Для расширения диапазона регулирования скорости движения
реклама

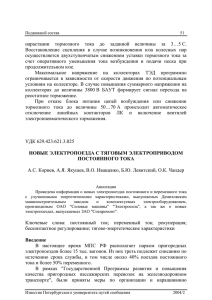
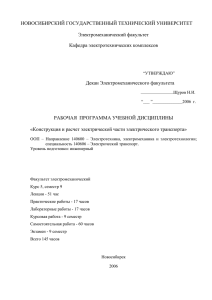
Подвижной состав 55 Для расширения диапазона регулирования скорости движения предусмотрено плавное ослабление возбуждения ТЭД в тяговых и тормозных режимах посредством импульсного шунтирования обмоток возбуждения универсальным силовым транзисторным ключом. Переключение силовых цепей в режим ослабления возбуждения осуществляется с помощью двух индивидуальных силовых контакторов. Переход из режима тяги в режим электрического реостатного торможения производится путем реверсирования обмоток якорей ТЭД тормозным двухпозиционным переключателем. Для обеспечения автоматического пуска и электрического торможения со стабилизацией токов тяговых электродвигателей запланировано применением микропроцессорной системы управления. 5. Заключение В заключение можно констатировать, что реализация этих проектов и опытная эксплуатация новых электропоездов дали важные научно практические результаты, которые позволяют приступить к серийному выпуску пригородных электропоездов нового поколения. УДК 629.423.31:621.314.2.6883 ПОЛУПРОВОДНИКОВЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОПОЕЗДОВ А.С. Мазнев, А.М. Евстафьев, О.И. Шатнев Аннотация Рассмотрены особенности режимов тяги и реостатного торможения тяговых двигателей электрического подвижного состава с тиристорными преобразователями. Ключевые слова: электроподвижной состав; ослабление возбуждения тяговых двигателей; тиристорный шунт; эксплуатационные характеристики Введение В соответствии с комплексной программой «Создания и освоения производства новых локомотивов в 2004-2010 годах» предполагается освоение капитального ремонта подвижного состава с продлением срока полезного использования. Известия Петербургского университета путей сообщения 2004/2 Подвижной состав 56 Кафедрой «Электрическая тяга» Петербургского государственного университета путей сообщения (ПГУПС) совместно с ОАО «Экспериментальный завод» были разработаны безындуктивные шунты для замены штатных шунтов ИШ-104 при капитальных ремонтах электропоездов ЭР2. В настоящее время предложены схемы безындуктивных шунтов для электропоездов серий ЭР2, ЭР2Т, электровозов серии ВЛ10 с использованием меньшего количества комплектующих изделий, обеспечивающие возможность электрического торможения и снижение потребления электроэнергии. 1.Импульсное регулирование возбуждения Тиристорный шунт отключает цепи ослабления возбуждения тягового электродвигателя (ТД) при колебаниях напряжения в контактной сети, восстановлении напряжения после отрыва токоприемника, восстановлении сцепления колес с рельсами после разносного боксования, коротких замыканий цепи ТД на «землю», действуя при этом аналогично индуктивному шунту. Анализ вариантов систем ослабления возбуждения показывает, что для моторного режима целесообразно применять безындуктивный тиристорный шунт, который позволяет улучшить технико-экономические показатели системы регулирования скорости, для режима реостатного торможения – импульсный преобразователь, с помощью которого изменяется коэффициент ослабления возбуждения IВ IЯ f( ) (1) где I В , I Я , – средние значения токов возбуждения, якоря и коэффициент заполнения. Принципиальная схема торможения приведена на рис.1. Для интервала включенного прерывателя (режим 1): diB1 R B i B1 R Ш i Ш 1 0 dt di L Я Я 1 R Я i Я 1 RT iT 1 e1 dt RШ i Ш1 RT iT 1 0 i Я1 i В1 i Ш1 iT 1 LВ (2) (3) (4) (5) Для интервала выключенного состояния прерывателя (режим 2): 2004/2 Известия Петербургского университета путей сообщения Подвижной состав 57 LЯ di Я 2 dt (RЯ RT )i Я 2 diB 2 dt LB RB i B 2 e2 (6) 0 (7) а) iT Rт ИР Я iЯ ОВ iш iВ iVS Rш VD iVD б) i T1 Rт е1 iЯ1 L Я Rя Lв iВ1 Rв Rш iш1 UVD в) Rт е2 iЯ2 L Я Rя Lв iВ2 Rв Rш UVS Рис.1. Схемы реостатного торможения. Из уравнений (2),(4) и (5) получаем: LB diB1 dt ( RB RЭ )i B1 RЭ R Ш RT R Ш RT RЭ i Я 1 0 (8) (9) Из уравнений (3),(4) и (5): LЯ diЯ 1 dt (RЯ RЭ )i Я 1 RЭ i Я 1 Известия Петербургского университета путей сообщения e1 (10) 2004/2 Подвижной состав 58 Принимая длительности интервалов 1 и 2 в пределах периода Т )Т интегрируем выражения (6) и (8): равными Т и (1 R B (1 )T 1 (1 )Т u L dt i B 2 dt 0 Т 0 T 0 R B RЭ T RЭ T 1 Т u L dt i B1 dt i Я 1 dt Т 0 T T 0 0 (11) B2 B1 0 (12) Средние значения токов и напряжений за интервалы 1 и 2: T i B1 dt (13) 0 I B1 T (1 )T i B 2 dt I B2 (14) 0 (1 )T T i Я 1 dt (15) 0 I Я1 T (1 )T i Я 2 dt I Я2 (16) 0 (1 )T T di L B B1 dt u L dt B1 uL 0 T B1 (1 di LB B 2 dt )T u L dt B2 uL 0 B2 (17) (1 (18) )T При линейной аппроксимации кривых тока в интервал 1 и 2 периода Т можно записать: (19) I B1 I B 2 I B (20) I Я1 I Я 2 I Я В этом случае uL B1 u L (1 B2 ) 0 (21) С учетом (19) и (21) уравнений (11) и (12) получим: 2004/2 Известия Петербургского университета путей сообщения Подвижной состав (RB 59 RЭ )I B RЭ I Я RB I B (1 Из (22) можно получить зависимость значений RШ , RT , RB : RЭ IВ I Я RЭ RB ) 0 (22) f ( ) для различных (23) Из уравнений (3) и (4) может быть получена характеристика скорости в функции коэффициента заполнения V f ( ) для двух последовательно соединенных двигателей V RЯ I Я RЯ (I Я IB ) 2сФ RT I Я (1 ) (24) Анализ формулы (23) показывает, что при постоянных значениях сопротивления, шунтирующего обмотку возбуждения, коэффициент ослабления линейно возрастает при малых RШ и нелинейно при значительных RШ , причем, в зонах малых коэффициентов заполнения наблюдается резкое увеличение . Для линейного изменения коэффициента ослабления возбуждения необходимо менять величину сопротивления RШ по линейному закону, что можно сделать, подключив параллельно шунтирующему резистору управляемый полупроводниковый ключ. Тогда величина шунтирующего резистора будет определяться коэффициентом заполнения импульсного цикла этого регулятора rШ RШ (1 ) (25) 3. Безындуктивная система регулирования возбуждения В случае использования импульсного преобразователя в режимах пуска тяговых двигателей появляется возможность достаточно просто реализовать режим импульсного рекуперативного торможения, особенностью которого является необходимость выполнения условия EBP Ud , (26) где E BP – ЭДС вращения последовательно включенных тяговых двигателей, U d – напряжение источника питания. При высоких начальных скоростях торможения ЭДС двигателей будет значительно больше напряжения питания, поэтому для реализации Известия Петербургского университета путей сообщения 2004/2 Подвижной состав 60 импульсного рекуперативного торможения необходимо либо включать дополнительный резистор в цепь рекуперации, либо использовать ослабление возбуждения. Первый способ снижает эффективность рекуперации, второй усложняет схему в целом. Предложена схема, которая позволяет реализовать коэффициент ослабления возбуждения равный 0,7 и 0,5 в режимах тяги и рекуперативного торможения, изображенная на рис.2. VD2 Нз ИР + Вп М1 ОВ1 М2 ОВ2 VS1 Вп VS2 К1 К Ш1 VD1 К2 Ш2 Rов Нз Rов - Рис.2.Схема безындуктивного регулирования возбуждения. В моторном режиме (замкнут К, разомкнуты Ш1 и Ш2) импульсным методом регулируется напряжение на зажимах тяговых двигателей. При включенном прерывателе ток от источника питания протекает по цепи: импульсный регулятор. якорные обмотки, обмотка возбуждения ОВ1, тиристор VS1 обмотка возбуждения ОВ2, контактор К. После выхода на автоматическую характеристику двигателей контакторы Ш1 и Ш2 замыкаются, переводя двигатели в режим ослабленного возбуждения. При импульсной рекуперации контактор К разомкнут, контакторы Ш1 и Ш2 включены, что уменьшает ЭДС вращения двигателей. 4. Заключение Одним из путей модернизации электропоездов является внедрение полупроводниковой техники в силовые схемы. Это дает возможность исключить индуктивные шунты, повысить надежность и быстродействие системы регулирования, улучшить ее массогабаритные показатели. 2004/2 Известия Петербургского университета путей сообщения