85 (можно было воспользоваться отображением из теоремы 7.3 и
сразу получить конечный граф, но мы ∑
решили проделать все преобразования для наглядности).
Рассмотрим скобку {∆(K)} = L + i {Li }. Заметим, что все граф-зацепления, порожденные
слагаемыми {Li }, имеют представитель с количеством вершин строго меньше шести, так как
каждый граф Li имеет по крайней мере одну четную вершину; с другой стороны, граф-зацепление,
порожденное L, не имеет представитель, количество вершин которого меньше шести; итак, этот
элемент L не уничтожается в сумме. Так как граф L не реализуемый, то свободный оснащенный
узел K тоже не реализуем.
7.4. Обобщение скобки Кауфмана и другие инварианты. Теоремы минимальности. Мы
уже имели дело с теоремой минимальности для граф-зацеплений, см. теорему 7.10. В данном
114
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
разделе мы рассмотрим теоремы минимальности для граф-зацеплений, основанные на обобщении скобки Кауфмана для граф-зацеплений. Обобщим скобку Кауфмана и некоторые понятия на
случай граф-зацеплений.
Пусть s ⊂ V(G) — произвольное подмножество множества вершин V(G) меченого графа G.
Обозначим через G(s) подграф графа G с множеством вершин V(G(s)) = s и множеством ребер
E(G(s)) таким, что {u, v} ∈ E(G(s)), где u, v ∈ s, если и только если {u, v} ∈ E(G).
Определение 7.20. Мы назовем подмножество из V(G) состоянием для графа G. A-состояние
— это состояние, состоящее только из вершин графа G с метками (a, −), a ∈ {0, 1} (нет вершин
с метками (b, +), b ∈ {0, 1}). Аналогично, B-состояние — это состояние, состоящее только из
вершин графа G с метками (b, +) (нет вершин с метками (a, −)).
Противоположное состояние для состояния s — это множество вершин, являющееся дополнительным до множества s в множестве всех вершин графа (противоположное состояние к Aсостоянию — это B-состояние). Два состояния называются соседними, если они различаются
только в одной вершине, которая принадлежит одному из этих состояний и не принадлежит
другому. Расстояние между двумя состояниями — это число вершин, в которых эти состояния
различаются. Мы определим число окружностей в состоянии s как число corankZ2 A(G(s)) + 1.
Скобка Кауфмана меченого графа G — это полином (Лорана)
∑
⟨G⟩(a) =
aα(s)−β(s) (−a2 − a−2 )corankZ2 A(G(s)) ,
s
где сумма берется по всем состояниям s графа G, α(s) равно количеству вершин с метками (a, −)
из s и вершин с метками (b, +) из V(G) \ s, β(s) = |V(G)| − α(s).
Теорема 7.11. Скобка Кауфмана меченого графа инвариантна при Ωg 2 − Ωg 4′ графпреобразованиях и умножается на (−a±3 ) при Ωg 1 граф-преобразовании.
Определение 7.21. Определим полином Джонса для меченого графа G, для которого
corankZ2 (A(G) + E) = 0, как XG (a) = (−a)−3w(G) ⟨G⟩(a).
Замечание 7.13. Полином Джонса можно определить для произвольного граф-зацепления, но
для этого сначала надо определить понятие «ориентированного» граф-зацепления. Для простоты
изложения мы не будем этого делать в этой монографии.
Теорема 7.12. Полином Джонса является инвариантом граф-узлов.
Основные результаты, касающиеся теорем минимальности в классическом случае, следуют из
хорошо известной теоремы Кауфмана-Мурасуги -Тистлтуэйта.
Теорема 7.13 ([176, 200]). Длина полинома Джонса-Кауфмана для зацеплений со связной
тенью и n классическими перекрестками меньше или равна 4n. Равенство достигается только для альтернированных диаграмм без точек распадения или для связных сумм таких диаграмм.
Напомним, что точкой распадения связной виртуальной диаграммы называется такой ее перекресток v, что при удалении соответствующей вершины v ′ из остова Γ соответствующего атома
этот остов распадется на более чем одну связную компоненту.
В [131] теорема 7.13 была обобщена на случай виртуальных диаграмм. Оценка span⟨K⟩ 6 4n
может быть усилена span⟨K⟩ 6 4n − 4g, где g — род соответствующего атома.
Используя теорию атомов, нетрудно видеть, что альтернированные диаграммы зацепления —
это те диаграммы, которые имеют нулевой род атома (более точно, диаграмма имеет нулевой род,
если она связная сумма нескольких альтернированных диаграмм).
Для виртуальных диаграмм мы имеем понятие квазиальтернированной диаграммы [131]. Это
диаграмма виртуального зацепления, получающаяся из альтернированной диаграммы классического зацепления виртуализацией некоторых перекрестков и применением движения объезда.
Определение 7.22. Редуцированной диаграммой называется связная диаграмма виртуального
зацепления, не имеющая точек распадения.
Обобщим понятия, введенные выше, на случай граф-зацеплений.
7. Граф-зацепления
115
Определение 7.23. Назовем меченый граф G, имеющий n вершин, альтернированным, если
k + l = n + 2, где k — это число окружностей в A-состоянии s1 , т.е. k = corankZ2 A(G(s1 )) + 1, а
l — это число окружностей в B-состоянии s2 графа G, т.е. l = corankZ2 A(G(s2 )) + 1.
Назовем меченый граф G адекватным, если число k окружностей в A-состоянии локально
минимально, т.е. не существует соседнего состояния для A-состояния с k + 1 окружностью, и то
же самое верно для числа окружностей в B-состоянии.
Замечание 7.14. Определение адекватного графа обобщает (см., напр., [201]) классическое
определение адекватной диаграммы: никакая окружность в A-состоянии и никакая окружность в
B-состоянии не распадается на две окружности после одного разведения.
Из определения альтернированного графа сразу следует следующее
Утверждение 7.2. Оснащение каждой вершины альтернированного графа равно нулю.
Определение 7.24. Меченый граф называется нераспадающимся, если он не имеет изолированных вершин.
Определение 7.25. Для меченого графа G определим род атома как 1 − (k + l − n)/2, где k
и l равны количествам окружностей в A-состоянии s1 и B-состоянии s2 графа G соответственно,
т.е. k = corankZ2 A(G(s1 )) + 1 и l = corankZ2 A(G(s2 )) + 1.
Отметим, что это число согласуется с родом атома в обычном случае: мы используем равенство
χ = 2 − 2g, где χ — это эйлерова характеристика, и подсчитываем χ, используя число вершин n,
число ребер 2n и количество 2-ячеек (окружности A-состояния и окружности B-состояния).
Утверждение 7.3. Меченый граф является альтернированным, если и только если род его
атома равен 0.
Лемма 7.6. Для любого меченого графа G, имеющего n вершин, мы имеем
span⟨G⟩ 6 4n − 4g(G),
где g(G) — род соответствующего атома.
Доказательство. Действительно, утверждение этой леммы следует из определений скобки Кауфмана и рода атома. Обозначим число окружностей в A-состоянии графа G через k, и обозначим
число окружностей в B-состоянии графа G через l.
Легко видеть, что никакое состояние не может содержать монома, имеющего степень выше, чем
старшая степень монома в A-состоянии, и никакое состояние не может содержать монома степени
ниже, чем младшая степень монома в B-состоянии.
В максимальном состоянии рассмотрим старший моном степени n + 2(k − 1), а в минимальном
— младший моном степени −n − 2(l − 1).
Очевидно, что длина скобки Кауфмана ⟨L⟩ не превосходит 2n + 2(k + l − 2).
Учитывая, что g(G) = 1 − (k + l − n)/2, получаем требуемое.
Лемма 7.7. Для адекватного меченого графа G, имеющего n вершин, мы имеем
span⟨G⟩ = 4n − 4g(G),
где g(G) — род соответствующего атома.
Доказательство. Действительно, достаточно проверить, что старший моном, происходящий из
A-состояния графа G, не сокращается с мономом, происходящим из другого состояния (те же
самые рассуждения могут быть применены к младшему моному, происходящему из B-состояния).
Рассмотрим моном aα(s)−β(s) (−a2 )corankZ2 A(G(s)) для состояния s. Для A-состояния мы имеем
α = n, β = 0, corankZ2 A(G(s)) = k − 1. Если мы рассмотрим соседнее к A-состоянию состояние s,
то α уменьшится на 1, β увеличится на 1 и, следовательно, степень монома aα−β уменьшится на
два. Мы можем компенсировать это уменьшение только увеличением числа corankZ2 A(G(s)) на
1. Это может произойти только в случае, когда существует соседнее к A-состоянию состояние se с
corankZ2 A(G(e
s)) = k. Существование такого состояния противоречит адекватности диаграммы.
Мономы, соответствующие другим состояниям, имеют степень не больше степени монома, соответствующего состоянию s. Отсюда получаем утверждение леммы.
116
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
3
-
2
+
7
-
1 +
6
+ 4
5
РИС. 86. Граф Буше BW3
Лемма 7.8. Альтернированный меченый граф G является адекватным, если и только если
он является нераспадающимся.
Доказательство. Импликация ⇒ очевидна.
Предположим теперь, что граф G является альтернированным, нераспадающимся, но не является адекватным. Обозначим число окружностей в A-состоянии через k и в B-состоянии через l. Без
ограничения общности, мы можем считать, что существует состояние s, для которого α(s) = n − 1,
β(s) = 1 и corankZ2 A(G(s)) = k. Рассмотрим состояние se, противоположное состоянию s. Очевидно, что число окружностей в состоянии se равно l − 1 (суммарное число не может превосходить
k + l). Обозначим вершину графа G, в которой A-состояние отличается от состояния s, через v.
Таким образом, меченый граф G′ , полученный из меченого графа G сменой знака вершины v,
имеет также нулевой род.
Поскольку граф G является альтернированным, все состояния, имеющие одну окружность, находятся на одном и том же расстоянии от A-состояния. С другой стороны, все эти же состояния
находятся на одном и том же расстоянии от состояния s. Это означает, что либо все состояния с
одной окружностью содержат вершину v, либо все они не содержат вершину v.
Предположим, что все эти состояния содержат вершину v. Покажем, что вершина v является
изолированной. Действительно, если бы существовала вершина w, которая смежна вершине v, то,
начиная со состояния с одной окружностью, содержащем вершину v, и меняя его в вершинах v и
w, мы бы получили другое состояние с одной окружностью, которое не содержит вершины v. Это
завершает доказательство.
Леммы 7.6, 7.7, 7.8 дают следующую теорему.
Теорема 7.14. Альтернированный нераспадающейся меченый граф является минимальным.
Доказательство. Пусть G — альтернированный нераспадающейся меченый граф, имеющий n
вершин. Предположим противное, что существует граф G′ , имеющий n′ вершин и n′ < n. Мы
имеем 4n = span⟨G⟩ = span⟨G′ ⟩ 6 4n′ − 4g(G′ ), где g(G′ ) — род атома графа G′ . Получаем
противоречие.
Пример 7.2. Рассмотрим граф BW3 , изображенный на рис. 86, состоящий из семи вершин:
i-ая вершина смежна с j-ой, если и только если i − j ≡ ±1 (mod 6), i, j = 1, . . . , 6, и 7-ая
смежна с 2, 4, 6. Пометим все четные вершины (0, +), а нечетные — (0, −). Граф BW3 является
альтернированным. По теореме 7.14, граф BW3 минимален. Мы не знаем, реализуемо или нет
граф-зацепление, порожденное BW3 . Мы предполагаем, что не реализуемо. По крайней мере мы
знаем, что это граф-зацепление не имеет представителя, имеющего меньше семи вершин.
8.
ГОМОЛОГИИ ХОВАНОВА
ДЛЯ КЛАССИЧЕСКИХ УЗЛОВ, ВИРТУАЛЬНЫХ УЗЛОВ И ГРАФ-ЗАЦЕПЛЕНИЙ
Построение М. Г. Ховановым [109] нового инварианта узлов стало одним из наиболее значительных продвижений в теории узлов на рубеже XX и XXI веков. Между гомологиями Хованова
и полиномом Джонса имеется связь, аналогичная связи между гомологиями многообразия и его
эйлеровой характеристикой. В этом смысле гомологии Хованова являются усилением полинома
8. Гомологии Хованова
117
РИС. 87. Диаграмма левого трилистника с ориентированными перекрестками
L
L0
L1
РИС. 88. Правило разведения ориентированного перекрестка
Джонса и представляют собой мощный инвариант узлов и зацеплений: как показали недавно
Кронхаймер и Мрувка [118], гомологии Хованова распознают тривиальный узел.
Конструкцию Хованова можно также рассматривать как функтор между категорией оснащенных
кобордизмов одномерных многообразий и категорией цепных комплексов. Такая интерпретация
расширяет связь между топологической квантовой теорией поля и теорией узлов и открывает
дорогу возможным многомерным обобщениям инварианта Хованова.
Переход от полиномиального инварианта узла к гомологическому (так называемая категорификация) был осуществлен и для других полиномов, помимо Джонса. Так, были определены
гомологии Хованова-Розанского [113, 114, 115] , категорифицирующие полином HOMFLY, и гомологии Хегора-Флоера [184, 186] — категорификация полинома Александера.
Первые обобщения гомологий Хованова на случай виртуальных узлов были произведены
в [131, 136, 141], причем в нескольких вариантах. Были определены гомологии с коэффициентами в Z2 для всех виртуальных узлов, а также целочисленные гомологии для виртуальных узлов,
которым соответствуют ориентируемые атомы, и были предложены способы сведения произвольных виртуальных узлов к ориентированным. Определение целочисленных гомологий Хованова для
всех виртуальных зацеплений (атомы которых не обязательно ориентируемы) было дано в работах [159, 145].
Ожват, Расмуссен и Сабо в работе [183], модифицировав комплекс Хованова, получили новый
инвариант зацеплений, который они назвали нечетными гомологиями Хованова. Нечетные гомологии Хованова, как и обычные (четные) гомологии, категорифицируют полином Джонса. Нечетная
и четная теории совпадают, если в качестве основного поля взять Z2 .
Напомним кратко определение нечетных гомологий Хованова. Пусть имеется диаграмма классического зацепления. На каждом перекрестке диаграммы произвольным образом вводится ориентация (добавляются стрелки), как показано на рисунке 87.
В соответствии с ориентированным правилом разведения (рис. 88), каждое состояние диаграммы (т.е. один из возможных способов разведения всех перекрестков) представляет собой набор
окружностей и стрелок между ними.
Состояния диаграммы можно рассматривать как вершины дискретного куба {0, 1}n , где 0 соответствует положительному разведению перекрестка, а 1 — отрицательному. Мы можем ориентировать одномерные ребра куба в направлении от состояния со всеми положительными разведениями
к состоянию со всеми отрицательными разведениями. В случае трилистника куб состояний выглядит, как показано на рисунке 89.
∧
Сопоставим каждой вершине куба состояний s внешнюю алгебру ∗ V (s), где V (s) — свободный Z-модуль, порожденный окружностями состояния s. Прямая сумма внешних алгебр по всем
состояниям образует пространство цепей нечетных гомологий Хованова. Дифференциал комплекса
Хованова ∂ представляет собой сумму частичных дифференциалов, каждый из которых действует
вдоль некоторого ребра куба.
118
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
РИС. 89. Куб ориентированных состояний для диаграммы трилистника
c
a
S
b
S’
РИС. 90
Вид частичного дифференциала ∂ss′ , который действует вдоль ребра, направленного от состояния
s к состоянию s′ , определяется тем, как изменяются окружности состояния при изменении разведения. Если при переходе от s к s′ две окружности сливаются в одну, дифференциал определяется
по формуле
∧∗
∂ss′ (u) = u, u ∈
V (s),
где, допуская вольность в обозначениях, мы предполагаем, что элемент u представлен в виде
некоторого полинома от образующих, а его образ — в виде того же полинома от образующих (т.е.
окружностей) пространства V (s′ ), в которые переходят образующие (окружности) состояния s.
Если же при переходе по ребру одна окружность c распадается в две a и b (см. рис. 90), то
дифференциал задается формулой
∧∗
∂ss′ (u) = (b − a) ∧ u, u ∈
V (s).
∧
В формуле окружности a и b рассматриваются как образующие модуля V (s) ⊂ ∗ V (s). Более
подробно, если элемент u имеет вид u = u1 + c ∧ u2 , где полиномы u1 , u2 не содержат образующей
c, то
∂ss′ (u) = (b − a) ∧ u1 + b ∧ a ∧ u2 .
Общий дифференциал комплекса определяется как сумма частичных:
∑
∂=
ϵ(e)∂ss′ .
e=s→s′
Здесь ϵ — это некоторая расстановка знаков, то есть отображение, сопоставляющее каждому
ребру число 1 или −1. Использование расстановки знаков необходимо для получения тождества
∂ 2 = 0. Заметим, что другим необходимым условием для получения тождества является коммутативность либо антикоммутативность частичных дифференциалов (т.е. (анти)коммутативность
двумерных граней куба состояний), что в данном случае непосредственно⊕
проверяется.
∧
Нечетные гомологии Хованова определяются как гомологии комплекса s ∗ V (s) с дифференциалом ∂. Оказывается, что они не зависят от выбора расстановки знаков и выбора ориентации
перекрестков диаграммы.
Дж. Блум в работе [20] предложил другую конструкцию комплекса, вычисляющего (приведенные) нечетные гомологии Хованова. Он показал, что в качестве образующих модулей V (s)
(более точно, приведенного варианта данных модулей), лежащих в основе определения цепей
комплекса, можно брать перекрестки диаграммы зацепления, и что соотношения между новыми
8. Гомологии Хованова
119
образующими однозначно определяются ориентированной матрицей смежности графа пересечений
диаграммы. Поскольку граф пересечений не меняется при мутациях, нечетные гомологии Хованова оказываются инвариантными относительно мутаций [20], и также можно ожидать, что их
удастся перенести на граф-зацепления. На самом деле, конструкция Блума в случае характеристики 2 дословно переносится на уровень граф-зацеплений. Этот инвариант можно рассматривать
как определение обычных гомологий Хованова граф-зацеплений, так как для зацеплений теории
нечетных и обычных гомологий Хованова совпадают по модулю 2. С другой стороны, как показал
С. Верли [225], целочисленные гомологии Хованова не сохраняются при мутациях, что исключает
возможность прямого определения соответствующего инварианта для граф-зацеплений. Поскольку
вопрос об инвариантности гомологий Хованова относительно мутаций узлов остается открытым,
существование конструкции гомологий для граф-узлов представляет предмет для дальнейших исследований.
8.1. Гомологии Хованова граф-зацеплений с коэффициентами в Z2 . Пусть G — (простой)
меченый граф с n вершинами, и A = A(G) = (aij ) – его матрица смежности. Далее мы формулируем Z2 -версию конструкции Блума нечетных гомологий Хованова. Причина использования
коэффициентов Z2 заключается в том, что цепной комплекс в конструкции Блума определяется
по элементам матрицы смежности A, которые лежат в Z2 .
Рассмотрим подмножество s множества вершин V = V(G) графа G. Напомним, что мы называем подмножества множества вершин V состояниями (по аналогии с разведениями диаграммы
зацепления при построении скобки Кауфмана или обычного комплекса Хованова). Пусть G(s)
— подграф в G, порожденный множеством вершин s, и обозначим A(s) = A(G(s)). Рассмотрим
векторное пространство
V (s) = Z2 ⟨x1 , . . . , xn | r1s , . . . , rns ⟩
с образующими x1 , . . . , xn и соотношениями r1s , . . . , rns , где соотношения заданы формулой
∑
aij xj , если vi ̸∈ s,
xi +
{j | vj ∈s}
s
∑
ri =
aij xj ,
если vi ∈ s.
{j | vj ∈s}
Размерность пространства V (s) равна числу corank Z2 A(s).
Между состояниями и вершинами n-мерного куба {0, 1}n имеется естественная биекция, учитывающая метки графа: состоянию s отвечает вектор (α1 , . . . , αn ), где полагаем αi = 0, если vi ∈ s
и sgnvi = 1 (т.е. знак вершины положителен), либо vi ̸∈ s и sgnvi = −1 (т.е. знак вершины отрицателен). В противном случае считаем, что αi = 1. Любое ребро куба тогда связывает состояния s и
s ⊕ i, где состояние s ⊕ i равно s ∪ {vi }, если vi ̸∈ s, и равно s \ {vi }, если vi ∈ s. Будем обозначать
такое ребро как s → s ⊕ i. Направление ребра определяется так, чтобы выполнялось vi ̸∈ s, если
sgn(vi ) = −1, и vi ∈ s, если sgn(vi ) = 1.
