КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ ЛАБОРАТОРНЫЙ ПРАКТИКУМ
реклама

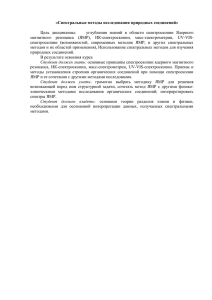
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО КУРСУ МАГНИТНАЯ РАДИОСПЕКТРОСКОПИЯ (ЧАСТЬ ПЕРВАЯ) ЛАБОРАТОРНАЯ РАБОТА СТАЦИОНАРНЫЙ ЯДЕРНЫЙ МАГНИТНЫЙ РЕЗОНАНС В ТВЁРДЫХ ТЕЛАХ КАЗАНЬ 2010 УДК 537.635, 537.611.43 ББК 22, 28 Утверждено учебно-методической комиссией физического факультета Казанского государственного университета Председатель комиссии проф. /Таюрский Д. А./ Лабораторный практикум по курсу “Магнитная радиоспектроскопия” (часть первая). Издание второе, исправленное и дополненное. Аннотация В методическом пособии к лабораторной работе “Стационарный ядерный магнитный резонанс в твёрдых телах” для студентов четвёртого курса изложены основы теории ЯМР в диамагнитных диэлектрических кристаллах и экспериментальные принципы детектирования сигналов ЯМР стационарными методами, а также методика расчёта формы линии ЯМР, полученной в эксперименте. В пособии приведено краткое описание устройства и принципа работы лабораторной установки. Составители: Теплов М. А., Тагиров М. С., Егоров А. В., Кудряшов А. А. Мамин Г. В. Рецензент: зав. кафедрой молекулярной физики КГУ, док. ф.– м. н., проф. Скирда В. Д. Физический факультет Казанского государственного университета, 2010 2 СОДЕРЖАНИЕ Стр. П р е д и с л о в и е…………………………………………………………………..4 1. ОСНОВЫ ТЕОРИИ ЯМР В ТВЁРДЫХ ТЕЛАХ……….……………………...4 1.1. Движение свободных ионов……………………………………………......4 1.2. ЯМР в системах связанных спинов………………………………....…......8 1.3. Диполь-дипольные взаимодействия в жёсткой решётке………….…….18 1.4. Метод моментов и форма линии ЯМР……………………………………23 1.5. Вычисление моментов………………………………………...………......26 2. СТАЦИОНАРНЫЕ МЕТОДЫ ДЕТЕКТИРОВАНИЯ………………………..31 2.1. Метод Q-метра……………………………………………………….........32 2.2. Мостовой метод……………………………………………………….......34 2.3. Метод скрещенных катушек (Блоха)…………………………………….35 2.4. Автодинный детектор (генератор слабых колебаний)…………..….......36 2.5. Двойная модуляция…………………………………………….…...…….38 2.6. Синхронный детектор…………………...……………………….……….40 3. ОПИСАНИЕ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ.……………...…....43 3.1. Назначение спектрометра и его технические характеристики.………..43 3.2. Структурная схема установки и принцип работы…...……..……….......43 4. ЗАПИСЬ И ОБРАБОТКА СПЕКТРОВ ЯМР……………………………….....47 4.1. Программа регистрации спектров ЯМР…………….…………………...47 4.2. Программа расчёта значений магнитного поля…………………….......49 4.3. Программа выделения части спектра с линией ЯМР и вычисления ширины линии………………………………………..…………………………….49 З а д а н и е…..………………………………………………………..…….............52 П р и л о ж е н и я…………………………………………………..…...………….52 П1. Сведения о кристалле CaF2….…………………………..…………..........52 П2. Вычисление моментов экспериментальных кривых….…..……..……...53 3 Предисловие Целью данной работы является ознакомление с основами теории ядерного магнитного резонанса (ЯМР) в диамагнитных диэлектрических кристаллах и с экспериментальными принципами детектирования сигналов ЯМР стационарными методами. Небольшой объём руководства не позволяет осветить с необходимой глубиной даже основные аспекты стационарного ЯМР. Поэтому руководство можно рассматривать лишь как элементарное введение в ЯМР, а строгое и последовательное изложение вопросов теории и эксперимента следует искать в следующих монографиях: 1. Абрагам, А. Ядерный магнетизм / А. Абрагам. – М.: ИЛ, 1963. – 553 с. 2. Сликтер, Ч. Основы теории магнитного резонанса / Ч. Сликтер. – М.: Мир, 1967. – 448 с. 3. Лёше, А. Ядерная индукция / А. Лёше. – М.: ИЛ, 1963. – 224 с. 4. Гольдман, М. Спиновая температура и ЯМР в твёрдых телах / М. Гольдман. – М.: Мир, 1972. – 342 с. 1. Основы теории ЯМР в твёрдых телах 1.1. Движение свободных ионов Понятие “свободный ион” подразумевает, что магнитный момент ядра или атома не испытывает взаимодействия с другими атомами вещества, и, строго говоря, применимо лишь к очень разреженным газам. В твёрдых телах атомы связаны друг с другом силами электростатического и магнитного взаимодействия; однако приближение свободных спинов оказывается здесь полезным для установления характера движения элементарных магнитных моментов под действием постоянного и переменного магнитных полей. Ядерный момент количества движения G выражают через безразмерный спиновый вектор I и записывают в виде G = ħI, 4 где h 2 – постоянная Планка. Величиной ядерного спина I называют максимально возможное значение компоненты I в каком-нибудь направлении (например, заданном внешним магнитным полем). Ядерный спин не идентичен с длиной спинового вектора, а связан с ней соотношением I I I 1 . Ядерный магнитный дипольный момент параллелен или антипараллелен вектору момента количества движения G, поэтому мы можем написать = G = I. Величина , называемая гиромагнитным отношением, положительна, если магнитный момент параллелен спиновому, и отрицательна в противном случае. Ядерные магнитные моменты принято измерять в ядерных магнетонах N 0,505 1023 эрг Гс (ср. с магнетоном Бора В 0,927 1020 эрг Гс ). На магнитный диполь , помещенный в магнитное поле H, действует момент силы μH . Этот момент силы вызывает изменение во времени вектора момента количества движения G, так что мы можем записать dG μH или dt dG GH . dt (1) Согласно решению этого уравнения, векторы G и прецессируют вокруг направления поля H с угловой скоростью ω0 H . Каким представится это движение наблюдателю, если он находится в системе координат, которая вращается вокруг оси, совпадающей с направлением вектора Н? Если такая система координат вращается относительно лабораторной системы координат с угловой скоростью , то производная dG dt , вычисленная в лабораторной системе, и аналогичная производная DG Dt , вычисленная во вращающейся системе, связываются уравнением dG dt DG Dt ωG . Комбинируя это уравнение с предыдущим, мы получаем уравнение движения 5 момента G во вращающейся системе координат DG Dt G H ω . (2) Это уравнение похоже на исходное, но отличается от него тем, что вместо Н мы имеем теперь H ω . Таким образом, движение векторов G и μ во вращающейся системе координат также представляет собой прецессию, но с угловой скоростью ω H H ω ω 0 ω. (3) Как и следовало ожидать, эта кажущаяся скорость прецессии равна разности между частотой Лармора ω0 и угловой частотой вращения подвижной системы координат относительно фиксированной. Иначе говоря, во вращающейся системе координат действует эффективное магнитное поле, параллельное оси z и равное H H ω H H , (4) где H ω . Ясно, что при выполнении равенства ω ω 0 прецессия исчезает, и оба вектора G и становятся неподвижными во вращающейся системе координат; это соответствует равенству H нулю эффективного поля H . Используя полученный результат, легко H ω H H EFF определить движение моментов при одновременном воздействии постоянного поля H, которое мы предполагаем направленным вдоль оси z декартовой системы координат, и 0 H1 Рис.1 поля H1, вращающегося вокруг оси z с угловой скоростью (см. рис.1). Очевидно, если мы перейдем к координатной системе, также вращающейся вокруг оси z с угловой скоростью , то поле H1 представится в этой системе постоянным вектором, перпендикулярным оси z. В то же время постоянное 6 поле Н должно быть заменено эффективным полем H H ω H H . Теперь уравнение движения момента G во вращающейся системе координат принимает вид DG Dt G H H1 G H EFF . (5) Здесь H EFF – векторная сумма H и H1 . Это уравнение движения также имеет форму исходного уравнения. Следовательно, во вращающейся системе координат момент количества движения G и магнитный момент будут испытывать прецессию вокруг вектора H EFF с угловой скоростью H EFF . Предположим, что ω ω0 , и что вращающееся поле H1 включается мгновенно в момент времени t 0 , когда магнитный момент направлен вдоль поля H H 0 . Тогда движение магнитного момента будет представлять собой прецессию вокруг вектора H1 , причем в течение каждого полупериода этого движения направление будет меняться от параллельного полю Н до антипараллельного и наоборот. Во