∧
∧∗
s :
Каждому ребру s → s ⊕ i мы сопоставляем линейное отображение ∂s⊕i
V (s) → ∗ V (s ⊕ i)
внешних алгебр, заданное формулой
{
xi ∧ u если xi = 0 ∈ V (s),
s
∂s⊕i (u) =
u
если xi ̸= 0 ∈ V (s).
Рассмотрим градуированное векторное пространство
⊕ ∧∗
V (s)
C(G) =
s⊂V
и отображение на нем
∂(u) =
∑
∂ss′ (u).
{s,s′ ⊂V | s→s′ }
Утверждение 8.1. Отображение ∂ корректно определено и задает на C(G) структуру цепного комплекса.
s
определены корректно (т.е. перевоДоказательство. Необходимо показать, что отображения ∂s⊕i
s
дят соотношения ri в соотношения) и что каждая двумерная грань куба состояний коммутативна
(тогда будет выполняться тождество ∂ 2 = 0).
120
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Нам потребуются следующие две технические леммы.
Лемма 8.1. Рассмотрим состояние s и индекс i такой, что vi ̸∈ s. Без ограничения общности можно считать, что
(
)
A a
,
A(s ⊕ i) =
a⊤ α
где A = A(s). В этом случае имеем
(
)
A
1. xi = 0 ∈ V (s) тогда и только тогда, когда rank Z2 A = rank Z2
;
⊤
(
) a
(
)
A
A a
2. xi = 0 ∈ V (s ⊕ i) тогда и только тогда, когда rank Z2
+ 1 = rank Z2
.
a⊤
a⊤ α
∑
aij xj следует равенство xi = 0 ∈ V (s), которое ознаДоказательство. Из условия xi =
{j | vj ∈s}
чает, что вектор a⊤ линейно зависит от строк матрицы смежности A. Таким образом, первое
утверждение леммы истинно.
⊤
Из равенства xi = 0 ∈ V (s ⊕ i) следует, что вектор
выражается через строки
(0 1) линейно
(
)
A a
A a
матрицы A(s ⊕ i). Тогда rank Z2
= rank Z2 a⊤ α . Но
a⊤ α
0⊤ 1
(
)
A a
A 0
A
⊤
⊤
a
α
a
0
rank Z2
= rank Z2
= rank Z2
+ 1.
a⊤
0⊤ 1
0⊤ 1
(
)
A a
Лемма 8.2. Если rank Z2
= rank Z2 A + 1 для симметрической матрицы A, то
a(⊤ α )
A
справедливо равенство rank Z2
= rank Z2 A.
a⊤
(
)
(
)
A
A a
=
̸
rank
A.
Тогда
rank
=
Доказательство. Предположим, что rank Z2
Z2
Z2
⊤
a⊤
(
)
(
)
( a) α
A
A
a
rank Z2
, и вектор
линейно зависит от столбцов матрицы rank Z2
. Следоα
a⊤
a⊤
вательно, вектор a зависит от столбцов матрицы A и (после применения
транспозиции)
вектор
(
)
A
a⊤ линейно зависит от строк матрицы A. Тогда rank Z2 A = rank Z2
, что противоречит
a⊤
начальному предположению.
Утверждение 8.2. Для любого s и любого индекса i справедливы утверждения
1. dim V (s ⊕ i) = dim V (s) + 1 тогда и только тогда, когда xi = 0 ∈ V (s) и xi ̸= 0 ∈ V (s ⊕ i);
2. dim V (s ⊕ i) = dim V (s) − 1 тогда и только тогда, когда xi ̸= 0 ∈ V (s) и xi = 0 ∈ V (s ⊕ i);
3. dim V (s ⊕ i) = dim V (s) тогда и только тогда, когда xi = 0 ∈ V (s) и xi = 0 ∈ V (s ⊕ i).
Случай xi ̸= 0 ∈ V (s) и xi ̸= 0 ∈ V (s ⊕ i) не реализуется.
В переводе на геометрический язык, условие xi = 0 ∈ V (s) эквивалентно тому, что при изменении у состояния s типа сглаживания в i-м перекрестке проходящая через данный перекресток
окружность разбивается в две.
Доказательство. Предложение следует из лемм 8.1, 8.2 и равенств dim V (s) = corank Z2 A(s),
dim V (s ⊕ i) = corank Z2 A(s ⊕ i).
Например, пусть xi ̸= 0 ∈ V (s) и xi =
̸ 0 ∈ V (s ⊕ i). Без ограничения можно считать,
)
(
A
что vi ̸∈ V (s). Тогда, используя обозначения леммы 8.1, мы имеем rank Z2 A ̸= rank Z2
a⊤
)
)
(
)
(
(
A
A a
A
= rank Z2 A +
. Следовательно, rank Z2
+ 1 ̸= rank Z2
и rank Z2
⊤
⊤
a⊤
a
α
a
8. Гомологии Хованова
1O
xi
/2
O
xj
xj
0
xi
1
−1
O
/ −2
O
1
/1
121
xj
1
0
1
Тип 1
/ −1
xj
0
1
/0
O
xj
0
xi
xi
−1
O
/1
/ −1
/0
O
xj
1
1
1
Тип 3
Тип 2
1O
/0
O
1
1O
0
Тип 4
/ −1
1
Тип 5
РИС. 91. Типы четных двумерных граней в кубе состояний
(
1 и rank Z2
(
A
rank Z2
a⊤
A
⊤
a
)
)
(
= rank Z2
A a
a⊤ α
)
(
)
A a
. Но тогда rank Z2
= rank Z2 A + 1 и
a⊤ α
= rank Z2 A по лемме 8.2. Противоречие.
Мы будем называть первые два случая утверждения четными, а третий случай — нечетным.
s
Из определения дифференциала следует, что в нечетном случае ∂s⊕i
= 0.
На языке диаграмм зацеплений и их разведений, четный случай соответствует перестройке диаграммы в перекрестке, при которой две окружности переходят в одну или наоборот, а нечетный
случай (который возникает только у диаграмм виртуальных зацеплений, атом которых неориентируем) — перестройке одной окружности в одну.
∧∗
s :
8.1.1.
Корректность частичных дифференциалов. Рассмотрим отображение ∂s⊕i
V (s) →
∧∗
V (s ⊕ i). Нужно проверить, что соотношения переводятся в соотношения, т.е. что для любого
элемента u и любого индекса j найдутся элементы uk ∈ V (s ⊕ i) такие, что
∑
s
rks⊕i ∧ uk ∈ V (s ⊕ i).
∂s⊕i
(rjs ∧ u) =
k
Для любого индекса j мы имеем rjs = rjs⊕i + αxi при некотором α ∈ Z2 . Если xi = 0 ∈ V (s ⊕ i),
то
s
∂s⊕i
(rjs ∧ u) = rjs ∧ u′ = rjs⊕i ∧ u′ + αxi ∧ u′ = rjs⊕i ∧ u′
в пространстве V (s ⊕ i), где u′ = u или u′ = 0. Если xi ̸= 0 ∈ V (s ⊕ i), тогда xi = 0 ∈ V (s),
s
∂s⊕i
(rjs ∧ u) = xi ∧ rjs ∧ u = xi ∧ rjs⊕i ∧ u + αxi ∧ xi ∧ u = rjs⊕i ∧ (xi ∧ u).
s
В любом случае отображение ∂s⊕i
определено корректно.
8.1.2. Коммутативность двумерных граней. Покажем, что частичные дифференциалы коммутируют между собой, то есть что любая двумерная грань в кубе состояний коммутативна.
Любая двумерная грань куба состояний имеет вид
∧∗
V (s ⊕ j)
O
s⊕j
∂s⊕i⊕j
∧
/ ∗
V (s ⊕ i ⊕ j)
s
∂s⊕j
∧∗
V (s)
s
∂s⊕i
/
∧∗
O
(8.1)
s⊕i
∂s⊕i⊕j
V (s ⊕ i).
Относительно изменения размерности пространств V (s′ ), s′ = s, s ⊕ i, s ⊕ j, s ⊕ i ⊕ j диаграммы
без нечетных ребер можно разбить на пять типов (см. рис. 91).
122
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Здесь число в вершине квадрата, соответствующей состоянию s′ , равно разности dim V (s′ ) −
dim V (s) = corank Z2 A(s′ )−corank Z2 A(s), а метка z = 1, xi , xj на ребре, отвечающем отображению
′
′
∂ss′′ , означает, что ∂ss′′ (u) = z ∧ u.
Двумерные грани типов 1, 2, 3 очевидно коммутативны. Любая грань типа 4 является коммутативной, поскольку xi = xj = 0 ∈ V (s ⊕ i ⊕ j). Для грани типа 5 нужно показать, что
xi = xj ∈ V (s ⊕ i ⊕ j). С точностью до перенумерации переменных есть три возможных случая.
1. sgn(vi ) = sgn(vj ) = −1. Тогда vi , vj ∈ s ⊕ i ⊕ j. Без ограничения общности, можно считать,
что vi и vj — это последние вершины состояния s ⊕ i ⊕ j. Матрицу смежности A(s ⊕ i ⊕ j) можно
записать в виде
A a b
a⊤ α γ ,
(8.2)
b⊤ γ β
где A = A(s).
Так как corank
Z2 A(s
(
) ⊕ i) = corank Z2 A(s) − 1, то xi = 0 ∈ V (s ⊕ i). Тогда строки матрицы
A a
A(s ⊕ i) =
порождают вектор (0⊤ 1). Следовательно, строки матрицы A(s ⊕ i ⊕ j)
a⊤ α
порождают вектор (0⊤ 1 δ), δ ∈ Z2 . Если δ = 0, то xi = 0 ∈ V (s ⊕ i ⊕ j), что невозможно. Тогда
δ = 1, и мы получаем соотношение xi + xj = 0 в пространстве V (s ⊕ i ⊕ j).
2. sgn(vi ) = −1, sgn(vj ) = 1. Тогда vi ∈ s ⊕ i ⊕ j и vj ̸∈ s ⊕ i ⊕ j. Мы можем считать, что матрица
смежности A(s ⊕ i) имеет вид (8.2), где A = A(s ⊕ j).
Имеет место равенство xi = 0 ∈ A(s ⊕ i). Из него вытекает, что вектор (0⊤ 1 0) является
линейной комбинацией строк матрицы смежности A(s ⊕ i). Если коэффициент в данной
( линейной
)
A a
⊤
комбинации при строке (b γ β) равен нулю, то строки матрицы A(s ⊕ i ⊕ j) =
a⊤ α
порождают вектор (0⊤ 1). Таким образом, xi = 0 ∈ V (s ⊕ i ⊕ j), что приводит к противоречию. По
этой причине коэффициент при (b⊤ γ β) равен 1. Тогда вектор (b⊤ γ + 1) порождается строками
матрицы A(s ⊕ i ⊕ j), что означает xi + xj = 0 ∈ V (s ⊕ i ⊕ j).
3. sgn(vi ) = sgn(vj ) = −1. Тогда матрица A(s) имеет вид (8.2), где A = A(s ⊕ i ⊕ j). Равенство
xi + xj = 0 ∈ V (s ⊕ i ⊕ (
j) отвечает
a⊤ + b⊤ . Поскольку rank Z2 A(s) =
) вектору-соотношению
(
)
A a
A a b
rank Z2 A(s ⊕ j) = rank Z2
= rank Z2
, последняя строка матрицы A(s)
⊤
a
α
a⊤ α γ
выражается через остальные строки. Если коэффициент при строке (a⊤ α γ) в соответствующей
(
)
линейной комбинации равен нулю, то вектор (b⊤ γ β) зависит от строк матрицы A a b ,
а вектор b⊤ — от строк матрицы A. Следовательно, xj = 0 ∈ V (s ⊕ i ⊕ j), что неверно. Таким
образом, коэффициент при (a⊤ α γ) нулю не равен, так что вектор a⊤ + b⊤ порождается строками
матрицы A, что означает xi + xj = 0 ∈ V (s ⊕ i ⊕ j).
Так как отображения, отвечающие нечетным ребрам куба состояний, являются нулевыми, нужно проверить коммутативность только двух типов двумерных граней, содержащих нечетные ребра:
1O
1
/0
O
xj
−1
O
0
0
0
Тип 6
/0
xi
/0
O
1
0
0
0
/0
.
Тип 7
Диаграмма типа 6 коммутативна, так как dim V (s ⊕ i) = dim V (s ⊕ i ⊕ j), так что xj = 0 ∈
V (s ⊕ i ⊕ j).
Для установления коммутативности диаграммы типа 7 необходимо доказать, что xi = 0 ∈
V (s ⊕ i ⊕ j). Предположим, что это на так.
Пусть sgn(vi ) = sgn(vj ) = −1. Тогда
матрица смежности имеет вид (8.2). Так как xj = 0 ∈
(
)
A a
A a
⊤ α
a
V (s ⊕ i), мы имеем rank Z2
= rank Z2
. Тогда вектор b⊤ линейно зависит от
a⊤ α
⊤
b
γ
8. Гомологии Хованова
(
123
)
(
)
A
. Но rank Z2
= rank Z2 A, значит b⊤ зависит от строк матрицы A.
a⊤
(
)
A
С другой стороны, выполняется равенство xj ̸= 0 ∈ V (s), откуда rank Z2
̸= rank Z2 A. Мы
b⊤
получили противоречие.
Случаи, когда вершины имеют другие знаки, рассматриваются аналогично.
Таким образом, утверждение 8.1 доказано.
строк матрицы
A
a⊤
Определение 8.1. Гомологии Kh(G) комплекса (C(G), ∂) назовем приведенными (нечетными)
гомологиями Хованова меченого графа G.
Основной результат настоящего раздела состоит в том, что гомологии Хованова являются корректно определенным инвариантом граф-зацеплений.
Теорема 8.1. Гомологии Хованова Kh(G) инвариантны относительно движений Ωg 1 − Ωg 4′ .
e — граф, получающийся из G
Доказательство. Пусть G есть произвольный меченый граф, и G
′
при помощи одного из движений Рейдемейстера Ωg 1 − Ωg 4 .
Инвариантность относительно Ωg 1.
e получается из графа G добавлением изолированной вершины v. Комплекс C(G)
e изоПусть G
морфен произведению комплексов C(G) ⊗ C(v), где комплекс C(v) равен
x∧ / ∧∗
Z2 ⟨x⟩ ,
Z2
если sgn(v) = −1, и равен
∧∗
x=0
Z2 ⟨x⟩
/ Z2 ,
если sgn(v) = 1. В любом случае, H∗ (C(v)) = Z2 · 1, где 1 ∈ H0 (C(v)) при sgn(v) = 1, и 1 ∈
H1 (C(v)) при sgn(v) = −1. Таким образом, мы получаем
e = Kh(G) ⊗ Kh(v) ∼
Kh(G)
= Kh(G).
Инвариантность относительно Ωg 2.
e получается добавлением вершин v и w, причем sgn(v) = 1, sgn(w) =
Предположим, что граф G
e записывается в
−1 . Без ограничения общности, можно считать, что матрица смежности A(G)
одной из двух следующих форм
0 0 a⊤
1 1 a⊤
0 0 a⊤
1 1 a⊤ .
или
a a A(G)
a a A(G)
В обоих случаях, для любой вершины s ∈ V(G) выполняются равенства corank Z2 A(G(s)) =
e
e ∪ {v})) = corank Z A(G(s
e ∪ {w})) = corank Z A(G(s
e ∪ {v, w})) − 1.
corank Z2 A(G(s)),
corank Z2 A(G(s
2
2
e записанном
Эти соотношения определяют вид верхнего и левого отображений в комплексе C(G),
в форме
Cvw
O
1
x2
Cv
/ Cw
O
(8.3)
∂
∂
/ C.
Здесь пространство Cv содержит цепи, состояние которых включает вершину v, но не включает
вершину w; пространства цепей C (не содержащих v и w), Cw (содержащих w, но не v), Cvw
(включающих как v, так и w) определяются аналогично.
Для каждого
∑ состояния s из Cvw определим линейную функцию f : V (s) → Z2 при помощи
формулы f ( λi xi ) = λ1 +λ2 . Функция f корректно определена, так как она обращается в нуль на
i
∧
∧
∧
любом соотношении: f (ris ) = ai1 + ai2 = 0, так как ai1 = ai2 . Тогда ∗ V (s) = ∗ ker f ⊕ x2 ∗ V (s)
124
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
и Cvw = X ⊕ x2 Cvw . Подкомплекс X → Cw стягиваемый. Следовательно, гомологии комплекса
e равны гомологиям факторкомплекса
C(G)
(8.4)
x2 CO vw
x2
Cv
/ C.
∂
Данный факторкомплекс после факторизации по подкомплексу C также является стягиваемым.
e имеет те же гомологии, что и комплекс C = C(G).
Таким образом, комплекс C(G)
Инвариантность относительно Ωg 3.
Без ограничения общности можно считать, что вершины u, v, w, участвующие в третьем двиe Матрицы смежности графов G и G
e
жении Рейдемейстера, имеют номера 1, 2, 3 в V(G) = V(G).
имеют вид
0 1 1 0⊤
0
0 0 (a + b)⊤
1 0 0 a⊤
0
0 0
a⊤
e
.
A(G) =
⊤
1 0 0 b⊤ , A(G) = 0
0 0
b
a+b a b
B
0 a b B
e
Обозначим Ve (s) = V (G(s)).
Тогда для любого состояния s ⊂ V(G)\{u, v, w} имеем V (s) ∼
= Ve (s),
V (s ⊕ v) ∼
= Ve (s ⊕ v), V (s ⊕ w) ∼
= Ve (s ⊕ w), V (s ⊕ v ⊕ w) ∼
= Ve (s ⊕ u ⊕ v) ∼
= Ve (s ⊕ u ⊕ w),
∼ Ve (s ⊕ u), V (s ⊕ u ⊕ v) =
∼ V (s ⊕ u ⊕ w) =
∼ V (s), причем соответствующие
V (s ⊕ u ⊕ v ⊕ w) =
изоморфизмы внешних алгебр перестановочны с дифференциалом.
e в форме куба:
Запишем комплексы C(G) и C(G)
C
? uw
O
/ Cuvw
? O
1
CO u
x1
C
1
Cw
?
1
euvw
C
O
/ Cuv
O
/ Cv
e
C
? uv
O
/ Cvw
?
x1
evw
C
1/
euw
C
O
e
? Cv
ew
/C
e
/C
? Ou
(8.5)
e
/ C.
?
Для каждого
∑ состояния s из Cu рассмотрим линейную функцию f : V (s) → Z2 , заданную
формулой
f
(
∧∗
∧ i λi xi ) = λ∧1 . Функция корректно определена и индуцирует разложения пространств
V (s) = ∗ ker f ⊕ x1 ∗ V (s) и Cu = X ⊕ x1 Cu . Рассмотрим подкомплекс
C
? uw
O
1
/ Cuvw
? O
1
X
/ Cuv
O
Cw
Cv
/ Cvw .
?
Факторкомплекс C → x1 Cu является стягиваемым, так что гомологии комплекса C(G) изоморфны гомологиям рассматриваемого подкомплекса. Подкомплекс содержит стягиваемую часть
X → ∂(X). Отображения X → Cuv и X → Cuw являются изоморфизмами, так что после факторизации мы получим комплекс
/ Cuvw
(8.6)
Cuw
O ?
? O
?????
Cuv
O
Cw
Cv
где пространства Cuv и Cuw отождествляются.
/ Cvw ,
?
8. Гомологии Хованова
125
e к комплексу (для состояний s из C
euvw нужно
Аналогичные рассуждения сводят комплекс C(G)
∑
определить функцию f : Ve (s) → Z2 при помощи формулы f ( i λi xi ) = λ1 + λ2 + λ3 ).
euv
C
O ?
???
euw
C
O
ev
C
ew
C
e
/C
? Ou
(8.7)
/ C.
?
Оба построенных комплекса изоморфны комплексу Cv ⊕ Cw → C ⊕ Cvw → Cuvw . Таким образом,
e совпадают.
гомологии комплексов C(G) и C(G)
Инвариантность относительно Ωg 4.
Заметим, что в реализуемом случае, когда граф G является графом пересечений поворачивающего обхода диаграммы зацепления, инвариантность относительно движений Ωg 4 и Ωg 4′ очевидна,
поскольку диаграмма зацепления при этом не меняется, и нечетный комплекс Хованова, в своей
геометрической формулировке, остается тем же самым. Нам остается проверить, что инвариантность относительно Ωg 4 сохраняется и для не реализуемых графов.
e
Пусть вершины u и v, участвующие в движении Ωg 4, имеют номера p и q в V (G) = V (G).
e
Коэффициенты матриц смежности A(G) = (aij ) и A(G) = (e
aij ) связаны соотношением
{
aij + aip ajq + aiq ajp , {i, j} ∩ {p, q} = ∅,
e
aij =
aij ,
{i, j} ∩ {p, q} ̸= ∅.
e действующее на состояниях по формуле
Рассмотрим отображение ϕ : C(G) → C(G),
s ∪ {u, v}, {u, v} ∩ s = ∅,
s \ {u, v}, {u, v} ∩ s = {u, v},
ϕ(s) =
s,
{u, v} ∩ s ̸= ∅, {u, v},
а также линейные отображения Φ : V (s) → Ve (ϕ(s)),
xi ,
xq ,
Φ(xi ) =
xp ,
заданные формулой
i ̸= p, q,
i = p,
i = q.
Отображение Φ является изоморфизмом линейных пространств и, после соответствующего рас∧
∧
ширения до изоморфизма внешних алгебр ∗ V (s) → ∗ Ve (ϕ(s)), задает изоморфизм градуироe Отображение Φ является цепным отображением
ванных линейных пространств Φ : C(G) → C(G).
e а также их гомологии изоморфны.
комплексов. Следовательно, комплексы C(G) и C(G),
Инвариантность относительно Ωg 4′ .
Пусть вершина v, участвующая в движении Ωg 4′ , имеет номер p. Коэффициенты матриц смежe = (e
ности A(G) = (aij ) и A(G)
aij ) связаны соотношением
aij + aip ajp , i, j ̸= p,
aip ,
j = p,
e
aij =
apj ,
i = p.
e действующее на множестве состояний, формулой
Определим отображение ϕ : C(G) → C(G),
ϕ(s) = s ⊕ p,
а линейные отображения Φ : V (s) → Ve (ϕ(s)) — формулой Φ(xi ) = xi , 1 6 i 6 n. Отображения Φ
e так что гомологии комплексов совпадают.
задают изоморфизм комплексов C(G) и C(G),
Следствие 8.1. Гомологии Хованова Kh(G) являются инвариантом граф-зацеплений.
126
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Пример 8.1. Рассмотрим граф Буше W5 (рис. 32 слева), все вершины которого помечены (0, +). Гомологии Хованова данного помеченного графа G были вычислены Дж. Блумом:
Kh1 (G) = Kh2 (G) = Kh4 (G) = Kh5 (G) = Z2 , Kh3 (G) = Z2 ⊕ Z2 , остальные группы гомологий равны нулю. Отсюда, в частности, следует, что граф-зацепление G нетривиально. Выше (см.
следствие 7.4) с использованием четности был доказан более сильный факт — нереализуемость
граф-зацепления G.
8.2. Целочисленные нечетные гомологии Хованова граф-зацеплений. Определение целочисленных нечетных гомологий Хованова для граф-зацеплений сталкивается с проблемой, что знаки
целочисленной матрицы пересечений ориентированной хордовой диаграммы, вообще говоря, не
сохраняются при мутациях. Однако возможность контролировать изменение знаков появляется,
когда мы можем различать внешние и внутренние хорды диаграммы. По этой причине следует
ограничиться рассмотрением двудольных графов. Имеется также другое ограничение, связанное
требованием, чтобы ориентация графа была согласована с движениями Рейдемейстера, — главная
унимодулярность [24]. Таким образом, целочисленные нечетные гомологии Хованова определяются для двудольных главно унимодулярных граф-зацеплений.
Двудольные главно унимодулярные граф-зацепления можно рассматривать в качестве «классических» граф-зацеплений, поскольку реализуемые графы такого типа соответствуют графам пересечений классических (не виртуальных) диаграмм зацеплений. Вопрос в том, является ли данный класс граф-зацеплений «естественным» определением классических граф-зацеплений. Другой
проблемой является вопрос о существовании нереализуемых двудольных главно унимодулярных
граф-зацеплений.
8.2.1. Главно унимодулярные двудольные граф-зацепления. В настоящем параграфе мы определяем ориентированную версию движений Рейдемейстера ориентированных двудольных графов.
Пусть G — ориентированный двудольный граф без петель и кратных ребер с n вершинами и
V = V(G) — множество его вершин. Мы предполагаем, что G является меченым графом, причем
оснащение каждой вершины равно 0. Другими словами, задано только отображение sgn : V →
{−1, 1} (знак вершины).
Занумеруем вершины графа G в некотором порядке. Матрица смежности A(G) = (aij )i,j=1,...,n
ориентированного графа G определяется как целочисленная матрица с элементами aij = 1 и
aji = −1, если vi является началом, а vj концом ребра в графе G, соединяющего эти две вершины
(мы будем использовать в этом случае обозначение vi → vj ) , и aij = 0, если vi и vj не являются
соседними вершинами. Кроме того, мы имеем aii = 0 для каждого i = 1, . . . , n.
Подмножество множества вершин s ⊂ V, как и выше, называется состоянием. Определим G(s)
как подграф в G, порожденный множеством вершин s, и обозначим A(s) = A(G(s)). Поскольку
граф G двудольный, множество вершин можно представить в виде объединения двух непересекающихся подмножеств V = V0 ⊔ V1 , так что для любого состояния s матрица A(s) имеет блочный
вид
(
)
0
B(s)
A(s) =
,
−B(s)⊤
0
где строки матрицы B(s) соответствуют вершинам из s ∩ V0 , а столбцы отвечают вершинам из
подмножества s ∩ V1 .
Определим движения Рейдемейстера на меченых ориентированных двудольных графах. Как
и введенные в предыдущей главе движения Рейдемейстера на неориентированных графах, они
получаются как результат изменения графов пересечения хордовых диаграмм после применения к
последним обычных движений Рейдемейстера; затем определение распространяется и на случай
нереализуемых графов.
Движение R. Для произвольной вершины v ∈ V(G) мы меняем направление ребер, инцидентных
вершине v.
Движение Ω1 . Первое движение Рейдемейстера заключается в добавлении/удалении изолированной вершины со знаком + или −.
Движение Ω2 . Второе движение Рейдемейстера представляет собой добавление/удаление двух
несмежных вершин u и v с противоположными знаками и одинаковыми окрестностями, так чтобы
8. Гомологии Хованова
127
получившийся граф оставался двудольным. Мы требуем при этом, чтобы направления добавляемых ребер были согласованы: если для некоторой вершины w ∈ V(G) мы имеем u → w (соответственно, u ← w), то v → w (соответственно, v ← w).
Движение Ω3 . Третье движение Рейдемейстера определяется следующим образом. Пусть u, v, w
— три вершины графа G, имеющие знак ’-’, такие что вершина u смежна только v и w, причем
u → v и u → w. Тогда мы удаляем ребра, соединяющие u с v и w. Мы добавляем ребра u → t
(соответственно, u ← t) для всех вершин t, таких что v → t (соответственно, v ← t), и добавляем
ребра u → t (соотв. u ← t), если w ← t (соотв. w → t). Кроме того, мы меняем знак у вершин v и
w на ’+’. Обратное преобразование также назовем третьим движением Рейдемейстера.
Движение Ω4 . Четвертое движение Рейдемейстера определяется следующим образом. Мы выбираем произвольные смежные вершины u со знаком a и v со знаком b. Затем мы меняем метку
вершины u на −b, а вершины v — на −a, а также меняем направление ребра uv. Помимо этого, мы меняем смежность произвольной пары вершин (t, w), такой что t ∈ N (u) и w ∈ N (v).
Ориентация новых ребер вида tw выбирается так, чтобы квадрат utwv был четным, то есть число сонаправленных ребер относительно некоторого обхода цикла utwv было четным (см. пример
ниже).
uO
/v
to
w
четный квадрат
uO
/v
O
/w
t
тоже четный квадрат
uO
/v
/w
t
нечетный квадрат
Оказывается, что сформулированное выше определение движения Ω4 позволяет произвольно
менять ориентацию ребер графа; при этом используются вспомогательные вершины, добавляемые
при помощи увеличивающего движения Ω2 .
e отличается
Утверждение 8.3. Пусть G — ориентированный двудольный меченый граф, и G
e можно получить из графа G применением
от графа G ориентацией ребер. Тогда граф G
движений Ω2 и Ω4 .
Доказательство. Пусть u и v — две смежные вершины в графе G. Мы можем поменять направление ребра, соединяющего вершины u и v, следующим образом. Добавим две новые вершины
w, w′ , так что N (w) = N (w′ ) = {v} (движение Ω2 ). Затем добавим еще две вершины t, t′ , так
что N (t) = N (t′ ) = {u, w} и квадрат uvwt был нечетным (снова движение Ω2 ). Обозначим получившийся граф как G′ . Применим дважды движение Ω4 к паре вершин w, t. В новом графе G′′
смежность вершин такая же, как в графе G′ , и совпадают направления всех ребер, за исключением ребра uv, которое меняет направление, так как квадрат uvwt в графе G′′ является четным.
После этого удалим при помощи второго движения вершины w, w′ , t, t′ , получив, таким образом,
граф G′′′ , отличающийся от графа G только направлением ребра uv.
e
Повторяя данную операцию необходимое число раз, мы получим граф G.
Доказанное утверждение показывает, что теория ориентированных двудольных графов с движениями R, Ω1 , . . . , Ω4 является на самом деле теорией неориентированных помеченных двудольных
графов с движениями Рейдемейстера обычных граф-зацеплений, сохраняющих двудольную структуру графов. Это означает, что необходимо наложить дополнительное условие, чтобы ориентация
графов была существенной.
Определение 8.2. Пусть G — двудольный меченый граф. Назовем ориентацию графа G главно
унимодулярной, если для каждого состояния s ⊂ V определитель det A(s) (над Z) равен либо 0,
либо 1. Граф G с такой ориентацией назовем PU-ориентированным.
Любой двудольный граф, реализуемый в виде графа пересечения некоторой хордовой диаграммы, является PU-ориентированным [23]. Обратное утверждение неверно, например, следующий
128
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
граф Θ является PU-ориентированным, но не реализуем:
@·
/·
·=
==
==
==
·
/·
/·
/·
/·
==
==
==
=
/·
/·
@
/·
Действительно, любой собственный главный минор матрицы смежности равен 0 или 1, так как
любой собственный подграф в Θ реализуем, а определитель всей матрицы смежности равен нулю,
поскольку в Θ нет совершенных паросочетаний. С другой стороны, рассмотрим один из трех
циклов в Θ. Этот подграф является графом пересечений некоторой хордовой диаграммы, причем
диаграмма определена однозначно. Нетрудно проверить, что данную диаграмму нельзя дополнить
до диаграммы с графом пересечений Θ.
Существуют двудольные графы, которые не являются PU-ориентируемыми. Например, используя утверждение 8.6 ниже, легко проверить, что на графе Буше BW3 (рис. 86) нельзя ввести
главно унимодулярную ориентацию. Татт показал [217], что граф BW3 является единственным
препятствием к PU-ориентируемости; то есть произвольный двудольный граф не является PUориентируемым тогда и только тогда, когда, применяя к нему шарнирные преобразования, можно
получить граф, содержащий BW3 в качестве подграфа.
Вопрос о том, существует ли PU-ориентированный граф, который нельзя движениями Рейдемейстера преобразовать в реализуемый граф, остается открытым.
Наряду со свойством главной унимодулярности, можно рассматривать более сильное свойство
полной унимодулярности, когда все миноры матрицы равны 0, 1 или −1. Для матриц смежности
двудольных графов, как показывает сформулированная ниже лемма, эти свойства эквивалентны.
Лемма 8.3. Пусть G — ориентированный двудольный меченый граф. Следующие утверждения равносильны:
1. граф G является PU-ориентированным;
2. любой минор матрицы A(G) равен 0, −1 или 1;
3. любой минор матрицы B(G) равен 0, −1 или 1.
Доказательство. 1 ⇒ 3. Пусть B — некоторая подматрица в матрице B(G). Обозначим через
s0 ∈ V0 множество вершин, соответствующих строкам матрицы B, а s1 ∈ V1 — множество вершин,
соответствующих столбцам матрицы B. Тогда
(
)
0
B
A(s0 ∪ s1 ) =
,
−B ⊤ 0
так что det A(s0 ∪ s1 ) = (det B)2 = 0 или 1. Следовательно, det B = 0, 1 или −1.
3 ⇒ 2. Пусть C — квадратная подматрица в A(G). В соответствии с разложением V = V0 ⊔ V1
матрицу C можно записать в блочном виде
(
)
0
B1
C=
.
−B2⊤ 0
Если блоки B1 и B2 не являются квадратными, то ранг матрицы C меньше, чем размер матрицы C,
так что det C = 0. Если же блоки квадратные, то det C = ± det B1 det B2 = 0, −1 или 1, поскольку
det B1 , det B2 = 0, −1 или 1.
Переход 2 ⇒ 1 очевиден.
Следующее утверждение показывает, что свойство главной унимодулярности хорошо себя ведет
относительно движений Рейдемейстера и, таким образом, может рассматриваться как свойство
ориентированных граф-зацеплений.
Утверждение 8.4. Пусть двудольный граф G PU-ориентирован. Тогда
1. любой подграф в G PU-ориентирован;
8. Гомологии Хованова
129
2. если граф G′ получается из G применением движений R, Ω1 , Ω3 , Ω4 , то граф G′ PUориентирован.
Доказательство. Первое утверждение очевидно.
Покажем, что PU-ориентация сохраняется при движении R. Матрица смежности A(G′ ) получается из матрицы A(G) умножением на −1 строки и столбца, соответствующих вершине v, участвующей в движении R. Тогда для любого состояния s ∈ V мы имеем det A(G′ (s)) = det A(G(s)),
если v ̸∈ s, и det A(G′ (s)) = (−1)2 det A(G(s)) = det A(G(s)), если v ∈ s. Таким образом, все
миноры равны 0, −1 или 1, так что граф G′ PU-ориентирован.
Движение Ω1 . Предположим, что граф G′ получен добавлением изолированной вершины v.
Тогда для любого состояния s ∈ V(G′ ) справедливы равенства det A(G′ (s)) = 0, если v ∈ s, и
det A(G′ (s)) = det A(G(s)), если v ̸∈ s. Поэтому G′ PU-ориентирован.
Движение Ω3 . Без ограничения общности можно считать, что вершины u, v, w, участвующие в
движении, имеют номера 1, 2, 3 в множестве V(G) = V(G′ ). Тогда матрицы смежности имеют вид
0
0
0 a ⊤ − b⊤
0
1
1 0⊤
−1 0
0
0
a⊤
0 a⊤
e = 0
.
, A(G)
A(G) =
⊤
⊤
−1 0
0
0
0
b
0 b
b − a −a −b
C
0 −a −b C
Действительно, покажем, что вектор a⊤ − b⊤ является вектором смежности вершины u в графе G′ . Рассмотрим произвольную вершину t в графе G, и пусть p — номер вершины. Введем
обозначение для коэффициентов матриц смежности A(G) = (aij )i,j=1,...,n , A(G′ ) = (a′ij )i,j=1,...,n .
Если вершина t не соединена ребром с вершинами v и w, то a2p = a3p = 0 и a′1p = 0, так что
a′1p = a2p − a3p . Если вершина t смежна с v, но не w, то a3p = 0 и a′1p = a2p = a2p − a3p . Если
t смежна с w, но не с v, то a2p = 0 и a′1p = −a3p = a2p − a3p . Если вершина t соединена с
обеими вершинами v и w, то a2p = a3p и a′1p = 0 = a2p − a3p . Случай a2p = 1, a3p = −1 (или
a2p = −1, a3p = 1) невозможен, поскольку тогда мы бы имели have
0
1 1 0
−1 0 0 1
A(G({u, v, w, t})) =
−1 0 0 −1
0 −1 1 0
где det A(G({u, v, w, t})) = 4, так что граф G не был бы PU-ориентированным.
Для любого состояния s ∈ V \ {u, v, w} справедливы тождества det A(G(s)) = det A(G′ (s)),
det A(G(s∪{v})) = det A(G′ (s∪{v})), det A(G(s∪{w})) = det A(G′ (s∪{w})), det A(G(s∪{v, w})) =
det A(G′ (s ∪ {v, w})). Кроме того, выполняются равенства det A(G(s ∪ {u})) = 0, det A(G(s ∪
{u, v})) = det A(G(s∪{u, w})) = det A(G(s)), det A(G(s∪{v, w})) = det A(G′ (s∪{u, v})) = A(G′ (s∪
{u, w})), det A(G(s ∪ {u, v, w})) = det A(G′ (s ∪ {u})) и det A(G′ (s ∪ {u, v, w})) = 0.
Таким образом, все миноры det A(G(s)), s ∈ V, равны некоторым минорам матрицы смежности
графа G′ и наоборот. Следовательно, граф G PU-ориентирован тогда и только тогда, когда G′
PU-ориентирован.
Движение Ω4 . Без ограничения общности можно считать, что u ∈ V0 , v ∈ V1 и u → v, где u, v —
вершины, принимающие участие в движении Ω4 . Мы можем также предположить, что u является
первой вершиной в нумерации множества V0 , а v — первой вершиной в V1 . Тогда матрица B(G)
имеет вид
)
(
1 c⊤
.
B(G) =
d B1
Прибавляя или вычитая первую строку матрицы B(G) из остальных строк, мы получим матрицу
(
)
⊤
1
c
e=
B
e1 .
0 B
e
Элементы подматрицы B1 равны 0, ±1, так как иначе матрица B(G) содержала бы минор
1 1 e
e
−1 1 = 2. Пусть D1 — произвольная квадратная подматрица в B1 , а D — подматрица в B, получающаяся из D1 добавлением первой строки и первого столбца. Тогда det D1 = det D = 0, ±1,
130
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
поскольку D переводится преобразованиями строк в соответствующую квадратную подматрицу
e1 = det B. Матрица B
e1 также может быть получена прибавленив B(G). В частности, det B
ем/вычитанием столбца d из столбцов матрицы B1 .
Матрица B(G′ ) имеет вид
(
)
−1 c⊤
e1 .
d B
Рассмотрим произвольную квадратную подматрицу D в B(G′ ). Если D не содержит ни первого
e1 , так что det D = 0, ±1. Если D
столбца, ни первой строки, то D является подматрицей в B
включает первую строку, но не первый столбец, она сводится преобразованием строк к подматрице в B(G). Если D включает первый столбец, но не включает первую строку, то ее можно
преобразовать к подматрице в B(G) посредством операций над столбцами. Если
)
(
−1 (c′ )⊤
,
D=
d′
C
то при помощи операций над строками она преобразуется к матрице
)
(
−1 (c′ )⊤
,
e
0
C
e совпадает с подматрицей в B1 . Следовательно, det D = − det C
e = 0, ±1.
где C
′
Таким образом, любой минор матрицы B(G ) равен 0, ±1, и значит, по лемме 8.3 граф G′
PU-ориентирован.
Семейство PU-ориентированных графов не замкнуто относительно второго движения Рейдемейстера. По этой причине мы определяем главно унимодулярное второе движение Рейдемейстера
ΩP2 U , требуя, чтобы результат преобразования был PU-ориентированным графом.
Определение 8.3. Назовем PU-ориентированным граф-зацеплением класс эквивалентности
произвольного PU-ориентированного графа относительно движений R, Ω1 , ΩP2 U , Ω3 , Ω4 .
Рассмотрим некоторые свойства PU-ориентированных графов.
Следующее утверждение обосновывает введение главной унимодулярности в определение ориентированных граф-зацеплений, поскольку оно гарантирует, что при преобразованиях Рейдемейстера
не могут появиться нечетные квадраты. Как мы видели выше (утверждение 8.3), появление нечетных квадратов обесценивает роль ориентации графа.
Утверждение 8.5. Пусть G — ориентированный двудольный меченый граф. Тогда G является PU-ориентированным тогда и только тогда, когда никакой граф, G′ , полученный из G
применением движения Ω4 , не содержит нечетных квадратов (циклов длины 4).
Доказательство. необходимость вытекает из утверждения 8.4.
Предположим, что применяя движение Ω4 к G, мы не получим нечетных квадратов. Далее
мы будем называть такой граф стабильно четным. Рассмотрим состояние s ⊂ V и обозначим
si = s ∩ Vi , i = 0, 1. Если #s0 ̸= #s1 , то det A(s) = 0. Так что будем считать #s0 = #s1 = k.
Покажем, что det A(s) = (det B(s))2 = 0 или 1 посредством индукции по параметру k.