вращающейся системе координат это движение происходит в плоскости, перпендикулярной H1 . Поскольку H1 H, частота прецессии вокруг H1 намного меньше 0 ; так что в лабораторной системе координат движение вектора представляет собой быстрое вращение вокруг поля Н с одновременным медленным изменением угла (,H) от 0 до и обратно. Если частота вращения H1 не равна ларморовской частоте прецессии, магнитный момент во вращающейся системе координат прецессирует вокруг поля H EFF . Это поле составляет с направлением Н угол , определяемый выражением tg H1 H H1 H . (6) Значение угла в момент времени t (предполагается, что = 0 при t = 0) находится из простых геометрических соотношений (см. рис.2): 7 sin 1 sin sin H EFF t , 2 2 (7) 1 cos 1 2sin 2 sin 2 H EFF t , 2 12 2 2 где H EFF 0 H1 . Ясно, что максимальное значение равно 2 и, если H1 H (нормальный случай), это значение велико только тогда, когда величина достаточно близка к 0 . H Таким H ω H H EFF характер; возможности заметно μ t в этой изменить момента воздействия относительно вращающимся полем H1 малым и состоит явление магнитного резонанса. Когда H1 Рис.2 магнитного носит относительно постоянного поля Н путём μ 0 0 эффект резонансный ориентацию H EFF t образом, 0, магнитный момент под действием вращающегося поля H1 может быть повёрнут на 180. В идеальном случае это произойдёт при любом значении поля H1 , каким бы малым оно не было, хотя, конечно, скорость переворачивания пропорциональна величине H1 . 1.2. Магнитный резонанс в системах связанных спинов 1. Имея дело со связанной системой постоянных магнитных диполей, удобнее оперировать намагниченностью М или магнитным моментом всей системы, нежели магнитными моментами индивидуальных частиц. Магнитный момент всей системы представляет собой просто векторную сумму отдельных 8 магнитных моментов. Поэтому в целом система спинов будет подчиняться классическому уравнению движения dM dt MH . Нас интересуют системы, в которых (8) индивидуальные диполи слабо взаимодействуют друг с другом, т.е. такие, для которых статическая магнитная восприимчивость в приближении высоких температур H/kT 1 подчиняется закону Кюри: 0 N 22 I I 1 3kT (9) (N – число частиц). 2. Особенности магнитного резонанса в системе связанных спинов мы учтём, отказавшись от предположения, что все изменения ориентации и величины намагниченности всецело обусловлены внешними магнитными полями, и приняв во внимание дополнительно два основных типа внутренних взаимодействий в конденсированных средах: 1) взаимодействие диполей с тепловыми колебаниями решётки и 2) взаимодействие их друг с другом. Оба этих взаимодействия обычно намного слабее зеемановского взаимодействия с внешними полями, но имеют значение благодаря их совокупному действию в течение длительных промежутков времени. Основное различие между ними состоит в том, что только первое взаимодействие (тепловые возмущения) может изменить энергию спин-системы, тогда как второе оставляет эту энергию неизменной. Основную часть энергии спин-системы составляет зеемановская энергия в постоянном магнитном поле MH M z H . Следовательно, основные изменения в энергии обязаны изменениям компоненты намагниченности M z . Предположим, что в какой-то момент времени компонента намагниченности Mz не равна своему равновесному значению M 0 0 H . Мы можем предположить (и это предположение оказывается хорошим приближением к действительности), что восстановление намагниченности происходит по экспоненциальному закону в соответствии с дифференциальным уравнением 9 M z M z M 0 T1 . (10) Здесь T1 – характеристическая постоянная времени, иногда называемая временем “продольной релаксации”, поскольку она определяет изменения M z -компоненты, параллельной постоянному магнитному полю. Часто эту константу называют временем “спин-решёточной релаксации”, поскольку она связана с обменом энергией между спин-системой и решёткой, в которую внедрены диполи. Взаимодействие двух одинаковых диполей в сильном поле Н может быть описано с классической точки зрения следующим образом. Первый диполь μ1 прецессирует с ларморовой частотой вокруг поля Н и, следовательно, обладает постоянной составляющей вдоль этого поля и составляющей, которая вращается в плоскости, перпендикулярной полю. Постоянная составляющая μ1 создаёт в месте расположения диполя μ 2 слабое постоянное поле ( 1 r 3 ), ориентация которого относительно Н зависит от взаимного расположения спинов. Поскольку Н – сильное поле, то на него заметно влияет только параллельная или антипараллельная ему составляющая слабого поля. Каждый спин в решётке имеет несколько соседей с различными относительными положениями и ориентациями, поэтому постоянная составляющая локального поля имеет разные значения в различных местах, что приводит к разбросу ларморовских частот и уширению линии резонансного поглощения. Вращающаяся составляющая μ1 создает в месте расположения μ 2 локальное магнитное поле, вращающееся с ларморовской частотой μ1 , которая совпадает с ларморовской частотой для μ 2 . В свою очередь она имеет составляющую в плоскости, перпендикулярной Н, и, следовательно, может заметно изменить ориентацию μ 2 благодаря явлению резонанса. Соответствующая ширина линии должна быть порядка величины вращающегося поля. В рассматриваемом случае оно того же порядка величины, что и локальное постоянное поле, и, следовательно, вносит в уширение вклад сравнимой величины. 10 3. Здесь следует остановиться на различии между однородным и неоднородным уширениями. Линия считается неоднородно уширенной, если ширина обусловлена разбросом ларморовских частот различных магнитных моментов в образце. неоднородности Причины внешнего такого магнитного разброса поля до разнообразны локальных – от изменений гиромагнитного отношения , вызванных взаимодействием диполей с их окружением. Какова бы ни была причина, неоднородное уширение имеет одну общую особенность: потеря фазовой когерентности, вызванная веерообразным расхождением индивидуальных прецессирующих диполей в плоскости xy, не является необратимой. Существует метод, известный под названием “спиновое эхо”, с помощью которого фазовая когерентность может быть восстановлена. Если ширина линии в целом обусловлена релаксационными эффектами, то резонансная линия считается “однородно уширенной”. Прецессирующие компоненты дипольного поля индуцируют так называемые “флип-флоп” переходы, при которых один диполь теряет энергию, а другой приобретает её. Флип-флоп процесс наиболее эффективен тогда, когда диполи прецессируют с одинаковой частотой. При такой взаимной переориентации моментов суммарное значение M z сохраняется, и полная энергия системы остаётся неизменной. Полные значения M x и M y , напротив, не сохраняются; в результате переориентации спинов происходит постепенное разрушение фазовой когерентности между компонентами индивидуальных диполей в плоскости xy, и прецессирующая намагниченность в этой плоскости постепенно уменьшается до нуля. Флип-флоп процесс задаёт “истинное” время поперечной или спин-спиновой релаксации T2 . Следуя Блоху, предположим, что компоненты намагниченности M x и M y подчиняются дифференциальным уравнениям M x M x T2 , M y M y T2 . (11) 4. Как и раньше, мы предполагаем, что система спинов подвержена действию постоянного магнитного поля, направленного вдоль оси z, и поля H1, 11 вращающегося с частотой в плоскости xy и имеющего компоненты H1x H1 cos t , H1 y H1 sin t. Распишем уравнение движения намагниченности (8): M x M y H M z H1 sin t , M M H M H cos t , y x (12) z 1 M z H1 M x sin t M y cos t . С учётом релаксационных эффектов они могут быть представлены в виде M x HM y M x T2 H1M z sin t , M y HM x M y T2 H1M z cos t , (13) M z M z M 0 T1 H1 M x sin t M y cos t . Впервые эти уравнения были даны Блохом. Нужно отметить, что в отличие от уравнения (10), действительного для любого агрегатного состояния вещества, уравнения (11) справедливы, строго говоря, только для магнитных моментов, находящихся в быстром движении друг относительно друга, т.