При k = 1 утверждение очевидно выполняется. Если k = 2, то det B(s) = 0, ±1, потому что в G
нет нечетных квадратов.
Согласно предположению индукции, для любого стабильно четного графа G′ и подмножеств
вершин s′i ∈ Vi (G′ ), i = 1, 2, таких что #s′0 = #s′1 < k, мы имеем det B(G′ (s′0 ∪ s′1 )) = 0, ±1.
Если матрица B(s) нулевая,
B(s) = 0. В противном случае без ограничения общности
)
( то det
1 c⊤
. Тогда применим движение Ω4 к первой вершине u в s0
можно считать, что B(s) =
d B1
и первой вершине(v в s1 . Обозначим
полученный граф через G′ . Обозначим также s′ = s \ {u, v}.
)
−1 c⊤
e
Тогда B(G′ (s)) =
e1 , где det B1 = det B(s) (см. доказательство инвариантности в утверd B
e1 = B(G′ (s′ )), G′ является стабильно четным и
ждении 8.4 относительно движения Ω4 ). Но B
e1 = 0, ±1.
#s′ = #s′ < #s0 = #s1 = k. Следовательно, det B(s) = det B
0
1
8. Гомологии Хованова
131
Таким образом, для каждого состояния s в G мы имеем det B(s) = 0, ±1, так что граф G
PU-ориентирован, согласно лемме 8.3.
Определение 8.4. Цикл C в ориентированном графе называется примитивным, если C =
G(V(C)), т.е. любые две вершины, не являющиеся соседними в цикле C, не смежны в G. Цикла
C называется четным, если число сонаправленных ребер в цикле четно. В противном случае,
цикл называется нечетным.
Утверждение 8.6. Пусть G — PU-ориентированный двудольный граф. Тогда любой примитивный цикл в G является четным.
Доказательство. Рассмотрим примитивный цикл C. Если длина l цикла C равна 4, то C —
это квадрат, и значит, четный. При l > 4 мы выбираем любые две соседние вершины u и v на
цикле C и применяем к ним движение Ω4 . В полученном графе цикл C разбивается в сумму
четного квадрата, содержащего вершины u и v, и примитивного цикла C ′ длины l − 2. Новый
примитивный цикл имеет ту же четность, что и цикл C. После повторения данной процедуры
l/2 − 2 раз, цикл C превратится в квадрат, который будет четным, согласно предложению 8.5.
Следовательно, исходный цикл C является четным.
Следствие 8.2. Любые две PU-ориентации двудольного графа G переводятся одна в другую
при помощи движений R.
Доказательство. Разность между двумя PU-ориентациями задает коцикл c в H 1 (G, Z2 ). Согласно
утверждению 8.6 коцикл c обнуляется на любом примитивном цикле. С другой стороны, примитивные циклы порождают группу H1 (G, Z2 ), так что c = 0. Тогда c = dα, α ∈ C 0 (G, Z2 ). Это
значит, что одна из рассматриваемых PU-ориентаций может быть получена из другой посредством
применения движения R к вершинам v, обладающим свойством α(v) ̸= 0.
Таким образом, теория PU-ориентированных граф-зацеплений является на самом деле теорией
PU-ориентируемых граф-зацеплений. Мы будем называть двудольные графы, допускающие PUориентацию, главно унимодулярными графами (или PU-графами) и назовем соответствующие
граф-зацепления PU-граф-зацеплениями.
Перейдем к определению нечетных гомологий Хованова для главно унимодулярных графзацеплений.
8.2.2. Нечётные гомологии Хованова PU-граф-зацеплений. Пусть G — PU-ориентированный
двудольный меченый граф с n вершинами, а A = A(G) — его матрица смежности.
Пусть s ⊂ V = V(G). Рассмотрим модуль
V (s) = Z⟨x1 , . . . , xn | r1s , . . . , rns ⟩,
где соотношения r1s , . . . , rns заданы формулой
∑
sgn(vj )aij xj , если vi ∈
̸ s,
xi −
{j | vj ∈s}
s
∑
ri =
sgn(vj )aij xj , если vi ∈ s
−
(8.8)
{j | vj ∈s}
Обозначим матрицу соотношений через A = (aij )i,j=1,...,n , aij = −sgn(vj )aij ,. Пусть A′ — про′
извольная подматрица в A(G). Обозначим через A соответствующую подматрицу (т.е. подматрицу с тем же множеством строк и столбцов, что и в A′ ) в матрице A. Тогда верны равенства
′
′
rank Z A′ = rank Z A и corank Z A′ = corank Z A .
Основным техническим следствием из свойства главной унимодулярности является следующее
утверждение.
Утверждение 8.7. Для любого состояния s Z-модуль V (s) является свободным.
Доказательство. Модуль V (s) не имеет кручения тогда и только тогда, когда для любого k идеал
Ek (s) ⊂ Z, порожденный всеми минорами коранга k в матрице соотношений A(s), равен 0 или Z.
Но по лемме 8.3 все миноры в матрице A равны 0 либо ±1, и значит, любой минор в A равен 0
или ±1.
132
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Ранг модуля V (s) совпадает с corank Z A(s) = corank Z A(s).
Имеется естественное взаимно-однозначное соответствие между состояниями s ⊂ V и вершинами n-мерного куба {0, 1}n . Каждое ребро куба имеет вид s → s ⊕ i, где s ⊕ i обозначает состояние
s ∪ {vi }, если vi ̸∈ s, и состояние s \ {vi }, если vi ∈ s. Мы ориентируем ребро таким образом, чтобы
vi ̸∈ s, если sgn(vi ) = −1, и vi ∈ s, если sgn(vi ) = 1.
∧∗
∧
s :
Каждому ребру s → s ⊕ i поставим в соответствие отображение ∂s⊕i
V (s) → ∗ V (s ⊕ i)
внешних алгебр, заданное формулой
{
xi ∧ u, если xi = 0 ∈ V (s),
s
∂s⊕i (u) =
u,
если xi ̸= 0 ∈ V (s).
Здесь элемент u рассматривается как полином ∧
от образующих и в таком
∧∗виде может рассматри∗
ваться в качестве элемента как внешней алгебры
V (s), так и алгебры
V (s⊕i). Корректность
отображения, то есть независимость результата от представления u в виде полинома показана ниже.
Лемма 8.4. xi = 0 ∈ V (s) тогда и только тогда, когда corank Z A(s ⊕ i) = corank Z A(s) + 1
Доказательство. Случай 1: sgn(vi ) = −1. Тогда vi ̸∈ s и s ⊕ i = s ∪ {vi }. Матрица соотношений
для состояния s ⊕ i (с точностью до нумерации вершин) имеет вид
(
)
A(s) −a
A(s ⊕ i) =
.
a⊤
0
∑
и мы имеем xi =
aij xj . Равенство xi = 0 означает, что строка a⊤ линейно зависит
{j | vj ∈s}
(
)
A(s)
от строк матрицы A(s). Это эквивалентно равенству rank Z (A(s)) = rank Z
. Поэтому
a⊤
rank Z A(s) 6 rank Z A(s ⊕ i) 6 rank Z A(s) + 1. Но ранги матриц A(s) и A(s ⊕ i) являются четными, так как rank Z A(s) = rank Z A(s), rank Z A(s ⊕ i) = rank Z A(s ⊕ i), а матрицы A(s) и A(s ⊕ i)
кососимметричны. Следовательно, rank Z A(s ⊕ i) = rank Z A(s) и rank Z A(s ⊕ i) = rank Z A(s) + 1
Случай 2: sgn(vi ) = 1. Тогда vi ∈ s и s ⊕ i = s \ {vi }. Матрица смежности состояния s (при
должной нумерации вершин) имеет вид
(
)
A(s ⊕ i) −a
A(s) =
.
a⊤
0
(
)
A(s ⊕ i) −a
Так как vi ∈ S, равенство xi = 0 означает, что ранги матриц
и
a⊤
0
A(s ⊕ i) −a
a⊤
0 совпадают. Но
0
1
A(s ⊕ i) −a
A(s ⊕ i) 0
0
1 > rank Z A(s ⊕ i) + 1.
rank Z
a⊤
0 = rank Z
⊤
a
0
0
1
Следовательно, rank Z A(s) = rank Z A(s ⊕ i) + 2 и corank Z A(s ⊕ i) = corank Z A(s) + 1.
Рассуждения выше можно обратить, так что условие на коранг матриц является критерием для
равенства xi = 0.
С геометрической точки зрения, условие xi = 0, как и в рассмотенном выше случае коэффициентов Z2 , означает, что при замене разведения в i-м перекрестке окружность состояния, проходящая
через данный перекресток, распадается на две окружности.
Следствие 8.3. xi = 0 ∈ V (s) тогда и только тогда, когда xi ̸= 0 ∈ V (s ⊕ i).
Утверждение 8.8 (Корректность определения
дифференциалов). Для любого со∧∗ частичных
∧
s :
стояния s и номера i отображение ∂s⊕i
V (s) → ∗ V (s ⊕ i) корректно определено.
8. Гомологии Хованова
133
Доказательство. Достаточно проверить, что для любого элемента u и индекса j найдутся элементы uk ∈ V (s ⊕ i) такие, что
∑
s
∂s⊕i
(rjs ∧ u) =
rks⊕i ∧ uk ∈ V (s ⊕ i).
k
Для любого j имеем
rjs
=
rjs⊕i
+ αj xi при некотором αj ∈ Z. Если xi = 0 ∈ V (s ⊕ i), то
s
∂s⊕i
(rjs ∧ u) = rjs ∧ u = rjs⊕i ∧ u + αj xi ∧ u = rjs⊕i ∧ u
в V (s ⊕ i). Если xi ̸= 0 ∈ V (s ⊕ i), то
s
∂s⊕i
(rjs ∧ u) = xi ∧ rjs ∧ u = xi ∧ rjs⊕i ∧ u + αj xi ∧ xi ∧ u = ±rjs⊕i ∧ (xi ∧ u).
s
корректно определено.
В любом случае, отображение ∂s⊕i
∧∗
∧
s :
Замечание 8.1. Для любого состояния s и индекса i отображение ∂s⊕i
V (s) → ∗ V (s ⊕ i)
имеет следующие свойства:
∧
s
1. если rank Z V (s ⊕ i) = rank Z V (s) − 1, то ∂s⊕i
эпиморфизм, ядро которого равно xi ∗∧
V (s);
s
2. если∧rank Z V (s⊕i) = rank Z V (s)+1, то отображение ∂s⊕i задает изоморфизм модулей ∗ V (s)
и xi ∗ V (s ⊕ i).
Как было отмечено в начале настоящего раздела, для построения корректно определенного дифференциала комплекса в виде суммы (со знаками) частичных дифференциалов необходимо, чтобы
частичные дифференциалы коммутировали либо антикоммутировали, то есть чтобы двумерные
грани куба состояний были (анти)коммутативны.
Каждая двумерная грань куба состояний, как и в неориентированном случае имеет вид (8.1).
Поскольку PU-графы не имеют оснащения, то, в обозначениях утверждения 8.1, в кубе будут
встречаться только грани четного типа (см. рис. 91). Сформулируем необходимое нам утверждение.
Утверждение 8.9 (Коммутативность двумерных граней). Любая двумерная грань куба состояний либо коммутативна, либо антикоммутативна.
Доказательство. Грань типа 1 антикоммутативна. Двумерные грани типов 2, 3 коммутативны.
Грань типа 4 является сразу коммутативной и антикоммутативной, так как xi = xj = 0 ∈ V (s ⊕
i ⊕ j).
Рассмотрим двумерную грань типа 5 более подробно. Возможно несколько случаев.
1. sgn(vi ) = sgn(vj ) = −1. Тогда vi , vj ∈ s ⊕ i ⊕ j. Без ограничения общности можно считать, что
vi и vj — последние вершины состояния s ⊕ i ⊕ j.
1.1. vi , vj ∈ V0 . Матрицу соотношений A(s ⊕ i ⊕ j) можно представить в форме
B
0
a⊤
(8.9)
⊤ ,
b
⊤
−B
−a −b 0
⊤
где B = B(s). Так как xi = 0 ∈ V (s ⊕ i), строки матрицы (−B − a) порождают вектор (0⊤ 1).
⊤
Следовательно, строки матрицы (−B
− a − b) порождают вектор вида (0⊤ 1 α), α ∈ Z.
⊤
Аналогично, матрица (−B − a − b) порождает вектор (0⊤ β 1). Линейной комбинацией этих
двух векторов будет вектор (0⊤ 0 1 − αβ). Если αβ ̸= 1, имеем (1 − αβ)xj = 0 ∈ V (s ⊕ i ⊕ j). Так
как модуль V (s ⊕ i ⊕ j) свободен, мы получаем xj = 0 ∈ V (s ⊕ i ⊕ j), что неверно. Таким образом,
αβ = 1 и α = β = ±1. Следовательно, xi ± xj = 0 ∈ V (s ⊕ i ⊕ j), так что грань коммутативна или
антикоммутативна.
1.2. vi ∈ V0 , vj ∈ V1 . Матрица соотношений A(s ⊕ i ⊕ j) может быть представлена в виде
0
0
B b
0
0 a⊤ α
(8.10)
⊤
.
−a 0 0
−B
⊤
−α 0⊤ 0
−b
134
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
(
)
B b
Так как xi = 0 ∈ V (s ⊕ j), вектор
α) линейно зависит от строк матрицы
.
⊤
b
0
Следовательно вектор a⊤ зависит от строк матрицы B, так что xi = 0 ∈ V (s), что приводит к
противоречию. Таким образом, данный случай невозможен.
1.3. vi , vj ∈ V1 . Этот случай рассматривается аналогично случаю 1.1.
2. sgn(vi ) = −1, sgn(vj ) = 1. Тогда vi ∈ s ⊕ i ⊕ j и vj ̸∈ s ⊕ i ⊕ j.
2.1. vi , vj ∈ V0 . Без потери общности можно считать что матрица
A(s ⊕ i) имеет
( соотношений
)
B
вид (8.9), где B = B(s ⊕ j). Так как xi = 0 ∈ V (s ⊕ j), то rank Z
= rank Z B. Аналогично,
a⊤
(
)
B
B
равенство xj = 0 ∈ V (s ⊕ j) влечет rank Z
= rank Z B. Следовательно, rank Z a⊤ =
⊤
b
⊤
b
(
)
B
B
⊤
rank Z B, но rank Z a = rank Z
+ 1, поскольку xi = 0 ∈ V (s ⊕ i). Таким образом, этот
⊤
b
⊤
b
случай не реализуется.
2.2. vi ∈ V0 , vj ∈ V1 . Матрицу соотношений A(s ⊕ (
i) можно)представить в виде (8.10), где
⊤
)
(
−B
⊤
B = B(s ⊕ j). Так как xj = 0 ∈ V (s ⊕ j), имеем rank Z
=
rank
. Тогда вектор
−B
Z
⊤
−b
(
)
⊤
⊤
−b порожден строками матрицы −B , а строки матрицы −B ⊤ −a порождают вектор вида
)
(
⊤
−a
−B
⊤
можно преобразованиями строк привести к мат(−b γ). Следовательно, матрицу
⊤
−b
−α
(
)
(
)
⊤
)
(
⊤
−B
−a
−B
−a
⊤
рице
,
где
δ
=
−α−γ.
Если
δ
=
0,
то
rank
=
rank
−a
−B
Z
Z
⊤
0⊤
δ
−b
−α
и xj = 0 ∈ V (s ⊕ i ⊕ j), но это не так.
Если |δ| > 1, то выполняется равенство B = 0 (иначе найдется минор матрицы A(G), не равный
нулю и кратный δ). Следовательно, b = 0. Если −α = 0, то xj = 0 ∈ V (s ⊕ i ⊕ j), что неверно.
Если −α = ±1, то xi ∓ xj = 0 ∈ V (s ⊕ i ⊕ j).
Пусть δ = ±1, тогда xi ∓ xj = 0 ∈ V (s ⊕ i ⊕ j).
2.3. vi ∈ V1 , vj ∈ V0 . Данный случай аналогичен случаю 2.2.
2.4. vi , vj ∈ V1 . Случай не реализуется по тем же причинам, что и случай 2.1.
3. sgn(vi ) = sgn(vj ) = −1. Тогда vi , vj ∈ s ⊕ i ⊕ j.
3.1. vi , vj ∈ V0 . Матрица A(s) имеет вид (8.9), где B = B(s ⊕ i ⊕ j). Так как xi = 0 ∈ V (s ⊕ i),
(
)
B
B
⊤
то rank Z a = rank Z
. Следовательно, вектор a⊤ порождается строками матрицы B
⊤
b
⊤
b
(a⊤
⊤
и вектором b . Это означает, что xi = αxj ∈ V (s ⊕ i ⊕ j) для некоторого α ∈ Z. С другой стороны,
по тем же причинам xi = βxj ∈ V (s ⊕ i ⊕ j), так что xi = αβxi . Если αβ ̸= 1, то выполняются
равенства (1 − αβ)xi = 0 и xi = 0, так как модуль V (s ⊕ i ⊕ j) свободен. Но xi ̸= 0 ∈ V (s ⊕ i ⊕ j).
Следовательно, αβ = 1, так что α = β = ±1 и xi ∓ xj = 0 ∈ V (s ⊕ i ⊕ j).
3.2. vi ∈ V0 , vj ∈ V1 . Матрица соотношений
A(s)
имеет вид (8.10), где B = B(s ⊕ i ⊕ j).
(
)
B
Так как xi ̸= 0 ∈ V (s ⊕ i ⊕ j), то rank Z
= rank Z B + 1. Равенство xj ̸= 0 ∈ V (s ⊕
a⊤
)
(
)
(
(
)
B
B b
+ 1. Но
i ⊕ j) влечет rank Z B b = rank Z B + 1. Тогда rank Z
= rank Z
a⊤
a⊤ α
(
)
)
(
B
B b
rank Z
, поскольку xj ̸= 0 ∈ V (s). Таким образом, данный случай
= rank Z
a⊤
a⊤ α
невозможен.
3.3. Случай vi , vj ∈ V1 аналогичен случаю 3.1.
8. Гомологии Хованова
135
Итак, любая диаграмма типа 5 либо коммутативна, либо антикоммутативна.
Замечание 8.2. Вслед за [183] введем другую классификацию двумерных граней куба состояний: антикоммутативные грани (тип A), коммутативные грани (тип C) и нулевые грани (типы X
и Y). Грани типа 1 соответствуют типу A; грани типов 2, 3 — типу C. Что касается граней типа
5, коммутативным граням приписывается тип C, а антикоммутативным — тип A. Грани типа 4 —
нулевые, так как xi = xj = 0 ∈ V (s ⊕ i ⊕ j), правило приписывания их к типам X или Y будет
дано ниже.
Определение 8.5. Назовем вершину v ∈ V внутренней, если v ∈ V0 и sgn(v) = −1, либо
v ∈ V1 и sgn(v) = 1. В противном случае, вершина v называется внешней.
Замечание 8.3. Слова «внутренний» и «внешний» происходят из реализуемого случая. Пусть
имеется диаграмма классического зацепления. Тогда хордовая диаграмма, построенная по поворачивающему обходу диаграммы согласно рис. 78, будет вложена в плоскость. При этом некоторые
хорды попадут внутрь области, ограниченной ориентированной окружностью хордовой диаграммы, а некоторые хорды будут лежать во внешней области. Разбиение хорд на «внутренние» и
«внешние» задает двудольную структуру на графе пересечений хордовой диаграммы.
Диаграммы типа 4 отличаются от диаграмм типа 5 сменой знака у вершины vi или vj . Поэтому
перебор реализуемых случаев среди вариантов 1.1–3.3 в утверждении 8.9 приводит к следующему
утверждению.
Лемма 8.5. 1. В любой диаграмме типа 5 вершины vi , vj либо обе внутренние, либо обе
внешние.
2. В любой диаграмме типа 4 одна из вершин vi , vj является внутренней, а другая является
внешней.
Следующее утверждение показывает, как связаны соотношения между образующими в противоположных вершинах двумерных граней типа 4 и 5.
Лемма 8.6. Рассмотрим произвольную двумерную грань типа 5. Тогда
• если sgn(vi ) = sgn(vj ), то xi ± xj = 0 ∈ V (s) ⇐⇒ xi ∓ xj = 0 ∈ V (s ⊕ i ⊕ j);
• если sgn(vi ) ̸= sgn(vj ), то xi ± xj = 0 ∈ V (s) ⇐⇒ xi ± xj = 0 ∈ V (s ⊕ i ⊕ j).