е. для жидкостей и газов. Из уравнения (11) следует, что спад амплитуды поперечной намагниченности во времени происходит по экспоненциальному закону. Можно показать, что экспоненциальный спад поперечной намагниченности exp t T2 отвечает лоренцевой форме резонансной линии f T2 1 1 0 2 T22 1 2 0 2 (14) ( T21 – ширина линии). Однако известно, что линии магнитного резонанса в твёрдых телах чаще всего имеют форму, близкую к гауссовой. Ниже мы получим решения уравнений движения намагниченности (13) для случая медленного прохождения через резонанс. Хотя эти решения нельзя считать адекватно описывающими магнитный резонанс в твёрдых телах, их можно использовать для анализа качественной стороны явления. 12 Будем искать стационарное решение, соответствующее вынужденной прецессии намагниченности вокруг постоянного магнитного поля с угловой скоростью приложенного поля H 1 : M x M sin cos t , (15) M y M sin sin t , M z M cos . В дальнейшем удобно заменить поперечные компоненты M x и M y на M M x iM y M sin exp i t , M M x iM y M sin exp i t . (16) Предположим, что скорость прохождения через резонанс очень мала, и во все моменты времени преобладают стационарные условия: M z const или M z 0. Тогда уравнения Блоха принимают такой вид: M i HM M T2 i M z H1 exp i t , M i HM M T2 i M z H1 exp i t , M z M0 (17) 1 T1 i M exp it M exp i t H1. 2 Имея в виду, что M i M , M i M (см. (16)), из первых двух уравнений (17) находим M H1M z exp i t , H i T2 (18) H1M z M exp i t . H i T2 Подставив эти решения в третье уравнение Блоха (17), получаем выражение для продольной намагниченности 0 H : 2 Mz 1 0 T22 1 0 2 T22 2 H12T1T2 M0, (19) 13 из которого видно, что компонента M z практически всегда равна M 0 и даже при резонансе отличается от M 0 мало, если 2H12T1T2 1. Комбинация (18) и (19) даёт выражение для компонент поперечной намагниченности: 0 T2 i H1T2 exp i t M M 0. 2 2 2 2 1 0 T2 H1 T1T2 (20) В целом, решения (19), (20) соответствуют прецессии вектора намагниченности вокруг поля Н под углом к нему таким, что tg M H1T2 . 2 2 1 2 Mz 1 0 T2 (21) В большинстве экспериментов прохождение через резонанс осуществляется путём изменения поля Н, а частота сохраняется при этом постоянной. Поэтому величину tg удобно выразить через магнитные поля. Имея в виду, что H – резонансное поле для частоты , а H 1 T2 – ширина резонансной линии, мы можем переписать (21) в следующем виде: tg H1 Обычно, при изучении 12. H 2 H H 2 магнитного резонанса стационарным (22) методом амплитуда осциллирующего поля выбирается намного меньше ширины линии; поэтому угол даже при резонансе близок к нулю. Выясним, как ведёт себя при резонансе проекция намагниченности на плоскость, перпендикулярную постоянному полю Н. Угол, который составляет эта проекция с вектором осциллирующего поля H1 , можно найти из выражения tg Mx My M M . M M (23) Подстановка (18) в (23) даёт: tg T2 H 14 1 H . H H (23 a) Таким образом, при прохождении резонанса ориентация вектора поперечной намагниченности относительно поля H1 изменяется от параллельной до антипараллельной; при резонансе H H вектор поперечной намагниченности составляет с H1 угол 2. 5. Осциллирующая часть намагниченности может быть выражена через комплексную восприимчивость: M H1 exp i t . (24) Пользуясь (24), запишем выражения для действительной и мнимой частей комплексной восприимчивости: M H1 exp i t i . 0 M0 H 0 0 (25) Подставив (20) в (25), получаем: 0 0 , 2 0 2 2 H 2T 0 1 1 0 0 (26) 2 2 2 H12T1 0 (в формулах (26) использовано обозначение 1 T2 ). Таким образом, действительная часть восприимчивости при резонансе равна нулю, а в стороне от резонанса она либо положительна (если 0 ), либо отрицательна (если 0 ). Мнимая часть восприимчивости при резонансе имеет максимум и, если 2 H12T1 , то 0 0 . (27) Это означает, что мнимая часть комплексной восприимчивости намного больше статической восприимчивости, если ширина линии мала по сравнению с резонансной частотой. Поэтому резонансные методы в 0 раз чувствительнее статических. 15 6. Выше отмечалось, что при выполнении условия 2 H12T1T2 1 величина продольной компоненты намагниченности отличается от М0 незначительно даже в момент резонанса. При резонансе величина Mz 1 1 2 H12 T1T2 M0 (28) может оказаться малой только вследствие эффекта насыщения резонансной линии сильным радиочастотным полем H1 . Это происходит потому, что спинсистема поглощает энергию осциллирующего поля с некоторой скоростью dW dt , и это поглощение повышает температуру спин-системы до тех пор, пока dW dt не сравняется со скоростью передачи энергии от спин-системы к решётке. Естественно, температура спин-системы возрастает с увеличением H1 тем больше, чем длиннее времена спин-решёточной ( T1 ) и спин-спиновой ( T2 ) релаксаций. 7. Какова же скорость поглощения энергии радиочастотного поля спинсистемой? Другими словами, какова поглощаемая мощность? Имеем dH y dH x dW dH M M x My , dt dt dt dt (29) где H x H1 cos t , H y H1 sin t. Подставив в (29) выражения для компонент поперечной намагниченности M x Re M Re H1 exp i t H1 cos t sin t , M y Im M H1 cos t sin t (30) и произведя усреднение, получаем dW H12 . dt (31) Таким образом, мощность, поглощаемая при резонансе, пропорциональна мнимой части комплексной восприимчивости. По этой причине эту величину часто называют просто поглощением. 16 8. Частотная зависимость задаёт форму линии резонансного поглощения. В микроскопической теории показывается, что в общем случае мнимая часть комплексной восприимчивости связана со статической восприимчивостью соотношением f 0 , (32) где f – так называемая функция формы линии, удовлетворяющая условию нормировки: 0 f d 1. (33) При подходящем выборе функции формы линии f выражение (32) подобно выражению (27), полученному нами из макроскопических уравнений. Действительно, формулу (27) легко получить из формулы (32), подставив в последнюю лоренцеву функцию формы (14). 9. В выражении (32), как мы видим, отсутствуют квантово-механические величины. Это является следствием так называемых соотношений КрамерсаКронига, которые связывают действительную и мнимую части комплексной восприимчивости. Вывод этих соотношений приведен в монографии [1]. В применении к нашей задаче соотношения Крамерса-Кронига могут быть представлены в виде 1 d , 0 2 2 d 2 . 0 2 (34) Из первого соотношения следует, что статическая магнитная восприимчивость равна 0 0 1 0 d. (35) Действительно, подставив в (35) мнимую часть восприимчивости из (32), получаем 17 1 0 d 0 0 f d 0 . Здесь следует отметить, что формулы (26) для и , полученные нами из макроскопических уравнений движения намагниченности, содержат члены с H1 и удовлетворяют соотношениям Крамерса-Кронига только в предельном случае малых H1 . При больших амплитудах H1 наступает насыщение, температура спин-системы становится выше температуры кристаллической решётки, и намагниченность перестаёт быть линейной функцией H1 . Соотношения же Крамерса-Кронига справедливы только для линейных систем. 1.3. Диполь-дипольные взаимодействия в жёсткой решётке Уширение резонансных линий обусловлено целым рядом физических причин. Самой простой из них является неоднородность приложенного постоянного магнитного поля. В обычных магнитах, создающих магнитные поля 104 Гс, отклонение магнитного поля от среднего значения составляет несколько десятых долей гаусса; при помощи специальных сложных приспособлений это значение может быть снижено до нескольких миллигаусс. Однородность поля в пределах магнитного образца зависит от размеров образца. Обычно используются образцы, объёмы которых лежат в пределах от 0,1 см3 до нескольких кубических сантиметров. Для ядер, обладающих электрическими квадрупольными моментами, может наблюдаться несколько резонансных линий. Появление таких линий связано с взаимодействием ядерного квадрупольного момента с электрическим полем кристалла. Это приводит к существенному уширению резонансных линий. Установление равновесных значений населённостей зеемановских уровней системы связано с переходами между этими уровнями под влиянием спин-решёточного взаимодействия. Благодаря таким переходам, время жизни системы на каком-либо одном уровне будет ограничено, что приводит к 18 дополнительному