Для любой двумерной грани типа 4 имеем
• если sgn(vi ) = sgn(vj ), то xi ± xj = 0 ∈ V (s ⊕ i) ⇐⇒ xi ∓ xj = 0 ∈ V (s ⊕ j);
• если sgn(vi ) ̸= sgn(vj ), то xi ± xj = 0 ∈ V (s ⊕ i) ⇐⇒ xi ± xj = 0 ∈ V (s ⊕ j).
Доказательство. Поскольку диаграммы типа 4 получаются из диаграмм типа 5 сменой знака у
одной из вершин, например, vi , достаточно рассмотреть только диаграммы типа 5.
Обозначим sα = s ∩ Vα , α = 0, 1.
1. Предположим сначала, что sgn(vi ) = sgn(vj ) = −1 и vi , vj ∈ V0 . Тогда vi , vj ̸∈ s. Имеет место
равенство xi + αxj = 0 ∈ V (s). Это означает, что существуют коэффициенты λk , где vk ∈ s0 , такие
что
∑
xi + αxj = ris + αrjs +
λk rks ∈ Z⟨xl | vl ∈ s1 ⟩ ⊕ Z⟨xi , xj ⟩.
k:vk ∈s0
∑
Другими словами, имеются соотношения
λk sgn(vl )akl + sgn(vl )ail + αsgn(vl )ajl = 0 для любого
k
∑
l ∈ s1 . Следовательно, k λk akl = −ail − α · ajl .
Равенство xi + βxj ∈ V (s ⊕ i ⊕ j) означает, что найдутся числа µl , vl ∈ (s ⊕ i ⊕ j)1 = s1 , такие
что
∑
xi + βxj =
µl rls⊕i⊕j ∈ Z⟨xk | vk ∈ (s ⊕ i ⊕ j)0 ⟩.
l : vl ∈(s⊕i⊕j)1
Это равносильно системе уравнений:
∑
∑
µl alk = 0, vk ∈ s0 ,
µl ali = −sgn(vi ),
l
l
∑
l
µl alj = −βsgn(vj ).
136
Тогда
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
∑
λk µl akl =
∑
(k,l) : vk ∈s0 , vl ∈s1
µl
∑
l
λk akl = −
∑
k
l
=
С другой стороны,
∑
λk µl akl = −
k,l
∑
k
∑
λk
l
µl (ail + α · ajl ) =
∑
µl ali + α
l
∑
µl alj = −sgn(vi ) − αβsgn(vj ).
l
µl alk = 0. Таким образом, sgn(vi )sgn(vj ) + αβ = 0 и
α = −β, что доказывает утверждение леммы.
Случай vi , vj ∈ V1 рассматривается аналогично.
2. Пусть sgn(vi ) = −1, sgn(vj ) = 1 и vi ∈ V0 , vj ∈ V1 . Обозначим s′α = (s ⊕ j) ∩ Vα , α = 0, 1.
Тогда s0 = s′0 , s1 = s′1 ∪ {vj } и (s ⊕ i ⊕ j)0 = s′0 ∪ {vi }, (s ⊕ i ⊕ j)1 = s′1 .
Равенство xi + αxj = 0 ∈ V (s) означает, что существуют λk , vk ∈ s0 , такие что
∑
xi + αxj = ris +
λk rks ∈ Z⟨xk | vk ∈ s1 ⟩ ⊕ Z⟨xi ⟩.
k : vk ∈s′0
Таким образом, имеются соотношения
∑
λk akl + ail = 0, vl ∈ s′1 ,
∑
k
λk akj + aij = −αsgn(vj ).
k
Равенство xi + βxj = 0 ∈ V (s ⊕ i ⊕ j) приводит к соотношениям
∑
∑
µl alk = βajk , vk ∈ s′0 ,
µl ali + βaji = −sgn(vi ).
l : vl ∈s′1
Тогда
l : vl ∈s′1
∑
λk µl akl =
∑
(k,l) : vk ∈s′0 , vl ∈s′1
С другой стороны,
∑
(k,l) : vk ∈s′0 , vl ∈s′1
λk µl akl = −
µl
∑
k
∑
λk
∑
l
µl ail = sgn(vi ) + βaji .
l
k
l
∑
λk akl = −
µl alk = β
∑
λl akj = −βaij − αβsgn(vj ).
k
Так как aji = −aij , имеем αβ = −sgn(vi )sgn(vj ) = 1. Таким образом, xi ± xj = 0 ∈ V (s) тогда и
только тогда, когда xi ± xj = 0 ∈ V (s ⊕ i ⊕ j).
3. Случай sgn(vi ) = sgn(vj ) = 1 рассматривается аналогично случаю 1.
Рассмотрим двумерную грань типа 4 и пусть vi — ее внутренняя вершина. Мы припишем
грани тип X, если xi = sgn(vj )xj ∈ V (s ⊕ i) (согласно лемме 8.6, это эквивалентно равенству
xi = −sgn(vi )xj ∈ V (s ⊕ j)), и припишем грани тип Y, если xi = −sgn(vj )xj ∈ V (s ⊕ i).
Заметим, что для определения типа грани X или Y существенной является двудольная структура графа. Этот факт показывает, что имеется препятствие к обобщению конструкции нечетных
гомологий Хованова на виртуальные зацепления (даже на те зацепления, которым соответствуют
ориентированные атомы).
Для определения дифференциала в нечетном комплексе Хованова для граф-зацеплений, как в
случае нечетных гомологий Хованова обычных зацеплений, требуется дополнительная структура
— расстановка знаков.
Обозначим множество ребер куба состояний как E. Назовем расстановкой знаков произвольное отображение ϵ : E → {±1} (см. [183]). Двумерная грань называется четной (соотв.нечетной),
если она содержит четное (соотв. нечетное) количество ребер e, таких что ϵ(e) = −1. Расстановкой знаков типа X называется такая расстановка, что все грани типов A и X являются четными,
а все грани типов C и Y являются нечетными. Аналогично, расстановка знаков типа Y — это
расстановка, у которой грани типов A и Y четные, а грани типов C и X нечетные.
Следующая лемма аналогична соответствующей лемме в работе [183].
Лемма 8.7. Любой трехмерный куб в кубе состояний содержит четное количество граней
типов A и X. Аналогично, любой куб содержит четное количество граней типов A и Y.
8. Гомологии Хованова
137
Доказательство. Доказательство состоит в переборе всех возможных конфигураций куба с использованием лемм 8.5, 8.6. В реализуемом случае данный перебор сводится к рассмотрению
всевозможных ориентированных атомов с тремя вершинами,
∧∗
∧
/ ∗ V (s ⊕ i ⊕ j ⊕ k)
V (s ⊕ i ⊕ k)
∧∗
mm6
mmm
m
m
mm
mmm
O
/
V (s ⊕ i)
O
∧∗
∧∗
mm6
mmm
m
m
mm
mmm
∧∗
5
kkk
kkk
k
k
kkk
kkk
V (s ⊕ i ⊕ j)
O
/
V (s ⊕ k)
/
V (s)
O
∧∗
∧∗
5
kkk
kkk
k
k
kkk
kkk
V (s ⊕ j ⊕ k)
V (s ⊕ j)
В соответствии с рангами модулей, сопоставляемых вершинам трехмерного куба, можно выделить
18 возможных типов кубов (с точностью до перестановки осей), см. рис. 92, которые обладают
следующими двумя свойствами:
1. начальная вершина имеет метку 0;
2. разность чисел в любых двух соседних вершинах равна ±1.
Ниже число в вершине, отвечающей состоянию s′ куба, равно rank Z V (s′ ) − rank Z V (s). Рассматриваемые случаи можно объединить в следующие группы.
Случаи 1, 6, 13, 18. Типы двумерных граней однозначно определяются рангами модулей, соответствующих состояниям, и их количество можно посчитать явно. Например, в случае 6 куб
содержит 4 грани типа C и 2 грани типа A.
Случаи 2, 5, 7, 10, 14, 15. Эти случаи не реализуются согласно лемме 8.5. Невозможно разделить
вершины vi , vj , vk на внутренние и внешние, чтобы все грани типа 4, инцидентные состоянию s
либо s ⊕ i ⊕ j ⊕ k, имели одну внутреннюю и одну внешнюю вершины.
Случаи 3, 8, 11, 16. Куб имеет 4 коммутативные граней (случаи 11, 16) либо 2 грани типа A и
2 грани типа C (случаи 3, 8). Другие две грани куба противоположны и имеют одинаковый тип,
так как одна из них является проекцией другой.
Случаи 4, 9, 12, 17. Рассмотрим, например, случай 4. Куб содержит одну антикоммутативную
грань и две коммутативные грани. Другие три грани инцидентны состоянию s ⊕ i. Предположим,
что xi = xj = xk ∈ V (s ⊕ i) и sgn(vi ) = sgn(vj ) = sgn(vk ) = −1. Тогда рассматриваемые три грани
имеют тип A, Y и Y. При изменении знака у одной из вершин куба vi , vj , vk либо изменении знака
у одной из переменных xi , xj , xk в V (s⊕i) поменяются типы у двух граней из трех. Следовательно,
при общее число A-граней и X-граней остается четным.
С учетом справедливости предыдущего утверждения, доказательство следующей леммы дословно повторяет доказательство леммы 1.2 из работы [183].
Лемма 8.8. У любого PU-ориентированного двудольного помеченного графа G существует
расстановка знаков типа X и расстановка типа Y.
Фиксируем некоторую расстановку знаков ϵ типа X или Y и определим цепной комплекс
⊕ ∧∗
V (s)
C(G) =
s⊂V
с дифференциалом
∂ϵ (u) =
∑
ϵ(e)∂ss′ (u).
{s,s′ ⊂V | s→s′ =ϵ∈E}
Следующие леммы были доказаны в работе [183], их доказательства остаются справедливыми
в нашей ситуации.
Лемма 8.9. Если ϵ и ϵ′ — две расстановки знаков одного типа (X или Y), то цепные комплексы (C(G), ∂ϵ ) и (C(G), ∂ϵ′ ) изоморфны.
138
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
1O
0
? 2O
/3
? O
/2
O
?1
/2
?
/1
? 2O
1O
?1
0
случай 1
1O
0
? 0O
?1
/0
O
/1
/1
? O
/2
?
−1
O
0
/0
O
?1
/1
/1
? O
/0
?
1O
0
? 0O
?1
1O
0
1O
0
/ −1
? O
/0
O
?1
/
?0
? 0O
/ −1
? O
/1
случай 10
/0
O
−1
?
/ −1
/ −2
?
0
? O
1O
−1
?
0
−1
O
0
−1
?
/ −2
O
/ −1
/ −1
? O
/0
?
случай 16
/1
?1
0
/0
O
/1
/1
? O
/0
?
/ −1
−1
O
/0
?
/ −1
? O
/0
O
?1
/0
?
0
? O
/ −1
? O
/1
случай 11
0
−1
O
0
0
? O
−1
?
/0
O
/ −1
−1
O
0
? O
?1
0
−1
O
0
0
? O
−1
?
−1
O
/0
?
0
−1
?
/ −2
O
/ −1
/0
O
/1
/1
? O
/2
?
/ −1
? O
/ −2
?
случай 17
/0
O
/1
? O
/ −1
/0
?
случай 9
1O
0
? 0O
−1
?
/0
O
/ −1
? O
/ −1
/0
?
случай 12
−1
O
0
0
? O
−1
?
случай 14
−2
? O
/1
/0
?
случай 6
/1
? O
/0
O
/2
O
/1
? O
случай 3
случай 8
случай 13
−2
? O
/2
?
1O
случай 5
случай 7
? 0O
/2
O
? 2O
случай 2
случай 4
0
? O
/1
? O
/0
O
/ −1
? O
/ −1
/ −2
?
случай 15
−1
O
0
−2
? O
−1
?
/ −2
O
/ −1
/ −3
? O
/ −2
?
случай 18
РИС. 92. Типы 3-мерных кубов в кубе состояний
8. Гомологии Хованова
139
Лемма 8.10. Если ϵ и ϵ′ — две расстановки знаков различных типов, то имеется изоморфизм (C(G), ∂ϵ ) ∼
= (C(G), ∂ϵ′ ).
Таким образом, гомологии комплекса C(G) не зависят от выбора расстановки знаков.
′
Определение 8.6. Гомологии Kh (G) цепного комплекса (C(G), ∂) называются приведенными
нечетными гомологиями Хованова PU-ориентированного двудольного помеченного графа G.
Основная теорема данного параграфа утверждает, что определенные выше нечетные гомологии
Хованова являются инвариантом PU-граф-зацеплений.
′
Теорема 8.2. Гомологии Хованова Kh (G) инвариантны относительно движений R, Ω1 ,
P
Ω2 U , Ω3 , Ω4 .
Доказательство. Доказательство теоремы в целом аналогично доказательству в случае Z2 , за
исключением необходимости следить за расстановкой знаков.
e — граф, получаемый из
Пусть G — PU-ориентированный двудольный меченый граф, и пусть G
P
U
G при помощи некоторого движения Рейдемейстера R, Ω1 , Ω2 , Ω3 , Ω4 .
Доказательство инвариантности гомологий относительно движения R повторяет рассуждения
леммы 2.3 из [183].
Инвариантность относительно Ω1 .
e получается из G добавлением изолированной вершины v. Тогда его матрица смежности
Пусть G
(
)
0 0⊤
e
e расщепляется как Z-модуль в сумму C ⊕ Cv , где
A(G) имеет вид
. Комплекс C(G)
0 A(G)
e таким что v ̸∈ s, а Cv соответствует состояниям s ⊆ V(G),
e
C соответствует состояниям s ⊂ V(G),
таким что v ∈ s. Имеется естественная биекция между состояниями в C(G), C и Cv . Пусть ϵ —
e следующим образом.
расстановка знаков на C(G). Определим расстановку знаков e
ϵ на C(G)
Положим e
ϵ = ϵ на Cv и e
ϵ(e) = 1 для всех ребер между C и Cv . Если sgn(v) = 1, положим e
ϵ = −ϵ
на C. Если sgn(v) = −1, положим e
ϵ = δ · ϵ на C, где δ(s → s ⊕ i) = 1 , если rank Z V (s ⊕ i) =
rank Z V (s) + 1, и δ(s → s ⊕ i) = −1.
Тогда e
ϵ — расстановка знаков того же типа, что и ϵ, поскольку все двумерные грани, содержащие
ребра, которые соединяют C и Cv , имеют тип C или A, а четность других граней такая же, как в
C(G).
e ∂eϵ ) изоморфен произведению комплексов (C(G), ∂ϵ ) ⊗ C(v), где комплекс C(v)
Комплекс (C(G),
равен комплексу графа с одной вершиной. Тогда H∗ (C(v)) = Z · 1, где 1 ∈ H0 (C(v)), если sgn(v) =
1, и 1 ∈ H1 (C(v)), если sgn(v) = −1. Таким образом, мы имеем
′ e
′
′
′
Kh (G)
= Kh (G) ⊗ Kh (v) ∼
= Kh (G).
Инвариантность относительно Ω2 .
e при помощи движения
Предположим, что мы добавляем вершины v и w, чтобы получить граф G
Ω2 , и что sgn(v) = 1, sgn(w) = −1. Как и в случае коэффициентов Z2 , мы можем записать комплекс
e в виде (8.3). Заметим, что ограничение расстановки знаков e
e на комплекс
C(G)
ϵ комплекса C(G)
C является расстановкой знаков того же типа, что и e
ϵ.
Для
любого
состояния
s
из
C
зададим
линейную
функцию f : V (s) → Z2 формулой
vw
∑
f ( λi xi ) = λ1 + λ2 . Функция f корректно определена, поскольку она равна нулю на люi
бом соотношении:
f (ris )∧= ai1 + ai2 = 0, так как ai1 = ai2 и sgn(vi ) = −sgn(vj ). Тогда
∧
∧∗
∗
V (s) =
ker f ⊕ x2 ∗ V (s) и Cvw = X ⊕ x2 Cvw . Подкомплекс X → Cw ацикличен. Слеe совпадают с гомологиями факторкомплекса вида (8.4). Частное этого
довательно, гомологии C(G)
e имеет те же
комплекса по подкомплексу C тоже оказывается ациклическим. Таким образом, C(G)
гомологии, что и C = C(G).
Инвариантность относительно Ω3 .
Без ограничения общности можно считать, что вершины u, v, w, участвующие в третьем двиe Тогда матрицы смежности G и G
e
жении Рейдемейстера, имеют номера 1, 2, 3 в V(G) = V(G).
140
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
имеют вид
0
1
1 0⊤
−1 0
0 a⊤
,
A(G) =
−1 0
0 b⊤
0 −a −b D
0
0
0 a⊤ − b⊤
0
0
a⊤
e = 0
.
A(G)
⊤
0
0
0
b
b − a −a −b
D
Соответствующие матрицы соотношений равны
0
1
1 0⊤
−1 0
0 a⊤
,
A(G) =
⊤
−1 0
0 b
0 −a −b D
e =
A(G)
0
0
0
b−a
0
0
0
a
0 a−b
0
a⊤
⊤
0
b
b
D
⊤
.
e
Обозначим Ve (s) = V (G(s)).
Тогда для любого s ⊂ V(G) \ {u, v, w}, как и в неориентированном
∼
e
случае, имеем V (s) = V (s), V (s ⊕ v) ∼
= Ve (s ⊕ v), V (s ⊕ w) ∼
= Ve (s ⊕ w), V (s ⊕ v ⊕ w) ∼
= Ve (s ⊕ u ⊕ v) ∼
=
∼
∼
e
Ve (s ⊕ u ⊕ w), V (s ⊕ u ⊕ v ⊕ w) ∼
V
(s
⊕
u),
V
(s
⊕
u
⊕
v)
V
(s
⊕
u
⊕
w)
V
(s)
и
соответствующие
=
=
=
изоморфизмы внешних алгебр согласованы с дифференциалом.
e записываются в форме куба (8.5).
Комплексы C(G) и C(G)
Для каждого состояния s в Cu определим линейную функцию f : V (s) → Z формулой
∑
euvw — функцию f : Ve (s) → Z формулой f (∑ λi xi ) =
f ( λi xi ) = λ1 , а для состояния из C
i
i
λ1 + λ2 − λ3 . Рассуждая, как в теореме 8.1, мы можем свести комплексы (8.5) к комплексам (8.6)
и (8.7).
Покажем, что два полученных комплекса изоморфны.
Пусть ϵ — расстановка знаков типа X на C(G). Обозначим через ϵ∅ , ϵu , ϵuv и т.д. ограничения ϵ
на ребра модулей C, Cu , Cuv и т.д. Ограничение расстановки ϵ на ребра между кубами Cu и Cuv
будем обозначать как ϵu (v), для ребер между другими кубами будем использовать аналогичное
обозначение.
Как и в [183], мы можем считать, что ϵuv = ϵuw .
Нам потребуется явный вид изоморфизмов V (s ⊕ v ⊕ w) ∼
= Ve (s ⊕ u ⊕ v) ∼
= Ve (s ⊕ u ⊕ w) и т.д.,
упомянутых выше. Мы определяем эти изоморфизмы на образующих, как показано в таблице
x1
x2
x3
Vuv → V
−x2
0
x3 − x2
Vuw → V
−x3
x2 − x3
0
Vuvw → Veu −x2 = −x3
x1
−x1
Vvw → Veuv
x2
x1 − x2
−x1
e
Vvw → Vuw
x3
x1
−x1 − x3
(8.11)
Другие образующие xi , i > 4, переходят в себя: xi 7→ xi . Здесь V означает V (s), Vu означает
V (s ⊕ u), Vuv — V (s ⊕ u ⊕ v) и т.п.
Рассматриваемые отображения индуцируют изоморфизмы модулей ϕuv : Cuv → C, ϕuw : Cuw →
vw
e
e
eu , ϕvw
C, ϕuvw : Cuvw → C
uv : Cvw → Cuv , ϕuw : Cvw ≃ Cuw . Ниже для отождествления модуля
uw
Cuw с модулем C мы будем использовать подкорректированный изоморфизм ϕuw
+ = δϕ , где
δ = −ϵu (v)ϵu (w). Далее, мы задаем расстановку знаков в образе так, чтобы получить цепное
8. Гомологии Хованова
141
отображение квадратов
Cuv
O
ϵuv (w)
/ Cuvw
O
CO
−→
ϵvw (u)
ϵv (u)
Cv
Cuw
O
/ Cuvw
O
CO
−→
ϵvw (u)
Cw
ϵw (v)
e2 ϵvw (u)
λ
Cv
ϵuw (v)
ϵw (u)
eu
/C
O
e2 ϵv (u)
λ
/ Cvw
ϵv (w)
e1 ϵuv (w)
λ
euv
/C
e1 ϵv (w)
λ
δϵuw (v)
e3 δϵw (u)
λ
/ Cvw
Cw
eu
/C
O
e3 ϵvw (u)
λ
ϵw (v)
euw .
/C
ei , i = 1, 2, 3, равен
Индуцированная расстановка знаков e
ϵ изображена на ребрах диаграммы. Знак λ
e
−1 на ребрах s → s ⊕ i в C(G), таких что rank Z V (s ⊕ i) = rank Z V (s) + 1, и равен 1 в остальных
случаях.
eu . ДейОтображения Cuv → Cuvw и Cuw → Cuvw индуцируют одно и то же отображение C → C
s⊕1⊕2
s
uvw
uv
−1
ствительно, первый квадрат дает отображение e
ϵ∅ (u)∂s⊕1 = ϵuv (w)ϕ ∂s⊕1⊕2⊕3 (ϕ ) , в то время
s⊕1⊕3
uvw
−1
uw −1 uv
как второй — отображение ϵuw (v)ϕ ∂s⊕1⊕2⊕3 (ϕuw
+ ) . Изоморфизм (ϕ+ ) ϕ , отождествляюs⊕1
s⊕1
щий модули Cuv и Cuw , равен δ∂s⊕1⊕3 (∂s⊕1⊕2 )−1 . Следовательно, два индуцированных отображения будут совпадать, если
s⊕1⊕2
s⊕1
s⊕1⊕3
s⊕1
ϵuv (w)∂s⊕1⊕2⊕3
∂s⊕1⊕2
= δϵuw (v)∂s⊕1⊕2⊕3
∂s⊕1⊕3
.
Но δ = −ϵu (v)ϵu (w) и
s⊕1⊕2
s⊕1
s⊕1⊕3
s⊕1
ϵuv (w)ϵu (v)ϕuvw ∂s⊕1⊕2⊕3
∂s⊕1⊕2
= −ϵuw (v)ϵu (w)ϕuvw ∂s⊕1⊕2⊕3
∂s⊕1⊕3
,
поскольку любая двумерная грань в C(G) с учетом расстановки знаков антикоммутативна.
Первый изоморфизм сохраняет тип двумерных граней и не меняет четность по отношению к
расстановкам знаков. Тогда индуцированная расстановка знаков имеет тип X на квадрате
CO
eu
/C
O
Cv
euv
/C
Второй изоморфизм сохраняет четность двумерных граней типов 1, 2, 3, и меняет четность
e1 =
граней типов 4 и 5, так как в этом случае имеется единственное ребро на грани, у которого λ
−1. С другой стороны, изоморфизм меняет коммутативные грани типа 5 на антикоммутативные и
наоборот, так как соотношение x1 = x2 ∈ Vuvw равносильно соотношению −x3 = x1 ∈ Veu . X-грани
становятся Y-гранями и наоборот, так как равенство x2 = sgn(v1 )x1 (= −x1 ) ∈ Vvw переходит в
x1 = −x3 = −sgn(v3 )x3 ∈ Veuw . Таким образом, e
ϵ будет иметь тип X на квадрате
CO
eu
/C
O
Cw
euw
/C
e (это возможно,так
Мы можем расширить e
ϵ до расстановки знаков типа X на всем комплексе C(G)
как факторпространство, получающееся после сжатия всех граней, где определено e
ϵ, в точку имеет
e вместе
нулевую группу когомологий H 2 ). Тогда редуцированный комплекс, полученный из C(G),
с выбранной расстановкой знаков будет изоморфен соответствующему комплексу, полученному из
C(G).
142
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Инвариантность относительно Ω4 .
e
Пусть вершины u и v, принимающие участие в движении Ω4 , имеют номера p и q в V(G) = V(G).
e
Коэффициенты матриц смежности A(G) = (aij ) и A(G) = (e
aij ) связаны соотношением
aij − apq aip ajq + apq aiq ajp , {i, j} ∩ {p, q} = ∅,
aij ,
{i, j} ∩ {p, q} ̸= ∅, {p, q},
e
aij =
−aij ,
{i, j} = {p, q}.
Рассмотрим отображение ϕ, действующее на
s ∪ {u, v},
s \ {u, v},
ϕ(s) =
s,
множестве состояний согласно формуле
{u, v} ∩ s = ∅,
{u, v} ∩ s = {u, v},
{u, v} ∩ s ̸= ∅, {u, v},
вместе с линейными отображениями Φ : V (s) → V (ϕ(s)), заданными формулой
xi , i ̸= p, q,
xq , i = p,
Φ(xi ) =
xp , i = q.
Тогда отображение Φ корректно определено и, после естественного продолжения до гомоморe Это отображение Φ не меняет
физма внешних алгебр, определяет отображение Φ : C(G) → C(G).
e
тип двумерных граней. Если мы выберем расстановки знаков ϵ и e
ϵ на пространствах C(G) и C(G)
∗
соответственно, так что ϵ = ϕ (e
ϵ), то Φ будет цепным отображением. Таким образом, комплексы
e ∂eϵ ) изоморфны, как и их гомологии.
(C(G), ∂ϵ ) и (C(G),
Следствие 8.4. Нечетные гомологии Хованова Kh(G) являются инвариантом PU-графзацеплений.
8.3. Полином Джонса граф-зацеплений и гомологии Хованова граф-зацеплений. Гомологии Хованова, снабженные градуировками, тесно связаны со скобкой Кауфмана меченых графов,
введенной выше. Оказывается, что, как и в случае обычных узлов и зацеплений, скобка Кауфмана
(с точностью до сдвига градуировки) совпадает с эйлеровой характеристикой биградуированных
гомологий Хованова. Чтобы показать справедливость данного утверждения, опишем, какие градуировки имеют гомологии Хованова граф-зацеплений. Рассмотрим сначала граф-зацепления без
ориентации.
Пусть G — меченый граф с n перекрестками. В комплексе Хованова C(G) есть две градуировки: гомологическая градуировка M0 и алгебраическая градуировка deg в градуированных алгебрах
∧
∗
V (s). Дифференциал не является∧однородным относительно deg, однако он согласован с градуировкой Q0 , которая элементу u ∈ r V (s) сопоставляет число Q0 (u) = dimZ2 V (s) − 2r + M0 (s).
Дифференциал увеличивает на единицу гомологическую градуировку M0 и не меняет градуировку
Q0 . Тогда имеется разложение гомологий Хованова в прямую сумму
⊕
Kh(G) =
Kh(G)(m,q) .
m,q∈Z
Эйлерова характеристика гомологий Хованова, как показывает теорема ниже, с точностью до
множителя равна скобке Кауфмана графа G.
Теорема 8.3.
∑
(−1)m dimZ2 Kh(G)(m,q) · tq = (it1/2 )−n ⟨G⟩(it1/2 ).
m,q∈Z
Доказательство. Левая часть выражения совпадает с эйлеровой характеристикой комплекса
C(G). Каждое состояние s ⊆ V(G)
∧ имеет гомологическую градуировку M0 (s) = α(s), и соответствующее пространство цепей ∗ V (s) вносит в эйлерову характеристику вклад
(−1)α(s) (t + t−1 )dim V (s) tα(s) .
Так как dim V (s) = corank Z2 A(s) и α(s) = 12 (α(s) − β(s) + n), сумма по всем состояниям равна
правой части доказываемого равенства.
8. Гомологии Хованова
143
Градуировки M0 , Q0 комплекса Хованова не сохраняются при движениях Рейдемейстера. В
следующей таблице показано, эти градуировки меняются при движениях.
Ωg 1 +
Ωg 1 −
Ωg 2
Ωg 3
Ωg 4
Ωg 4′
M0 Q0
0 −1
1
1
1
0
0
0
0
0
0
0
(8.12)
Здесь Ωg 1± означает добавление изолированной вершины со знаком ±1, а Ωg 2 означает движение
Рейдемейстера, добавляющее две вершины. В ячейках таблицы стоят сдвиги градуировок после
совершения соответствующего движения.
Итак, группы Kh(G)(m,q) не являются инвариантами граф-зацеплений. Тем не менее, они допускают нормализацию для граф-узлов (см. определение 7.14).
Напомним, что число закрученности граф-узла инвариантно относительно движений Ωg 2 − Ωg 4.
Движение Ωg 1± меняет число закрученности на ∓1. Опираясь на этот факт и таблицу (8.12) мы
строим две градуировки, сохраняющиеся при движениях Рейдемейстера
n(G) + 3w(G)
n(G) + w(G)
, Q = Q0 +
.
(8.13)
2
2
Здесь n(G) есть число вершин графа G.
Обозначим через Khm,q (G) однородную часть гомологий Kh(G), имеющую градуировки M =
m и Q = q. Из инвариантности градуировок относительно движений Рейдемейстера вытекает
утверждение.
M = M0 −
Утверждение 8.10. Группы Khm,q (G), m, q ∈ Z, являются инвариантами граф-узлов.
Число закрученности позволяет определить другой инвариант граф-узлов — полином Джонса.
Из теоремы 8.3 следует утверждение.
Теорема 8.4. Биградуированные гомологии Хованова граф-узлов Khm,q (G) представляют
собой категорификацию полинома Джонса, т.е.
∑
(−1)m dimZ2 Khm,q (G) · tq = X(G)(it1/2 ).
m,q∈Z
Перейдем теперь к случаю PU-граф-зацеплений. Пусть G — PU-ориентированный двудольный
граф (оснащение каждой вершины равно нулю), и пусть A = A(G) — его матрица смежности.
На нечетном комплексе Хованова графа G, как и в случае неориентированных граф-зацеплений,
имеются
∧ гомологическая градуировка M0 и алгебраическая градуировка Q0 , которая на элементе
u ∈ r V (s) принимает значение Q0 (u) = rank Z V (s) − 2r + M0 (s). Отсюда имеем разложение
⊕
′
′
нечетных гомологий Хованова Kh (G) = m,q∈Z Kh (G)(m,q) .
Нам нужно определить скобку Кауфмана для PU-ориентированного графа G. Для этого расb получаемый из графа G забыванием ориентации.
смотрим неориентированный меченый граф G,
b
Вершины графа G имеют знаки, равные знакам соответствующих вершин в G, и оснащение 0.
b = A(G)
b графа G
b является редукцией по модулю 2 матрицы A(G).
Тогда матрица смежности A
Определение 8.7. Назовем скобкой Кауфмана ⟨G⟩ PU-ориентированного двудольного помеb
ченного графа G полином ⟨G⟩.
Назовем PU-граф-зацепление с представителем G главно унимодулярным граф-узлом (PUb — граф-узел в смысле определения 7.14.
граф-узлом), если G
Число закрученности w(G) двудольного PU-ориентированного помеченного графа G полагаем
b
равным числу w(G).
Назовем полиномом Джонса X(G) главно унимодулярного граф-узла с представителем G поb
лином X(G).
144
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
Заметим, что определение PU-граф-узла корректно, поскольку забывание ориентации «функториально», т.е. если два PU-ориентированных графа G и G′ связаны движением Рейдемейстера, то
bиG
b ′ связаны тем же самым движением.
соответствующие им неориентированные графы G
Для PU-граф-узла G можно при помощи формул (8.13) ввести инвариантные градуировки M
и Q и, аналогично неориентированному случаю, получить сохраняющееся при движениях Рейде⊕
′
′
мейстера разложение Kh (G) = m,q∈Z Khm,q (G).
Из свойства главной унимодулярности матрицы A вытекает следующая лемма.
b имеем rank Z A(s) = rank Z A(s).
b
Лемма 8.11. Для любого состояния s ⊂ V(G) = V(G)
2
Доказательство. Без ограничения общности можно считать, что s = V(G). Пусть m — некоторый
минор матрицы A, а m
b — соответствующий ему минор (т.е. минор, имеющие те же наборы строк
b Тогда m ≡ m
и столбцов, что и m) матрицы A.
b (mod 2). Согласно лемме 8.3, m равен 0, 1 или
−1. Следовательно, m ̸= 0 тогда и только тогда, когда m
b ̸= 0. Заключение леммы теперь следует
из того факта, что ранг матрицы равен максимальному размеру ненулевого минора.
Доказанная лемма позволяет дать определение скобки Кауфмана графа G в терминах матрицы
смежности A.
Следствие 8.5. Скобка Кауфмана PU-ориентированного графа G равна
∑
⟨G⟩(a) =
aα(s)−β(s) (−a2 − a−2 )corankZ A(s) ,
s⊂V(G)
где α(s) равно сумме вершин с метками − из s и вершин с метками + из V(G) \ s, β(s) =
|V(G)| − α(s).
Используя данное следствие, мы можем сформулировать теорему, связывающую нечетные гомологии Хованова со скобкой Кауфмана и полиномом Джонса. Доказательство этой теоремы не
отличается от неориентированного случая.
Теорема 8.5. Пусть G — PU-ориентированный двудольный меченый граф с n вершинами.
Тогда эйлерова характеристика нечетных гомологий Хованова (относительно градуировок
M0 и Q0 ) совпадает (с точностью до множителя) со скобкой Кауфмана графа G:
∑
′
(−1)m rank Z Kh (G)(m,q) · tq = (it1/2 )−n ⟨G⟩(it1/2 ).
m,q∈Z
Если G является представителем PU-граф-узла, то нечетные гомологии Хованова, рассматриваемые с инвариантными градуировками M и Q, категорифицируют полином Джонса:
∑
′
(−1)m rank Z Khm,q (G) · tq = X(G)(it1/2 ).
m,q∈Z
9.
НЕРЕШЕННЫЕ
ЗАДАЧИ
В данном разделе мы сформулируем некоторые открытые проблемы, касающиеся свободных
узлов, граф-зацеплений и комбинаторной теории узлов
9.1. Свободные узлы.
1. Известно, что плоские виртуальные узлы алгоритмически распознаются, см. [69] и стр. 14.
Возникает вопрос, существует ли какой-нибудь алгоритм распознающий два свободных узла?
2. Выше мы построили отображение из всех виртуальных узлов в виртуальные узлы с ориентируемыми атомами. В работе [167] построено отображение из узлов на фиксированной
поверхности на классические узлы. Это отображение не согласуется со стабилизацией. В настоящее время второму автору известно, как согласовать это отображение со стабилизацией,
т.е. как на диаграммном уровне построить отображение из виртуальных узлов в классические
узлы.
Можно ли придумать другие отображения, которые бы проецировали множество виртуальных узлов на множество классических узлов? Например, попытаться найти индекс, используя
характеристические классы.
9. Нерешенные задачи
145
3. Тураевым было построено отображение из длинных плоских узлов в длинные виртуальные
узлы. Можно ли построить хоть какое-нибудь отображение из длинных свободных узлов
в длинные виртуальные узлы? Этот вопрос можно расширить и попытаться построить хоть
какое-нибудь отображение, которое «увеличивает» структуру.
4. Задача о кобордизмах в сечениях: Пусть дан свободный узел и его кобордизм. При переходе
от сечения кобордизма к другому сечению могут происходить перестройки Морса и движения Рейдемейстера. При этом топология объемлющей поверхности (кобордизма) накладывает
определенные условия на тип движений Рейдемейстера, которые могут происходить при переходе от уровня к уровню. Можно ли построить четность на данном свободном узле, которая
определялась бы только этим кобордизмом и уважала бы только движения внутри этого
кобордизма.
5. Доказать или опровергнуть гипотезу о не единственности минимального представителя свободного зацепления, т.е. найдется свободное зацепление, которое имеет несколько минимальных представителей.
9.2. Граф-зацепления.
1. Можно ли построить проекцию из множества граф-зацеплений на множество реализуемых
граф-зацеплений?
2. Построить четность на граф-зацеплениях используя критерий Буше о реализуемости графа.
Так же попробовать найти четность, ответственную за циклическую 6-реберную связность,
см. [21].
3. Построить обобщения фробениусова расширения и инварианта Расмуссена на «жесткие»
граф-зацепления с ориентируемыми атомами.
4. Верно ли, что два эквивалентных реализуемых граф-зацепления эквивалентны в классе реализуемых. Если это не так, то построить пример.
5. Построить группу для граф-зацеплений, аналогичную группе из п. 6.
6. Построить «граф-косы».
9.3. Кобордизмы. Методы, использованные для доказательства того, что инвариант L доставляет препятствие к срезанности, не обобщаются непосредственно для получения нижних оценок
на срезанный род свободных узлов. Две причины состоят в следующем. Во-первых, когда мы определяем четность и уточненную четность на двойных линий на D, мы выбираем произвольную
кривую, соединяющую два прообраза точки на двойной кривой. Мы утверждаем, что любые две
кривые, соединяющие два таких прообраза (и правильно ведущие себя в окрестности концов),
являются гомотопными. Это верно в случае кобордизма рода нуль, но в случае поверхности Dh
произвольного рода h это, вообще говоря, неверно.
Таким образом, чтобы определить четность для двойных линий, нам нужно будет наложить
некоторые ограничения на затягивающую поверхность: нужно будет потребовать, чтобы класс когомологий, двойственный графу Ψ, был Z2 -гомологически тривиальным. Важность свойства четновалентных графов быть Z2 -гомологически тривиальными тесно связана с атомами, подробнее
см. [161].
Другая проблема состоит в том, что граф Риба произвольной функции Морса (не обязательно
соответствующей диску) не обязательно является деревом. Рассмотрим рис. 93.
Таким образом, стартуя со свободного узла K, у которого, скажем, L(K) = 8, мы (в принципе)
можем разбить его перестройкой Морса на свободной двухкомпонентное зацепление, состоящее
из двух свободных узлов K1 и K2 , у которых L(Ki ) = 4, а затем другой перестройкой Морса перестроить это тривиальное зацепление в тривиальный узел. Инвариант L не является препятствием
к этому, так как 4 и −4 в сумме дают нуль.
В работе [127] построено усиление Gm группы G построенной в настоящей работе (в обозначениях [127] наша группа G есть G1 ) и построены инварианты свободных узлов со значениями в
классах сопряженности элементов из Gm . Идея состоит в том, что четные хорды далее подразделяются на хорды разных видов, что приводит к уточнению образующих и соотношениях в группе;
эти построения тесно связаны с итерированными четностями и отображением f, удаляющим
нечетные перекрести. Похоже, что все инварианты, связанные с группами Gm , также доставляют
препятствие к срезанности узла. Более того, в работе [150] построены инварианты виртуальных
146
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
0
4
4
8
РИС. 93. Граф Риба, соответствующий кобордизму рода один
узлов, в которых помимо четности хорд учитывается структура проход/переход. Исследованию
связи этих инвариантов с кобордантностью мы посвятим отдельную работу.
СПИСОК ЛИТЕРАТУРЫ
1. Афанасьев Д. М. Об усилении инвариантов виртуальных узлов с помощью четности// Матем. сб. —
2010. — 201, № 6. —С. 3–18.
2. Afanasiev D. On a generalization of the Alexander polynomial for long virtual knots// Knot Theory and
Its Ramifications J. — 2009. — 18, № 10. — С. 1329–1333.
3. Афанасьев Д. М., Мантуров В. О. О минимальных диаграммах виртуальных зацеплений// Доклады
РАН. Сер. матем. —2009. — 426, № 1. — С. 7–10.
4. Afanasiev D. M., Manturov V. O. On virtual crossing number estimates for virtual links// Knot Theory
and Its Ramifications J. 2009. — 18, № 6. — С. 757–772.
5. Alexander J. W. Topological invariants of knots and links// Trans. AMS. —1923. — 20. — С. 257–306.
6. Alexander J. W. A matrix knot invariant// Proc. Nat. Acad. Sci. USA. — 1933. — 19. — С. 222–275.
7. Arnold V. I. Topological invariants of plane curves and caustics. — Univ. Lect. Series, AMS, Providence
5, 1994. — viii+60 с.
8. Arnold V. I. Plane curves, their invariants, perestroikas and classifications// In: Singularities and
Bifurcations (Adv. Soviet Math., AMS, Providence). — 1994. — 21. — С. 33–91.
9. Artin E. Theorie der Zöpfe// Abh. Math. Sem. Univ. Hamburg. — 1925. — 4. — С. 27–72.
10. Asaeda M., Przytycki J., Sikora A. Categorification of the Kauffman bracket skein module of I-bundles
over surfaces// Algebraic and Geometric Topology. — 2004. — 4, № 52. — С. 1177–1210.
11. Bardakov V. G. The virutal and universal bradis// Fundamenta Mathematicae. — 2004. — 184. — С. 1–
18.