уширению линии на величину T1 в энергетических единицах. В этом разделе мы пренебрежём всеми перечисленными выше эффектами и сосредоточим внимание на механизме уширения резонансных линий, связанном с диполь-дипольным взаимодействием между магнитными моментами различных ядер. Такое пренебрежение во многих случаях вполне допустимо. В частности, оно вполне оправдано в тех случаях, когда спины отдельных ядер равны 1 2 (в этом случае квадрупольные моменты ядер равны нулю), а время спин-решёточной релаксации достаточно велико. Вклад диполь-дипольных взаимодействий в ширину резонансных линий легко оценить по порядку величины. Если расстояние между соседними ядрами, обладающими магнитными моментами , равно r, то каждое ядро будет создавать в точке, где находится соседнее ядро, магнитное поле H LO K , по порядку величины равное H LOK r 3 . Если принять, что r = 2 Å и = 10– 23 (36) эрг/Гс (2 ядерных магнетона), то H LOK ; 1 Гс . Так как это поле может иметь различную ориентацию относительно постоянного поля H 0 , резонансные частоты отдельных ядер будут распределены в области шириной примерно 1 Гс. В этой же области будет наблюдаться резонансное поглощение энергии. Из этих рассуждений следует, что ширина резонансной линии не зависит от внешнего магнитного поля Н. Классическое выражение для энергии взаимодействия двух магнитных моментов μ j и μ k имеет следующий вид: E jk Для получения μ j μk r 3jk μ j r jk μ k r jk 3 . 3 r jk (37) квантово-механического гамильтониана взаимодействия 19 необходимо подставить в (37) вместо векторов μ j и μ k соответствующие операторы (38) μ j j I j , μk k Ik . Полный гамильтониан системы N одинаковых взаимодействующих спинов в сильном внешнем магнитном поле может быть записан в виде (39) H H Z H d, где N H Z H I z j (40) j 1 – энергия во внешнем магнитном поле, а I I I j r jk I k r jk j k Hd 3 3 r 5jk j <k r jk 2 2 (41) – энергия диполь-дипольного взаимодействия. В дальнейшем, чтобы сделать формулы менее громоздкими, там, где это не может вызвать недоразумение, опустим индексы j и k сферических координат r, , . Тогда Hd 2 2 1 1 j k I I I j I k I zj I zk 3 r 2 sin j i sin k i 3 I e I j ei I zj cos I e I k ei I zk cos 2 2 2 2 1 A B jk C jk D jk E jk F jk , r 3 jk где A jk I zj I zk 1 3cos 2 , B jk 1 1 3cos 2 4 I j I k I j I k 12 1 3cos2 I zj I zk I j Ik , 3 C jk sin cos ei I zj I k I j I zk , 2 20 (42) 3 D jk C jk sin cos ei I zj I k I j I zk , 2 (43) 3 E jk sin 2 e2i I j I k , 4 3 F jk E jk sin 2 e2 i I j I k . 4 Рассмотрим взаимодействие j-ой и k-ой частиц. Допустим, что избрано такое представление, в котором z-компонента спина каждой частицы j j диагональна. Пусть m j , mk и М – квантовые числа проекций I z , I zk и I z I zk . Нетрудно сообразить, что операторы (43) связывают состояния, различающиеся следующим образом: A : m j 0, mk 0, M 0; B : m j 1, mk 1, M 0; C : m j 0, mk 1, 1, 0, M 1; D : m j 0, mk 1, 1, 0, M 1; 0; 1; E : m j 1, mk 1, M 2; F : m j 1, mk 1, M 2. Мы видим, что матрицы А и В диагональны по М и коммутируют с матрицей зеемановской энергии (40). Поскольку диполь-дипольное взаимодействие намного слабее зеемановского, естественно попытаться выяснить, какие заключения могут быть сделаны о спектре ЯМР и форме резонансных линий на основе теории возмущений. Рассмотрим энергетический уровень 0 EM HM , соответствующий гамильтониану(40). Этот уровень сильно вырожден, т.к. существует много способов, которыми можно скомбинировать отдельные значения m j , чтобы получить величину M m1 m 2 ... m j ... mN . 21 0 Возмущение, описываемое гамильтонианом d, расщепляет уровень EM на много подуровней. Согласно первому приближению теории возмущений, вклад 0 первого порядка в расщепление уровня EM дают лишь те члены гамильтониана возмущения, которые обладают отличными от нуля матричными элементами внутри множества M , т.е. те, которые, действуя на состояние M , не вызывают изменения величины М. Обращаясь к (44), мы видим, что только операторы А и В удовлетворяют этому условию и должны быть сохранены для 0 вычисления поправок к энергии EM . Член А имеет тот же вид, что и выражение для взаимодействия двух классических диполей, и описывает взаимодействие одного диполя со статическим локальным полем, создаваемым другим диполем. Член В описывает взаимодействие, при котором возможно одновременное переворачивание двух соседних спинов в противоположных направлениях. Эта часть гамильтониана соответствует резонансному действию вращающегося локального поля. Влияние члена С заключается в примешивании к состоянию M с 0 невозмущённой энергией EM малой доли состояния M 1 . Таким образом, точное собственное состояние гамильтониана следует представить в виде M M 1 ..., где – малая величина порядка H LO K H . Под влиянием переменного магнитного поля между двумя зеемановскими 0 EM уровнями и 0 EM будут иметь место переходы с вероятностью, пропорциональной m ,..., m ; m ,..., m N 1 1 N 2 M ; m1, m2 ,..., m j ,..., mN I x M ; m1 , m2 ,..., mj ,..., mN , (45) N где I x I xj . j 1 j Из структуры матрицы I x 22 ясно, что mj m j 1, M M 1; переходы возможны только между соседними зеемановскими уровнями, что даёт одну резонансную линию на частоте 0. Этот вывод перестаёт быть справедливым, если перейти к следующему приближению теории возмущений. Действительно, с учётом операторов C, D, E и F правильные волновые функции можно представить в виде M где 1 M 1 M 1 1 M 1 2 M 2 2 M 2 , (46) i H LO K H . Теперь становятся возможными переходы M 0, 2, 3 на частотах 0, 2 0, 3 0 ; интенсивность дополнительных пиков поглощения пропорциональна 2 . Матрица А + В такова, что её структура не изменится, если у диагональных элементов изменить знак на обратный. Поэтому решение векового уравнения А + В – Е = 0 даёт для энергии возмущения Е значения, которые попарно одинаковы по модулю, но различаются по знаку. Легко сообразить, что вероятности перехода между двумя парами подуровней, отличающихся знаками энергии, также будут одинаковы. Отсюда вытекает, что форма основной линии ЯМР симметрична относительно резонансной частоты. Проведение детальных расчётов методом возмущений невозможно из-за огромного числа степеней свободы системы магнитных частиц. Поэтому широкое применение нашёл метод моментов, позволяющий учесть магнитные дипольные взаимодействия и оценить форму резонансной линии, не производя вычислений энергетического спектра. Анализ формы линий магнитного резонанса методом моментов впервые был выполнен Ван-Флеком. 1.4. Метод моментов и форма линии ЯМР Важными характеристиками формы линий являются моменты линии. Kый момент M K относительно частоты 0 определяется следующей формулой: 23 K M K 0 f d , (47) 0 где f – функция формы линии. Положим 0 u, f f 0 u f u ; тогда M K u K f u du или для узких линий 0 MK K u f u du. (48) Разложим f u в интеграл Фурье: 1 f u 2 t e iut dt , t f u e iut du. (49) Фурье-образ t функции формы линии имеет простой физический смысл. Пусть ядерный парамагнетик находится в равновесном состоянии в постоянном магнитном поле Н, так что его намагниченность направлена по полю. Если на образец наложить короткий интенсивный импульс радиочастотного поля H1 H, то под его воздействием намагниченность M повернётся на некоторый угол к полю Н. Допустим, что длительность импульса настолько мала, что можно пренебречь явлениями релаксации. Если бы резонансная линия была бесконечно узка, то после прекращения импульса намагниченность М совершала бы прецессию с частотой 0 0 2 вокруг поля под постоянным углом . Эта свободная прецессия может быть детектирована по индуцированному ею сигналу в катушке, окружающей образец. Если ширина линии конечна, то вследствие разброса прецессионных частот сигнал затухнет за время порядка обратной ширины линии. Оказывается, что Фурье-образ функции формы линии просто связан с кривой затухания свободной прецессии: функция t пропорциональна амплитуде сигнала свободной прецессии по окончании 900импульса. 