12. Bar–Natan D. On the Vassiliev Knot Invariants// Topology. — 1995. — 34. — С. 423–472.
13. Bar–Natan D. On Khovanov’s categorification of the Jones polynomial// Algebraic and Geometric
Topology. — 2002. — 2, № 16. — С. 337–370.
14. Bar–Natan D., Garoufalidis S. On the Melvin-Morton-Rozansky conjecture// Inv. Math. — 1996. —
125. — С. 103–133.
15. Bigelow S. Braid groups are linear// J. Amer. Math. Soc. — 2001. — 14. — С. 471–486.
16. Bigelow S. Does the Jones polynomial detect the unknot// Knot Theory and Its Ramifications J. —
2002. — 11. — С. 493–505.
17. Birman J. S. Braids, links and mapping class groups. Princeton, NJ: Princeton Univ. Press, 1975 (Ann.
Math. Stud., 1982).— 228 с.
18. Birman J. S. New points of view in knot theory// Bull. AMS. — 1993. — 28. — С. 283–287.
19. Blanchet C. An oriented model for Khovanov homology// Knot Theory and Its Ramifications J. — 2010. —
19 No 2. — С. 291–312.
20. Bloom J. Odd Khovanov homology is mutation invariant// Math. Res. Lett. — 2010. — 17, № 1. —
С. 1–10.
21. Bouchet A. Circle graph obstructions// Combinatorial Theory B J. — 1994. — 60. — С. 107–144.
22. Bouchet A. Multimatroids. I. Coverings by independent sets// SIAM J. Discrete Math. — 1997. — 10,
№ 4. — С. 626–646.
23. Bouchet A. Unimodularity and circle graphs// Discrete Math. — 1987. — 66. — С. 203–208.
9. Нерешенные задачи
147
24. Bouchet A, Cunningham W. H., Geelen J. F. Principally unimodular skew-symmetric matrices//
Combinatorica. — 1998. — 18, № 4. — С. 461–486.
25. Bourgoin M. O. Twisted Link Theory// Algebraic & Geometric Topology. — 2008. — 8, № 3. — С. 1249–
1279.
26. Burau W. Über Zopfgruppen und gleichzeitig verdrillte Verkettungen// Abh. Math. Sem. Univ.
Hamburg — 1936. — 11. — С. 179–186.
27. Cairns G., Elton D. The planarity problem for signed Gauss words// Knot Theory and Its Ramifications
J. — 1993. — 2. — С. 359–367.
28. Cairns G., Elton D. The planarity problem. II// Knot Theory and Its Ramifications J. — 1996. — 5. —
С. 137—144.
29. Carter J. S. Closed curves that never extend to proper maps of disks// Proc. AMS. — 1991. — 113,
№ 3. — С. 879–888.
30. Carter J. S., Saito M. Diagrammatic invariants of knotted curves and surfaces// unpublished
manuscript. — 1992.
31. Carter J. S., Kamada S., Saito M. Stable equivalence of knots on surfaces// Knot Theory and Its
Ramifications J. — 2002. — 11. — С. 311–322.
32. Carter J. S., Kamada S., Saito M. Surfaces in 4-space. — N.Y: Springer Verlag, 2004. — 213 c.
33. Cerf J. Sur les difféomorphismes de la sphère de dimension trois (Γ4 = 0). Lecture Notes in Mathematics,
53. — Berlin-New York: Springer-Verlag, 1968. — xii+133 с.
34. Champanerkar A., Kofman I. Spanning trees and Khovanov homology// arXiv:math.GT/0607510.
35. Chmutov S., Duzhin S. CDBook. Book about chord diagrams. Introduction to Vassiliev Knot Invariants. —
http://www.pdmi.ras.ru/ ∼duzhin/ papers/cdbook.ps.gz.
36. Chmutov S. V., Duzhin S. V., Lando S. K. Vassiliev Knot Invariants. I, II, III// Adv. Sov. Math. —
1994. — 21. — С. 117–147.
37. Chmutov S. V., Lando. S. K. Mutant knots and intersection graphs// Algebraic & Geometric Topology. —
2007. — 7. — С. 1579-–1598.
38. Chrisman M., Manturov V. O. Combinatorial Formulae for Finite-Type Invariants via Parities//
arXiv:math.GT/1002.0539.
39. Clark D., Morrison S., Walker K. Fixing the functoriality of Khovanov homology// Geometry &
Topology. — 2009. — 13, № 3 — С. 1499–1582.
40. Cohn M., Lempel A. Cycle decomposition by disjoint transpositions// Combin. Theory Ser. A J. —
1972. — 13. — С. 83–89.
41. Conway J. H. An enumeration of knots and links and some of their algebraic properties// In:
Computational Problems in Abstract Algebra (New York, Pergamon Press). — 1970. — С. 329–358.
42. Crapo H., Rosenstiehl. P. On lacets and their manifolds// Discrete Math. — 2001. — 233, № 1-3. —
С. 299–320.
43. Dehn M. Die beiden Kleeblattschlingen// Mathematische Annalen. — 1914. — 102. — С. 402–413.
44. Dehn M. Über die Topologie des dreidimensionalen Raumes// Mathematische Annalen. — 1910. — 69. —
С. 137–168.
45. Дроботухина Ю. В. Аналог многочлена Джоунса для зацеплений в RP 3 и обобщение теоремы
Кауфмана-Мурасуги// Алгебра и анализ. — 1990. — 2, No 3. — С. 171–191.
46. Дужин С. В., Карев М. В. Определение ориентации струнных зацеплений при помощи инвариантов
конечного типа// Функц. анализ и его приложения. — 2007. — 41, № 3. — С. 48–59.
47. Dye H. A. Detection and Characterization of Virtual Knot Diagrams// Ph.D. Thesis, University of Illinois
at Chicago, 2003.
48. Dye H. A., Kauffman L. H. Virtual knot diagrams and the Witten-Reshetikhin-Turaev Invariants// Knot
Theory and Its Ramifications J. — 2005. — 14, № 8. — С. 1045–1075.
49. Dye H. A., Kauffman L. H. Minimal Surface Representation of Virtual Knots and Links// arXiv:math.GT/
0401035v1.
50. Dye H. A., Kauffman L. H. Virtual Crossing Number and the Arrow Polynomial// Knot Theory and Its
Ramifications J. — 2009. — 18, № 10. — С. 1335–1357.
51. Dye H. A., Kauffman L. H., Manturov V. O. On two categorifications of the arrow polynomial for virtual
knots// The mathematics of knots, Contributions in the Mathematical and Computational Sciences. —
2010. — 1. — С. 95–127.
52. Eliahou Sh., Kauffman L. H., Thistletwaite M. Infinite families of links with trivial Jones polynomial//
Topology. — 2003. — 42. — С. 155–169.
53. Fenn R. A., Kauffman L. H., Manturov V. O. Virtual Knots: Unsolved Problems// Fundamenta
Mathematicae, Proceedings of the Conference “Knots in Poland-2003”. — 2005. — 188. — С. 293–323.
148
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
54. Filotti I. S., Miller G. L., Reif J. On determining the genus of a graph in O(v O(g) ) steps// In: Proc. XI
Annual Symp. on Theory of Computing (N.Y.: ACM Press). — 1979. — С. 27—37.
55. Flemming Th., Mellor B. Virtual Spatial Graphs// Kobe J. Math. — 2007. — 24. — С. 57–85.
56. Fomenko A. T. The theory of multidimensional integrable hamiltonian systems (with arbitrary many
degrees of freedom). Molecular table of all integrable systems with two degrees of freedom// Adv. Sov.
Math. — 1991. — 6. — С. 1–35.
57. Freyd P., Yetter D., Hoste J., Lickorish W. B. R., Millett K. C., and Ocneanu A. A new polynomial
invariant of knots and links// Bull. Amer. Math. Soc. — 1985. — 12. — С. 239–246.
58. Garoufalidis S. A conjecture on Khovanov’s invariants// Fundamenta Mathematicae. — 2004. — 184. —
С. 99–101.
59. Gauss C. F. Zur Mathematischen Theorie der electrodynamischen Wirkungen// Werke Köningl. Gesell.
Wiss. Göttingen. — 1877. — 5. — С. 605.
60. Mo-Lin Ge, Kauffman L. H. Yong Zhang, Virtual Extension of Temperley–Lieb Algebra// arXiv:math-ph/
0610052.
61. Ghier L. Double occurence words with the same alternance graph// ARS Combinatorice. — 1993. —
36. — С. 57–64.
62. Gibson A. Homotopy Invariants of Gauss Words// arXiv:math.GT/0902.0062.
63. Gibson A., PhD thesis.
64. Goldman W. Invariant functions on Lie groups and Hamiltonian flows of surface group representations//
Inventiones Mathematicae. — 1986. — 85. — С. 263–302.
65. Gordon C. McA., Luecke J. Knots are determined by their complements// J. Amer. Math. Soc. — 1989. —
2, № 2. — С. 371–415.
66. Goussarov M., Polyak M., and Viro O. Finite type invariants of classical and virtual knots// Topology. —
2000. — 39. — С. 1045–1068.
67. Гусаров М. Н. Новая форма полинома Джонса-Конвея для ориентированных зацеплений// Зап. научных семинаров ЛОМИ. — 1991. — 193, Геометрия и топология 1. — С. 4–9.
68. Haken W. Theorie der Normalflächen// Acta Mathematicae. — 1961. — 105. — С. 245–375.
69. Hass J., Scott P. Shortening curves on surfaces// Topology. — 1994. — 33, № 1. — С. 25–43.
70. Hemion G. The classification of knots and 3–dimensional spaces. — Oxford: Oxford Univ. Press, 1992. —
168 с.
71. Hrencecin D. On Filamentations and Virtual Knot Invariant// Thesis www.math.uic.edu/ ∼dhren/
FINALCOPY.ps.
72. Hrencecin D., Kauffman L. H. On Filamentations and Virtual Knots// Topology and its Applications. —
2003. — 134. — С. 23–52.
73. Hurwitz A. Über Riemannsche Fläche mit gegebenen Verzweigungspunkten// Math. Ann. — 1981. —
39. — С. 1–61.
74. Ilyutko D. P. Framed 4-Valent Graphs: Euler Tours, Gauss Circuits and Rotating Circuits//
arXiv:math.CO/0911.5504.
75. Ilyutko D. P. An Equivalence between the Set of Graph-knots and the Set of Homotopy Classes of Looped
Graphs// arXiv:math.GT/1001.0360.
76. Ильютко Д .П. Оснащенные 4-графы: эйлеровы циклы, гауссовы циклы и поворачивающие обходы//
Матем. сб. — 2011.. — в печати.
77. Ilyutko D. P., Manturov V. O. “Introduction to graph-link theory”, Knot Theory and Its Ramifications J.
18:6, 791—823 (2009).
78. Ильютко Д .П., Мантуров В. О. Граф-зацепления// Доклады РАН. Сер. матем. — 2009. — 428,
№ 5. — С. 591–594.
79. Ильютко Д .П., Мантуров В. О. Кобордизмы свободных узловДоклады РАН. Сер. матем. — 2009. —
429, № 4. — С. 439–441.
80. Ilyutko D. P., Manturov V. O. Graph-links// arXiv:math.GT/1001.0384.
81. Ishii A., Kamada N., Kamada S. The virtual magnetic Kauffman bracket skein module and skein relations
for the f-polynomial// Knot Theory and Its Ramifications J. — 2008. — 17, № 6. — С. 675—688.
82. Jablan S., Sazdanovic R. LINKNOT. Knot Theory by Computer, Series on Knots and Everything, Vol.
21. — World Scientific, 2007. — 500 с.
83. Jacobsson M. An invariant of link cobordisms from Khovanov’s homology theory// Algebraic and
Geometric Topology. — 2004. — 4. — С. 1211–1251.
84. Jaeger F., Kauffman L. H., and Saleur H. The Conway Polynomial in S 3 and Thickened Surfaces: A new
Determinant Formulation// Combin. Theory. Ser. B J. — 1994. — 61. — С. 237–259.
9. Нерешенные задачи
149
85. Jones V. F. R. A polynomial invariant for links via Neumann algebras// Bull. Amer. Math. Soc. —
1985. — 129. — С. 103–112.
86. Jones V. F. R. Hecke algebra representations of braid groups and link polynomials// Annals of
Mathematics. — 1987. — 126. — С. 335–388.
87. Jonsson J. On the number of Euler trails in directed graphs// Math. Scand. — 2002. — 90. — С. 191–214.
88. Kadokami S. Detecting non-triviality of virtual links// Knot Theory and Its Ramifications J. — 2003. —
6. — С. 781–819.
89. Kamada N. On the Jones polynomial of checkerboard colorable virtual knots// Osaka J. Math. — 2002. —
39, № 2. — С. 325–333.
90. Kamada N. A relation of Kauffman’s f -polynomials of virtual links// Topology and Its Applications. —
2005. — 146-147. — С. 123–132.
91. Kamada N., Kamada S. Abstract link diagrams and virtual knots// Knot Theory and Its Ramifications
J. — 2000. — 9, № 1. — С. 93–109.
92. Kamada N., Nakabo S., and Satoh S. A virtualized skein relation for Jones polynomial// Illinois Journal
of Mathematics. — 2002. — 46, № 2. — С. 467–475.
93. Kamada S. Braid presentation of virtual knots and welded knots// Osaka J. Math. — 2007. — 44, № 2. —
С. 441–458.
94. Kauffman L. H. On Knots. — Annals of Math Studies, Princeton University Press, 1987. — 498 с.
95. Kauffman L. H. Knots and Physics. — Singapore: World Scientific, 1991. — 788 с.
96. Kauffman L. H. State Models and the Jones Polynomial// Topology. — 1987. — 26. — С. 395–407.
97. Kauffman L. H. Combinatorics and knot theory// Contemporary Mathematics. — 1983. — 20. — С. 181–
200.
98. Kauffman L. H. Link manifolds and periodicity// Bull. Amer. Math. Soc. — 1973. — 79. — С. 570–573.
99. Kauffman L. H. Virtual knot theory// European Journal of Combinatorics. — 1999. — 20, № 7. —
С. 663–690.
100. Kauffman L. H. Detecting virtual knots// Atti. Sem. Math. Fis., Univ. Modena, Supplemento al vol.
IL. — 2001. — С. 241–282.
101. Kauffman L. H. Diagrammatic Knot Theory// in preparation.
102. Kauffman L. H. A Self-Linking Invariant of Virtual Knots// Fundamenta Mathematicae. — 2004. —
184. — С. 135–158.
103. Kauffman L. H. Virtual Knots// talks at MSRI Meeting, January 1997 and AMS meeting at University
of Maryland, College Park, March 1997.
104. Kauffman L. H., Lambropoulou S. Virtual braids// Fundamenta Mathematicae. — 2004. — 184. —
С. 159–186.
105. Kauffman L. H., Lambropoulou S. Virtual braids and the L-Move// Knot Theory and Its Ramifications
J. — 2006. — 15, № 6. — С. 773–811.
106. Kauffman L. H., Manturov V. O. Virtual Biquandles// Fundamenta Mathematicae. — 2005. — 188. —
С. 103–146.
107. Кауфман Л. Х., Мантуров В. О. Виртуальные узлы и зацепления// Труды математического института
РАН им. В.А.Стеклова. — 2006. — 252, № 1. — С. 114–133.
108. Kauffman L. H., Radford D. Bi-Oriented Quantum Algebras and a Generalized Alexander Polynomial for
Virtual Links// AMS Contemp. Math. — 2002. — 318. — С. 113–140.
109. Khovanov M. A categorification of the Jones polynomial// Duke Math. J. — 1997. — 101, № 3. —
С. 359–426.
110. Khovanov M. A functor-valued invariant of tangles// Algebraic and Geometric Topology. — 2002. — 2. —
С. 665-–741.
111. Khovanov M. Link homology and Frobenius extensions// arXiv.math:GT/0411447.
112. Khovanov M. Categorifications of the colored Jones polynomial// Knot Theory and Its Ramifications J. —
2005. — 14, № 1. — С. 111–130.
113. Khovanov M., Rozansky L. Matrix Factorizations and Link Homology// arXiv.math:GT/0401268.
114. Khovanov M., Rozansky L. Matrix Factorizations and Link Homology II// arXiv.math:GT/0505056.
115. Khovanov M., Rozansky L. Virtual crossings, convolutions and a categorification of the SO(2N )
Kauffman polynomial// arXiv.math:GT/0701333.
116. Kotzig A. Eulerian lines in finite 4-valent graphs and their transformations// In: Theory of Graphs (Proc.
Colloq., Tihany, 1966). — New York: Academic Press,1968. — С. 219–230.
117. Krammer D. Braid groups are linear// Ann. of Math. —2002. — 2, № 155. — С. 131–156.
118. Kronheimer P. B., Mrowka T. S. Khovanov homology is an unknot-detector// arXiv:math.GT/1005.4346.
119. Krylov D. Yu., Manturov V. O. Parity and Relative Parity in Knot theory// arXiv:math.GT/1101.0128.
150
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
120. Kuperberg G. What is a Virtual Link?// Algebraic and Geometric Topology. — 2003. —3. — С. 587–591.
121. Las Vergnas M. Eulerian circuits of 4-valent graphs imbedded in surfaces// In: Algebraic methods in
graph theory, Szeged 1978 (Colloq. Math. Soc. Janos Bolyai). — Amsterdam-New York: North-Holland,
1981. — 25. — С. 451–477.
122. Lee E. S. The support of the Khovanov’s invariants for alternating knots// arXiv:math.GT/0201105.
123. Lee E. S. On Khovanov invariant for alternating links// arXiv:math.GT/0210213.
124. Lins S., Richter B., and Shank H. The Gauss code problem off the plane// Aequationes Math. — 1987. —
33, № 1. — С. 81–95.
125. Lovász L., Marx M. A forbidden substructure characterization of Gauss codes// Acta Sci. Math.
(Szeged). — 1976. — 38, № 1–2. — С. 115–119, short version: Bull. Amer. Math. Soc. — 1976. —
82, № 1. — С. 121–122.
126. Lowrance A. Heegaard-Floer Homology and Turaev genus// arXiv:math.GT/0709.0720.
127. Manturov O. V., Manturov V. O. Free Knots and Groups// Knot Theory and Its Ramifications J. —
2009. — 18, № 2. — С. 181–186.
128. Мантуров В. О. Бифуркации, атомы и узлы// Вестник МГУ. Сер. Матем. — 2000. — 1. — С. 3–8.
129. Мантуров В. О. Атомы, высотные атомы, хордовые диаграммы и узлы. Перечисление атомов малой
сложности с использованием языка Mathematica 3.0.// Топологические методы в теории гамильтоновых систем. — М., Факториал, 1998. — С. 203–212.
130. Мантуров В. О. Скобочная полугруппа узлов// Мат. Заметки. — 2000. —67, № 4. — С. 549—562.
131. Мантуров В. О. Теория узлов. — Москва-Ижевск, РХД, 2005. — 512 с.
132. Мантуров В. О. Инвариантные полиномы виртуальных зацеплений// Труды ММО. — 2004. — 65,
№ 1. — С. 175–200.
133. Мантуров В. О. О распознавании виртуальных кос// Записки научных семинаров ПОМИ, Геометрия
и топология. — 2003. — 299, № 8. — С. 267–286.
134. Мантуров В. О. Инварианты виртуальных зацеплений// Доклады РАН. Сер. матем. — 2002. — 384,
№ 1. — С. 11–13.
135. Мантуров В. О. Атомы и минимальные диаграммы виртуальных зацеплений// Доклады РАН. Сер.
матем. — 2003. — 391, № 2. — С. 166–168.
136. Мантуров В. О. Полином Хованова для виртуальных узлов// Доклады РАН. Сер. матем. — 2004. —
398, № 1. — С. 15–18.
137. Мантуров В. О. Кривые на поверхностях, виртуальные узлы и полином Джонса-Кауфмана// Доклады
РАН. Сер. матем. — 2003. — 390, № 2. — С. 155–157.
138. Мантуров В. О. Инварианты конечного порядка виртуальных зацеплений и полином ДжонсаКауфмана// Доклады РАН. Сер. матем. — 2004. — 395, № 1. — С. 18–21.
139. Мантуров В. О. О длинных виртуальных узлах// Доклады РАН. Сер. матем. — 2005. — 401, № 5. —
С. 595–598.
140. Мантуров В. О. Инвариантный полином двух переменных для виртуальных зацеплений// Успехи
мат. наук. — 2002. — 57, № 5(347). — С. 141–142.