24 Разложим функцию t в ряд Тейлора вблизи точки t 0 : 2 d t t 2 d t t 0 t ... dt t 0 2! dt 2 t 0 (50) Из (49) вытекает, что d K t iK M K , K dt t 0 (51) M K , то может быть и, следовательно, если известны все моменты восстановлена функция формы f . Существуют методы, позволяющие с большой точностью рассчитать моменты M K , однако с ростом К вычисления становятся настолько громоздкими, что приходится ограничиться расчётом лишь нескольких первых моментов. Поэтому для сопоставления теории с экспериментом пользуются несколькими типичными кривыми, из которых выбирают наиболее близкую к линии, полученной из опыта. Затем остаётся сравнить известные моменты типичной кривой с моментами, полученными теоретически. В качестве типичных кривых обычно пользуются следующими существенно различными функциями: гауссовой и лоренцевой. У гауссовой линии fG u 1 exp u 2 2 2 2 (52) вершина более полога, а крылья спадают быстрее, чем у лоренцевой: fL u 1 2 . 2 u 2 4 (53) Ширина линии, определяемая равенством f 2 1 f 0 , 2 (54) для гауссовой формы равна G 2 2ln 2 2,35 , 25 а для лоренцевой: L . Для гауссовой линии чётные моменты равны M 2 2 , M 4 3 4 ,..., M 2n 1 3 5 2n 1 2n . (55) Для лоренцевой линии интегралы (48) при К 1 расходятся. Поэтому лоренцеву линию обрезают на частотах 0 , где /2. Тогда M2 3 2n1 , M4 ,..., M 2n . 3 2n 1 (56) Гауссова и лоренцева линии симметричны относительно 0 ; поэтому нечётные моменты равны нулю. Для того чтобы выяснить, насколько близка та или иная функция формы к гауссовой или лоренцевой линии, часто ограничиваются вычислениями отношения M 4 M 22 . Для гауссовой линии M 4 M 22 3, (57) M 4 M 22 3 1, (58) для лоренцевой линии для линии прямоугольной формы M 4 M 22 1. 1.5. Вычисление моментов Вернёмся к ширине и форме линии, уширенной благодаря дипольдипольному взаимодействию. Наиболее простым, представляющим интерес, является второй момент дипольно уширенной линии, который в соответствии с (47) может быть определён как 2 M 2 0 . Из-за симметрии линии средняя частота (59) равна резонансной частоте 0 , и поэтому M 2 2 02 . 26 (60) Пусть собственные значения гамильтониана (39) суть En . Так как переход между уровнями n и n характеризуется частотой E E n nn nn n nnn h 2 и интенсивностью, пропорциональной n I x n 2 2 nn n, n n, n , то 2 n I x n (61) . 2 n I x n Легко показать, что эта формула может быть преобразована к виду 2 2 Sp H I x h 2 SpI x2 (62) . Действительно, 2 Sp H I x I x H n, n n H I x I x H n n H I x I x H n . Так как след (шпур) матрицы инвариантен в отношении преобразования подобия, мы можем предположить, что матрица диагональна, и тогда n H I x I x H n h nn n I x n , n H I x I x H n h nn n I x n и, следовательно, 2 2 2 Sp H I x I x H h 2 nn n Ix n . n, n Знаменатель формулы (62) преобразуется следующим образом: SpI x2 n, n n I x n n I x n n, n 2 n I x n . Справедливость формулы (62) доказана. Эта формула, в отличие от (61), очень удобна для расчётов, ибо следы матриц могут быть легко вычислены, в то время как нахождение собственных значений матриц при большом N связано с огромными трудностями. 27 Очень важно иметь в виду следующее. В формуле (62) учитывается поглощение на всех частотах от 0 до . Выше указывалось, что помимо главной резонансной линии на частоте 0 существуют дополнительные пики поглощения на частотах 0, 2 0 , 3 0 ; хотя эти пики слабы (они находятся далеко от центра основной линии), их вклад в моменты высокого порядка очень велик. Поэтому, поскольку нас интересует только главная резонансная линия, в формуле (62) гамильтониан H H Z H d необходимо заменить “усечённым” гамильтонианом H Z H 0d , отбросив в операторе диполь-дипольного взаимодействия H d ту его часть, которая не коммутирует с H Z и поэтому приводит к появлению дополнительных резонансных пиков поглощения. Из (44) вытекает, что 22 3 22 1 H d 3 A jk B jk 3 1 3cos 2 jk I zj I zk I j I k . 3 j k r j k 2 r jk 0 (63) Детальные расчёты моментов сводятся к вычислениям следов из произведений спиновых матриц n nm j n1 k 2 I I Il , где , , x, y, z; j k ... l. Полезно иметь в виду, что nm n1 k n 2 Sp Ij I ... Il 0, (64) если хотя бы одна из степеней n i является нечётным числом. Воспользовавшись (64), нетрудно показать, что в (62) исчезают перекрёстные члены, содержащие произведения H Z H 0d , так что (62) переходит в следующую формулу: 2 2 Sp H Z , I x Sp H 0d , I x h 2 SpI x2 2 . (65) Если бы не было диполь-дипольных взаимодействий и H 0d 0, то, очевидно, 28 2 02 . Из (60) и (65) получаем окончательно M2 Sp H 0d , I x h 2 SpI x2 2 (66) . Аналогично, для четвёртого момента имеем 2 Sp H 0d , H d0 , I x M4 . 4 2 h SpI x (67) Вычисления (66) с гамильтонианом (63) дают следующее выражение для второго момента (формула Ван-Флека): M2 3 4 2 I I 1 16 2 k 1 3cos 2 jk 2 [Гц2]. 6 r jk (68) Для порошка, содержащего кристаллы с хаотическими ориентациями, это выражение упрощается благодаря исчезновению Усредняя по сфере, получаем 1 3cos 2 3 M 2 42 I I 1 4 k M2 2 угловой зависимости. 4 5 и, следовательно, 1 3cos 2 jk 2 6 r jk [(радс) 2], 3 4 2 6 2 I I 1 r jk . 20 k (69) Для простой кубической решётки с постоянной a0 имеем r jk6 8,5 a06 k и 42 M 2 5,1 2 I I 1 a 06. 4 (70) В случае монокристалла с простой кубической решёткой 4 2 M 2 12,3 2 I I 1 a 06 14 24 34 0,187 [Гц2], 4 (71) 29 где 1, 2, 3 – направляющие косинусы внешнего поля относительно осей кристалла; a0 a 2, где a – постоянная решётки. Заметим, что с учётом в гамильтониане диполь-дипольного взаимодействия только статической части 3 2 2 A jk r jk j k 2 второй момент M 2 получается в 9 4 3 2 раз меньше. Если же, наоборот, мы включим в рассмотрение все операторы от A до F (см. (43)), то получим сильно завышенное значение. Простой расчёт показывает, что для порошка замена H 0d на полный гамильтониан H d приводит к увеличению M 2 в 10 3 раз. Зная M2, только нельзя сделать выводы относительно формы резонансной линии. Поэтому, используя выражение (67), целесообразно вычислить ещё, по крайней мере, четвёртый момент. Результат этого громоздкого вычисления можно представить в виде: 2 1 2 M4 3 b b 2jk b jl bkl 4 jk 2 3 N jkl k 1 8 4 1 3 b 4jk 8 5 k 2 I I 1 2 2 I I 1 , 3 (72) где 2 3 1 3cos jk b jk , 2 r 3jk а символ означает, что в тройном суммировании не должно быть двух jk l одинаковых индексов. Численная оценка (72) затруднительна даже для простой кубической решётки, если направление магнитного поля относительно кристаллографических осей произвольно. Если сохранить в фигурных скобках 2 только первый член, то M 4 3 M 2 , что отвечает гауссовой форме линии. 30 2. Стационарные методы детектирования сигналов ЯМР Экспериментальные аспекты ЯМР детально изложены в монографии [3]. Мы остановимся здесь только на принципах и возможностях различных методов детектирования ЯМР. В большинстве методов детектирование сигналов ЯМР основано на регистрации изменений характеристик LC -контура, в катушку индуктивности которого помещён исследуемый образец. Омические потери в катушке параллельного контура L 0C0 (рис. 3) L0 C0 можно учесть, вводя последовательно включённое сопротивление rL . Эти потери на rL частоте характеризуются тангенсом угла потерь tg L и добротностью Q : Рис.3 tg L rL 1 ; L0 Q для хороших катушек Q 100. Последовательно включённое сопротивление rL эквивалентно параллельно включённому сопротивлению RL , связанному с rL соотношением RL L0 Q. L0 rL Потери в конденсаторе также можно учесть с помощью параллельно включённого сопротивления R C . Однако в ЯМР экспериментах обычно используются такие контуры, добротность конденсаторов которых значительно выше добротности катушек; поэтому потерями в конденсаторах можно пренебречь (RC ). Если в катушку поместить образец, то её индуктивность становится равной 31 L L 01 4 , где 1 – коэффициент заполнения катушки, определяемый как отношение объёма образца к действующему объёму катушки, и i – комплексная ядерная магнитная предыдущей главе, восприимчивость, претерпевает которая, большие как было изменения показано в в окрестности резонансной частоты 0. 