141. Мантуров В. О. Комплекс Хованова для виртуальных узлов// Фундаментальная и прикладная математика. — 2005. — 11, № 4. — С. 127–152.
142. Мантуров В. О. Доказательство гипотезы В. А. Васильева о планарности сингулярных зацеплений//
Известия РАН, Сер. Мат. — 2005. — 69, № 5. — С. 169—178.
143. Мантуров В. О. Комбинаторные вопросы теории виртуальных узлов// Математические вопросы кибернетики. — 2003. — 12. — С. 147–178.
144. Мантуров В. О. Комплекс Хованова и минимальные диаграммы узлов// Доклады РАН. Сер. матем. —
2006. — 406, № 3. — С. 308–311.
145. Мантуров В. О. Гомологии Хованова виртуальных узлов с произвольными коэффициентами// Известия РАН, Сер. Мат. — 2007. — 71, № 5. — С. 111–148.
146. Мантуров В. О. Вложения четырехвалентных оснащенных графов в двумерные поверхности// Доклады РАН. Сер. матем. — 2009. — 424, № 3. — С. 308–310.
147. Мантуров В. О. Дополнительные градуировки в гомологиях Хованова// Доклады РАН. Сер. матем. —
2008. — 420, № 2. — С. 168–171.
148. Мантуров В. О. Четность и кобордизмы свободных узлов// Матем. сб. — 2011. — в печати.
149. Мантуров В. О. Четность в теории узлов// Матем. сб. — 2010. — 201, № 5. — С. 65–110.
150. Мантуров В. О. Свободные узлы, группы и инварианты конечного порядка// Statu Nascendi.
151. Manturov V. O. Knot Theory. — CRC-Press, Boca Raton, 2004. — 416 с.
152. Manturov V. O. Multivariable polynomial invariants for virtual knots and links// Knot Theory and Its
Ramifications J. — 2003. — 12, № 8. — С. 1131–1144.
9. Нерешенные задачи
151
153. Manturov V. O. Kauffman–like polynomial and curves in 2–surfaces// Knot Theory and Its Ramifications
J. — 2003. — 12, № 8. — С. 1145–1153.
154. Manturov V. O. Vassiliev invariants for virtual links, curves on surfaces and the Jones-Kauffman
polynomial// Knot Theory and Its Ramifications J. — 2005. — 14, № 2. — С. 231–242.
155. Manturov V. O. Long virtual knots and their invariants// Knot Theory and Its Ramifications J. — 2004. —
13, № 8. — С. 1029–1039.
156. Manturov V. O. On Invariants of Virtual Links// Acta Applicandae Mathematicae. — 2002. — 72, № 3. —
С. 295–309.
157. Manturov V. O. Virtual Knots and Infinite-dimensional Lie algebras// Acta Applicandae Mathematicae. —
2004. — 83. — С. 221–233.
158. Manturov V. O. Flat Hierarchy// Fundamenta Mathematicae. — 2005. — 188. — С. 147–154.
159. Manturov V. O. Khovanov Homology for Virtual Links with Arbitrary Coefficients// Knot Theory and
Its Ramifications J. — 2007. — 16, № 3. — С. 345–377.
160. Manturov V. O. On Free Knots// arXiv:math.GT/0901.2214.
161. Manturov V. O. On Free Knots and Links// arXiv:math.GT/0902.0127.
162. Manturov V. O. Free Knots are Not Invertible// arXiv:math.GT/0909.2230v2.
163. Manturov V. O. Parity and Cobordisms of Free Knots// arXiv:math.GT/1001.2728.
164. Manturov V. O. Free Knots and Parity// arXiv:math.GT/09125348, v.1., to appear in: Proceedings of the
Advanced Summer School on Knot Theory, Trieste, Series of Knots and Everything. — World Scientific.
165. Manturov V. O. Additional Gradings in Khovanov homology// Topology and Physics. Dedicated to the
Memory of X-S.Lin, Nankai Tracts in Mathematics. — Singapore: World Scientific, 2008. — С. 266–300.
166. Manturov V. O. Embeddings of four-valent framed graphs into 2-surfaces// The mathematics of knots,
Contributions in the Mathematical and Computational Sciences. — 2010. — 1. — С. 209–238.
167. Manturov V. O. A Functorial Map from Knots in Thickened Surfaces to Classical Knots and
Generalisations of Parity// arXiv:math.GT/1011.4640.
168. Markoff A. A. Über die freie Äquivalenz der geschlossenen Zöpfe// Matem. sb. — 1936. — 1. — С. 73–78.
169. Matveev S. V. Algorithmic topology and classification of 3-manifolds. — N.-Y.: Springer Verlag, 2003. —
480 с.
170. McDougall A. A Diagramless Link Homology// arXiv:math.GT/0911.2518.
171. Mellor B. A few weight systems arising from intersection graphs// Michigan Math. J. — 2003. — 51. —
С. 509–536.
172. Menasco W. and Thistlethwaite M. A classification of alternating links// Annals of Mathematics. —
1993. — 138. — С. 113–171.
173. Miyazawa Y. Magnetic Graphs and an Invariant for Virtual Links// Knot Theory and Its Ramifications
J. — 2006. — 15, № 10. — С. 1319–1334.
174. Miyazawa Y. A multi-variable polynomial invariant for virtual knots and links// Knot Theory and Its
Ramifications J. — 2008. — 17, № 11. — С. 1311–1326.
175. Moran G. Chords in a circle and linear algebra over GF (2)// Combin. Theory Ser. A J. — 1984. — 37. —
С. 239–247.
176. Murasugi K. The Jones polynomial and classical conjectures in knot theory// Topology. — 1987. — 26. —
С. 187–194.
177. Nash-Williams C. St. J. A. Connected detachments of graphs and generalized Euler trails// J. London
Math. Soc. (2). — 1985. — 31, № 1. — С. 17–29.
178. Nelson S. Unknotting virtual knots with Gauss diagram forbidden moves// Knot Theory and Its
Ramifications J. — 2001. — 10, № 6. — С. 931–935.
179. Nikonov I. Khovanov homology of graph-links// arXiv:math.GT/1005.2812.
180. Nikonov I. Odd Khovanov homology of principally unimodular bipartite graph-links// arXiv:math.GT/
1006.0161.
181. Ohtsuki T. Quantum Invariants. A Study of Knots, 3-Manifolds, and Their Sets. — Singapore: World
Scientific, 2001. — 451 с.
182. Östlund Olof-Petter Invariants of knot diagrams and relations among Reidemeister moves//
arXiv:math.GT/0005108.
183. Ozsváth P., Rasmussen J., Szabó Z. Odd Khovanov homology// arXiv:math.QA/0710.4300.
184. Ozsváth P., Szabó Z. Holomorphic disks and knot invariants// Adv. Math. — 2004. — 186, № 1. —
С. 58-–116.
185. Polyak M., Viro O. Gauss diagram formulae for Vassiliev invariants// Int. Math Research Notices.—
1994. —11. — С. 445–453.
186. Rasmussen J. A. Khovanov Homology and the slice genus// arXiv:math.GT/0402131.
152
Д. П. ИЛЬЮТКО, В. О. МАНТУРОВ, И. М. НИКОНОВ
187. Rasmussen J. A. Floer homology and knot complements// PhD thesis, Harvard University, 2003,
arXiv:math.GT/0306378.
188. Rasmussen J. A. Some Differentials on Khovanov-Rozansky Homology// arXiv:math.GT/0607544.
189. Read R. C., Rosenstiehl P. On the Gauss crossing problem// Colloq. Math. Soc. Janos Bolyai.— NorthHolland, Amsterdam and New-York, 1976. — С. 843–876.
190. Reidemeister K. Knotentheorie.— Berlin: Springer, 1932.
191. Satoh S. Virtual knot presentation of ribbon torus-knots// Knot Theory and Its Ramifications J. —
2000. —9, № 4. — С. 531–542.
192. Sawollek J. On Alexander-Conway polynomials for virtual knots and links// Knot Theory and Its
Ramifications J. — 2003. — 12, № 6. — С. 767–779.
193. Sawollek J. An Orinetation-sensitive Vassiliev invarinats for virtual knots// arXiv:math.GT/0203123.
194. Shumakovitch A. Torsion of the Khovanov homology// arXiv:math.GT/0405474.
195. Шуберт Х. Алгоритм для разложения зацеплений на простые слагаемые// Математика. — 1966. —
10, № 4. — С. 57–104.
196. Silver D. S., Williams S. G. Alexander Groups and Virtual Links// Knot Theory and Its Ramifications
J. — 2001. — 10, № 1. — С. 151–160.
197. Silver D. S., Williams S. G. Alexander Groups of Long Virtual Knots// preprint. — 2004.
198. Soboleva E. Vassiliev Knot Invariants Coming from Lie Algebras and 4-Invariants// Knot Theory and Its
Ramifications J. — 2001. — 10, № 1. — С. 161–169.
199. Stoimenov A., Tchernov V., Vdovina A. The canonical genus of a classical and virtual knot// In:
Proceedings of the Conference on Geometric and Combinatorial Group Theory, Part II, Haifa 2000;
Geom. Dedicata. — 2002. — 95. — С. 215–225.
200. Thistlethwaite M. A spanning tree expansion for the Jones polynonial// Topology. — 1987. — 26. —
С. 297–309.
201. Thistlethwaite M. On the Kauffman polynomial of an adequate link// Invent. Math. — 1988. — 93,
№ 2. — С. 285–296.
202. Traldi L. Binary nullity, Euler circuits and interlace polynomials// arXiv:math.CO/0903.4405.
203. Traldi L. A bracket polynomial for graphs. II. Links, Euler circuits and marked graphs// Knot Theory
and its Ramifications J. — 2010. — 19. — С. 547–586.
204. Traldi L. A bracket polynomial for graphs. III. Vertex weights// arXiv:math.GT, math.CO/0905.4879.
205. Traldi L. A bracket polynomial for graphs, IV. Undirected Euler circuits, graph-links and multiply marked
graphs// arXiv:math.GT, math.CO/1003.1560.
206. Traldi L., Zulli L. A bracket polynomial for graphs// Knot Theory and its Ramifications J. — 2009. —
18. — С. 1681–1709.
207. Turaev V. G. A simple proof of the Murasugi and Kauffman theorems on alternating links// Enseignement
Mathématique (2). — 1987. — 33, № 3–4. — С. 203–225.
208. Тураев В. Г. Введение в комбинаторные кручения.— М.: МЦНМО, 2004. — 136 с.
209. Turaev V. G. Virtual strings and their cobordisms// arXiv:math.GT/0311185
210. Turaev V. G. Algebras of loops on surfaces, algebras of knots, and quantization// In: Braid Group, Knot
Theory and Statistical Mechanis (C. N. Yang and M. L. Ge, eds.), Math. Phys. — Signapore: World Sci.
Publ. — 1989. — 9. — С. 59–95.
211. Turaev V. G. Cobordisms of Words// arXiv:math.CO/0511513v2.
212. Turaev V. G. Topology of words// Proc. Lond. Math. Soc. — 2007. — 95, № 3. — С. 360—412.
213. Turaev V. G. Virtual open strings and their cobordisms// arXiv:math.GT/0311185v5.
214. Turaev V. G. Knots and words// arXiv:math.GT/0506390v1.
215. Turaev V. G. Skein quantization of Poisson algebras of loops on surfaces// Ann. Sci. École Norm. Sup. —
1991. — 4, № 24. — С. 635–704.
216. Turaev V. G., Turner P. Unoriented topological quantum field theory and link homology// Algebraic and
Geometric Topology. — 2006. — 6. — С. 1069-–1093.
217. Tutte W. T. A homotopy theorem for matroids I, II// Trans. Amer. Math. Soc. — 1958. — 88. —
С. 144–174.
218. Vassiliev V. A. Cohomology of knot spaces, in Theory of Singularities and its applications// Advances in
Soviet Mathematics. — 1990. — 1. — С. 23–70.
219. Vassiliev V. A. Complements of discriminants of smooth maps: topology and applications, 2nd extended
edition, Translations of Math. Monographs, 98. — AMS, Providence, RI, 1994. — 268 с.
220. Васильев В. А. Инварианты и когомологии первого порядка для пространств вложений самопересекающихся кривых в Rn // Известия РАН, Сер. Мат. — 2005. — 69, № 5. — С. 3–52.
Предметный указатель.
153
221. Vershinin V. On Homology of Virtual Braids and Burau Representation// Knot Theory and Its
Ramifications J. — 2001. — 18, № 5. — С. 795–812.
222. Viro O. Remarks on definition of Khovanov Homology// arXiv:math.GT/0202199.
223. Viro O. Virtual links and orientations of chord diagrams// Proceedings of the Gökova Conference-2005. —
International Press. — С. 187–212.
224. Vogel P. Algebraic structures on modules of diagrams// Institut de Mathématiques de Jussieu,
Prépublication 32, revised in 1997, http:///www.math.jussieu.fr/ vogel.
225. Wehrli S. Khovanov homology and Conway mutations// arXiv:math.GT/0301312.
226. Wehrli S. A spanning tree model for the Khovanov homology// Knot Theory and Its Ramifications J. —
2008. — 17, № 12. — С. 1561–1574.
227. Зенкина М. В., Мантуров В. О. Инвариант зацеплений в утолщенном торе// Записки научных
семинаров ПОМИ. — 2009. — 372. — С. 5–18.
ПРЕДМЕТНЫЙ
A–Структура, 18
A-Состояние, 97, 114
B–Структура, 18
B-Состояние, 98, 114
d-Диаграмма, 20, 30
k-Граф, 5
k-Преобразование, 21
k-Угольник, 47
Аксиоматика
четная ослабленная, 43
четности, 39, 42
Атом, 17
ориентируемый, 18
связный, 18
высотный, 18
Буквы
чередующиеся, 25
Цикл
четный, 131
эйлеров, 6, 20, 21
гауссов, 20, 22
нечетный, 131
примитивный, 131
Четность
двойной точки, 85
гауссова, 37, 85
двойной линии, 86
уточненная, 78, 87
уточненная, 77, 78
Число
компонент, 99
окружностей, 114
закрученности, 9, 99, 143
Дельта Тураева, 68
Диаграмма
альтернированная, 5
гауссова, 7
нечетная, 38
несократимая, 38
хордовая, 7
меченая, 94
ориентированная, 7
оснащенная, 22, 95
квазиальтернированная, 114
редуцированная, 114
связная, 6
узла, 5
виртуальная, 8
связная, 8
виртуального зацепления, 8
Диаграммы хордовые
кобордантные, 74
Диск
затягивающий, 74
Длина полинома Лорана, 16
Дуга, 5
Движение
Рейдемейстера, 6, 39, 126
чисто виртуальное, 9
объезда, 8
полувиртуальное, 9
УКАЗАТЕЛЬ
увеличивающее, 9
запрещенное, 12
Фильтрация, 53
Функция
Морса, 88
простая, 88
Гомологии Хованова
граф-зацеплений, 123
нечетные PU-граф-зацеплений, 139
Гомотопический класс
нереализуемый, 93, 109
петлевых графов, 92, 99
свободный, 99
реализуемый, 99
свободный, 93
Градуировка, 53
Граф
k-валентный, 5
Риба, 89
адекватный, 115
альтернированный, 115
главно унимодулярный, 131
меченый, 96
минимальный, 112
нераспадающейся, 115
нереализуемый, 96
оснащенный, 5, 96
пересечений, 96
меченый, 96
петлевой, 92, 98
реализуемый, 96
стабильно четный, 130
свободный оснащенный, 98
реализуемый, 98
уникурсальный, 23
PU-ориентированный, 127
Граф-преобразование, 96
Граф-узел, 92, 99
главно унимодулярный, 143
Граф-зацепление, 97
нереализуемое, 93, 109
реализуемое, 99
свободное, 93, 98
PU-ориентированное, 130
Грань
четная, 136
нечетная, 136
Хорда, 7
четная, 37
гауссова, 22
нечетная, 37
негауссова
с оснащением 0, 22
с оснащением 1, 22
Хорды
незацепленные, 7
зацепленные, 7, 25
Индекс, 54
хорды, 54
самозацепления, 16
Изоморфизм, 5
154
Предметный указатель.
Изотопия, 4, 6
Касп, 82
Категорификация, 117
Кобордизм
элементарный, 74
комбинаторный, 74
слов, 74
Количество компонент, 41
Компонента, 8
уникурсальная, 8, 9
зацепления, 4
Конфигурация
четная симметричная, 74
Кривая
левая, 68
нуль-кобордантна, 73
правая, 68
срезанная, 73
Кривые
гомотопные, 67
Линия
двойная, 81, 84
Локальное дополнение, 32, 96
Матрица смежности, 25, 126
Метка, 89
Многоугольник, 47
Молекула, 89
Накрытие
ориентирующее, 18
Обход
поворачивающий, 20, 22
Образ
зеркальный, 21
Окружность, 7
Ориентация
альтернированная, 19
главно унимодулярная, 127
вполне унимодулярная, 128
Оснащение
хорды, 94
вершины, 96
Остов атома, 17
Отображение
проекционное, 53
Отрезок
нечетный
первого типа, 81
второго типа, 81
Переход, 5
Перекресток, 5
четный, 43
нечетный, 16, 43
первого типа, 78
второго типа, 78
отрицательный, 5
плоский классический, 12
положительный, 5
виртуальный, 7
Перестройка, 43
Перестройка вдоль множества хорд, 25
Петля
свободная, 5
Погружение
общего вида, 73
Полином
Джонса, 114, 143
четный, 72
Джонса-Кауфмана, 16
Поверхность
затягивающая, 82
Предложение
гауссово, 38
Представитель
минимальный, 60
Преобразование
Рейдемейстера, 6
шарнирное, 32, 96
Проход, 5
Расстановка знаков, 118, 136
типа X, 136
типа Y, 136
Расстояние, 114
Разведение, 43, 56
1-четное, 56
четное, 56
перекрестка, 16
свободного оснащенного графа, 109, 110
Ребра
эквивалентные, 9
противоположные, 5
Ребро, 5
атома, 18
циклическое, 5
Результат перестройки, 25
Род
Тураева, 18
атома, 18, 115
кобордизма, 82
срезанный, 73, 82, 83
виртуального зацепления, 18
Сечение
регулярное, 78
сингулярное, 78
Скобка Кауфмана, 16, 114, 143
четная, 71
Скручивание Дена, 12
Слово
циклическое, 21
гауссово, 38
оснащенное, 22, 23
с двойным вхождением, 21, 23
Сложность, 6
Состояние, 56, 119, 126
диаграммы, 16
графа, 114
противоположное, 114
Состояния
соседние, 114
Спаривание
гомологическое, 84
Степень, 5
Сторона, 47
Страт
первого типа, 87
второго типа, 87
Структура
источник-сток, 19, 31
противоположных ребер, 5, 18
155
156
Тангл
свободный, 57
Тень, 6
Теория
квазиузлов, 13
псевдоузлов, 13
свободных узлов, 12
Точка распадения, 114
Трилистник, 5
Унимодулярность
шлавная, 126
Узел, 4, 42
Кишино, 41
классический, 4
нуль-кобордантный, 83
ориентированный, 4
плоский виртуальный, 12
срезанный, 83
свободный, 37, 41, 93
длинный, 41
тривиальный, 41
тривиальный, 5
трубчатый, 12
виртуальный, 7, 8
Узлы
изотопные, 4
кобордантные, 82
комбинаторно кобордантные, 74
Вершина
атома, 18
четная, 42, 111
относительно разведения, 111
гауссова, 22
концевая, 56
нечетная, 42, 111
относительно разведения, 111
негауссова
с оснащением 0, 22
с оснащением 1, 22
ориентированная, 110
внешняя, 135
внутренняя, 135
Ветвь, 5
Высотность, 18
Виртуализация, 12
Восьмерка, 5
Зацепление, 4
классическое, 4
крашеное, 5
ориентированное, 5
свободное, 41, 93
тривиальное, 41
виртуальное, 7, 8
Замена обхода, 32
Значение
неособое, 88
Знак
хорды, 94
вершины, 96
Звездочка
оснащенная, 23
4-Граф
минимальный, 60
упрощаемый, 60
Предметный указатель.
PU-граф, 131
PU-граф-узел, 143
PU-граф-зацепление, 131
Предметный указатель.
Д. П. Ильютко
Механико-математический факультет МГУ им. М. В. Ломоносова
E-mail: ilyutko@yandex.ru
В. О. Мантуров
Факультет физико-математических и естественных наук РУДН
E-mail: vomanturov@yandex.ru
И. М. Никонов
Механико-математический факультет, МГУ им. М. В. Ломоносова
E-mail: nim@mail.ru
157