2.1. Метод Q -метра Структурная схема установки приведена на рис.4. Проводимость параллельного контура равна G 1 1 i C0 . R L 01 4 1 Поскольку 4 1, при резонансе C 0 имеем: L 0 G Изменение проводимости 1 4 i . R L0 при магнитном резонансе вызывает максимальное изменение напряжения высокой частоты на контуре в том случае, когда полный ток контура не меняется по величине. Это условие выполняется, если генератор ВЧ имеет высокое внутреннее сопротивление, или если связь генератора с контуром осуществляется через импеданс ZG , который очень велик по сравнению с импедансом параллельного контура, т.е. –1 ZGG (роль ZG могут играть, например, большое омическое сопротивление или конденсатор малой ёмкости). Падение напряжения ВЧ на контуре равно U IG 1 I R 32 1 1 IR 1 i 4 R L 0 1 i 4 Q и в отсутствие сигнала ЯМР 0 U 0 IR. Поскольку 4Q 1, мы можем записать U U 0 1 i 4 Q U 0 U , Zr Генератор C0 Усилитель Амплитудный ВЧ детектор ВЧ Образец L0 N S Селективный усилитель ЗГ Синхронный (модуляция) детектор Стабилизирован. Двухкоординатный источник тока X самописец Y Блок развёртки магнитного поля Рис.4 где U iU 0 4 Q i U iU ; в результате изменение напряжения на контуре при резонансе U U U 0 U U 0 4 Q 33 оказывается пропорциональным мнимой части комплексной восприимчивости, т.е. поглощению. В методе Q -метра сигнал ЯМР появляется в виде очень малой модуляции напряжения U 0 , существующего и в отсутствие сигнала. Усиление величины U до значения K U , достаточного для детектирования, приводит к очень большим значениям K U 0 ; это обстоятельство ограничивает коэффициент усиления по высокой частоте. 2.2. Мостовой детектор В мостовом методе детектирования напряжение на контуре U 0 компенсируют, складывая с ним перед усилением напряжение U1, почти равное ему по амплитуде и почти противоположное по фазе. В этом случае усиливаемое и детектируемое напряжение равно V U 0 U1 iU 0 4 Q. Для стабильной работы устройства (структурная схема ВЧ части изображена на рис.5) желательно избегать полной компенсации и сохранять условие U0 – U1U. Разности U 0 U1 можно придать любую фазу относительно U 0 . Записывая U 0 U1 U 0 exp i , где – вещественная величина, находим: Генератор ВЧ Аттенюатор Фазовращатель Сумматор Усилитель ВЧ Р и с.5 34 4 Q V U 0 exp i 1 i exp i 4 Q 4 Q U 0 exp i 1 sin cos i cos sin . В силу малости величины 4 Q в фигурных скобках существенны только первые два члена. При 0 амплитуда V в первом приближении зависит только от (сигнал поглощения), а при – только от (сигнал 2 дисперсии). При промежуточных значениях напряжение, поступающее с выхода моста на усилитель высокой частоты, содержит смесь сигналов поглощения и дисперсии. 2.3. Метод скрещенных катушек (Блоха) По конструкции и действию эта система аналогична мостовой, в которой, однако, функции создания и регистрации высокочастотного поля выполняются различными катушками. Поле, создаваемое передающей катушкой, выравнивает фазы отдельных прецессирующих ядерных моментов; приёмная катушка служит для измерения переменного магнитного потока, возникающего в результате прецессии суммарного вектора намагниченности. Если ось передающей катушки совпадает с осью x лабораторной системы координат, то напряжение U , индуцированное прецессирующей намагниченностью в приёмной катушке, будет пропорционально dM y dt . Поскольку M y Im H1 exp i t (см. (30)), то dM y dt H1 d sin t cos t H1 cos t sin t . dt Амплитуда этого напряжения пропорциональна 2 2 12 . Если поля катушек не строго перпендикулярны, то передающая катушка наводит в приёмной напряжение 35 V складывающееся с U . d H cos t sin t , dt 1 Если VU, то изменение амплитуды напряжения на приёмной катушке при резонансе равно V U V . Таким образом, существование потока утечки при использовании скрещенных 12 2 2 катушек позволяет наблюдать не а , – чистый сигнал поглощения. Как следует из последней формулы, изменение амплитуды напряжения при резонансе имеет знак, который определяется знаком H или знаком гиромагнитного отношения ; благодаря этому появляется возможность найти относительные знаки двух ядерных моментов I и I , сравнивая их сигналы на одной частоте, но в разных магнитных полях. 2.4. Автодинный детектор (генератор слабых колебаний) Принцип работы автодинного детектора заключается в следующем. Образец с ядерными спинами помещается в катушку LC -контура радиочастотного генератора. Возникающее в области резонанса изменение магнитной восприимчивости вызывает частотную и амплитудную модуляцию генерируемых высокочастотных колебаний. В зависимости от того, реагирует ли последующий приёмник на частотные или амплитудные изменения, после детектирования получается сигнал дисперсии или поглощения. На практике автодинные детекторы используют, как правило, для регистрации сигналов поглощения. Известно, что параллельный резонансный контур можно возбудить, подключив параллельно ему отрицательную проводимость, т.е. двухполюсник с вольт-амперной характеристикой типа i G1u G2 u 2 G3 u 3 ... 36 Колебания в контуре возникают только в том случае, если проводимость G1 в рабочей точке отрицательна (“падающая” вольтамперная характеристика). Рабочей точкой мы называем точку пересечения характеристики с осью u 0. Без потери общности можно считать рабочей точкой точку перегиба кривой i i u , т.е. положить G2 0. проводимостью G Стационарные колебания в контуре с будут устанавливаться при условии G1 G G1 0. Амплитуду возникающих колебаний можно найти графически, определив из условия di du0 экстремумы результирующей вольт-амперной характеристики i G1 u G3 u 3. Положение этих точек определяется выражением u1 G1 , 3G3 откуда амплитуда колебаний V0 2 u 1 4G1 . 3G3 Чувствительность Е автодинного детектора характеризуется изменением напряжения на колебательном контуре при изменении его проводимости: E dV0 dV0 2 1 . dG dG1 3G3 V0 Таким образом, чувствительность возрастает при уменьшении амплитуды колебаний. Преимуществами автодинных детекторов являются их простота и лёгкость перестройки в широком диапазоне частот. Основной их недостаток – трудность получения очень слабых радиочастотных полей H1 , которые необходимы иногда для того, чтобы избежать эффекта насыщения сигналов ЯМР в образцах с длинными временами релаксации. 37 2.5. Двойная модуляция Сильные сигналы ЯМР (например, от протонов воды) можно наблюдать на экране осциллографа, используя одну низкочастотную модуляцию магнитного поля. Такая схема наблюдения реализована, например, в измерителях магнитной индукции Ш1–1 и Ш1–9. Мощность шумов в этой схеме, пропорциональная ширине полосы пропускания F усилителя низкой частоты, весьма высока. Например, для наблюдения неискажённых линий ЯМР при частоте модуляции 50 Гц ширина полосы пропускания УНЧ должна быть выбрана порядка 103 Гц. Для наблюдения слабых сигналов необходимо уменьшить мощность шумов, т.е. сократить полосу пропускания УНЧ; в случае очень слабых сигналов ширина полосы пропускания должна быть меньше 0,1 Гц. Создать низкочастотные усилители с такой узкой полосой пропускания и стабилизировать частоту модуляции в пределах малой части этой полосы очень трудно. Поэтому поступают следующим образом. Наряду с медленным изменением магнитного поля по линейному закону (модуляция 1) осуществляют быструю и неглубокую (значительно меньше ширины линии ЯМР) модуляцию с частотой (модуляция 2). Результирующее изменение магнитного поля H at H M sin t ( a const , H M H 2 – глубина модуляции) приводит к тому, что сигнал ЯМР переносится на фиксированную частоту , причём амплитуда его оказывается пропорциональной производной поглощения d dH , а фазы колебаний частоты на разных склонах кривой H отличаются на 1800 (рис.6). Последующее усиление сигнала ЯМР производится специальным селективным усилителем, настроенным на частоту модуляции и имеющим полосу пропускания F 2 порядка нескольких Гц. Селективный усилитель обычно строится по типу усилителя с отрицательной обратной связью через режекторный фильтр. В качестве последнего чаще всего 38 ΔH 1 2 0 H 1 2 H t UFL H, t Рис.6 используется двойной Т-образный RC-фильтр (рис.7), который пропускает через себя все частоты, кроме измеряемой (в нашем случае кроме частоты модуляции ). Вследствие этого отрицательная обратная связь действует на всех частотах кроме , и в целом устройство работает как резонансный усилитель. Благодаря узкой полосе пропускания этого усилителя мощность 39 R R C C a) R 2 2C KU b) 1 RC частота Рис.7. Схема (а) и частотная характеристика (b) двойного Т-образного RC-фильтра шумов на его выходе существенно уменьшается, а это приводит, в свою очередь, к эффективному увеличению отношения сигналшум. Дальнейшее увеличение отношения сигналшум получают с помощью синхронного детектирования, которое оказывается возможным благодаря тому, что полезный сигнал имеет узкий спектр частот вблизи фиксированной частоты . 2.6. Синхронный детектор В синхронном детекторе выходное напряжение селективного усилителя u t u 0 sin t e t , представляющее собой смесь полезного сигнала и шума e t , умножается на 40 периодическую функцию F t с периодом 2 (опорное напряжение) и затем интегрируется по времени 2 /; здесь – ширина частотного спектра сигнала u t , ограниченная шириной полосы пропускания селективного усилителя. Положим F t sin t. Тогда на выходе синхронного детектора имеем 0 u t sin t dt U E u0 2 sin 2 t 1 E . 2 t Поскольку 1, то полезный сигнал равен u 0 2. Второй член, обязанный шумам, – случайная величина; поэтому можно говорить только о среднеквадратичном значении E 2 . Расчёт приводит к выражению E 2 J , 2 где J – спектральная плотность мощности шумов на частоте . Это означает, что шумы проходят через синхронный детектор как через фильтр с эквивалентной полосой пропускания 2 . Отношение сигнал шум на выходе синхронного детектора 12 U E 2 12 u0 2J оказывается пропорциональным 1 2 и, следовательно, может быть сделано большим за счёт увеличения времени интегрирования. На рис.8 изображена схема простейшего синхронного детектора на полевом транзисторе с двумя изолированными затворами. Время интегрирования в данной схеме определяется постоянной времени цепи 2 RC; увеличивая R и С, можно добиться эквивалентной полосы пропускания синхронного детектора порядка долей герца. Синхронный детектор называют также фазовым детектором, ибо напряжение 41 +UC RC R выход вход F(t) C вход u(t) ПТ Рис. 8 на его выходе зависит от соотношения фаз сигнала и опорного напряжения. Действительно, если опорное напряжение сдвинуто по фазе относительно сигнала на угол , то на выходе синхронного детектора имеем U , u0 sin t sin t dt 0 u0 2 sin 2 cos 1 2 cos 2 sin 2 или, поскольку 1, U , u0 cos . 2 Самым простым способом умножения входного сигнала u t на опорное напряжение F t является применение переключателя (например, диодного). Тогда опорное напряжение можно представить в виде F t 1, T 2 t 0, 1, 0 < t < T 2, T 2 . Разложение в ряд Фурье такой функции имеет вид F t 42 4 sin 2n 1 t 2n 1 . n 0 Если , то в спектре шумов на входе синхронного детектора нет составляющих с частотами 3, 5 и т.д., поэтому слагаемые F(t) с n 0 не дают вклада в результирующий сигнал. 3. Описание экспериментальной установки 3.1. Назначение спектрометра и его технические характеристики В данной работе используется стационарный спектрометр широких линий автодинного типа, предназначенный для регистрации спектров ЯМР в твёрдом теле. Выбор ядер для наблюдения резонанса определяется источником магнитного поля спектрометра ограничивается изотопами 19 (постоянный магнит) и практически F и 1H . Регистрация сигналов и последующая обработка спектров производится с помощью микроконтроллера и компьютера. Технические характеристики спектрометра таковы: Рабочие частоты автодинного генератора………………….5…40 МГц Магнитное поле………………………………………………2500 Э Частота модуляции…………………………………………..373 Гц Максимальная амплитуда модуляции магнитного поля……………………………………………..50 Э Диапазон протяжки магнитного поля………………………100 Э Амплитуда напряжения на катушке с образцом…………..50…500 мВ Коэффициент усиления по высокой частоте………………30 дБ Коэффициент усиления НЧ-тракта…………………………100 дБ 3.2. Структурная схема установки и принцип работы Структурная схема спектрометра изображена на рис.9. Катушка индуктивности с образцом находится в зазоре постоянного магнита. Для медленного изменения магнитного поля используются катушки 43 Селективный Синхронный усилитель детектор Частотомер Генератор звуковой частоты Автодинный детектор Образец L0 N Микроконтроллер S ЦАП Усилитель тока АЦП Компьютер подмагничивания Рис.9. Структурная схема спектрометра подмагничивания, изображённые на структурной схеме жирными линиями. Модуляционные катушки расположены в непосредственной близости образца. Автодинный детектор включает в себя диодный амплитудный детектор, выделяющий огибающую высокочастотных колебаний генератора, которая подаётся на вход селективного усилителя системы регистрации, усиливающего напряжение частотой 373 Гц. Усиленное низкочастотное напряжение поступает на вход синхронного детектора. В качестве опорного напряжения синхронного детектора используется выходное напряжение звукового генератора, которое одновременно подаётся на модуляционные катушки. Выход системы регистрации соединён с входом аналого-цифрового преобразователя (АЦП) микроконтроллера ATMEGA 8535. Медленная протяжка магнитного поля осуществляется этим же микроконтроллером с 44 помощью цифро-аналогового преобразователя (ЦАП). Таким образом, для каждой измеряемой точки спектра ЯМР микроконтроллер устанавливает напряжённость магнитного поля и измеряет величину производной сигнала поглощения. После чего эти данные пересылаются в компьютер и отображаются на его экране в виде спектра ЯМР. Автодинный детектор собран по модифицированной схеме Паунда-Найта на двух полевых транзисторах КТ312 (см. рис.10). Схема представляет собой, по существу, дифференциальный каскад и обладает отрицательным наклоном +15V 50H 1n0 10 2k КП312А КП312Б 10n 1p5 L M10 С 2…15 p 1k5 k91 10n 10k 10 KП312А КТ399А –15V К частотомеру и измерителю уровня генерации +15V 2p2 k43 22n 4M7 k10 n10 Д18 К селективному усилителю 1k0 Д18 2n0 10k –15V Рис.10. Принципиальная схема автодинного генератора 45 вольт-амперной характеристики. Колебательный контур соединён с затвором первого транзистора (слева) через RC-цепочку, представляющую собой фильтр верхних частот, препятствующий проникновению в генератор низкочастотного напряжения, наводящегося на катушке из-за модуляции магнитного поля. Режим генерации регулируется с помощью переменного резистора, включённого в цепь истока второго транзистора. Ток, восполняющий потери в контуре, подаётся с его стока на контур через ёмкость. Согласование высокого сопротивления колебательного контура с сопротивлением нагрузок генератора осуществляется составным повторителем (на полевом транзисторе КП312А и биполярном – КТ 399А). Далее сигнал подаётся на амплитудный детектор с целью последующего синхронного детектирования, на частотомер для измерения частоты, а также на милливольтметр – индикатор уровня генерации. После амплитудного детектирования сигнал подаётся на устройство регистрации (см. рис.11). Усиленный селективным усилителем, обладающим С выхода автодинного детектора Селективный усилитель 1 Фазовращатель и аттенюатор Схема компенсации Аттенюатор Фазовращатель Селективный усилитель 2 Усилитель постоян. тока Синхронный детектор С выхода ГЗЧ К АЦП микроконтроллера Рис.11. Структурная схема устройства регистрации максимальным усилением на частоте модуляции (373 Гц), он поступает на схему компенсации паразитного сигнала, неизбежно наводящегося на катушке с образцом за счёт модуляции магнитного поля. Фаза и амплитуда компенсирующего напряжения выбираются такими, чтобы в отсутствие 46 сигнала ЯМР на выходе схемы отсутствовало напряжение с частотой 373 Гц. Контроль компенсации производится по фигурам Лиссажу на экране осциллографа, на вход X которого подаётся опорное напряжение со звукового генератора, а на вход Y – выходной сигнал схемы компенсации. Затем следует основной селективный усилитель. Синхронный детектор перемножает усиленное напряжение с опорным с последующим интегрированием. Фаза опорного напряжения настраивается так, чтобы получить максимальный сигнал. Оконечный каскад схемы регистрации представляет собой усилитель постоянного тока, с выходом которого соединён вход АЦП микроконтроллера. Принцип автодинного детектирования, двойной модуляции и синхронного детектирования подробно описан в разделах 2.4, 2.5 и 2.6. 4. Запись и обработка спектров ЯМР Запись и обработка спектров ЯМР производится на компьютере с помощью соответствующих программ. 4.1. Программа регистрации спектров ЯМР Окно программы регистрации спектров ЯМР показано на рис.12. Окно содержит следующие элементы: 1. Окно графической информации; 2. “Start”– кнопка запуска развёртки магнитного поля; 3. “Stop”– кнопка остановки развёртки магнитного поля; 4. “Save”– кнопка сохранения измеренного спектра; 5. “Freq”– окно для введения частоты генератора ЯМР; 6. “Quick”– кнопка переключения между быстрой (для предварительных измерений) и медленной развёртками магнитного поля; 7. “Pause”– кнопка временной остановки развёртки поля; 8. “X”– текущее значение магнитного поля в ед. ЦАП; 9. Y”– текущее значение производной сигнала ЯМР; 47 10. Dev”– окно, где указывается величина площади производной сигнала ЯМР (при настроенном спектрометре это значение должно быть близким к нулю). NMR_reg Start Quick Stop Pause Save X Y Freq KHz Dev Рис.12. Окно программы регистрации спектров ЯМР Порядок работы с программой. 1. Настроить выход усилителя постоянного тока (в устройстве регистрации) на нулевое смещение: а) запустить развёртку магнитного поля и сразу же остановить её кнопкой “Pause”; б) вращая регулятор смещения усилителя постоянного тока добиться близкого к нулю значения в окне “Y”; в) запустить развёртку поля кнопкой “Pause” и сразу же прервать запись. 2. Запустить развёртку магнитного поля. В момент прохождения поля через резонанс ввести в окно “Freq” измеренное частотомером значение частоты ЯМР. 3. Остановить запись и сохранить записанный спектр в папке [spectra]. 48 4.2. Программа расчёта значений магнитного поля Связать значение напряжения на выходе ЦАП микроконтроллера и значение напряжённости магнитного поля в зазоре магнита очень сложно, так как на напряжённость магнитного поля влияют многие параметры (например, температура магнита). Поэтому для определения значения напряжённости магнитного поля пользуются возможностью записывать спектры ЯМР на двух несколько отличающихся частотах. Допустим, мы записали спектры ЯМР на частотах f1 и f2. После записи у этих двух спектров можно определить положения линий ЯМР, соответствующие двум значениям напряжённости магнитного поля n1 и n2, которые приведены в некоторых единицах (процентах от величины развёртки), пока не связанных с единицами значения напряжённости поля. С другой стороны, зная гиромагнитное отношение , можно определить значения магнитных полей Н1 и Н2, соответствующие центрам двух спектров ЯМР, записанных на разных частотах: H i fi / . Теперь мы можем сопоставить Н1 и Н2 к п1 и п2 и в приближении линейной развёртки магнитного поля вычислить значение напряжённости магнитного поля Н для каждой точки спектра ЯМР со значением п: H H1 H 2 H1 n n1 . n2 n1 Эти вычисления выполняет программа расчёта значений магнитного поля, её окно показано на рис.13. Порядок работы с программой. 1. Ввести, если необходимо, значение гиромагнитного отношения для ядер соответствующего иона в окно “gamma”. 2. Открыть кнопкой “Open” основной файл с данными спектра ЯМР, 49 измеренного на частоте f1. Спектр появится в левой части графического окна. Если необходимо, ввести частоту ЯМР в окно “f1”. 3. Открыть кнопкой “OpenFreq” файл с данными спектра ЯМР, измеренного на частоте f2. Спектр появится в правой части графического окна. Если необходимо, ввести частоту ЯМР в окно “f2”. 4. Установить компьютерной мышкой красные пунктирные линии на центры линий ЯМР и нажать кнопку “Calculate H”. Ось абсцисс основного спектра (левое окно) будет пересчитана в значения напряжённости магнитного NMR_CaF2 Open R+ f1 OpenFre R+ 0 KHz gamma 40. 05 MHz/T f2 0 KH gauss/unit Calculate 0 H Откройте файл с данными для H C3 кнопкой Open и введите частоту ЯМР Рис.13. Окно программы расчёта значений магнитного поля поля, а сам спектр сохранён в тот же файл с новыми значениями оси абсцисс. Пусть кроме упоминавшихся были произведены записи спектров ЯМР и при других условиях (например, в другой ориентации магнитного поля относительно осей кристалла) на той же частоте f1. Тогда, открыв соответствующий файл, в левой части графического окна получим спектр, ось абсцисс которого будет автоматически пересчитана в единицы напряжённости магнитного поля, а сам спектр автоматически сохранён с новыми значениями оси абсцисс. 50 4.3. Программа выделения части спектра с линией ЯМР и вычисления ширины линии Участки спектра, располагающиеся вдали от центра линии ЯМР, не содержат никакой информации о форме линии. Однако эти участки, как и весь спектр, содержат шумы, которые при вычислении второго и четвёртого моментов линий увеличивают ошибку определения значений моментов. Поэтому для повышения точности измерения значений моментов необходимо использовать только центральную часть спектра, содержащую линию ЯМР, а боковые части спектра, содержащие только шум, необходимо удалить. Для этого используется программа выделения части спектра с линией ЯМР и вычисления ширины линии (см. рис.14). NMR_cut R+ N Open Save ширина линии гаусс Cut Установите зелёную линию на центр линии ЯМР, а красные линии на экстремумы линии ЯМР; после чего нажмите кнопку “Cut”. Спектр будет обрезан по синим линиям. Сохраните полученный спектр. Подгоните красные линии к экстремумам и запишите значение ширины линии. Рис.14. Окно программы выделения части спектра с линией ЯМР поглощения и вычисления ширины линии 51 Порядок работы с программой. 1. Открыть обрабатываемый спектр и установить зелёную линию на центр линии производной ЯМР. 2. Установить красные линии на экстремумы линии производной ЯМР. Синие линии одновременно переместятся и покажут выделяемый участок спектра. 3. Обрезать ненужные участки спектра с помощью кнопки “Cut”. 4. Сохранить полученный спектр (кнопка “Save”). 5. Повторно установить красные линии на экстремумы и записать значение пиковой ширины линии ЯМР. Задание 1. Ознакомиться с основами теории ЯМР в твёрдых телах и методами детектирования сигналов ЯМР (разделы 1 и 2). 2. Изучить структурную и принципиальную электрическую схемы ЯМР-спектрометра (раздел 3). 3. Произвести запись линий ЯМР 19 F в кристалле CaF2 при ориентациях постоянного магнитного поля вдоль кристаллографических направлений [100], [110] и [111] (в других обозначениях, соответственно: С4, С2 и С3). 4. Вычислить вторые и четвёртые моменты экспериментальных кривых; сравнить полученные моменты с теоретическими значениями (см. формулы (68), (71) и Приложение); вычислить отношения M 4 /M22. Приложения П1. Сведения о кристалле CaF2 Фторид кальция CaF2 принадлежит пространственной группе Oh5 и имеет постоянную решётки a=5,46Å. Структуру его можно рассматривать как простую последовательность кубов, образованных ионами F с ионами Ca2+, 52 находящимися в центре каждого второго куба. Кристалл содержит только один сорт ядер 19 F с отличными от нуля спинами. Квадрупольные эффекты отсутствуют, т.к. спин ядра моменты 19 F равен 1/2. Ядра имеют большие магнитные 2,63 N , / 2 4007 Гц/Э и образуют простую кубическую решётку. Ниже приведены теоретические значения корня четвёртой степени из четвёртого момента (в эрстедах) для различных направлений магнитного поля относительно кристаллографических осей. Направление Н [100] [110] [111] 4M 4,31 2,73 1,88 4 П2. Вычисление моментов экспериментальных кривых Процедура d f H dH вычисления по моментов существу сводится экспериментальных к двойному кривых численному интегрированию и поясняется нижеприведёнными формулами и рисунком 14. Полагая H h , имеем: N N n Am1 Am n m Am1 Am 2 m1 M n 0 m1 N N Am1 Am Am1 Am f h dh 2 m 1 m1 0 n n A 0 A1 1 A1 A 2 2 ... Am1 Am mn ... AN 1 N n n n h f h dh m A 0 2 A1 A 2 ... AN 1 . AN 0; AN 1 aN 1 ; AN 2 AN 1 aN 2 ; AN 3 AN 2 aN 3 ; ...; A1 A 2 a1 ; A 0 A1 a 0 . 53 Для корректной аппроксимации кривой поглощения интервал должен быть выбран достаточно малым: величина N должна быть порядка 15…30. aN–3 aN–2 aN–1 a2 a1 Производная a0 h А0 А1 А2 Первообразная AN –2 AN –1 AN =0 h N . . . . . . . . . . . . 210 Рис.15 54